基于MSP430单片机的倒车雷达设计
- 格式:pdf
- 大小:180.53 KB
- 文档页数:2
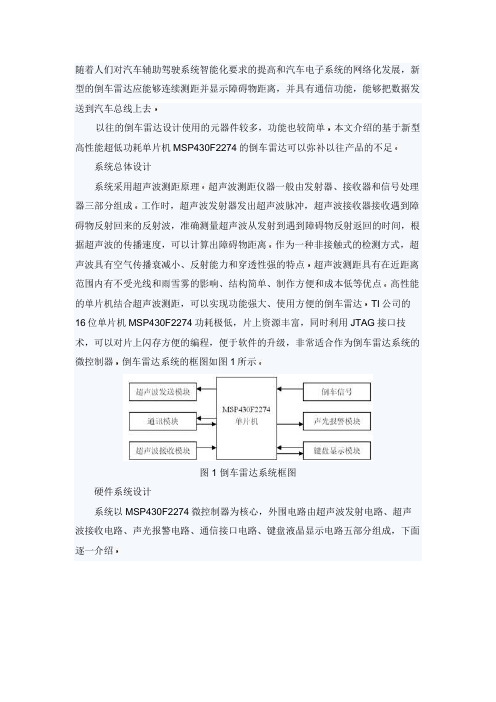
随着人们对汽车辅助驾驶系统智能化要求的提高和汽车电子系统的网络化发展,新型的倒车雷达应能够连续测距并显示障碍物距离,并具有通信功能,能够把数据发送到汽车总线上去以往的倒车雷达设计使用的元器件较多,功能也较简单本文介绍的基于新型高性能超低功耗单片机MSP430F2274的倒车雷达可以弥补以往产品的不足系统总体设计系统采用超声波测距原理超声波测距仪器一般由发射器、接收器和信号处理器三部分组成工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离作为一种非接触式的检测方式,超声波具有空气传播衰减小、反射能力和穿透性强的特点超声波测距具有在近距离范围内有不受光线和雨雪雾的影响、结构简单、制作方便和成本低等优点高性能的单片机结合超声波测距,可以实现功能强大、使用方便的倒车雷达TI公司的16位单片机MSP430F2274功耗极低,片上资源丰富,同时利用JTAG接口技术,可以对片上闪存方便的编程,便于软件的升级,非常适合作为倒车雷达系统的微控制器倒车雷达系统的框图如图1所示图1 倒车雷达系统框图硬件系统设计系统以MSP430F2274微控制器为核心,外围电路由超声波发射电路、超声波接收电路、声光报警电路、通信接口电路、键盘液晶显示电路五部分组成,下面逐一介绍图2 倒车雷达系统主控电路图系统的主控电路图如图2所示本系统中选用的MSP430F2274片内有32Kb 闪存和1Kb RAM,因此无须外扩存储器外接的32.768kHz晶振作为CPU关闭状态Basic-Timer的时钟源,同时也作为系统的车载时钟使用超声波发送模块电路如图3所示,由超声波产生和发射两部分组成超声波的产生方法有两种:硬件发生法和软件发生法常用的硬件发生法常采用如下方案:超声波由CD4011构成的振荡器振荡产生,经升压变换推动超声波换能器而发射出去,振荡器的起振和停振由单片机来控制本设计采用软件发生法,因为通过软件发生法既可以减少硬件的复杂程度,降低系统的成本,又具有灵活性强、容易实现、稳定性好的优点本系统利用MSP430F2274单片机的定时器功能来产生稳定的PWM(40Hz)脉冲波,并通过I/O端口P2.3输出到超声波发射部分在超声波发射电路中CD4049一共包括了6个非门,图3中线路仅使用了3个,为了防止干扰或被静电击穿导致整个CD4049损坏,把没有使用的那一侧的3个非门串起来做接地处理当控制端输出一系列固定频率脉冲时,在压电陶瓷型超声波发射换能器UCM-40-T上就固定频率的加正电压和反电压,发出大功率的超声波,所得到的波形比其他方式效果更理想图3 倒车雷达超声波发送模块超声波接收电路如图4所示这是本系统设计和调试的一个难点压电陶瓷型超声波接收器 UCM-40-R 