防撞倒车雷达技术规范
- 格式:docx
- 大小:17.38 KB
- 文档页数:5
倒车雷达的使用和注意事项倒车雷达是一种车辆安全装置,通过利用超声波技术来检测车辆周围的障碍物,帮助驾驶员在倒车时避免碰撞和事故。
在如今拥有越来越多车辆的城市环境中,倒车雷达的使用越来越普遍。
本文将介绍倒车雷达的使用方法以及使用过程中需要注意的事项。
让我们了解倒车雷达的工作原理。
倒车雷达通常由超声波传感器、控制模块和显示器组成。
超声波传感器负责发射超声波信号并接收回波,控制模块负责处理和分析接收到的信号,显示器则用来向驾驶员展示障碍物的距离和位置。
在使用倒车雷达时,有几个要点需要注意。
确保倒车雷达系统处于正常工作状态。
在启动车辆之前,检查一下倒车雷达系统是否正常运行,是否显示异常。
如果发现雷达系统有故障,应及时进行修理或更换。
正确安装超声波传感器是关键。
传感器通常安装在车辆的后保险杠上,需要保持传感器与地面平行,同时与后保险杠保持一定的间距。
安装时,应按照制造商提供的指南进行操作,确保传感器安装牢固。
在倒车过程中,驾驶员应始终保持警觉。
尽管倒车雷达可以提供辅助,但驾驶员仍然需要全神贯注地注意周围环境。
倒车雷达的作用是提醒驾驶员周围是否有障碍物,但并不能完全替代驾驶员的判断和操作。
倒车雷达通常会提供声音和图像等提示,以帮助驾驶员判断障碍物与车辆的距离和位置。
驾驶员应熟悉不同提示音和图像的含义,以便快速做出反应。
通常,随着障碍物距离减小,提示音会变得更加频繁或者更加紧促,图像也会相应变化。
在倒车行驶中,驾驶员应注意保持适当的车速。
过快的倒车速度会增加发生事故的风险,因为倒车雷达检测到障碍物后,可能无法及时提醒驾驶员。
倒车时,驾驶员应当使用后视镜和倒车镜来观察车辆周围情况,以确保安全。
在停车时,及时关闭倒车雷达系统。
倒车雷达主要用于倒车过程中的辅助,停车时无需额外的辅助。
关闭倒车雷达系统可以避免不必要的干扰和能源浪费。
总之,倒车雷达是一项非常有用的车辆安全装置,可以在倒车时提供有效的辅助。
然而,驾驶员仍然需要保持警觉,并根据环境情况做出正确的判断和操作。

一、wtsafe可视倒车安全预警系统V2.01、功能,部件及技术参数货车可视倒车雷达,货车影像式倒车雷达2、产品功能与工作模式:1.车辆电压:12-24V2.工作模式:当车辆启动,四个探头都开始工作;距探头1.5米或者3米以内的障碍物会通过蜂鸣器提示及显示器显示的方式提醒车主,当障碍物离探头越近,声音越急促。
声音与影像重叠一体机。
一)配套系统组成二)部件介绍1.专用控制盒l适应宽电压,可工作在24V和12V。
l专用防水设计,防水级别IP67。
l专用插头设计,稳固可靠。
l有防雷击设计,内含600W的TVS管。
l单机功耗:不超过1瓦。
l工业级工作温度设计:低温-40°,高温80°C。
l尺寸:长x宽x高=153x99x47mm。
l探头的最远探测距离为0~5m。
l当超声波探头接收到的反射波是在探测范围之内,系统就会输出报警信号。
l系统正常工作时,无论蜂鸣器是否提示障碍物,摄像头保持正常工作,显示器持续显示车后环境图像。
l多个探头均探测到障碍物时,探测到距离最近障碍物的探头激活系统报警。
探头探测距离报警参看下表。
2.专用蜂鸣器/语音盒蜂鸣器/语音盒l直接挂接在控制盒上,线缆长度不受车型限制。
(可选择内置显示器)l防水设计,防水级别IP67。
l音量不小于100Db。
l工业级工作温度设计:低温-40°,高温80°C。
3.专用探头(可选配)1、螺纹探头2、蝴蝶探头1,打孔探头,螺纹探头设计(可配支架),适应各种金属保险杠及厚度(螺丝钉固定安装)2,蝴蝶探头配支架,螺丝钉固定安装3,金属外壳探头,螺丝钉固定安装l防水设计,防水级别IP67。
l工作频率:40KHz。
l工业级工作温度设计:低温-40°,高温80°C。
l波束角度:单角度60-80度,可选择双角度Y=60-80度,X=100-120度。
4.专用电源线l定做电源线,0.5平方,牢固结实。
l长度50cm。

