喷涂机器人的选型因素、术语和它的关键参数!
- 格式:doc
- 大小:19.00 KB
- 文档页数:4

绪论喷漆机器人【spray painting robot】可进行自动喷漆或喷涂其他涂料的工业机器人。
中国研制出几种型号的喷漆机器人并投入使用,取得了较好的经济效果。
喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,液压驱动的喷漆机器人还包括液压油源,如油泵、油箱和电机等。
多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。
较先进的喷漆机器人腕部采用柔性手腕,既可向各个方向弯曲,又可转动,其动作类似人的手腕,能方便地通过较小的孔伸入工件内部,喷涂其内表面。
喷漆机器人一般采用液压驱动,具有动作速度快、防爆性能好等特点,可通过手把手示教或点位示数来实现示教。
喷漆机器人广泛用于汽车、仪表、电器、搪瓷等工艺生产部门。
机器人首先是从美国开始研制的。
1958年美国联合控制公司研制出第一台机器人。
它的结构特点是机体上安装一回转长臂,端部装有电磁铁的工件抓放机构,控制系统是示教型的。
日本是工业机器人发展最快、应用最多的国家。
自1969年从美国引进两种典型机器人后,大力从事机器人的研究。
目前工业机器人大部分还属于第一代,主要依靠人工进行控制;控制方式则为开环式,没有识别能力;改进的方向主要是降低成本和提高精度。
第二代机器人正在加紧研制。
它设有微型电子计算机控制系统,具有视觉、触觉能力,甚至听、想的能力。
研究安装各种传感器,把感觉到的信息进行反馈,使机器人具有感觉机能。
第三代机器人(机器人)则能独立地完成工作过程中的任务。
它与电子计算机和电视设备保持联系,并逐步发展成为柔性制造系统FMS(Flexible Manufacturing System) 和柔性制造单元FMC(Flexible Manufacturing Cell) 中的重要一环。
随着工业机器人研究制造和应用领域不断扩大,国际性学术交流活动十分活跃,欧美各国和其他国家学术交流活动开展很多。
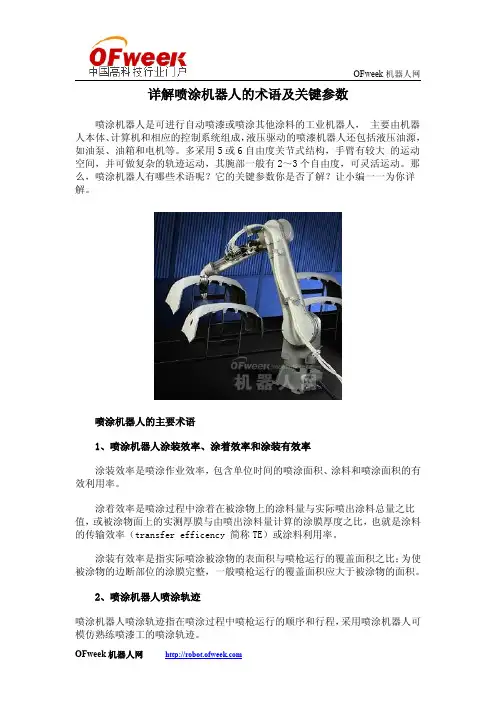
详解喷涂机器人的术语及关键参数喷涂机器人是可进行自动喷漆或喷涂其他涂料的工业机器人,主要由机器人本体、计算机和相应的控制系统组成,液压驱动的喷漆机器人还包括液压油源,如油泵、油箱和电机等。
多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。
那么,喷涂机器人有哪些术语呢?它的关键参数你是否了解?让小编一一为你详解。
喷涂机器人的主要术语1、喷涂机器人涂装效率、涂着效率和涂装有效率涂装效率是喷涂作业效率,包含单位时间的喷涂面积、涂料和喷涂面积的有效利用率。
涂着效率是喷涂过程中涂着在被涂物上的涂料量与实际喷出涂料总量之比值,或被涂物面上的实测厚膜与由喷出涂料量计算的涂膜厚度之比,也就是涂料的传输效率(transfer efficency简称TE)或涂料利用率。
涂装有效率是指实际喷涂被涂物的表面积与喷枪运行的覆盖面积之比;为使被涂物的边断部位的涂膜完整,一般喷枪运行的覆盖面积应大于被涂物的面积。
2、喷涂机器人喷涂轨迹喷涂机器人喷涂轨迹指在喷涂过程中喷枪运行的顺序和行程,采用喷涂机器人可模仿熟练喷漆工的喷涂轨迹。
3、喷涂机器人的涂料流率喷涂机器人涂料流率是单位时间内输给每个旋杯的涂料量,又称喷涂流量、出漆量(率)。
除旋杯转速外,涂料流率是第二个影响雾化颗粒细度的因素。