接收反射的超声波转换为40kHz毫伏级的电压信号,需要经过放大、处理、才能用于触发单片机中断一方面传感器输出信号微弱,由于反射条件不同,需要放大倍数的范围大约是100~5000,另一方面传感器输出阻抗较大,需要高输入阻抗的多级放大电路,而高输入阻抗容易接收干扰信号通常采用两种方案:一是采用运算放大器组成多级选频放大电路;二是采用专用的集成前置放大器第一种方案容易产生自激振荡,要使接收电路达到很好灵敏度和抗干扰效果,电路的调试是较困难的本系统采用专用的集成电路前置放大器CX20106,它由前置放大器、限幅放大器、带通滤波器、检波器、积分器、整型电路组成其中前置放大器具有自动增益控制功能,可以保证在超声波传感器接收较远反射信号输出微弱电压时放大器有较高的增益,在近距离输入信号强时放大器不会过载调节芯片引脚5的外接电阻R3,将它的滤波器的中心频率设置在40kHz,达到了很好的效果当接收到与滤波器中心频率相符的信号时,其输出引脚7输出一个低电平,而输出引脚7直接接到MSP430F2274的P2.2上,以触发中断图4 倒车雷达超声波接收模块图5 倒车雷达声光报警电路图报警模块采用简单的声光报警电路,如图5所示先设定一个临界值,当车尾与障碍物的距离小于设定的最小距离时,红色指示灯闪亮,绿色指示灯熄灭单片机向其端口发出PWM脉冲,随着距离的减小,通过控制PWM脉冲的占空比使闪光和蜂鸣的频率加剧,以此来提示驾驶员图6 倒车雷达通信接口电路图通信接口电路如图6所示采用美信的MAX3232芯片,外围电路非常简单,只需要5个0.1μF的电容器该电路把单片机串口输出信号隔离变换成 RS-232信号发送到汽车总线上,同时还可以实现该系统与计算机的通信图7 倒车雷达键盘显示电路图键盘和显示电路如图7所示,由键盘和液晶显示两部分组成其中键盘采用独立式按键,有3个按键,一个设置键、一个上翻键、一个下翻键可以进行报警值、工作方式、时钟等各个参数的设置液晶显示电路采用ZJM12864BSBD这款低功耗的点阵图形式LCD,显示格式为128点(列)×64点(行),具有多功能指令,容易使用,可实时的显示时钟、距离和报警提示信息,方便直观系统软件设计软件采用模块化设计,程序由主程序、测距子程序和键盘显示子程序、时钟显示子程序等多个模块组成,调试过程中对其中每个功能模块和子程序逐一调试,在每个子程序都完成指定的功能后,再进行综合调试系统的软件流程如图8所示图8 系统软件流程图超声波发射电路发出超声波的同时计数器开始计数,当遇到障碍物反馈信号到超声波接收器接收,经CX20106接收电路处理后,产生一个低脉冲,该信号传送给单片机产生中断,调用测距子程序,计算出测量距离,调用显示子程序,根据不同的测量数值在液晶上显示距离和报警当距离大于2m ,显示“安全”和测量距离,继续测量;当距离小于1m 时,显示“危险”和测量距离,由P1.2位驱动蜂鸣器报警;当距离小于2m 且大于1m 