Q/SQR 奇瑞汽车股份有限公司企业标准Q/SQR . x x. x x x - 2008倒车雷达性能台架测试及评价试验规范奇瑞汽车股份有限公司前言本规范主要规定了奇瑞汽车股份有限公司系列车倒车雷达系统性能测试方法、试验条件。
本规范的编写与表述按奇瑞汽车股份有限公司企业标准Q/《倒车辅助系统技术要求》及ISO 17386-2003进行。
本规范是在满足奇瑞汽车产品性能要求的前提下制定的。
本标准作为公司开发新产品和抽检配套供应商供货质量的依据。
本规范由奇瑞汽车股份有限公司试验技术中心提出。
本规范由奇瑞汽车股份有限公司汽车工程研究院归口本规范起草单位:奇瑞汽车股份有限公司试验技术中心本规范首次发布日期是2008年XX月XX日。
本规范主要起草人:李川、郑春平、周琴倒车雷达性能台架测试及评价试验规范1 范围本规范适用于奇瑞汽车有限公司生产的系列车型所用倒车雷达系统台架性能测试及评价。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
Q/ 倒车辅助系统技术要求ISO 17386-2003 Intelligent Transportation Systems.Manoeuvring Aids for Low Speed Operation.Performance requirements and test procedures3 试验条件试验环境条件环境温度:23℃±5℃相对温度:25~75%气压:86~106kPa试验电压:13±4 性能要求探测区域分类根据Q/及ISO 17386-2003要求,把倒车雷达探测距离分为5段,见图1:OA(0~20cm]:由倒车雷达探头换能器工作原理决定,该区域为不定状态区域,因此在测试过程中可以不进行测试;OS(0~35cm):为急停区域,当障碍物出现在在区域内时,必须停车,且声音报警声长鸣;SB[35~60cm]:为急停区域,当障碍物出现在在区域内时,必须停车,且声音报警声急促4Hz;BC(60~90cm]:为缓行区,在该区域内,车辆应该减慢车速,保证车速在5km/h内(在实际行驶过程中),且声音报警声频率2Hz;CD(90~150cm]:为预警区,表示障碍物已经进入车辆倒车辅助系统进行提示作用,保证车速在5km/h内(在实际行驶过程中),且声音报警声频率1Hz。
Q/RS倒车雷达东荣电子(广州)有限公司发布目次前言 (II)1 范围 (1)2 规范性引用文件 (1)3 术语和定义 (1)4 测试条件 (2)5 技术要求 (2)6 试验方法 (3)7 环境实验要求 (4)8 检验规则 (4)9 标志、标签和包装 (7)前言本标准是参考QC/T 413-2002 《汽车电气设备基本技术条件》、GB/T 17619-1998《机动车电子电器组件的电磁辐射抗扰性限值和测量方法》和GB 18655-2002 《用于保护车载接收机的无线电骚扰特性的限值和测量方法》进行编写的。
本标准由东荣电子(广州)有限公司企业标准品质部归口。
本标准起草单位:东荣电子(广州)有限公司企业标准工程部。
本标准主要起草人:本标准于2007年5月首次发布。
倒车雷达1 范围本标准规定了本公司生产的倒车雷达的要求、试验方法、检验规则、标志、标签和包装。
本标准适用于本公司生产的倒车雷达。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
QC/T 413-2002 汽车电气设备基本技术条件GB2828—1987逐批检查计数抽样程序及抽样表(适用于连续批的检查)GB18052—1987周期检查计数抽样程序及抽样表(适用于生产过程稳定性的检查)GB/T 17619-1998《机动车电子电器组件的电磁辐射抗扰性限值和测量方法》GB 18655-2002《用于保护车载接收机的无线电骚扰特性的限值和测量方法》3 术语和定义3.1 倒车雷达系统通常由倒车雷达主机和雷达探头、蜂鸣器、显示器组成。
通过发射/接收超声波信号,探测汽车后方障碍物距离,用声音提示和显示测量的距离,达到协助驾驶员安全倒车的作用。
第1篇一、项目背景随着汽车行业的快速发展,人们对汽车安全性能的要求越来越高。
倒车雷达作为一种有效的辅助驾驶设备,能够有效减少倒车时的碰撞事故,提高驾驶安全性。
