PLC梯形图程序设计方法及应用实例分享
- 格式:pdf
- 大小:505.74 KB
- 文档页数:36
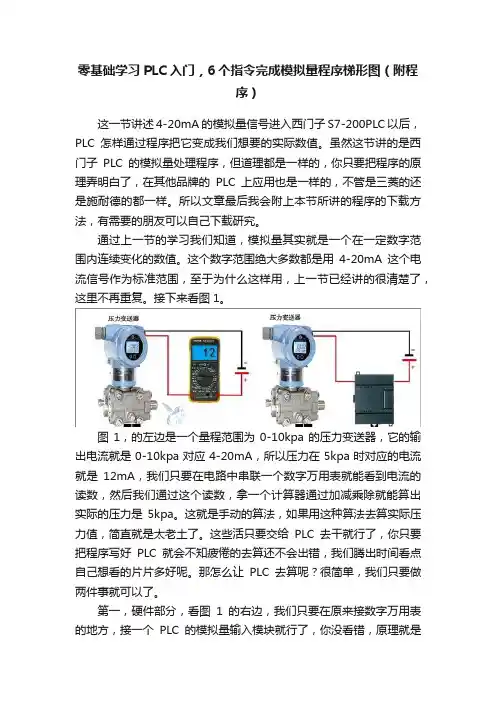
零基础学习PLC入门,6个指令完成模拟量程序梯形图(附程序)这一节讲述4-20mA的模拟量信号进入西门子S7-200PLC以后,PLC怎样通过程序把它变成我们想要的实际数值。
虽然这节讲的是西门子PLC的模拟量处理程序,但道理都是一样的,你只要把程序的原理弄明白了,在其他品牌的PLC上应用也是一样的,不管是三菱的还是施耐德的都一样。
所以文章最后我会附上本节所讲的程序的下载方法,有需要的朋友可以自己下载研究。
通过上一节的学习我们知道,模拟量其实就是一个在一定数字范围内连续变化的数值。
这个数字范围绝大多数都是用4-20mA这个电流信号作为标准范围,至于为什么这样用,上一节已经讲的很清楚了,这里不再重复。
接下来看图1。
图1,的左边是一个量程范围为0-10kpa的压力变送器,它的输出电流就是0-10kpa对应4-20mA,所以压力在5kpa时对应的电流就是12mA,我们只要在电路中串联一个数字万用表就能看到电流的读数,然后我们通过这个读数,拿一个计算器通过加减乘除就能算出实际的压力是5kpa。
这就是手动的算法,如果用这种算法去算实际压力值,简直就是太老土了。
这些活只要交给PLC去干就行了,你只要把程序写好PLC就会不知疲倦的去算还不会出错,我们腾出时间看点自己想看的片片多好呢。
那怎么让PLC去算呢?很简单,我们只要做两件事就可以了。
第一,硬件部分,看图1的右边,我们只要在原来接数字万用表的地方,接一个PLC的模拟量输入模块就行了,你没看错,原理就是这样的。
它实际的接线图就是下面的图2。
在图2我们看到压力变送器和PLC的模拟量模块串联在一起,模拟量模块把接收到的4-20mA电流信号经过处理传送给PLC,这样PLC就能通过程序计算出实际的压力值了。
它的内部处理过程如下。
图3,是模拟量信号在PLC内部的处理过程和工作原理,只要能看明白这张图,我下面讲程序时你就能很容易理解了。
其实模拟量模块内部和压力变送器内部一样,都是有一块电路板。
物业供水系统水泵梯形图控制程序设计与调试摘要供水设备是为解决由于压力不足,无法到达用户用水的高度或流量,而专门研发设计的新型环保节能的专业设备。
基于PLC的物业供水系统能实现这一目的,并且可根据要求编程控制水泵的电机停转来实现用户对水的需求。
原始的物业供水一般为手动控制,很麻烦并且很难实现绝对的保证。
利用可编程控制器可实现供水的自动控制,大大节省了人力资源并且可以实现节能,随时保证用户对水的需求。
同时附带手动控制,即自动手动一体化。
本设计由PLC、四台水泵、压力传感器等组成,系统工作时分手动操作和自动操作,自动操作时首先由传感器把信号传给PLC,再由PLC根据水压的高低信号分析控制四台水泵的工作状态;手动操作时,可以通过各个水泵的启动停止按钮独立的工作。
该系统还设有过载等保护。
本设计是基于PLC的物业供水系统,通过调试表明本系统能够满足设计要求并有很好的使用价值。