时,显示“注意”和测量距离为增强抗干扰能力,系统连续发射超声波测量三次,从中剔除最大最小值,取中间值计算出精确的距离这样每秒可测约三个数据,仍然可以满足实时性要求结语该倒车雷达采用了高性能的MSP430F2274单片机,并充分利用了其片上资源使得系统功能丰富,使用的外围芯片减少,系统可靠性得到提高该倒车雷达应用于汽车中,当驾驶员倒车时,从液晶显示屏上一目了然便知道障碍物离车的距离,克服了后视镜小,视野窄的缺点,消除了倒车造成的事故隐患汽车倒车雷达安装使用说明书VD-V4倒车雷达由控制主机,超声波传感器,摄像头三部分组成在倒车时自动启动并将车后情况实时通过Av 信号输出,可通过车载显示器显示,车尾超声波探测波探测情况也通过字符方式同步显示,形象直观。

基于单片机的倒车雷达系统设计随着汽车数量的增多,道路的拥堵也越来越严重,特别是在城市里,车辆的进出显得异常棘手。
在这种情况下,需要特别注意的是倒车,因为倒车是道路上发生事故的重要原因之一。
为了解决这个问题,智能车辆倒车雷达系统应运而生。
本文将介绍基于单片机设计的倒车雷达系统。
设计方案倒车雷达系统的主要由以下元件组成:1. 超声波传感器:超声波传感器是倒车雷达系统的核心组件。
这种传感器用于发送超声波,并接收反射波。
它可以非常精确地测量超声波的时间和返回时间,以计算距离。
当车辆接近物体时,超声波传感器会发出指示。
2. 电路板:集成电路板将用于控制和处理超声波传感器发出的信号。
3. 显示屏:显示屏在车内用于显示不同距离的图形。
4. 微处理器:微处理器将用于控制整个系统并计算距离。
设计步骤下面是基于单片机的设计方案的步骤:1. 收集所需的零件并制作电路板:可以使用基本的电荷耦合器和其他所需的元件来集成电路板。
此电路板将用于控制和处理超声波传感器发出的信号。
2. 连接超声波传感器:将超声波传感器连接到电路板并确认它可以正常工作。
3. 编写程序:首先使用MCU IDE编写程序,然后将程序烧写到微控制器中,然后进行调试。
编写程序的目的是通过检测声波来计算距离,并将结果显示在显示器上。
4.安装显示屏和电路板:将电路板安装到车的后部,并将显示器安装在驾驶员区域。
然后将超声波传感器安装在车辆后部。
5.测试:在测试系统之前,请确保使车辆处于安全的停放区域。
开启呃泥制动器,然后启动车辆,将车辆倒车到检查距离,并查看显示屏上显示的值。
如果需要,可以调整超声波传感器的角度来更精确的检测距离。
总结基于单片机的倒车雷达系统具有安装简单、使用方便、成本低等优点。
车辆轻松倒车时,能够及时警示驾驶员,有效避免车辆碰撞和损坏。
建议广大车主在安全上考虑并安装此类倒车雷达系统。

基于单片机的汽车倒车雷达系统设计摘要随着社会经济的发展交通运输业日益兴旺,汽车的数量在大副攀升。
交通拥挤状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失,针对这种情况,设计一种响应快,可靠性高且较为经济的汽车防撞预警系统势在必行,超声波测距法是最常见的一种距离测距方法,本文介绍的就是利用超声波测距法设计的一种倒车防撞系统。