本方案旨在为汽车倒车雷达的安装提供一套完整的施工方案,确保施工质量,提高施工效率。
二、施工目的1. 提高汽车倒车安全性,减少倒车事故。
2. 优化驾驶体验,提升驾驶便利性。
3. 增强汽车竞争力,满足消费者对安全性能的需求。
三、施工范围本方案适用于各类汽车,包括轿车、SUV、MPV等。
四、施工准备1. 人员准备:组建专业的施工团队,包括施工人员、技术支持和质量检查人员。
2. 设备准备:准备倒车雷达安装工具、测试设备、辅助材料等。
3. 材料准备:准备倒车雷达传感器、连接线、安装支架等。
五、施工流程1. 现场勘查:对施工车辆进行现场勘查,了解车辆结构,确定倒车雷达的安装位置。
2. 施工方案制定:根据现场勘查结果,制定详细的施工方案,包括倒车雷达的安装位置、连接方式、测试方法等。
3. 施工准备:按照施工方案准备所需材料和设备。
4. 倒车雷达安装:- 定位:根据车辆结构和倒车雷达的安装要求,确定倒车雷达的安装位置。
- 固定:使用安装支架将倒车雷达固定在车辆指定位置。
- 连接:将倒车雷达的连接线与车辆电气系统连接,确保连接牢固。
- 测试:进行倒车雷达功能测试,确保倒车雷达正常工作。
5. 质量检查:对安装的倒车雷达进行检查,确保安装质量符合要求。
6. 验收:施工完成后,进行验收,确保倒车雷达功能正常,满足使用要求。
六、施工要点1. 安装位置:倒车雷达的安装位置应选择在车辆后保险杠下方,距离地面约50cm 处,确保倒车雷达能够覆盖到车辆后方一定范围内的障碍物。
2. 连接线:倒车雷达的连接线应使用专用线材,确保连接牢固,避免因连接线松动导致倒车雷达失效。
3. 安装支架:安装支架应选择合适的材质,确保支架的稳定性和可靠性。
4. 测试:安装完成后,应对倒车雷达进行功能测试,确保倒车雷达在所有角度下都能正常工作。

![倒车雷达[总结]](https://uimg.taocdn.com/e410bbeaf605cc1755270722192e453610665b87.webp)
保障汽车驾驶时的自动性、舒适性和安全性是智能汽车一直追求的目标。
为保障驾车安全,发展汽车防撞技术十分关键。
世界各国对汽车防撞技术的研究和发展投入了大量的人力、物力和财力。
而这一技术的关键却是车辆测距技术。
汽车必须凭借一定的装备测量前方障碍物的距离,并迅速反馈给汽车,以在危急的情况下,通过报警或自动进行某项预设定操作如紧急制动等,来避免由于驾驶员疲劳、疏忽、误判断所造成的交通事故。
据统计,危险境况时,如果能给驾驶员半秒钟的预处理时间,则可分别减少追尾事故的30%,路面相关事故的50%,迎面撞车事故的 60%。
与此同时,在智能汽车中,测距并反馈路况信息是汽车的自动化行驶的关键。
由此可见,测距技术对保障行车安全,提高汽车智能化水平有重要意义。
现在运用在汽车上的测距方法主要有超声波短距离测距,毫米波雷达长距离测距,摄像系统测距,激光测距,夜间应用的红外线测距等几种方法。
—、超声波距离测距超声波一般指频率在20KHE以上的机械波,具有穿透性较强、衰减小、反射能力强等特点,超声波测距仪器一般由发射器、接收器和信号处理装置三部分组成。
工作时,超声波发射器不断发出一系列连续的脉冲,并给测量逻辑电路提供一个短脉冲。
超声波接收器则在接收到遇障碍物反射回来的反射波后,也向测量逻辑电路提供一个短脉冲。
最后由信号处理装置对接收的信号依据时间差进行处理,自动计算出车与障碍物之间的距离。
超声波测距原理简单,成本低、制作方便,但其在高速行驶的汽车上的应用有一定局限性,这是因为超声波的传输速度受天气影响较大,不同的天气条件下传播速度不一样;另一方面是对于远距离的障碍物,由于反射波过于微弱,使得灵敏度下降。
故超声波测距一般应用在短距离测距,最佳距离为4—5米,一般应用在汽车倒车防撞系统上。
二、性能稳定的毫米波雷达长距离测距雷达是利用目标对电磁波反射来发现目标并测定其位置的。
汽车上应用的雷达采用的是30GHZ以上的毫米波雷达。
毫米波频率高、波长短,一方面可缩小从天线辐射的电磁波射束角幅度,从而减少由于不需要的反射所引起的误动作和干扰,另一方面由于多普勒频移大,相对速度的测量精度高。