当其他参数不变的情况下,涂料流率越低,其雾化颗粒越细,但同时也会导致漆雾中溶剂挥发量增大。
喷涂机器人涂料流率高会形成波纹状的涂膜,同时当涂料流量过大使旋杯过载时,旋杯边缘的涂膜增厚至一定程度,导致旋杯上的沟槽纹路不能使涂料分流,并出现层状漆皮,这会产生气泡或涂料滴大小不均匀的不良现象。
喷涂机器人每支喷枪的最大涂料流率与高速旋杯的口径、转速涂料的密度有关,其上限由雾化的细度和静电涂装的效果来决定。
实践经验表明,涂料应在恒定的速度下输入,在小范围内的波动不会影响涂膜质量。
喷涂机器人在实际的喷涂过程中每个旋杯所喷涂的区域不同,其涂料的流率等也不相同,另外由于被涂物外形变化的原因,旋杯的涂料流率也要发生变化。
喷涂机器人多少钱一台
如何选择喷涂机器人1、喷涂机器人的工作轨迹范围
选用喷漆机器人时,需保证机器人的工作轨迹范围必须能完全覆盖被涂工件的相关表面或内腔。
在间歇式输送工作时,喷涂机器人是对精致工件进行喷涂,如不能完全覆盖被涂工件的相关表面或内腔。
在间歇式输送工作时,机器人是对静止工件进行喷涂,如不能完全覆盖被涂工作时,则需增加机器人的外部导轨来扩展其工作轨迹范围。
2、喷涂机器人的重复精度
对于涂胶机器人,重复精度要求较高,一般需达到0.5mm。
而对于喷漆机器人,重复精度要求相对较低,目前各大公司的喷漆机器人均可达到一般要求,比如荣德的喷涂机器人。
3、机器人的运动速度及加速度
喷涂机器人的最大运动速度或最大加速速度越大,则机器人的空行程的时间就越短,则在一定的节拍下,喷漆机器人的绝对作业时间就越长,提高了喷涂机器人的使用率。
应当指出,机器人的运动速度相适应,在喷涂作业过程中,喷涂工具的运动速度与喷涂工具的特性及材料等因素直接相关,需要根据工艺要求设定。
此外,由于喷涂机器人的技术指标与其价格相关,所以应根据生产规模,根据工艺要求选用性比价高的机器人。
4、机器人手臂可承受的最大载荷
根据不同的喷涂场合,喷漆或涂胶过程中所配置的喷具等,来确定喷涂机器人手臂承受的最大载荷。
有时在小型工件喷涂的过程中,喷完漆还利用机器人手臂来提起小工件做传递工作,这时在考虑机器人手臂载荷时,这一因素应考虑进去。
喷涂机器人多少钱一台喷涂机器人的价格不一,以下是小编在阿里巴巴找到的销量最多的喷涂机器人的价格,一起来看了究竟。
但是这个价格仅供参考,定价还是根据实际情况而定。
如何选择喷涂机器人喷涂机器人又叫喷漆机器人或喷粉机器人,是可进行自动喷漆或喷涂其他涂料的工业机器人。
喷涂机器人的主要优点(1)柔性大。
工作范围大大。
(2)提高喷涂质量和材料使用率。
(3)易于操作和维护。
可离线编程,大大的缩短现场调试时间。
(4)设备利用率高。
喷涂机器人的利用率可达90%-95%。
从技术层面来给大家讲一下如何选择喷涂机器人。
一、从喷涂机器人的自由度上来考虑选择喷涂机器人喷涂机器人的自由度也就是喷涂机器人的轴数,轴数越多喷涂机器人的自由度越高,喷涂机器人的灵活性也就越强,所能做的动作就可以更加复杂。
如果只是用于简单的喷涂工作,那么一个四轴喷涂机器人足够完成这个工作了。
但是如果在一个比较狭窄的空间完成特定的工作或者要喷涂复杂的表面,那么喷涂机器人需要有很强的灵活性,那么六轴喷涂机器人是很好的选择。
理论上,轴数越多,灵活性就越强,不过轴数越多需要做的编程工作就越复杂,这个需要视具体工作而定。
二、喷涂机器人的大运动范围每一台喷涂机器人都有大的运动范围和可以到达远的距离,这时候就需要考虑它的运动范围是不是符合自己工厂的喷涂需求。
