精密位移量的激光干涉测量方法及实验
- 格式:pdf
- 大小:3.72 MB
- 文档页数:8
激光干涉仪线性测量步骤一、做以下准备:(1)将云台所有旋钮(仰俯、摆动、平移)调至中间位置;(2)将三角架支座脚调至中间位置;(3)带5m长接线板;(4)带百分表、磁力表座、直角尺;(5)带两块水平仪,看机床工作台安装水平;(6)电脑提前开机,并打开测量软件;(7)补偿装置带进场之前提前接好;(8)两个人调光路的同时,一个人输入测量程序。
二、光路调整1. 将激光头置于三角架上,放在机床的右侧。
接电源线预热5分钟左右(激光头指示灯,红灯常亮或闪烁 绿灯常亮),预热时将激光头与电脑之间相连的数据线连接上,之后调节三角架的高低,并用水平仪将激光头调水平。
技巧:(1)大调调三角架支架腿,微调调脚架支座脚。
2)目测激光头相对于反光镜的高低,此时调整可用三角架中间升降摇把。
2. 将反射镜固定在工作台左侧。
注:(1)提前综合布局干涉镜、反光镜与激光头的位置,使它们上下左右对齐,并且反射镜尽量靠近干涉镜。
反射镜红点朝下安装。
(2)反射镜架设应满足全行程(例如:450mm)要求,并且不能和干涉镜相撞。
(3)将激光头尽可能接近工作台右侧行程限位。
技巧:(1)用直角尺将反射镜磁力表座与工作台T型槽调平行;2)用百分表将反射镜磁力表座与工作台T型槽拉平行。
3. 调整反光镜和激光头之间的光路。
(1)旋转激光器的光靶,白点朝下,使激光器发出较小的光束;(2)将机床工作台移动到激光器最近处,将一个光靶置于前端,白点朝上;(3)搬动激光头三角架,并调节三角架中间升降摇把,使激光束打到反射镜光靶白点中心;(4)移动机床X轴,使其逐渐远离激光头,观察反射镜光靶白点上的激光束,看其是否偏移出中心位置,一旦偏移出白点,则暂停机床,调整激光头云台上的水平摆动旋钮(左后侧小旋钮),使光束移动到以光靶白点为中心的水平对称位置,再调整激光头云台上的平移旋钮(左前侧大旋钮),使光束移动到光靶白点中轴线位置,然后调整三角架中间升降摇把,使光束移动到光靶白点中心位置。
实验五、精密位移量的激光干涉测量方法及实验一、实验目的:1.了解激光干涉测量的原理2.掌握微米及亚微米量级位移量的激光干涉测量方法 3.了解激光干涉测量方法的优点和应用场合 二、实验原理本实验采用泰曼-格林(Twyman-Green )干涉系统,T -G 干涉系统是著名的迈克尔逊白光干涉仪的简化。
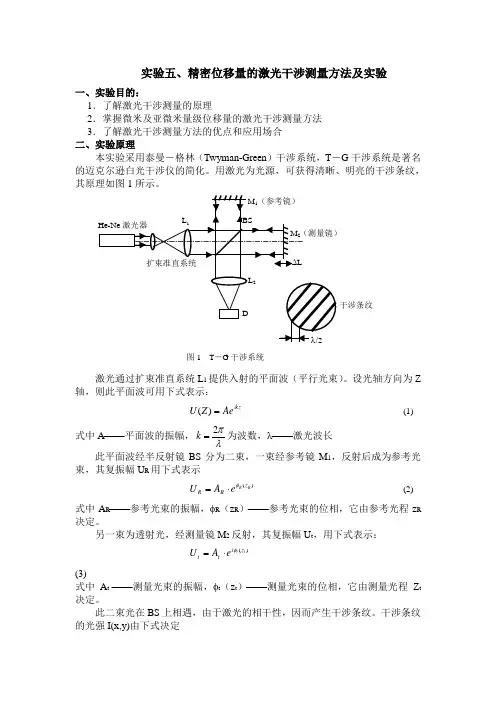
用激光为光源,可获得清晰、明亮的干涉条纹,其原理如图1所示。
图1 T -G 干涉系统激光通过扩束准直系统L 1提供入射的平面波(平行光束)。
设光轴方向为Z轴,则此平面波可用下式表示:ikz Ae Z U =)((1)式中A −−平面波的振幅,λπ2=k 为波数,λ−−激光波长此平面波经半反射镜BS 分为二束,一束经参考镜M 1,反射后成为参考光束,其复振幅U R 用下式表示)(R R z R R e A U φ⋅=(2)式中A R −−参考光束的振幅,φR (z R )−−参考光束的位相,它由参考光程z R 决定。
另一束为透射光,经测量镜M 2反射,其复振幅U t ,用下式表示:)(t t z i t t e A U φ⋅=(3)式中A t −−测量光束的振幅,φt (z t )−−测量光束的位相,它由测量光程Z t 决定。