毕业设计任务书专业电子工艺与管理年级 XXX 班级一班姓名 XXX 学号 XXX超声波倒车雷达摘要倒车雷达又称泊车辅助系统,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。
一般由超声波传感器(俗称探头)、控制器和显示器等部分组成,现在市场上的倒车雷达大多采用超声波测距原理,驾驶者在倒车时,启动倒车雷达,在控制器的控制下,由装置于车尾保险杠上的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出警示信号,得到及时警示,从而使驾驶者倒车时做到心中有数,使倒车变得更轻松。
倒车雷达的提示方式可分为液晶、语言和声音三种;接收方式有无线传输和有线传输等。
本方案采用语音提示的方式,本文介绍了以SPCE061A单片机为核心的一种低成本、高精度、微型化,并有数字显示和声光报警功能的倒车雷达系统。
利用SPCE061A 单片机所具备的单芯片语音功能,外接三个超声波测距模组,组成一个示例的倒车雷达系统,语音提示报警(0.35m~1.5m)范围内的障碍物。
关键词:倒车雷达超声波单片机SPCE061A目录第1章前言 (1)第2章实现功能 (2)第3章核心器件简介 (3)3.1 SPCE061A (3)3.1.1 SPCE061A简介 (4)3.1.2 芯片特性 (4)3.2 SPCE061A精简开发板 (4)3.3 超声波测距模组 (5)3.4 转接板 (9)第4章系统总体方案 (11)第5章系统硬件设计 (12)5.1 SPCE061A精简开发板电路原理 (12)5.1.1 SPCE061最小系统 (12)5.1.2 电源模板 (12)5.1.3 放音模板 (13)5.2 超声波测距模组电路原理 (13)5.2.1 超声波谐振频率发生电路、调理电路 (13)5.2.2 超声波回波接受处理电路 (14)5.2.3 超声波测距模组电源接口 (14)5.2.4 超声波测距模式选择跳线 (15)5.2.5 超声波测距模组接口 (15)5.3 转接板电路 (15)5.4 显示电路 (16)第6章系统软件设计 (17)6.1 超声波测距原理 (17)6.2 软件结构 (18)6.3 各模块程序说明 (18)6.3.1 超声波测距程序 (18)6.3.2 语音播放程序 (22)6.3.3 显示刷新程序 (23)6.3.4 主程序 (25)第7章连接与操作说明 (26)参考文献 (29)致谢 (30)第一章前言倒车雷达又称泊车辅助系统,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。
目录摘要 (1)目录 (1)绪论 (3)第一章汽车防撞报警系统设计简介 (4)1.1 设计概要 (4)1.1.1设计任务与要求 (4)1.1.2研究方法 (4)1.1.3解决的关键问题 (4)1.2 汽车防撞报警系统设计的意义 (5)第二章设计思路分析 (7)2.1 系统总体方案 (7)2.2 工作原理 (8)2.3 控制器AT89C2051的功能特点 (8)第三章系统硬件电路设计 (9)3.1 系统硬件方案设计 (9)3.2 遥控器控制框图 (10)3.3 工作原理剖析 (11)3.3.1传感器的选择 (11)3.3.2超声波的发射与接收电路 (11)3.3.3测速原理 (12)3.4 实物设计所能达到的功能及操作说明 (12)第四章系统软件电路设计 (14)4.1 主程序 (14)4.2 串口通信模块——transplant.C (15)4.3 程序编写 (16)第五章调试与测试 (18)总结 (19)参考文献 (20)附录1 (20)附录2 (22)致谢 (25)绪论随着时代的发展及社会的进步,越来越多的汽车进入了普通人的家庭。
汽车逐渐成为人们生活中不可缺少的一部分。
尽管公路条件在不断地改进,但仍然避免不了公路上汽车拥挤的现状,再加上设计车速不断提高,恶性交通事故无时无刻不在发生,给人们和社会带来了巨大的生命与财产损失。
汽车防撞报警系统也因此应用而生。