关键词:PLC,物业供水,水压,水泵电机目录一、概述1、供水设备的介绍2、可编程控制器(PLC)介绍二硬件设计1、主电路图2、I/O点分配表3、I/O外部接线图4、元件选择三软件设计1、设计要求2、流程图3、梯形图4、指令表5、程序分析四、设计总结五、参考文献一、概述1、供水设备的介绍供水设备是为解决由于压力不足,无法到达用户用水的高度或流量,而专门研发设计的新型环保节能的专业设备。
供水设备一般由水泵机组,变频控制柜,隔膜压力罐,压力传感器和一些辅件构成。
但由于不同的类型,也会使用一些特殊的设备,如:无负压变频供水设备会用到无负压稳流罐;无塔变频供水设备会用到液位传感器由于构成的不同,价格也不近相同。
随着现代化工业设备的自动化应用越来越广泛,基于PLC的物业供水设备种类也越来越多,要求也越来越高。
在现代化生产过程中,为了提高生产效率,降低成本,减低工人的劳动负担,要求整个过程实行全程自动控制。
物业供水就是基于PLC控制系统来自动完成供水任务。
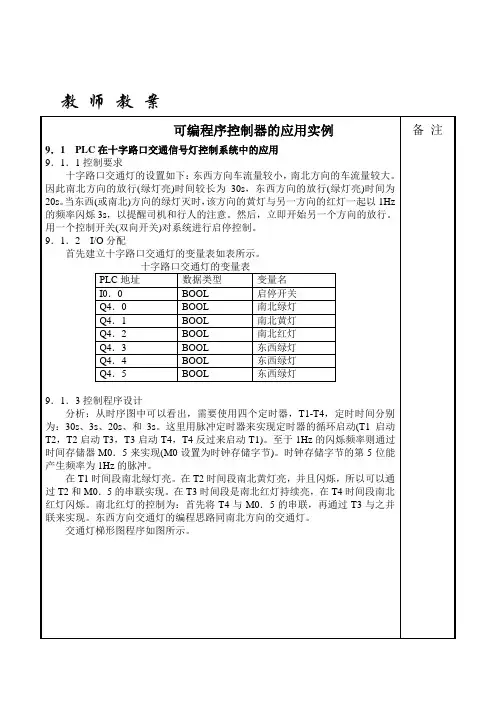
教师教案交通灯梯形图程序9.2 PLC在节日彩灯控制系统中的应用9.2.1控制要求用PLC实现对节日彩灯的控制,结构简单,变幻形式多样、价格低。
彩灯形式及变幻尽管花样繁多,但其负载不外乎三种:长通类负载、变幻类负载及流水类负载。
长通类负载是指彩灯中用以照明或起衬托底色作用之类的负载,其特点是只要彩灯投入工作,则这类负载长期接通。
变幻类负载则指某些在整个工作过程中定时进行花样变换的负载,如字形的变换,色彩的变幻或位置的变幻之类,其特点是定时通断,但频率不高。
流水、闪烁类负载则指变幻速度快,犹如行云流水、星光闪烁、万马奔腾,其特点虽也是定时通断,但频率较高(通常间隔几十毫秒至几百毫秒)。
对于长通类负载,其控制十分简单,只需一次接通或断开。
而对变幻类及流水、闪烁类负载的控制,则是按预定节拍产生一个“环形分配器”(一般可用SHRB、ROL-W产生),有了环形分配器,彩灯就能得到预设频率和预设花样的闪亮信号。
彩灯就可实现花样的变幻。
通常先根据花样变幻的规律例出动作时序表,再按预设彩灯变幻花样在表中“打点”,然后再依据动作时序表输出即可。
9.2.1控制程序设计本例所选彩灯变幻花样为跳闪方式:1隔1跳2,回跳1,隔1跳2,回跳1┈。
其动作时序表如表所示。
节日彩灯动作时序表即本例的节拍是16位,输出是8位,环形分配器由ROL-W产生彩灯闪烁频率固定为1Hz,如果需要现场改变频率,则T33的PT端需采用VWZ写入。
节日彩灯控制的梯形图如图所示。
节日彩灯控制的梯形图9.3 PLC在自动送料车控制系统中的应用9.3.1控制要求如图所示,当小车处于后端时,按下起动按钮,小车向前运行,行至前端压下前限位开关,翻斗门打开装货,7s后,关闭翻斗门,小车向后运行,行至后端,压下后限位开关,打开小车底门卸货,5s后底门关闭,完成一次动作。
要求控制送料小车的运行,并具有以下几种运行方式:1)手动操作:用各自的控制按钮,一一对应地接通或断开各负载的工作方式。
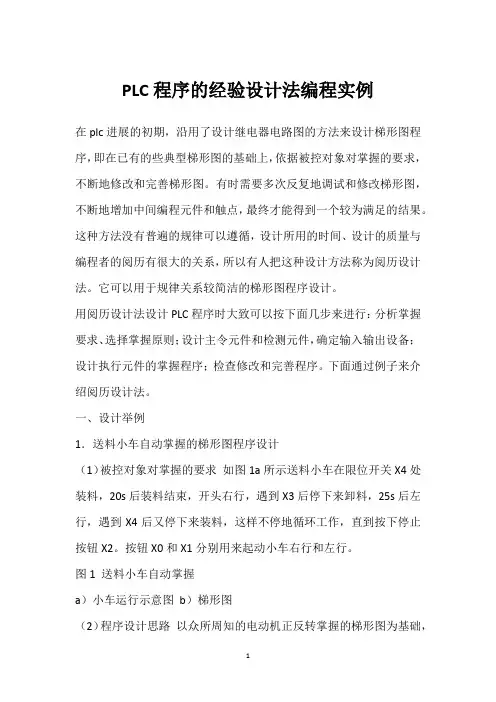
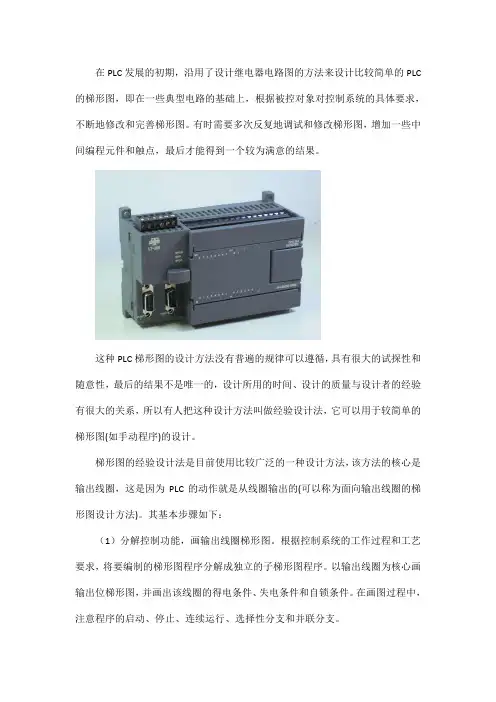