此二束光在BS 上相遇,由于激光的相干性,因而产生干涉条纹。
干涉条纹的光强I(x,y)由下式决定*⋅=U U y x I ),((4)式中***+=+=t R t R U U U U U U ,,而U*,U R *,U t *为U ,U R ,U t 的共轭波。
当反射镜M 1与M 2彼此间有一交角2θ,并将式(2),式(3)代入式(4),且当θ较小,即sin θ≅θ时,经简化可求得干涉条纹的光强为:)2cos 1(2),(0θkl I y x I +=(5)式中I 0−−激光光强,l −−光程差,t R z z l -=。
式(5)说明干涉条纹由光程差l 及θ来调制。
当θ为一常数时,干涉条纹的光强如图22λ⋅=N l (6) 式中N −−干涉条纹数因此,记录干涉条纹移动数,已知激光波长,由式(6)即可测量反射镜的位移量,或反射镜的轴向变动量∆L 。
精密位移量的激光干涉测量方法及实验一、实验目的:1. 了解激光干涉测量的原理2. 掌握微米及亚微米量级位移量的激光干涉测量方法 3. 了解激光干涉测量方法的优点和应用场合二、实验原理本实验采用泰曼-格林(Twyman-Green )干涉系统,T -G 干涉系统是著名的迈克尔逊白光干涉仪的简化。
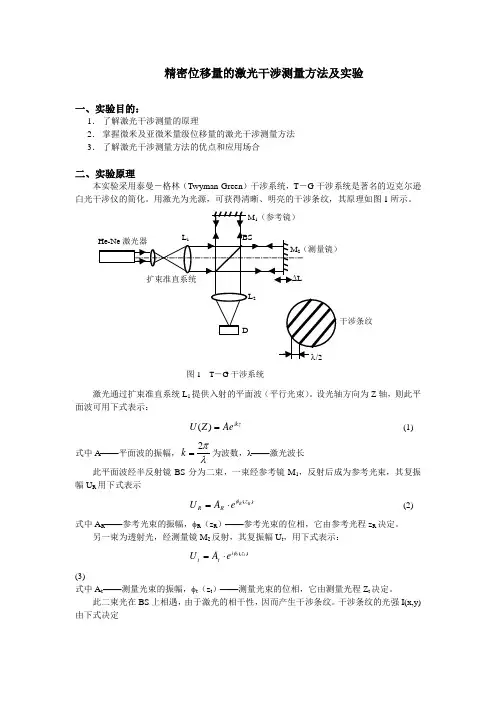
用激光为光源,可获得清晰、明亮的干涉条纹,其原理如图1所示。
图1 T -G 干涉系统激光通过扩束准直系统L 1提供入射的平面波(平行光束)。
设光轴方向为Z 轴,则此平面波可用下式表示:ikz Ae Z U =)((1)式中A −−平面波的振幅,λπ2=k 为波数,λ−−激光波长此平面波经半反射镜BS 分为二束,一束经参考镜M 1,反射后成为参考光束,其复振幅U R 用下式表示)(R R z R R e A U φ⋅=(2)式中A R −−参考光束的振幅,φR (z R )−−参考光束的位相,它由参考光程z R 决定。
另一束为透射光,经测量镜M 2反射,其复振幅U t ,用下式表示:)(t t z i t t e A U φ⋅=(3)式中A t −−测量光束的振幅,φt (z t )−−测量光束的位相,它由测量光程Z t 决定。
此二束光在BS 上相遇,由于激光的相干性,因而产生干涉条纹。
干涉条纹的光强I(x,y)由下式决定*⋅=U U y x I ),( (4)式中***+=+=t R t R U U U U U U ,,而U*,U R *,U t *为U ,U R ,U t 的共轭波。
当反射镜M 1与M 2彼此间有一交角2θ,并将式(2),式(3)代入式(4),且当θ较小,即sin θ≅θ时,经简化可求得干涉条纹的光强为:)2cos 1(2),(0θkl I y x I += (5)式中I 0−−激光光强,l −−光程差,t R z z l -=。
式(5)说明干涉条纹由光程差l 及θ来调制。
当θ为一常数时,干涉条纹的光强如图2所示。
南昌大学实验报告学生姓名:刘pp 学号:5502311pp 专业班级:ppp实验日期:2014/9/17 实验成绩:精密位移量的激光干涉测量方法及实验一、实验目的:1.了解激光干涉测量的原理2.掌握微米及亚微米量级位移量的激光干涉测量方法3.了解激光干涉测量方法的优点和应用场合二、实验原理本实验采用泰曼-格林(Twyman-Green)干涉系统,T-G干涉系统是著名的迈克尔逊白光干涉仪的简化。