汽车防撞报警系统是一种当汽车离障碍物较近时向司机预先发出报警信号的装置,通常系统的各个探测器安装于汽车的几个关键的车身部位,能探测到接近车身的行人、车辆和周围的障碍物,能向司机或乘客提前发出即将发生撞车危险的信号,促使司机甚至撇开司机采取应急措施处理特殊险情,避免损失。
同时当汽车发生故障时,可以通过按动警示信号键向过往的车辆发送无线警示信号,提醒过往车辆的司机注意,从而更有效地避免交通事故的发生。
汽车的各种方便性正不断地被人们所接受,现如今如同是一般的家用电器一样地进入平常百姓的家中,开发本系统,可以广泛地安装于各种家用轿车、客车、货车等,如与车载微型电脑相配合,可以实现更多的人工智能化操作,是实现汽车无人驾驶必不可少的一个组成部分,也是未来汽车的发展方向,因此运用前景是相当可观。
汽车倒车防撞雷达系统设计摘要:本文在查阅分析了现有的几种不同测距原理后,确定了使用超声波测距,并对基于超声波测距的倒车雷达报警系统的设计进行了深入分析和研究。
该系统分为系统控制模块、超声波发射模块、超声波接受模块、温度采集模块和液晶显示及声光报警模块。
在硬件电路中,详细阐述了运用单片机技术实现的倒车雷达报警系统的测距实现原理,分析了以ATMEGA16单片机为主控单元的硬件系统和软件设计,并分别对每个模块进行了分析,使我们对该系统由较好的认识和理解。
关键词:倒车雷达超声波测距1 概述在现代社会中,随着汽车的增多和停车位日趋紧张,泊车成为很多车主头痛的问题,这时汽车倒车防撞报警系统就成了汽车的好助手。
汽车倒车防撞报警系统是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了倒车的安全性。
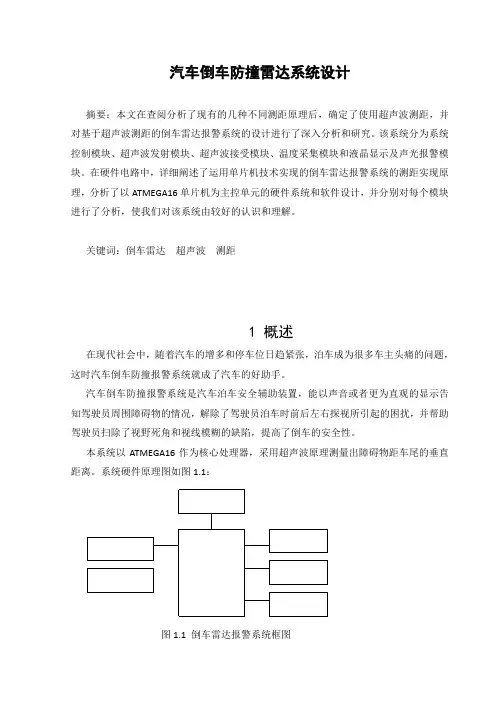
本系统以ATMEGA16作为核心处理器,采用超声波原理测量出障碍物距车尾的垂直距离。
系统硬件原理图如图1.1:图1.1 倒车雷达报警系统框图该系统整体设计思路如下:警报系统装于汽车尾部,与汽车倒车闸相连,当汽车倒车时,该报警系统开始工作。
ATMEGA16单片机为主控模块,将各个子模块联系起来共同工作,当超声波模块发出脉冲信号时,主控模块内部计数器开始工作。
超声波接收模块接到障碍物反射回来的声波后将信号传递给主控模块,主控模块内部的计数器计数停止,从而得到声波往返所用时间。
温度采集模块不断测试环境温度,并将此信息传递给主控模块。
主控模块根据温度得出此时超声波速度,进而计算出此时汽车尾部与障碍物的距离。
主控模块距离信息传递给液晶显示模块和声光报警模块,使液晶显示屏显示当前车尾与障碍物的距离,同时控制声光报警模块,当距离小于设定值时发出声光警报,从而提醒司机注意,防止倒撞。
2 系统硬件电路设计系统电路主要由三大部分组成:(1)超声波发射接收模块;(2)ATMEGA16单片机主控模块;(3)距离显示模块和声光报警模块。

倒车雷达技术规范(1)2012-06-25 16:19:33 来源:21ic关键字:倒车雷达规范性警报状态1 范围本标准规定了车用倒车雷达的分类与名词解释、要求、试验方法、检验规则和标志、包装、运输、贮存等内容。
2 规范性引进文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
3 分类与名词解释3.1分类数字信号倒车雷达。
型号命名PS220.(J)-01、PS220.(J)-02、PS220.(J)-03…3.2.1无警报状态车辆未挂入倒车档,倒车雷达系统等待进入工作的状态。
3.2.2激活状态当车辆挂入倒车档后,倒车雷达所处的状态。
3.2.3自我检测状态当倒车雷达系统被激活后,会对系统本身(包括:火线,接地线,内部信号处理线路等)进行测试,当发现有断路或故障时蜂鸣器会处于一种循环报警状态。
如果故障排除系统会自动进入侦测状态。
3.2.4侦测报警状态系统正常的工用状态。
在此时期间如果系统侦测到障碍物,也就是蜂鸣器接到报警命令进行报警。
4 要求4.1外观要求外观整洁,表面不应有明显凹痕,划伤,锈蚀,印字清晰,正确,紧固部位无松动,传感器表面喷涂应与所安装的保险杠表面喷涂颜色统一。