PLC程序的经验设计法编程实例在plc进展的初期,沿用了设计继电器电路图的方法来设计梯形图程序,即在已有的些典型梯形图的基础上,依据被控对象对掌握的要求,不断地修改和完善梯形图。
有时需要多次反复地调试和修改梯形图,不断地增加中间编程元件和触点,最终才能得到一个较为满足的结果。
这种方法没有普遍的规律可以遵循,设计所用的时间、设计的质量与编程者的阅历有很大的关系,所以有人把这种设计方法称为阅历设计法。
它可以用于规律关系较简洁的梯形图程序设计。
用阅历设计法设计PLC程序时大致可以按下面几步来进行:分析掌握要求、选择掌握原则;设计主令元件和检测元件,确定输入输出设备;设计执行元件的掌握程序;检查修改和完善程序。
下面通过例子来介绍阅历设计法。
一、设计举例1.送料小车自动掌握的梯形图程序设计(1)被控对象对掌握的要求如图1a所示送料小车在限位开关X4处装料,20s后装料结束,开头右行,遇到X3后停下来卸料,25s后左行,遇到X4后又停下来装料,这样不停地循环工作,直到按下停止按钮X2。
按钮X0和X1分别用来起动小车右行和左行。
图1 送料小车自动掌握a)小车运行示意图b)梯形图(2)程序设计思路以众所周知的电动机正反转掌握的梯形图为基础,设计出的小车掌握梯形图如图1b所示。
为使小车自动停止,将X3和X4的常闭触点分别与Y0和Y1的线圈串联。
为使小车自动起动,将掌握装、卸料延时的定时器T0和T1的常开触点,分别与手动起动右行和左行的X0、X1的常开触点并联,并用两个限位开关对应的X4和X3的常开触点分别接通装料、卸料电磁阀和相应的定时器。
(3)程序分析设小车在起动时是空车,按下左行起动按钮X1,Y1得电,小车开头左行,遇到左限位开关时,X4的常闭触点断开,使Y1失电,小车停止左行。
X4的常开触点接通,使Y2和T0的线圈得电,开头装料和延时。
20s后T0的常开触点闭合,使Y0得电,小车右行。
小车离开左限位开关后,X4变为“0”状态,Y2和T0的线圈失电,停止装料,T0被复位。
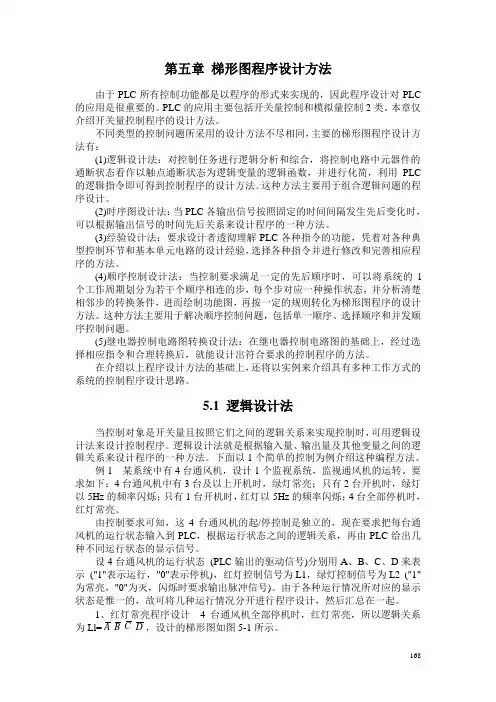
第五章梯形图程序设计方法由于PLC所有控制功能都是以程序的形式来实现的,因此程序设计对PLC 的应用是很重要的。
PLC的应用主要包括开关量控制和模拟量控制2类。
本章仅介绍开关量控制程序的设计方法。
不同类型的控制问题所采用的设计方法不尽相同,主要的梯形图程序设计方法有:(1)逻辑设计法:对控制任务进行逻辑分析和综合,将控制电路中元器件的通断状态看作以触点通断状态为逻辑变量的逻辑函数,并进行化简,利用PLC 的逻辑指令即可得到控制程序的设计方法。
这种方法主要用于组合逻辑问题的程序设计。
(2)时序图设计法:当PLC各输出信号按照固定的时间间隔发生先后变化时,可以根据输出信号的时间先后关系来设计程序的一种方法。
(3)经验设计法:要求设计者透彻理解PLC各种指令的功能,凭着对各种典型控制环节和基本单元电路的设计经验,选择各种指令并进行修改和完善相应程序的方法。
(4)顺序控制设计法:当控制要求满足一定的先后顺序时,可以将系统的l 个工作周期划分为若干个顺序相连的步,每个步对应一种操作状态,并分析清楚相邻步的转换条件,进而绘制功能图,再按一定的规则转化为梯形图程序的设计方法。
