激光干涉测长
- 格式:doc
- 大小:1.92 MB
- 文档页数:15
激光干涉测长的基本原理
激光干涉测长是一种非接触式测量方法,其基本原理如下:
1. 使用激光器产生一束单色、相干、窄束的激光。
2. 将激光分为两束,分别称为参考光和测量光。
参考光经过一个反射镜反射,与测量光相向而行。
3. 测量光照射到被测对象上,经过反射后再次与参考光相遇。
4. 参考光和测量光在相遇的地方形成干涉条纹。
这是因为两束光波相干叠加时,会出现干涉现象。
5. 干涉条纹的形态和幅度受到测量光程的影响。
测量光程是测量光从激光器出射到被测对象反射回来的总路程,包括参考光程和被测对象的光程。
6. 通过观察干涉条纹的形态和移动的情况,可以确定测量光程变化的大小,从而计算出被测对象的长度或距离。
激光干涉测长具有高精度、高分辨率、快速响应等特点,广泛应用于工业制造、科学研究、精密测量等领域。

激光测长的原理及应用1. 引言激光测长是一种非接触式测量方法,通过利用激光束与测量对象之间的相互作用,实现测量目标的长度、距离或位移。
本文将介绍激光测长的原理以及其在各个领域的应用。
2. 原理激光测长的原理基于光的干涉和散射效应。
当一束激光照射在目标上时,部分光会被目标表面散射,并返回到激光发射器。
利用光的干涉原理,我们可以测量出光束在发射和接收之间的相位差,从而得出目标的长度、距离或位移。
3. 应用激光测长在许多领域都有广泛的应用,下面列举了几个典型的应用场景:3.1 工业自动化激光测长在工业自动化中被广泛应用于长度、宽度和位置的测量。
例如,在生产线上,激光测长可以用于测量产品的尺寸,确保产品符合规定的标准。
此外,在机器人操作中,激光测长也可以用于测量机器人末端执行器的位移,以实现精准的操作。
3.2 航天航空激光测长在航天航空领域具有重要的应用价值。
例如,在航天器的发射过程中,激光测长可以用于测量航天器与发射台之间的间距。
此外,在飞行器的导航和定位过程中,激光测长也可以用于测量与地面或其他物体的距离,提供精确的定位信息。
3.3 医学影像激光测长在医学影像领域有着广泛的应用。
例如,在眼科手术中,激光测长可以用于测量患者眼球的曲率半径,帮助医生选择合适的人工晶体。
此外,激光测长还可以用于检测体内器官的大小和形状,提供重要的医学诊断依据。
3.4 地质勘探激光测长在地质勘探领域也有广泛的应用。
例如,在地震勘探中,激光测长可以用于测量地震波传播的时间和距离,帮助科学家确定地下地质结构。
此外,在矿山勘探中,激光测长还可以用于测量矿石的厚度和位置,提供宝贵的矿藏信息。
3.5 建筑测量激光测长在建筑测量领域被广泛应用于定位、测量和绘制。
例如,在建筑施工中,激光测长可以用于测量地面的高度差,帮助工程师进行精确的设计和施工。
此外,在建筑勘测中,激光测长还可以用于测量建筑物的墙面、屋顶和地基等尺寸,提供准确的测量数据。
第三章、激光干涉测量干涉测量技术是以光波干涉原理为基础进行高精密测量的一门技术。
20世纪60年代激光的出现,才使干涉测量技术得到了长足的发展。
因为激光出现以前,所用以光源单色灯经过滤光片滤光作为单色光源,其相干长度只有几mm ,且干涉条纹比较模糊,只能微小变化的测量。
激光的出现,由于激光束的高亮度和很长的相干长度(He-Ne 激光器,相干长度几十Km ),使得干涉测量的测量精度、可测量长度都有了质的提高。
激光干涉测量的应用范围很广,可用于长度、位移、角度、形状、介质折射率(通过折射率的变化还可以测量压力、温度等)变化。
激光干涉测量的原理就是将入射激光束分成两束,一束为参考光束,一束为测量光束,测量两束光的光程差的信息或n l kl n l n M j j j N i i i ⇒=-=∆∑∑==211λ。