4.2环境要求4.2.1使用环境温度a.超声波探测器:-30℃~80℃b.主机控制器:-30℃~80℃c.显示器(液晶屏):-25℃~65℃4.2.2贮存环境温度a.超声波探测器:-40℃~85℃b.主机控制器:-40℃~85℃c.显示器(液晶屏):-30℃~70℃4.2.3相对湿度3%~93%4.3电器性能要求4.3.1超声波探测器a.额定工作电压:120V(40KHz±1 KHz脉冲)c.工作电压范围:50V~160V(40KHz±1 KHz脉冲)d.最大过载电压:180V(40KHz±1 KHz脉冲)持续1秒e.工作频率:40KHz±1 KHzf.谐振电容:2000pF±15%(本文转自电子工程世界:/qrs/2012/0625/article_10712.html) g.回波灵敏度:≥-80dBh.余振:≤1.4msi.阻抗:500Ωh.最大工用温度:85℃i.最小工作温度:-40℃表面没有冰雪覆盖的情况下g.电流消耗关闭状态≤1mA开启状态≤10mA4.3.2主机控制器a.额定工作电压:12V直流电b.额定功率:≤5Wc.工作电压范围:9~16V直流电d.最大过载电压:24V直流电持续1秒e.反向电压:-18V直流电持续1秒f.最大工用温度:80℃g.最小工作温度:-30℃h.电流消耗关闭状态《2mA在12V直流电下开启状态《300mA在12V直流电下i.辐射频率:《1MW CWg.工作频率:40KHz±1 KHzk.频率波段中的虚拟散失41MHz~68MHz《4nW87.5MHz~118MHz《4nW162MHz~230MHz《4nNW470MHz~862MHz《4nNW等于1GHZ《250nW大于1GHZ《1uW4.3.3显示器(液晶屏)a.额定工作电压:12V直流电b.额定功率:≤5Wc.工作电压范围:9~16V直流电d.最大过载电压:24V直流电持续1秒e.反向电压:-18V直流电持续1秒f.最大工用温度:65℃g.最小工作温度:-25℃h.电流消耗关闭状态《2mA在12V直流电下开启状态《400mA在12V直流电下休眠状态:《10mA在12V直流电j.蜂鸣器音量:(85±10)dB/10m/12V直流电下。
用户使用手册前言尊敬的客户感谢您选择了无线倒车雷达系统。
本系统是一套汽车倒车泊车的安全辅助系统配置了四个进口超声波探头进行探测能准确测知车后1.8M以内是否有障碍物利用单片机进行高速扫描运算无线连接并通过LCD智能彩色夜光显示器将障碍物状态动感仿真显现出来。
采用单探头识别技术精确显示障碍物方位专利内驻自动检测程序技术设置利用声音和图像提醒驾驶员使您在拥挤的场合、雨天以及夜晚也能“倒车自如”从而实现对碰撞防患于未然。
本系统安装后能使您的座驾拥有全方位的泊车防撞安全系统倒车、泊位得心应手让您真正体会到轻松驾驶的乐趣和享受现代科技带来的完美生活。
我们真诚地感谢您对我们的支持为确保安装及使用的品质请详阅系统说明书。
万华科技汽车用品有限公司特点独创技术专利产品超薄宽屏LCD彩显无线技术不拆原车内饰不破坏原车线路动感仿真画面车轮滚动互动报警提示内设自检程序节省维修成本逐级变声报警方式任意调节音量车牌架安装接线图如图反转车牌及车牌架把车牌插到车牌架卡位上。
如图1、螺丝2、车牌架3、车牌4、胶圈如图车牌架总成安装如图1、把车牌架套到车上确定探头线入口位置。
如图2、在确定位置开孔开孔前看清楚里面以免损坏其他部件。
如图3、把探头线从开孔进入车内线上防水胶塞固定在孔上。
如图4、用螺丝固定车牌总成。
注意探头探测方向要平行地面。
可用胶圈调整如图5按装完备后。
从倒车灯引出电源把主机电源线与倒车灯电源并接。
显示器功能显示器安装接线图数码距离显示如图显示探头与最近障碍物距离由0.4—1.8M米超过1.8米显示0.0M 中间斜放探头显示0.8M—1.5M 语音报读完整的距离能听清真实距离。
真人发声体验真正“语音” 音量调节由上升.下降来完成报警方式如图分段接近障碍物距离警报声音超声波备注 1 1.80.7M安全区语音报距离减速车距 2 0.60.3M危险区停车?DI?DI?DI?DI? 危险车距1、不同物体测试范围举例目标物体有效检测距离墙面1平方米1.8M以下小汽车、轿车1.3M 以下成年人1.0M或以下0.4M×1.0M柱子1.0M或以下一、功能示意图1、静止状态车身后附近无障碍物。