论文的内容是基于AT89C51单片机倒车防撞系统的设计,主要是利用超声波的特点和优势,将超声波测距系统和AT89C51单片机结合于一体,设计出一种基于AT89C51单片机的倒车防撞系统。
该系统采用软、硬件结合的方法,具有模块化和多用化的特点。
论文概述了倒车雷达的发展及基本原理,整个电路采用模块化设计,由主程序、预置子程序、发射子程序、接收子程序、显示子程序等模块组成。
各探头的信号经单片机综合分析处理,实现超声波测距仪的各种功能。
在此基础上设计了系统的总体方案,最后通过硬件和软件实现了各个功能模块。
相关部分附有硬件电路图、程序流程图。
关键字:单片机超声波AT89C51一、引言1、倒车雷达设计的背景至今世界汽车工业经过了近122年的发展,当代汽车已经非常成熟和普遍了。
汽车已经渗透于国防建设、国民经济以及人类生活的各个领域之中,成为人类生存必不可少的、最主要的交通工具,尽管每辆车都有后视镜,但不可避免地都存在一个后视盲区,倒车雷达则可以在一定程度上帮助驾驶员扫除视角死角和视线模糊的缺陷,提高驾驶的安全性,减少剐蹭事件。
本次设计的倒车雷达预警系统主要是针对汽车倒车时人无法目测到车尾与障碍物体的距离而设计开发的。
该系统将微技术与超声波的测距技术、传感器技术等相结合,可检测到汽车倒车中,其障碍物与汽车的距离,通过液晶显示屏显示距离。
2、倒车雷达的发展状况经济的发展和科学技术的进步,推动着交通运输业朝行驶高速化,车流密集化和驾驶非职业化的方向发展。
同时,汽车的生产量和保有量都在急剧增加。
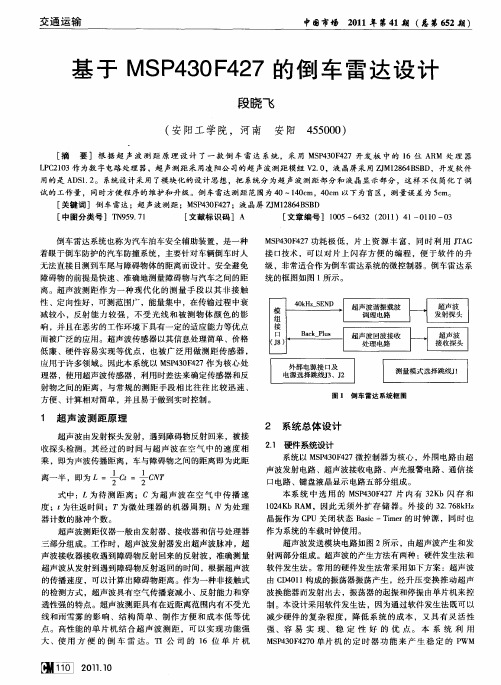
基于MSP430单片机的倒车雷达设计
超声波雷达又称泊车辅助系统,是一种利用超声波原理,由装载于车尾保
险杠上的探头发送超生波撞击障碍物后,反射此声波探头,从而计算出车体与障碍物之间的距离。
倒车雷达主要由三部分组成:
感应器(探头),主机,显示设备。
感应器发出和接收超声波信号,然后将
得到的信号传输到主机里面的电脑进行分析,再通过显示设备显示出来。
随着
人们对汽车驾驶辅助系统易用性要求的提高,以及单片机价格不断下降和汽车
电子系统网络化发展的要求,新型的倒车雷达都是以单片机为核心的智能测距
传感系统。
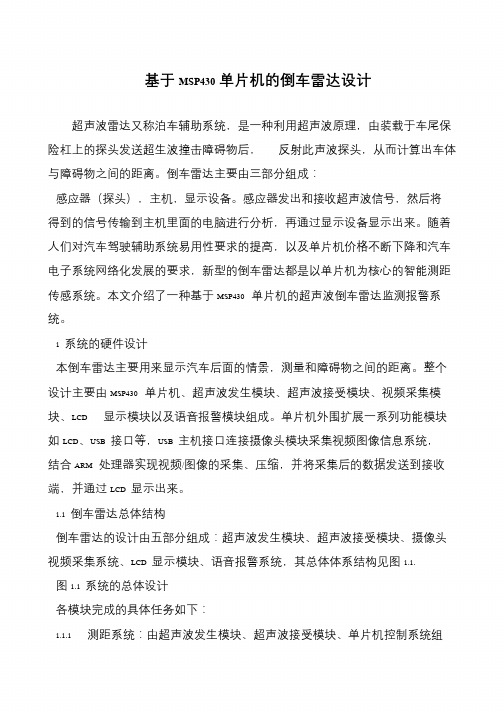
本文介绍了一种基于MSP430 单片机的超声波倒车雷达监测报警系统。
1 系统的硬件设计
本倒车雷达主要用来显示汽车后面的情景,测量和障碍物之间的距离。
整个
设计主要由MSP430 单片机、超声波发生模块、超声波接受模块、视频采集模块、LCD 显示模块以及语音报警模块组成。
单片机外围扩展一系列功能模块如LCD、USB 接口等,USB 主机接口连接摄像头模块采集视频图像信息系统,结合ARM 处理器实现视频/图像的采集、压缩,并将采集后的数据发送到接收端,并通过LCD 显示出来。
1.1 倒车雷达总体结构
倒车雷达的设计由五部分组成:超声波发生模块、超声波接受模块、摄像头
视频采集系统、LCD 显示模块、语音报警系统,其总体体系结构见图1.1.