本章主要介绍激光干涉长度测量、激光干涉微小间隙测量以及光纤干涉传感器所构成的温度、压力测量。
首先介绍激光干涉长度测量。
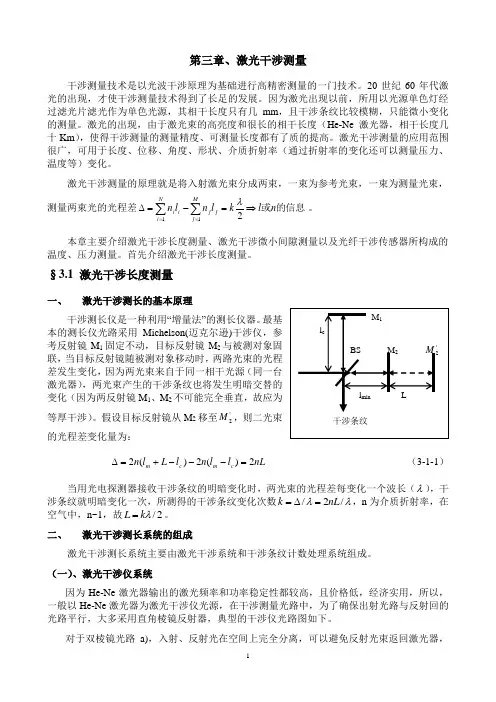
§3.1 激光干涉长度测量一、 激光干涉测长的基本原理干涉测长仪是一种利用“增量法”的测长仪器。
最基本的测长仪光路采用Michelson(迈克尔逊)干涉仪,参考反射镜M 1固定不动,目标反射镜M 2与被测对象固联,当目标反射镜随被测对象移动时,两路光束的光程差发生变化,因为两光束来自于同一相干光源(同一台激光器),两光束产生的干涉条纹也将发生明暗交替的变化(因为两反射镜M 1、M 2不可能完全垂直,故应为等厚干涉)。
假设目标反射镜从M 2移至'2M ,则二光束的光程差变化量为:nL l l n l L l n c m c m 2)(2)(2=---+=∆ (3-1-1) 当用光电探测器接收干涉条纹的明暗变化时,两光束的光程差每变化一个波长(λ),干涉条纹就明暗变化一次,所测得的干涉条纹变化次数λλ/2/nL k =∆=,n 为介质折射率,在空气中,n~1,故2/λk L =。
激光在长度计量中的应用摘要:随着时代的发展与科学技术水平的提高,激光技术取得了很大程度的发展,在各个领域都有了较为广泛的应用,长度计量便是激光技术应用的重要表现之一。
近年来,电子技术与计算机技术的发展,又将激光技术在长度计量中的应用提升到一个新的层次。
相比于传统的测量方法,激光测量具有高灵敏度、高精度、现代化的特点,优势明显,为我国工业水平的提升做出一定贡献。
本文就针对激光在长度计量中的应用进行研究与分析。
关键词:激光技术;长度计量;干涉测长;位移测量;应用1.激光干涉测长的原理对于激光干涉测长技术而言,它是通过干涉条纹来对被测信息进行一定程度的反映。
以迈克尔逊干涉仪为例,干涉条纹指的是一条轨迹,这一轨迹是仪器接收面上光程差相同的点相连而成。
激光器发出光束,在到达半透半反射镜之后,原先的光束被一分为二。
在行进过程之中,如果两道光束的光程相差激光半波长的偶数倍,它们之间会构成一个互相加强的关系,条纹为亮条纹;而如果是奇数倍时,它们只见的关系又会变成相互抵消,进而形成暗条纹。
两条光束的光程差可用如下公式表示:在上述公式中,n指的是光路介质折射率;l指的是光路的几何路程。
运用干涉仪测量物体时,把对象物体与其中一支光路相连,然后移动反光镜,时期保持与光束移动方向一致。
在这一过程中,反光镜每移动半波长,相应光束的光程便改变了一个波长,这样一来,干涉条纹会随之发生明暗变化,且变化过程是周期性的。
上述操作完成之后,就可以对干涉条纹的变化进行测量,进而得到所需的长度参数。
测量基本方程为:在这一基本方程中,L指的是被测长度;N指的是干涉条纹变化次数;指的是光源波长。
获得长度参数后,还需要进行进行误差分析。
公式为这一公式又可以被记作:这一公式中,为被测长度的相对误差;为干涉条纹变化计数的相对误差;为波长相对误差。
也就是说,被测长度的相对误差主要是由干涉条纹计数与波长的相对误差两部分组成。
对于干涉条纹计数相对误差而言,它一般来自于系统设计方面的问题;而造成波长相对误差的原因有很多,一方面来自于激光稳频技术,另一方面则会受到湿度、温度、气压等外部环境的控制情况影响。
使用激光干涉仪进行长度测量的技巧与注意事项激光干涉仪是一种常用的精密测量设备,广泛应用于科技研究、工程测量和制造领域。
它通过使用激光干涉原理,可以实现高精度的长度测量。
然而,使用激光干涉仪进行测量并非易事,需要掌握一些技巧和注意事项。