收稿日期:2007-10作者简介:刘洪恩(1963 ),男,副教授,高级工程师,主要从事单片机的教学和科研工作。
汽车倒车防撞超声波雷达的设计刘洪恩(淮安信息技术学院,江苏淮安223003)摘要:分析超声波的测距原理。
为提高发射强度和接收抗干扰能力,设计了推挽式超声波发射驱动电路和锁相环接收电路。
以单片机进行计时、控制和运算,实现了距离的显示和当距离小于设定值时的报警功能。
实际应用表明,测量准确、性能稳定,提高了倒车的安全性。
关键词:超声波;发射与接收;单片机;测距中图分类号:T P368.1 文献标识码:B 文章编号:1006-2394(2008)04-0008-02D esi gn of U ltrasonic Preventi ng Collisi on Radar for A uto R eversi ngL IU H ong en(Hua i an Co lleg e o f Infor m ation T echno logy ,H ua i an 223003,Ch i na)Abst ract :The pr i n ciple of using ultrasonic distance m easure m ent is analyzed .In order to raise e m isson intensity and anti ja mm i n g capability of rece i v ing si g na,l t h e push pu ll drive launch circ u it and PLL rece iver circu it are de si g ned.A m icr opr osessor core m easuri n g ti m e ,con tro l and ca lculati o n ,realized a distance disp lay and alar m w hen the distance is shorter than setti n g .Practical aplication sho w s tha tm easure m ent accurate ,perfor m ance stable ,reversi n g i n creased security .K ey w ords :ultrasonic ;launc h i n g and receiving ;m icroprosessor ;distance m easure m ent1 超声波测距原理超声波的指向性强,能量消耗缓慢,遇到障碍物后反射效率高,是测距的良好载体。
LED显示汽车防撞倒车雷达摘要:倒车雷达是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了驾驶的安全性。
倒车雷达主要由三部分组成:感应器(探头)、主机和显示设备。
感应器发出和接收超声波信号,然后将得到的信号传输到主机里面的电脑进行分析,再通过显示设备显示出来。
本文主要阐述基于单片机的多方位倒车雷达的原理以及设计过程。
关键词:倒车雷达单片机超声波测距LED 汽车安全技术1.1 选题背景汽车电子是车体汽车电子控制装置和车载汽车电子控制装置的总称。
车体汽车电子控制装置,包括发动机控制系统、底盘控制系统和车身电子控制系统(车身电子ECU)。
汽车电子最重要的作用是提高汽车的安全性、舒适性、经济性和娱乐性。
用传感器、微处理器MPU、执行器、数十甚至上百个电子元器件及其零部件组成的电控系统。
汽车电子化被认为是汽车技术发展进程中的一次革命,汽车电子化的程度被看作是衡量现代汽车水平的重要标志,是用来开发新车型,改进汽车性能最重要的技术措施。
汽车制造商认为增加汽车电子设备的数量、促进汽车电子化是夺取未来汽车市场的重要的有效手段,据统计从1989年至2000年,平均每辆车上电子装置在整个汽车制造成本中所占的比例由16%增至23%以上。