三、喷涂机器人的喷涂速度一般来说,喷涂机器人技术参数表里都会给出一个大速度,速度高的喷涂机器人效率会高一些,理论上完成工作的时间也会短一些。
三、喷涂机器人的重复定位精度喷涂机器人重复定位精度直接反映了喷涂机器人的精确性,喷涂机器人重复完成一个喷涂动作,到达一个位置会有一个误差,喷涂精度越高的喷涂机器人误差越小,一般的喷涂机器人误差都在±0.5mm 以内,如果你的应用对精度要求非常高,那么这个数据需要着重看一下;如果应用的精度要求不高,也没有必要选择重复定位精度非常高的产品。
四、喷涂机器人防护等级喷涂机器人使用的环境有尘对喷涂机器人的运行产生影响,选择喷涂机器人务必研究一下喷涂机器人的防护等级,不同机器人对各种环境的适应性是有区别的,看准这个条件,选择与工作环境搭配的喷涂机器人。

分类号 学号 M200970278 学校代码 10487 密级硕士学位论文六自由度六自由度喷涂喷涂喷涂机器人机器人机器人关键参数设计关键参数设计关键参数设计与分析与分析学位申请人 :徐科明徐科明 学科专业 :机械机械电子工程电子工程电子工程 指导老师 :杨文玉杨文玉 教 授 答辩日期 : 2011年1月10日A Thesis Submitted in Partial Fulfillment of the Requirementsfor the Degree of Master of EngineeringKey Parameters Design and Analysis for 6-DOFPainting RobotCandidate : Xu KemingMajor :Mechatronic EngineeringSupervisor : Prof. Y ang WenyuHuazhong University of Science and TechnologyWuhan,Hubei 430074,P. R. ChinaMay,2011独创性声明本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。
尽我所知,除文中已经标明引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写过的研究成果。
对本文的研究做出贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。
学位论文作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,即:学校有权保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权华中科技大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
保密□,在年解密后适用本授权书。
本论文属于不保密□。
(请在以上方框内打“√”)学位论文作者签名:指导教师签名:日期:年月日日期:年月日摘要目前,制造业尤其是汽车行业的迅速增长,对研发具有自主知识产权的喷涂机器人成套装备提出了迫切需求。
喷漆机器人第一篇:喷漆机器人喷漆机器人摘要:喷漆机器人【spray painting robot】可进行自动喷漆或喷涂其他涂料的工业机器人。
中国研制出几种型号的喷漆机器人并投入使用,取得了较好的经济效果。
喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,液压驱动的喷漆机器人还包括液压油源,如油泵、油箱和电机等。
多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。