这种方法主要用于解决顺序控制问题,包括单一顺序、选择顺序和并发顺序控制问题。
(5)继电器控制电路图转换设计法:在继电器控制电路图的基础上,经过选择相应指令和合理转换后,就能设计出符合要求的控制程序的方法。
在介绍以上程序设计方法的基础上,还将以实例来介绍具有多种工作方式的系统的控制程序设计思路。
5.1 逻辑设计法当控制对象是开关量且按照它们之间的逻辑关系来实现控制时,可用逻辑设计法来设计控制程序。
逻辑设计法就是根据输入量、输出量及其他变量之间的逻辑关系来设计程序的一种方法。
下面以1个简单的控制为例介绍这种编程方法。
例1 某系统中有4台通风机,设计1个监视系统,监视通风机的运转。
要求如下:4台通风机中有3台及以上开机时,绿灯常亮;只有2台开机时,绿灯以5Hz的频率闪烁;只有1台开机时,红灯以5Hz的频率闪烁;4台全部停机时,红灯常亮。
在PLC发展的初期,沿用了设计继电器电路图的方法来设计比较简单的PLC 的梯形图,即在一些典型电路的基础上,根据被控对象对控制系统的具体要求,不断地修改和完善梯形图。
有时需要多次反复地调试和修改梯形图,增加一些中间编程元件和触点,最后才能得到一个较为满意的结果。
这种PLC梯形图的设计方法没有普遍的规律可以遵循,具有很大的试探性和随意性,最后的结果不是唯一的,设计所用的时间、设计的质量与设计者的经验有很大的关系,所以有人把这种设计方法叫做经验设计法,它可以用于较简单的梯形图(如手动程序)的设计。
梯形图的经验设计法是目前使用比较广泛的一种设计方法,该方法的核心是输出线圈,这是因为PLC的动作就是从线圈输出的(可以称为面向输出线圈的梯形图设计方法)。
其基本步骤如下:(1)分解控制功能,画输出线圈梯形图。
根据控制系统的工作过程和工艺要求,将要编制的梯形图程序分解成独立的子梯形图程序。
以输出线圈为核心画输出位梯形图,并画出该线圈的得电条件、失电条件和自锁条件。
在画图过程中,注意程序的启动、停止、连续运行、选择性分支和并联分支。
(2)建立辅助位梯梯形图。
如果不能直接使用输入条件逻辑组合作为输出线圈的得电和失电条件,则需要使用工作位、定时器或计数器以及功能指令的执行结果作为条件,建立输出线圈的得电和失电条件。
(3)画出互锁条件和保护条件。
互锁条件是可以避免同时发生互相冲突的动作,保护条件可以在系统出现异常时,使输出线圈动作,保护控制系统和生产过程。
在设计梯形图程序时,要注意先画基本梯形图程序,当基本梯形图程序的功能能够病足要求后,再增加其他功能,在使用输入条件时,注意输入条件是电平、脉冲还是边沿。
调试时要将梯形图分解成小功能块调试完毕后,再调试全部功能。
经验设计法具有设计速度快等优点,但是,在设计问题变得复杂时,难免会出现设计漏洞。
下面介绍两个程序设计实例。
例:运货小车的自动控制1.运货小车的动作过程图1运货小车在限位开关SQ0装料(见图1)10s后,装料结束。