一些豪华轿车上,使用单片微型计算机的数量已经达到48个,电子产品占到整车成本的50%以上,目前电子技术的应用几乎已经深入到汽车所有的系统。
1.2 研究意义汽车电子技术的应用将使汽车更加智能化。
智能汽车装备有多种传感器,能够充分感知驾车者和乘客的状况,交通设施和周边环境的信息,判断乘员是否处于最佳状态,车辆和人是否会发生危险,并及时采取对应措施。
今天,社会进入了信息网络时代,人们希望汽车不仅仅是一种代步工具,更希望在汽车是生活及工作范围的一种延伸,在汽车上就像呆在自己的办公室和家里一样,可以收听广播,打电话,上互联网,处理工作。
倒车雷达技术规范
时间:2012-06-18 16:38:52 来源:作者:
1 范围
本标准规定了车用倒车雷达的分类与名词解释、要求、试验方法、检验规则和标志、包装、运输、贮存等内容。
2 规范性引进文件
下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
3 分类与名词解释
3.1分类
数字信号倒车雷达。
型号命名PS220.(J)-01、PS220.(J)-02、PS220.(J)-03…
3.2.1无警报状态
车辆未挂入倒车档,倒车雷达系统等待进入工作的状态。
3.2.2激活状态
当车辆挂入倒车档后,倒车雷达所处的状态。
3.2.3自我检测状态
当倒车雷达系统被激活后,会对系统本身(包括:火线,接地线,内部信号处理线路等)进行测试,当发现有断路或故障时蜂鸣器会处
于一种循环报警状态。
如果故障排除系统会自动进入侦测状态。
3.2.4侦测报警状态
系统正常的工用状态。
在此时期间如果系统侦测到障碍物,也就是蜂鸣器接到报警命令进行报警。
4 要求
4.1外观要求
外观整洁,表面不应有明显凹痕,划伤,锈蚀,印字清晰,正确,紧固部位无松动,传感器表面喷涂应与所安装的保险杠表面喷涂颜色统一。
4.2环境要求
4.2.1使用环境温度
a.超声波探测器:-30℃~80℃
b.主机控制器:-30℃~80℃
c.显示器(液晶屏):-25℃~65℃
4.2.2贮存环境温度
a.超声波探测器:-40℃~85℃
b.主机控制器:-40℃~85℃
c.显示器(液晶屏):-30℃~70℃
4.2.3相对湿度
3%~93%
4.3电器性能要求
4.3.1超声波探测器
a.额定工作电压:120V(40KHz±1 KHz脉冲)
c.工作电压范围:50V~160V(40KHz±1 KHz脉冲)
d.最大过载电压:180V(40KHz±1 KHz脉冲)持续1秒
e.工作频率:40KHz±1 KHz
f.谐振电容:2000pF±15%
g.回波灵敏度:≥-80dB
h.余振:≤1.4ms
i.阻抗:500Ω
h.最大工用温度:85℃
i.最小工作温度:-40℃表面没有冰雪覆盖的情况下
g.电流消耗
关闭状态≤1mA
开启状态≤10mA
4.3.2主机控制器
a.额定工作电压:12V直流电
b.额定功率:≤5W
c.工作电压范围:9~16V直流电
d.最大过载电压:24V直流电持续1秒
e.反向电压:-18V直流电持续1秒
f.最大工用温度:80℃
g.最小工作温度:-30℃
h.电流消耗
开启状态《300mA在12V直流电下i.辐射频率:《1MW CW
g.工作频率:40KHz±1 KHz
k.频率波段中的虚拟散失
41MHz~68MHz《4nW
87.5MHz~118MHz《4nW
162MHz~230MHz《4nNW
470MHz~862MHz《4nNW
等于1GHZ《250nW
大于1GHZ《1uW
4.3.3显示器(液晶屏)
a.额定工作电压:12V直流电
b.额定功率:≤5W
c.工作电压范围:9~16V直流电
d.最大过载电压:24V直流电持续1秒
e.反向电压:-18V直流电持续1秒
f.最大工用温度:65℃
g.最小工作温度:-25℃
h.电流消耗
关闭状态《2mA在12V直流电下
开启状态《400mA在12V直流电下
j.蜂鸣器音量:(85±10)dB/10m/12V直流电下。
(在额定工作电压12V,距蜂鸣器正上方10cm处,测的音量为(85±10)dB。