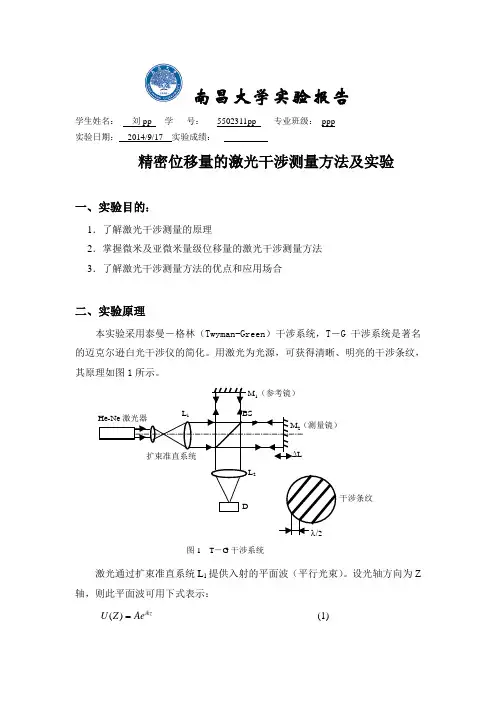
用激光为光源,可获得清晰、明亮的干涉条纹,其原理如图1所示。
图1 T-G干涉系统激光通过扩束准直系统L1提供入射的平面波(平行光束)。
设光轴方向为Z 轴,则此平面波可用下式表示:ikz((1))U=ZAe式中A −−平面波的振幅,λπ2=k 为波数,λ−−激光波长此平面波经半反射镜BS 分为二束,一束经参考镜M 1,反射后成为参考光束,其复振幅U R 用下式表示)(R R z R R e A U φ⋅=(2)式中A R −−参考光束的振幅,φR (z R )−−参考光束的位相,它由参考光程z R 决定。
另一束为透射光,经测量镜M 2反射,其复振幅U t ,用下式表示:)(t t z i t t e A U φ⋅=(3)式中A t −−测量光束的振幅,φt (z t )−−测量光束的位相,它由测量光程Z t 决定。
此二束光在BS 上相遇,由于激光的相干性,因而产生干涉条纹。
干涉条纹的光强I(x,y)由下式决定*⋅=U U y x I ),( (4)式中***+=+=t R t R U U U U U U ,,而U*,U R *,U t *为U ,U R ,U t 的共轭波。
当反射镜M 1与M 2彼此间有一交角2θ,并将式(2),式(3)代入式(4),且当θ较小,即sin θ≅θ时,经简化可求得干涉条纹的光强为:)2cos 1(2),(0θkl I y x I += (5) 式中I 0−−激光光强,l −−光程差,t R z z l -=。
激光干涉仪自动校准五轴加工中心及测量误差分析发布时间:2021-07-08T07:49:20.450Z 来源:《防护工程》2021年7期作者:汤李炳[导读] 近年来,我国的综合国力的发展迅速,激光干涉仪是用特定、稳定的激光束和波长,来测量位移的高精密测量系统。
五轴加工中心的技术含量高、精度高,用于加工复杂零件的高效率的自动化机床,除了X、Y、Z三个基本直线轴外,还有A轴转头和B轴转台。
其准确度按照国家标准和技术规范来评定,常见的如两点法、最小二乘法、VDI3441技术规范、国家标准GB10931等。
汤李炳浙江凯达机床股份有限公司浙江诸暨 311800摘要:近年来,我国的综合国力的发展迅速,激光干涉仪是用特定、稳定的激光束和波长,来测量位移的高精密测量系统。
五轴加工中心的技术含量高、精度高,用于加工复杂零件的高效率的自动化机床,除了X、Y、Z三个基本直线轴外,还有A轴转头和B轴转台。
其准确度按照国家标准和技术规范来评定,常见的如两点法、最小二乘法、VDI3441技术规范、国家标准GB10931等。
要保证加工中心的指标在要求的范围内,才能达到的最理想的加工准确度,若偏差超出范围,那么加工零件的质量就得不到有效控制。
激光干涉仪自动测量机床的误差后,可通过手动输入或连接RS232接口对线性误差进行自动补偿。
如此自动循环的重复测量、补偿后,可以改善加工中心的运动位置偏差,使其达到最佳状态。
本文还对影响激光干涉仪测量误差的常见因素进行了简单分析。