本文将介绍一些常用的技巧与注意事项,以帮助读者正确地使用激光干涉仪进行长度测量。
首先,在使用激光干涉仪进行测量前,要确保仪器处于良好的工作状态。
检查激光源是否正常工作,激光束是否稳定,以及干涉信号是否清晰。
如果有异常情况,需要及时修复或更换设备。
此外,应在使用过程中避免仪器受到撞击和振动,以免影响测量结果的精确性。
其次,在进行测量时,要注意调节测量系统的各项参数。
首先,要调整光源的功率和聚焦距离,使激光束能够精确照射到被测物体上。
然后,根据被测物体的特点选择合适的测量范围和放大倍数,以确保干涉信号的清晰可见。
此外,还需要调整干涉仪的分束板和叠加板,使干涉图样对称清晰,以便准确地读取测量结果。
在进行测量时,还需要注意环境因素对测量结果的影响。
激光干涉仪对温度和空气流动比较敏感,因此应尽量在稳定的温度条件下进行测量,并避免有风的地方。
此外,需要注意避免干扰源的存在,如强光和电磁场等,因为这些干扰源可能会导致干涉信号的变化,从而影响测量的准确性。
另外,为了获得更准确的测量结果,可以采取一些提高精度的措施。
首先,测量前应对被测物体进行清洁,以避免因灰尘或污渍对测量结果产生误差。
其次,可以采用多点测量的方法,将多个测量值取平均,以降低随机误差的影响。
此外,可以通过对比和校准的方式,确定测量系统的零点,从而提高测量的绝对精度。
最后,使用激光干涉仪进行测量时,要注意数据的处理和分析。
首先,要合理选择数据采集的频率和时间间隔,以充分反映被测物体的变化情况。
其次,对于连续变化的信号,可以进行插值或拟合处理,以获得更精确的测量结果。
最后,要注意对测量结果进行误差分析,评估测量的精确性和可靠性,并及时修正和改进测量的方法和装置。
多波长半导体激光干涉仪长度测量和应用多波长半导体激光干涉仪(Multiple Wavelength Semiconductor Laser Interferometer, MWL-IF)是一种基于激光干涉原理的长度测量工具,广泛应用于科研、制造业等领域。
本文将探讨多波长半导体激光干涉仪的原理、测量方法以及其在实际应用中的优势。
多波长半导体激光干涉仪利用不同波长的激光进行干涉测量,通过测量干涉光的相位差,从而确定被测物体的长度。
与传统的单波长激光干涉仪相比,多波长半导体激光干涉仪具有更高的测量精度和更宽的测量范围。
多波长半导体激光干涉仪的工作原理是利用不同波长的激光在空间中产生干涉,形成一系列的干涉条纹。
通过测量干涉条纹的位移,可以计算出被测物体的长度。
多波长激光源可以通过改变电流或温度来实现波长的切换,从而得到不同波长的激光。
在测量过程中,多波长半导体激光干涉仪需要进行相位差的测量。
常用的方法有相位移法、相位计数法等。
相位移法是通过改变干涉光程的长度,使干涉条纹发生位移,从而测量出相位差。
相位计数法则是通过计算干涉光的相位变化来确定相位差的大小。
多波长半导体激光干涉仪在实际应用中具有许多优势。
首先,多波长激光源可以提供更高的测量精度,因为不同波长的激光在空间中具有不同的干涉条纹密度,可以提高测量的分辨率。
其次,多波长激光干涉仪具有更宽的测量范围,可以测量大范围内的长度变化。
此外,多波长激光干涉仪还可以实现非接触式测量,减少了对被测物体的损伤。
多波长半导体激光干涉仪在制造业中有着广泛的应用。
例如,在半导体芯片制造过程中,多波长激光干涉仪可以用于测量芯片的厚度和平整度,保证芯片的质量。
在微纳加工领域,多波长激光干涉仪可以用于测量微小结构的尺寸,提高加工的精度。
此外,多波长激光干涉仪还可以应用于光学元件的制造和检测、光纤通信的测量等领域。
多波长半导体激光干涉仪是一种高精度、宽范围的长度测量工具,具有广泛的应用前景。