图1.1 系统的总体设计
各模块完成的具体任务如下:
1.1.1 测距系统:由超声波发生模块、超声波接受模块、单片机控制系统组。

基于MSP430单片机的倒车雷达设计摘要随着我国汽车产业的告诉发展,尤其是近两三年我国开始进入私家车时代,汽车电子产业成了新的增长点,汽车电子产品的高利润和市场广阔性备受商家关注,印象和防盗器就是明证。
近两年来,倒车雷达成了商家的电子新爱,众多生产防盗器的厂家纷纷涉足倒车雷达。
倒车雷达全称为“倒车防撞雷达”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和启动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除视野的死角和视线模糊的缺陷。
本文详细介绍了一种基于MSP430单片机的超声波脉冲测距预警倒车雷达系统。
该系统以空气中超声波的传播速度为确定条件,利用反射超声波测量待测距离。
并且描述了系统研制的理论基础,超声波传感器等部分的电路设计以及使用了性能优良的单片机对系统起到了积极的作用。
论文概述了超声波检测的发展及原理,介绍了超声波传感器的原理以及特性,并且在在此基础上提出了系统的总体构成。
针对测距系统发射、接受、检测、多路控制、显示部分的总体设计方案进行了论证。
关键词:倒车雷达;MSP430单片机;超声波测距。
The Design of Car Parking Sensor Based on MSP430 ChipAbstractWith the development of China's automobile industry to tell, especially in the past two or three years entered the private car of the era, automotive electronics industry has become a new growth point, automobile electronic products and market a broad high-margin business of much attention, impressions, and anti-theft device is proof. The past two years, reversing radar became the new love of electronic business, many manufacturers have produced anti-theft device involved reversing radar.Parking sensor is called "reverse collision avoidance radar," is secure car parking assist device, capable of voice or a more intuitive display of obstacles around the situation told the driver to lift the driver start the vehicle parking and access around, problems arising and to help the driver dead livestock and blurred vision defects.This paper describes the MSP430 microcontroller based ultrasonic pulse ranging reversing early-warning radar system. The system is the propagation velocity of ultrasonic wave in the air to determine the conditions under test using reflected ultrasonic distance measurement. And describes the theoretical basis of system development, ultrasonic sensors and other parts of the circuit design and the use of the excellent performance of the SCM system has played a positive role.Paper outlines the development of ultrasonic testing and the principle, introduced the principle and the characteristics of ultrasonic sensors, and on this basis, the overall composition of the proposed system. Ranging system for launch, receive, test, multiple control, showing part of the overall design were demonstrated.Keywords :reversing radar; MSP430 microcontroller; Ultrasonic Ranging目录摘要 (1)Abstract (2)目录 (3)1. 