福课程设计课程名称:《可编程控制器原理及应用教程》题目:饮料罐装生产流水线PLC梯形图控制程序设计与调试电力职业技术学院 (1)课程设计 (1)引言 (2)1.设计任务 (2)1.1课题容 (2)1.2控制要求 (2)1.3 课题要求 (3)2. 总体设计方案 (3)2.1饮料灌装流水线的基本结构 (3)2.2灌装流水线的工作原理 (3)3. 硬件控制设计 (4)3.1 PLC的选择 (4)3.2传感器的选择. (5)3.3硬件电路的设计 (5)4. 软件控制设计 (6)4.1系统流程图 (6)4.2 I/O接线图 (7)4.3 I/O分配表 (7)4.4梯形图 (8)4.5指令表 (9)5. 调试说明 (11)6.设计小结 (11)参考文献 (12)引言目前,饮料的灌装生产已经实现自动化,为了提高产品质量,缩短生产周期,适应产品迅速更新换代的要求,产品生产正向缩短生产周期、降低成本、提高生产质量等方面发展。
因此,饮料厂的自动化灌装生产线中有越来越多的机器在使用先进的灌装技术来提高机器的自动化控制水平和生产效率。
而应用PLC完成电气部分的控制是工业自动化电气控制的主要发展方向。
本次课设主要介绍全自动灌装生产线的基本概念。
全自动灌装生产线是由数台自动灌装机械经控制系统进行集中控制,并按照各自功能完成一定任务进行顺序、连续生产的一系列机器组合。
通过对饮料罐装自动控制的介绍,使我们对灌装这个行业有了更深的了解,也对自动化这个名词有了进一步的了解。
我国的饮料罐装自动化相对于西方发达国家来讲还有很大的差距。
设备旧,技术落后,成为阻碍我们灌装行业发展的一个严重问题。
鉴于这些问题,我国企业不断发展自身的实力,逐步朝着生产高速化、设备结构合理化、设备的多功能化、设备的绿色化、控制的智能化等方向发展。
推出适合自己需求的产品来。
本次课设就是朝着这个方向进行研究和设计。
1.设计任务1.1课题容饮料灌装生产流水线PLC梯形图控制程序设计和调试1.2控制要求(1)统通过开关设定为自动操作模式,一旦启动,则传送带的驱动电机启动并一直保持到停止开关动作或罐装设备下的传感器检测到一个瓶子时停止;瓶子装满饮料后,传送带驱动电机必须自动启动,并保持到又检测到一个瓶子或停止开关动作。
用“经验设计法”编写PLC 梯形图程序宁波技师学院电气系王柏华一、经验设计法简介梯形图程序设计是可编程控制器应用中最关键的问题,PLC 梯形图程序设计常用方法有: 经验设计法、顺序控制设计法和逻辑代数设计法等。
PLC 梯形图程序用“经验设计法”编写, 是沿用了设计继电器电路图的方法来设计梯形图, 即在某些典型电路的基础上, 根据被控对象对控制系统的具体要求, 不断地修改和完善梯形图。
有时需要多次反复地进行调试和修改梯形图, 不断地增加中间编程元件和辅助触点, 最后才能得到一个较为满意的结果。
因此, 所谓的经验设计法是指利用已经的经验( 一些典型的控制程序、控制方法等), 对其进行重新组合或改造, 再经过多次反复修改, 最终得出符合要求的控制程序。
这种设计方法没有普遍的规律可以遵循, 具有很大的试探性和随意性, 最后的结果也不是唯一的, 设计所用的时间、设计质量与设计者的经验有很大的关系, 因此有人就称这种设计方法为经验设计法, 它是其他设计方法的基础, 用于较简单的梯形图程序设计。
用经验设计法编程, 可归纳为以下四个步骤:(1) 控制模块划分( 工艺分析) 。