如激光束和镜组与数控轴保持准直(即与运动轴平行),即余弦误差,激光束与运动轴之间没有准直造成测量值与实际值的差异;阿贝误差的存在,是因为测量方法不满足阿贝原则“测量轴线在基准轴线的延长线上”的定义;回转轴与分度器不同心或不平行引起的弧秒或正弦误差。
关键词:激光干涉仪;自动校准五轴加工中心;测量误差分析引言加速度计正在被越来越多地应用于机械制造、车辆船舶、航空航天等众多科研和工程领域。
激光干涉位移测量技术摘要:为了实现纳米级以上分辨力位移的测量研究,利用激光干涉位移测量技术可以达到纳米级分辨力,其具有可溯源、分辨力高、测量速度快等特点,是目前位移测量领域的主流技术。
本文对目前主要的激光干涉位移测量技术进行了分类介绍,并对各种干涉仪的特点进行了分析,最后介绍了激光干涉位移测量技术的国内外发展现状和趋势。
关键词:纳米级;激光干涉;位移测量;1 引言干涉测量技术( interferometry ) 是基于电磁波干涉理论,通过检测相干电磁波的图样,频率、振幅、相位等属性,将其应用于各种相关的测量技术的统称。
用于实现干涉测量技术的仪器被称为干涉仪。
在当今多个科研领域,干涉测量技术都发挥着重要的作用,包括天文学,光纤光学,以及各种工程测量学。
其中由于上个世纪60年代激光的研制成功,使得激光干涉测量技术在各种精密工程领域得到了广泛的应用。
它的基本功能是将机械位移信息变成干涉条纹的电信号,再对干涉条纹进行调理和细分,进而获得所需要的测量信息。
整个激光干涉测量系统中主要的组成部分有光电转换、信号调理、信号细分处理。
1.1激光干涉仪分类激光干涉仪是以干涉测量为原理,利用激光作为长度基准,对数控设备(加工中心、三坐标测量机等)的位置精度(定位精度、重复定位精度等)、几何精度(抚养扭摆角度、直线度、垂直度)进行精密测量的精密测量技术。
由于激光具有波长稳定、波长短、具有干涉性,使得激光在现代光电测量系统中占据了重要的地位,尤其是在激光干涉测量系统中。
下面介绍激光干涉仪测量原理以及激光干涉仪。
光的相长干涉和相消干涉:图1.光的相长以及相消干涉如果两束光相位相同,光波会叠加增强,表现为亮条纹,如果两束光相位相反,光波会相互抵消,表现为暗条纹。
图1.1就是光的相长以及相消干涉,而激光干涉仪主要依据的原理就是激光的干涉产生明亮条纹并将其转换成相关的电信号,从而获取所需要的位移信息。
整个光电系统中激光干涉仪是最重要的组成部分,虽然目前市场存在各式的激光干涉仪,但从其工作的基本原理上来说,主要可以分为单频激光干涉仪以及外差激光干涉仪两种基本类型。
激光干涉与激光干涉仪的实验技术要点激光干涉是一种基于激光光束干涉效应的实验技术,通过测量干涉光的干涉条纹来获取样品的表面形貌、折射率等信息,具有高分辨率、高精度等优点,被广泛应用于科学研究和工程测量领域。
而激光干涉仪作为一种测量设备,则是进行激光干涉实验的关键工具之一。
本文将介绍激光干涉与激光干涉仪的实验技术要点。
一、激光干涉原理与干涉条纹的形成激光干涉的基本原理是利用激光光源的相干性,将激光光束分为两束,然后在样品表面形成干涉条纹。
当两束光程差为整数倍波长时,干涉条纹达到最大强度,反之为最小强度或彼此破灭。
通过观察干涉条纹的变化,可以反推出样品的形貌信息。
二、激光干涉实验的基础装置进行激光干涉实验时,需要一个稳定的激光光源、一个分束器、样品台和一个接收器。