绪论 (1)1.1 引言 (1)1.2 课题背景及意义 (1)1.3 国内外倒车雷达的发展现状 (2)1.4 倒车雷达的发展趋势 (3)1.5 论文主要研究内容 (4)2. 倒车雷达的相关技术 (5)2.1 超声波介绍 (5)2.2 超声波传感器 (6)2.2.1 超声波传感器结构 (6)2.2.2 工作程式 (8)2.2.3 系统构成 (8)2.3 系统测距原理 (9)3. 系统的硬件设计 (11)3.1 硬件结构 (11)3.2 MSP430单片机 (11)3.3 系统的硬件电路设计 (12)3.3.1 主控制器选择及硬件组成 (12)3.3.2 电源电路 (12)3.3.3 复位电路 (13)3.3.4 时钟电路 (14)3.3.5 存储器电路设计 (15)3.4 超声波换能器电路设计 (16)3.4.1 倒车雷达总体结构 (16)3.4.2 超声波发射信号 (16)3.4.3 超声波接收电路 (17)3.4.4 显示电路与报警提示设计 (18)3.4.5 MSP430单片机介绍 (19)4. 系统软件设计 (21)4.1 软件设计总体思路 (21)4.1.1 总体思路 (21)4.1.2 需要完成的任务 (22)4.2 图像视频的采集与播放 (22)4.2.1 USB摄像头的组成 (22)4.2.2 LCD显示的程序设计 (23)4.3 超声波发射和接受部分软件 (25)5. 总结 (29)参考文献 (32)致谢 (34)1. 绪论1.1 引言超声波雷达又称泊车辅助系统,是一种利用超声波原理,由装载于车尾保险杠上的探头发送超生波撞击障碍物后,反射此声波探头,从而计算出车体与障碍物之间的距离。
基于MSP430单芯片的倒车雷达模块设计环翾;黄舒平【期刊名称】《微计算机信息》【年(卷),期】2012(000)004【摘要】本文介绍了一种单芯片实现的倒车雷达模块设计方案,除驱动电路之外的所有电路功能都通过MSP430F2274来实现:发送的超声波遇障碍物反射,接收的超声波经过滤波、放大、检波等处理后被检测,进行温度补偿从而计算出精准距离:该模块电路简单、成本低、功耗低、测距准确、受温度变化影响小、工作稳定可靠。
%This article introduces a reversing radar module in which, except for the driving circuit, all other circuit functionalities are implemented through a single chip MSP430F2274 micro-controller. The ultrasonic waves sent by the generator are reflected by the obstacles, received by the receiver, filtered, amplified, demodulated, and then measured, converted into accurate distance with temperature compensation. This module is qualified by its simple circuit, low cost and power consumption, accurate distance measurement, low temperature impact, stable and reliable operation.【总页数】3页(P64-65,68)【作者】环翾;黄舒平【作者单位】上海飞乐股份有限公司技术中心,上海200072;上海飞乐股份有限公司技术中心,上海200072【正文语种】中文【中图分类】TP311.52【相关文献】1.基于MSP430单片机的倒车雷达设计 [J], 温济霞;张艳兵2.基于MSP430单片机的倒车雷达设计 [J], 温济霞;张艳兵3.基于MSP430F427的倒车雷达设计 [J], 段晓飞4.基于MSP430单片机的超声波倒车雷达系统设计 [J], 陈希湘;朱嵘涛;王锦莉5.基于MSP430的倒车雷达超声波测距系统设计 [J], 张皎;姚亦桐;杨小平;张博奥因版权原因,仅展示原文概要,查看原文内容请购买。
基于单片机的倒车雷达设计开题报告一、课题背景和意义随着我国经济的飞速发展,交通运输车辆的不断增多,由此产生的交通问题越来越成为人们关注的问题。
其中倒车事故由于发生的频率极高,已引起了社会和交通部门的高度重视。
倒车事故发生的原因是多方面的,倒车镜有死角,驾车者目测距离有误差,视线模糊等原因造成倒车时的事故率远大于汽车前进时的事故率,尤其是非职业驾驶员以及女性更为突出。
而倒车事故给车主带来许多麻烦,例如撞上别人的车、消防水笼头,如果伤及儿童更是不堪设想,有鉴于此,汽车高科技产品家族中,专为汽车倒车泊位设置的“倒车雷达”应运而生,倒车雷达的加装可以解决驾驶人员的后顾之忧,大大降低倒车事故的发生。
汽车倒车雷达全称为“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除驾驶员泊车和起动车辆时因前后左右探视所引起的困扰,并帮助驾驶员克服视野死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达的原理与普通雷达一样,是根据蝙蝠在黑夜里高速飞行而不会与任何障碍物相撞的原理设计开发的。