在准确了解控制要求后, 合理地对控制系统中的事件进行划分, 得出控制要求有几个模块组成、每个模块要实现什么功能、因果关系如何、模块与模块之间怎样联络等内容。
划分时, 一般可将一个功能作为一个模块来处理, 也就是说, 一个模块完成一个功能。
(2) 功能及端口定义。
对控制系统中的主令元件和执行元件进行功能定义、代号定义与I/O 口的定义( 分配), 画出I/O 接线图。
对于一些要用到的内部元件, 也要进行定义, 以方便后期的程序设计。
在进行定义时, 可用资源分配表的形式来进行合理安排元器件。
(3) 功能模块梯形图程序设计。
根据已划分的功能模块, 进行梯形图程序的设计, 一个模块, 对应一个程序。
这一阶段的工作关键是找到一些能实现模块功能的典型的控制程序, 对这些控制程序进行比较, 选择最佳的控制程序( 方案选优), 并进行一定的修改补充, 使其能实现所需功能。
电气可编程控制原理与应用(PLC)的实验报告实验人员:陶建美日期:2011年6月21日实验项目:电梯控制报告框架(Ctrl+点击该链接,即可转入相应模块)一、实验目的与要求二、实验设备三、实验内容四、实验过程1、电梯的基本构造2、PLC的基本结构3、PLC的工作原理4、电梯控制构成5、输入输出(I/O)端口功能分配表6、程序执行流程图7、梯形图(1)定时器T0 (2)一楼的控制(3)二楼的控制(4)三楼的控制(5)四楼的控制(6)确定电梯楼层位置(7)电梯趋势确定(8)电梯上行程序(9)电梯下行程序8、指令表五、问题与解决方案六、实验总结与心得体会电气可编程控制原理与应用(PLC)的实验报告电梯控制一、实验目的与要求1、运用所学基本理论、基本知识和基本技能,分析与解决实际问题的能力,通过设计掌握控制PLC控制系统的基本设计方法和应用。
2、设计出一个四层楼电梯控制。
3、完成并实现实验内容的基本功能要求。
二、实验设备计算机、PLC可编程控制器、FXGPWIN应用软件三、实验内容1、四层楼电梯基本设计2、停止有刹车及保险止降装置3、根据楼层请求上下,先来优先4、请求与趋势同优先5、楼内可以撤销楼内请求四、实验过程1、电梯的基本构造电梯是一种特殊的起重运输设备,由桥厢及配重、拖动机及减速传动机械、井道及井道设备、召唤系统及安全装置构成。
桥厢是载人或装货的部位,配重是为了改变电梯电机负载的特性以提高电梯安全性而设置的。
下图是电梯拖动系统示意图,图中可见电梯的桥厢及配重分系在钢丝绳的两端,钢丝绳跨挂在曳引轮上,曳引轮经减速机构由电机拖动,形成桥厢的上下运动。
2、PLC的基本结构从结构上分,PLC分为固定式和组合式(模块式)两种。
固定式PLC包括CPU板、I\O板、内存板、电源等,这些元素组成一个不可拆卸的整体。
模块式PLC包括CPC模块、I\O模块、电源模块、地板或支架,这些模块可以按照一定规则组合配置。
3、PLC的工作原理当PLC投入运行后,其工作过程一般分为三个阶段,即输入采样、用户程序执行和输出刷新三个阶段。
PID温度控制的PLC程序设计(梯形图语言)PID温度控制的PLC程序设计温度控制是许多机器的重要的构成部分。
它的功能是将温度控制在所需要的温度范围内,然后进行工件的加工与处理。
PID控制系统是得到广泛应用的控制方法之一。
在本文中,将详细讲叙本套系统。