较先进的喷漆机器人腕部采用柔性手腕,既可向各个方向弯曲,又可转动,其动作类似人的手腕,能方便地通过较小的孔伸入工件内部,喷涂其内表面。
喷漆机器人一般采用液压驱动,具有动作速度快、防爆性能好等特点,可通过手把手示教。
关键字:发展现状;趋势;关键部位;传动方式;控制系统0 引言目前,我国大型油罐的喷砂除锈、喷漆防腐主要采用依靠脚手架的传统人工作业方式,但此方式劳动强度大、工程质量差、工作环境恶劣。
随着石化工业的迅速发展,特别是国家石油战略储备基地的建立,研制大型油罐喷砂/喷漆自动化设备势在必行。
爬壁机器人正是此方面国内外的研究热点,但爬壁机器人普遍构造复杂、负载能力低、易坠落,特别是只能爬油罐外壁不能爬内壁,稳定性差,并不实用。
因此低成本、易拆装、可实用的新型油罐喷砂/喷漆机器人的设计迫在眉睫。
国内机器人发展现状及趋势中国工业机器人发展长期以来受限于成本较高同时国内劳动力价格低廉的状况,使得工业机器人应用面十分狭窄,但是随着中国经济持续快速扩张,人民生活水平不断提高,随着劳动力过剩程度的降低,单个工人的成本上升,对于产品质量更高的要求以及国家对装备制造业的重视,工业机器人及其技术在中国得到了政府和产业界的广泛重视。
政府努力加快中国装备制造业尤其是工业机器人的发展,采取各种措施扩大中国装备制造业在市场中占据的份额,并提供优惠措施鼓励更多企业使用机器人及其技术以提升技术水平。
产业界也开始重视工业机器人在降低劳动成本、减少劳动风险、提高产品质量中所起的巨大作用。
关于喷涂机的选购介绍喷涂机是一种常见的涂装设备,广泛应用于汽车、航空、建筑等领域,可以快速、高效地完成涂装任务。
但是,市场上的喷涂机种类繁多,价格参差不齐,如何选择一款质量可靠、性价比高的喷涂机成为了许多人面临的难题。
在本文中,我们将会介绍喷涂机的选购要点和注意事项,帮助大家更好地选择适合自己的喷涂机。
喷涂机的种类目前,市面上的喷涂机种类主要分为空气喷涂机和无气喷涂机两种。
空气喷涂机空气喷涂机广泛应用于家庭和小型工作坊,它的工作原理是通过喷枪的高速喷气来将涂料吹散,在空气的辅助下均匀喷涂在物体表面上。
空气喷涂机操作简单、易于维护,适合涂装面积较小的物体,价格相对便宜。
无气喷涂机无气喷涂机是近年来逐渐流行的一种高压喷涂技术,它使用高压泵将涂料压入喷枪喷嘴,形成液柱,并通过高速的气流将其切散形成小液滴,最终均匀喷涂在物体表面上。
与空气喷涂机相比,无气喷涂机可以呈现出更加平滑均匀的涂层,精度更高,适合涂装面积较大的物体,价格相对较高。
喷涂机的选购要点喷涂任务类型首先要考虑的是你需要喷涂的物体性质和涂料类型。
不同的物体和涂料需要选择不同类型的喷涂机。
例如,需要喷涂大面积的家具或建筑墙壁时,无气喷涂机可能是更好的选择;而喷涂金属或塑料制品时,需要选择适合该材料的喷枪材质。
因此,在选择喷涂机之前,一定要明确喷涂任务的具体类型和需求。
喷涂机的质量和性能喷涂机的质量和性能直接决定了涂装效果和工作效率。
因此,在选购时必须要考虑到这些方面。
选择质量稳定、性能优越的喷涂机能够大大提高工作效率,同时也可以避免出现喷涂不均匀、喷漆量过多或过少等问题,满足用户的涂装需求。
喷涂机的使用便捷性和维护成本喷涂机使用便捷性以及后期维护成本也是影响选择的重要因素。
选择操作简单、易于维护的喷涂机,能够降低学习和使用成本,为用户节省时间和精力。
同时,在喷涂机的保养方面,也要考虑到耗材和维修费用等因素,以避免后期的额外成本开支。
总结选择一款合适的喷涂机不仅能够提高涂装效率和涂装品质,还能为用户省去时间和精力。