激光光源要具备高亮度、狭窄的光谱宽度和长时间的相干性。
分束器通常采用半透明玻璃或分振幅分束器,用于将激光光束平均地分为两束光。
样品台用于固定样品及调整干涉条件。
接收器收集并分析干涉后的光信号,刻画干涉条纹。
三、调整激光干涉仪的重要步骤1. 调节光路:首先需要调节激光干涉仪的光路,保证激光光源中的光线垂直入射分束器,避免光线的偏移或散射。
2. 调整分束比:分束器分离光线后,需要根据干涉样品的特性调整分束比。
当样品的折射率变化较大时,应选择较大的分束比,以增大干涉条纹的对比度。
3. 调整样品位置:置入样品后,需要调整样品的位置,使样品处于干涉菲涅尔区。
此时,通过移动样品台或调整样品的位置,可以观察到不同形态的干涉条纹。
4. 干涉条纹的记录与分析:将干涉光束投射到接收器上,并使用相应的光学仪器记录和分析干涉条纹。
常用的方法包括干涉光束的照相、干涉光束的放大以及形成色散板干涉。
四、处理干涉条纹的方法在实验中,干涉条纹可能会受到振动、机械者热等因素的干扰,导致干涉信号不稳定。
为了处理这些干扰,可以采取以下方法:1. 抗振动措施:通过激光干涉台在实验中增加稳定性,减少机械振动对干涉信号的影响。
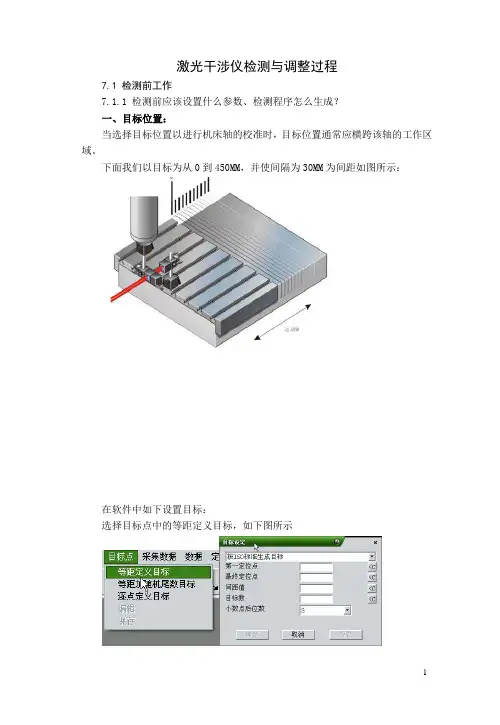
激光干涉仪检测与调整过程7.1 检测前工作7.1.1 检测前应该设置什么参数、检测程序怎么生成?一、目标位置:当选择目标位置以进行机床轴的校准时,目标位置通常应横跨该轴的工作区域。
下面我们以目标为从0到450MM,并使间隔为30MM为间距如图所示:在软件中如下设置目标:选择目标点中的等距定义目标,如下图所示图1 →图2接着弹出如图2的窗口接着我们在内部设置数据如图三所示图3到这里的时候我们将目标点设置完毕,接下来我们要上生成。
二、生成检测程序:激光干涉仪在检测的时候时按照我们在第一步设定的目标点运动的,即从0到450MM每30MM为一个点,因此机床在运动的时候必须和软件设置的一致,所以我们必须生成检测程序。
程序的生成方法图下:选择定义工具栏下的零件程序下的产生按键,如下图所示:图1 →图2在弹出的窗口中输入文件名,并且选择程的序存放路径按保存,会弹出下图:图1 →图2在图1中需要我们选择的为:数控系统的型号。
我们针对我们当前检测机床的数控系统型号作正确的选择,接着弹出图2的窗口,这个窗口要求我们填写与程序相关的数据,我们如下图所示填写:程序号:0001轴名为:Y运行次数为:3选择方向为:双向暂停周期为:4秒越程为:4.0000毫米零件程序类型:线性进给量:1500 ;轴方式为:普通名词解释:程序号:该程序的序号轴名:待校准轴的名称这里记住是大写运行次数:我们希望该程序运行多少次选择方向:在轴上行走的方向时一来一回的间隔点还是只去这样走回时不走暂停周期:等待软件记录数据的时间,这里要根据电脑的性能作调整越程:这里是为了消除方向间隙而设置的,一般选择默认,也可以自行设置零件程序类型:选择运行的方式,因为我们是走直线的所以我们选择线性进给量:机床运动的速度到这里的时候我们已经完成了程序的生成,我们使用文本格式打开文件可以看到程序如下:一定能用得上,所以我们统一使用以下修改过的程序作为标准:机床,但它在系统中的适应度比较强。
干涉法测微小量
激光干涉法是一种用来测量微小量的精密仪器,它通过使用单边激光来实现定位和测量。