通过感应装置发出超声波,然后通过反射回来的超声波来判断前方是否有障碍物,以及障碍物的距离、大小、方向、形状等。
只不过由于倒车雷达体积大小及实用性的限制,目前其主要功能仅为判断障碍物与车的距离,并做出提示。
二、课题任务的主要内容此次设计采用超声波测距原理,当汽车与障碍物的距离小于所设定的安全距离时,系统能发出声光报警,并随着距离的不断缩近,报警频率不断提高。
超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。
工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。
三、已具备条件应用电子技术专业的毕业生已完成电子线路、数字电路基础、单片机原理、单片四、设计思路与方案1. 系统模块系统以微控制器AT89C51为核心,外围电路由超声波发射模块、超声波接收模块、声光报警电路、显示模块四部分组成2.系统工作过程驾驶员将手柄转到倒车档后,系统自动启动,超声波发送模块向后发射40kHz的超声波信号,经障碍物反射,由超声波接收模块收集,进行放大和比较,单片机AT89C2051将此信号送入显示模块,同时触发语. 音电路,发出同步语音提示,当与障碍物距离小于1m、0.5m、0.25m时,发出不同的报警声,提醒驾驶员停车。
基于单片机的汽车倒车雷达系统设计毕业设计汽车倒车雷达系统设计是一项常见的毕业设计项目,本文将详细介绍基于单片机的汽车倒车雷达系统设计。
本设计将使用超声波传感器作为倒车雷达的感知器件,并通过单片机来实现信号的处理和显示。
首先,我们需要选择适合的超声波传感器。
超声波传感器是一种常用的非接触式测距传感器,能够准确测量所测物体与传感器之间的距离。
在汽车倒车雷达系统中,我们可以使用多个超声波传感器进行距离测量,以实现对周围环境的全方位感知。
接下来,我们需要选择合适的单片机作为主控制器。
单片机可以通过编程实现对传感器信号的处理和数据的显示。
常用的单片机有STC89C52、AT89C52等,其具有强大的计算和通信功能。
在硬件设计方面,我们需要按照电路图进行电路的连接。
具体而言,我们将超声波传感器连接到单片机的输入端口,以便获取距离数据。
同时,还可以将液晶显示屏和蜂鸣器等外设连接到单片机的输出端口,以实现对距离数据的实时显示和声音提示。
在软件设计方面,我们需要编写相应的程序代码。
主要包括以下几个功能:1.超声波传感器信号采集:通过单片机的输入端口采集超声波传感器的数据。
采集到的数据将通过AD转换进行数字化处理。
2.距离计算与处理:使用适当的算法来计算车辆与障碍物之间的距离。
在实际应用中,可以将距离划分为几个区域,并根据距离的远近发出相应的警告信号。
3.数据显示与提示:将计算得到的距离数据实时显示在液晶显示屏上,并通过蜂鸣器等输出设备来提醒驾驶员注意周围环境变化。
4.系统优化与稳定性:对系统进行调试和优化,确保系统能够正常运行并具有足够的稳定性。
最后,我们需要对设计的汽车倒车雷达系统进行实验验证。
通过在实际场景中进行测试,可以评估系统的性能,并根据测试结果进行调整和改进。
综上所述,基于单片机的汽车倒车雷达系统设计主要包括硬件设计和软件设计两个方面。
通过对超声波传感器信号的采集和处理,以及对距离数据的显示和提示,可以实现对车辆倒车过程中周围环境的全方位感知和安全驾驶的提醒。
毕业设计基于单片机超声波倒车雷达的设计与实现基于单片机的超声波倒车雷达的设计与实现Ranging System Design and Implementation Based On MCU摘要超声波具有指向性强,能量消耗缓慢,传播距离较远等优点,所以,在利用传感器技术和自动控制技术相结合的测距方案中,超声波测距是目前应用最普遍的一种,它广泛应用于防盗、倒车雷达、水位测量、建筑施工工地以及一些工业现场。
本课题详细介绍了超声波传感器的原理和特性,以及Atmel公司的AT89S51单片机的性能和特点,并在分析了超声波测距的原理的基础上,指出了设计测距系统的思路和所需考虑的问题,给出了以AT89S51单片机为核心的低成本、高精度、微型化数字显示超声波测距仪的硬件电路和软件设计方法。
该系统电路设计合理、工作稳定、性能良好、检测速度快、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求。
关键词:超声波;单片机;测距;AT89S51ABSTRACTUltrasonic wave has strong pointing to nature ,slowly energy consumption ,propagating distance farther ,so, in utilizing the scheme of distance finding that sensor technology and automatic control technology combine together ,ultrasonic wave finds range to use the most general one at present ,it applies to guard against theft , move backward the radar , water level measuring , building construction site and some industrial scenes extensively。