l 系统组成本套系统采用Omron的PLC与其温控单元以及Pro-face的触摸屏所组成。
系统包括CQM1H-51、扩展单元TC-101、GP577R以及探温器、加热/制冷单元。
l 触摸屏画面部分(见图1-a)1-a如图所见,数据监控栏内所显示的002代表现在的温度,而102表示输出的温度。
如按下开始设置就可设置参数。
需要设置的参数有六个,分别是比例带、积分时间、微分时间、滞后值、控制周期、偏移量。
它们在PLC的地址与一些开关的地址如下所列。
比例带: DM51积分时间: DM52微分时间: DM53滞后值: DM54控制周期: DM55偏移量: DM56数据刷新: 22905l PLC程序部分002:PID的输入字102:PID的输出字[NETWORK]Name="Action Check" //常规检查[STATEMENTLIST]LD 253.13 //常ONOUT TR0CMP 002 #FFFF //确定温控单元是否完成初始化字串1AND NOT 255.06 //等于OUT 041.15 //初始化完成LD TR0AND 041.15OUT TR1AND NOT 040.10 //不在参数设置状态MOV DM0050 102 //将设置温度DM50传送给PID输出字LD TR1MOV 002 DM0057 //将002传送到DM57[NETWORK]Name="Setting Start"//设置开始[STATEMENTLIST]LD 253.13OUT TR0AND 229.05 //触摸屏上的开始设置开关DIFU 080.05 //设置微分LD TR0AND 041.15AND 080.05SET 040.01 //开始设置标志位1SET 040.10 //开始设置标志位2[NETWORK]Name="Poportion"//比例带设置[STATEMENTLIST]LD 040.01OUT TR0AND NOT 042.01MOV #C110 102 //读输出边与输入边的比例带CMP 002 #C110 //比较输入字是否变成C110AND 255.06 //等于SET 042.01 //设置比例带标志LD TR0AND 042.01MOV DM0051 102 //将比例带的设定值写入输出字CMP 002 DM0051 //是否写入AND 255.06 字串4RSET 040.01 //复位标志1RSET 042.01 //复位比例带标志SET 040.02 //向下继续设置标志[NETWORK]Name="Integral"//积分时间设置[STATEMENTLIST]LD 040.02OUT TR0AND NOT 042.02MOV #C220 102 //读输出边与输入边的积分CMP 002 #C220 //比较输入字是否变成C220AND 255.06SET 042.02 //设置积分标志LD TR0AND 042.02MOV DM0052 102 //将积分的设定值写入输出字CMP 002 DM0052 //是否写入AND 255.06RSET 040.02RSET 042.02SET 040.03 //向下继续设置标志[NETWORK]Name="differential"//微分时间设置[STATEMENTLIST]LD 040.03OUT TR0AND NOT 042.03MOV #C330 102 //读输出边与输入边的微分CMP 002 #C330 //比较输入字是否变成C330 AND 255.06SET 042.03 //设置微分标志LD TR0AND 042.03MOV DM0053 102 /将微分的设定值写入输出字CMP 002 DM0053 //是否写入字串3AND 255.06RSET 040.03RSET 042.03SET 040.04 //向下继续设置标志[NETWORK]Name="Hysteresis"//滞后值设置[STATEMENTLIST]LD 040.04OUT TR0AND NOT 042.04MOV #C440 102 //读输出边与输入边的滞后值CMP 002 #C440 //比较输入字是否变成C440 AND 255.06SET 042.04 设置滞后值标志LD TR0AND 042.04MOV DM0054 102 /将滞后值的设定值写入输出字CMP 002 DM0054 //是否写入AND 255.06RSET 040.04RSET 042.04SET 040.05 //向下继续设置标志[NETWORK]Name="Period"//控制周期设置[STATEMENTLIST]LD 040.05OUT TR0AND NOT 042.05MOV #C550 102 //读输出边与输入边的控制周期CMP 002 #C550 //比较输入字是否变成C550AND 255.06SET 042.05 //设置控制周期标志LD TR0AND 042.05MOV DM0055 102 将控制周期的设定值写入输出字CMP 002 DM0055 是否写入AND 255.06RSET 040.05RSET 042.05SET 040.06 //向下继续设置标志[NETWORK]Name="Shift"//偏移量设置[STATEMENTLIST]LD 040.06OUT TR0AND NOT 042.06MOV #C660 102 //读输出边与输入边的偏移量CMP 002 #C660 //比较输入字是否变成C660AND 255.06SET 042.06 //设置偏移量标志LD TR0AND 042.06MOV DM0056 102 //将偏移量的设定值写入输出字CMP 002 DM0056 //是否写入AND 255.06RSET 040.06RSET 042.06SET 040.00[NETWORK]Name="Return"//返回[STATEMENTLIST]LD 040.00OUT TR0AND NOT 042.00MOV #C070 102 //读输入边的处理值CMP 002 #C070 比较输入字变成C070AND 255.06SET 042.00 //返回标志LD TR0AND 042.00MOV DM0050 102 将设定温度值写入输出字RSET 040.00RSET 042.00RSET 040.10以上是本套系统的全部内容,经过反复试验,此系统可以维持温度在1°C之间变化。