它基于物体反射激光束照射在一个固定的参考点,通过物体移动而改变激光束在参考点的位置,得出物体位移量的原理。
其原理是,一束激光从一个发射机发射出来,照射在物体的表面上,反射回另外一个探测机收集,由于物体位置的移动而导致反射激光束和发射激光之间的差异,从这个差异来检测物体位移量,所获得的信息通过传感器进行数据处理,从而实现。
激光干涉法测量优势很多,它不仅具有极高的精度,而且测量时间远快于传统的测量技术,可以准确测量微小量,范围可以达到纳米级,从而使激光干涉法变得非常灵活,可以满足各种精细的测量场合。
激光干涉法的应用也很盛行,它广泛应用于测量微小量,在电子封装、光机械行业以及航空航天等行业有着大量应用。
同时,它也广泛用于衡量望远镜、测量物体大小误差和扫描定位等测量工作中。
因此,激光干涉法在测量微小量上有着很大的作用。
激光干涉法的使用也很容易,几乎可以在任何空间中实现,仪器配件紧凑耐用,高精度,而且配置简单,可以满足客户的多种需求。
此外,本法还可以用于测量极低温和高强度环境,具有良好的适应性。
总之,激光干涉法是一种能实现微小量测量的精密仪器,它具有高精度,配置简单,环境适应性强等优势,在微小量测量中有着独特的优势和作用。
通过不断研发和改进,激光干涉法可以帮助我们更准确的测量微小量,发挥更大的价值。
用激光干涉仪系统进行精确的线性测量—最佳操作及实践经验1 简介本文描述的最佳操作步骤及实践经验主要针对使用激光干涉仪校准机床如车床、铣床以及坐标测量机的线性精度。
但是,文中描述的一般原则适用于所有情况。
与激光测量方法相关的其它项目,如角度、平面度、直线度和平行度测量不包括在内,用于实现0.1微米即0.1 ppm以下的短距离精度测量的特殊方法(如真空操作)也不包括在内。
微米是极小的距离测量单位。
(1微米比一根头发的1/25还细。
由于太细,所以肉眼无法看到,接近于传统光学显微镜的极限值)。
可实现微米级及更高分辨率的数显表的广泛使用,为用户提供了令人满意的测量精度。
尽管测量值在小数点后有很多位数,但并不表明都很精确。
(在许多情况下精度比显示的分辨率低10-100倍)。
实现1微米的测量分辨率很容易,但要得到1微米的测量精度需要特别注意一些细节。
本文描述了可用于提高激光干涉仪测量精度的方法。
2 光学镜组的位置光学镜的安放应保证其间距变化能够精确地反映待校准机器部件的线性运动,并且不受其它误差的影响。
方法如下:2.1 使Abbe(阿贝)偏置误差降至最低激光测量光束应当与需要校准的准线重合(或尽量靠近)。
例如,要校准车床Z轴的线性定位精度,应当对测量激光光束进行准直,使之靠近主轴中心线。
(这样可以极大降低机床俯仰 (pitch) 或扭摆 (yaw) 误差对线性精度校准数据的影响。
2.2 将光学镜组固定牢靠要尽量减小振动影响并提高测量稳定性,光学镜组应牢牢固定所需的测量点上。
安装支柱应尽可能短,所有其它紧固件的横截面都应尽量牢固。
磁力表座应直接夹到机床铸件上。
避免将其夹到横截面较薄的机器防护罩或外盖上。
确保紧固件表面平坦并没有油污和灰尘。
2.3 将光学镜组直接固定在相关的点上材料膨胀补偿通常只应用在与测量激光距离等长的材料路径长度上。
如果测量回路还包括附加的结构,该“材料死程”的任何热膨胀或收缩或因承载而发生的偏斜都将导致测量误差。