激光尺原理
激光尺原理是利用激光干涉测量的一种高精度长度测量仪器。
激光尺主要由激光发射器、角反射镜和探测器三个部分组成。
激光尺的原理基于激光干涉测量技术,其中激光发射器发射出一束激光经过角反射镜反射后被探测器接收。
激光发射器产生的激光是单色、单向且相干的光线,因此可以形成干涉条纹。
角反射镜是一个具有高度精密表面的镜子,可以将激光完全反射,并且不改变激光的波长和束流方向。
探测器用于接收反射回来的激光,并将其转换为电信号。
在激光尺工作时,激光发射器将激光束射向角反射镜,在角反射镜表面产生一个干涉点,即反射点。
当目标表面距离角反射镜不同时,反射点位置也会发生改变。
干涉点的位置变化会引起激光信号的相位差发生变化。
探测器接收到反射激光信号后,通过光电转换将其转换为电信号,并经过一系列信号处理后得到测量结果。
激光尺的测量原理可以通过下面的公式表示:
L = λ(N + φ/2π)
其中,L是目标表面到角反射镜的距离,λ是激光的波长,N
是完整的周期数,φ是激光信号的相位误差。
由于N是整数,因此可以通过测量平均周期数和相位误差来得到目标表面到角反射镜的距离。
激光尺具有高分辨率、高精度和高可靠性的特点,可以应用于
许多需要精确测量长度的场合。
激光尺在机械制造、精密加工、三坐标测量、光学器件校准等领域有着广泛的应用。
综上所述,激光尺利用激光干涉测量原理进行长度测量,通过测量激光信号的相位差以及平均周期数来计算目标表面到角反射镜的距离。
激光尺具有高精度、高分辨率和高可靠性的特点,在许多应用领域有着广泛的应用。
激光干涉仪测长原理典型的激光干涉仪由激光器L、偏振分光镜PBS、测量反射镜M、参考反射镜R、光电检测器D、检偏器P和三个λ/4波片Q1、Q2和Q3组成。
激光为线偏振光,经偏振分光镜分为E1和E2两线偏振光。
当两干涉臂中λ/4波片快轴(或慢轴)与X轴夹角相等且为45度时,两束光通过λ/4波片后均成为圆偏振光,反射后再次通过λ/4波片,又转换为线偏振光,但其振动方向相对原振动方向旋转了90度,且由于两干涉臂光程产生了相位差φ,根据公式:φ=2θ=φ=4πL/λ式中:λ为激光波长,干涉光路的作用是把位移L转变为合成光振动方向的旋转角θ,进而转换成光电信号的相位φ,信号处理器的作用就是测量出φ,从而计算出位移L。
垂直度的测量工具在一台机器施工实例:多轴系统双频激光干涉仪的工作原理双频激光干涉仪其双频激光测量系统由氦氖双频遥置激光干涉仪和电子实时分解系统所组成。
它具有以下优点:稳定性好,抗干扰能力强,可在较快的位移速度下测量较大的距离,使用范围广,使用方便,测量精度高。
基本原理:如图11-2所示,激光双频干涉仪的氦氖激光管,在外加直流轴向磁场的作用下,产生塞曼效应,将激光分成频率为f1和f2,旋向相反的两圆偏振光,经λ/4波片变为线偏振光。
调整λ/4玻片的旋转角度,使f l和f2的振动平面相互垂直,以互垂直,以作激光干涉图11-2 双频激光干涉仪的工作原理图1.激光管2.λ/4波片3. 参考分光镜4. 偏振分光棱境5. 基准锥体棱镜6.移动测量棱体7.10.12.检偏振镜8.9.11.光电管13.光电调制器仪的光源。
当两个线偏振光经过参考分光镜3时(见图11-2),大部分则由偏振分光棱境4分成两束。
偏振面垂直入射面的f2全反射到与分光镜固定在一起的基准锥体棱镜上;偏振面在入射面内的f l则全部通过而射到移动测量棱体6上。
由这两个锥体棱镜反射回来的光束在偏振分光镜上合并,并在检偏振镜上混频。
当移动锥体棱镜时,由于多普勒效应,f1变成f1+△f,因而光电元件8所得到的信号是(f1+△f)-f2。