关于喷涂机的选购介绍喷涂机是一种广泛应用于各个行业的设备,它可以喷涂各种物体的表面,使其具有防腐、装饰、防水等多种功能。
在选择喷涂机时,需要考虑以下几个方面:技术参数、品牌选择、价格比较、售后服务等。
首先,要了解喷涂机的技术参数。
技术参数包括喷涂机的额定功率、喷涂宽度、喷涂速度、最大喷涂厚度等。
这些参数直接影响到喷涂效果和工作效率。
根据自己的实际需求,选择适合的技术参数。
其次,要选择知名品牌的喷涂机。
知名品牌的喷涂机通常具有更好的品质和更稳定的性能。
常见的喷涂机品牌有通力、就神、鸿翔等。
可以通过上网查找品牌的口碑和评价,选择合适的品牌。
然后,比较不同品牌的喷涂机价格。
价格是我们购买喷涂机时最关心的一个因素。
不同品牌、不同型号的喷涂机价格有所差异。
可以通过在多个销售渠道进行比较,选择价格优惠的喷涂机。
最后,要考虑售后服务。
喷涂机是一种机械设备,使用过程中难免会发生故障。
因此,选择有良好售后服务的品牌和销售商十分重要。
可以选择提供长时间质保和及时维修服务的销售商。
在购买喷涂机时,还需要考虑以下几个方面:应用领域、使用材料、适用场景等。
不同的领域和场景对喷涂机的要求有所不同,有些喷涂机适用于喷涂木材,有些适用于喷涂汽车等。
因此,在购买前要充分了解自己的需求和要求,选择适合自己的喷涂机。
另外,喷涂机是一种机械设备,需要正确使用和维护。
在使用前要详细阅读使用手册,并按照说明进行操作。
在使用过程中要注意安全,佩戴好防护设备,避免喷涂机产生的气体对人体造成伤害。
同时要定期对喷涂机进行维护保养,检查各个部位是否正常运行,及时更换损坏的部件。
总结起来,选择适合自己的喷涂机需要考虑技术参数、品牌选择、价格比较和售后服务等因素。
在购买喷涂机前要充分了解自己的需求和要求,并选择知名品牌的优质产品。
在使用和维护喷涂机时要按照说明书进行操作,保证设备的正常运行。
这样才能选购到适合自己的喷涂机,实现高效、稳定的喷涂效果。
工业机器人自动喷涂生产线参数设计1.喷涂机器人的简介喷涂机器人主要是集成了喷涂工艺系统和防爆系统的工业机器人,可以根据不同的工件采用不同的程序对工件的表面进行油漆的喷涂,机器人的程序可以由人工根据工件的形状预先示教(编写好程序)而成,也可以由专业的模拟软件根据工件的模型先在电脑中运用专业的模拟软件(如robot-studio)进行模拟然后再将模拟的程序从电脑导至机器人控制器,从而可以节省大量的现场调试时间和新产品开发周期。
根据国内外多家客户使用证明,喷涂机器人在机车诸多应用中不仅可以大大提高生产效率,改善员工的工作环境,并且可以节省大量的运营成本,提高工件品质。
针对机车表面颜色多变的要求,机器人还可以配置换色阀,可以对油漆进行快速的切换,节省换漆时对管路和喷枪的清洗时间。
2.机器人喷涂的优势1)降低运营成本,减少原料的浪费,提高成品率喷涂机器人集成了喷涂工艺系统(IPS),可以提高油漆喷漆的上漆率,提高油漆的利用率。
机器人喷涂可以根据工件的宽度调节不同的喷幅,比如在喷涂车厢大面积平喷涂可以采用200MM的扇幅,而在喷涂例如一些边缝时,则可以采用小的扇幅,如50MM。
并且在喷涂过程中,可以自由的开关枪,不需要改变机器人的喷涂程序,可以节省油漆的消耗量,并且极其方便。
由于机器人喷涂的高精度,如ABB IRB5400和IRB5500的重复精度达到0.15MM,因此机器人喷涂的膜厚的精度可以达到正负3UM。
相比人工的喷涂,既可以提高机车表面的成膜质量与一致性,提高成品率,减少修补工作量,又可以节省油漆。
特别是在要求严格的场合,油漆的流量可以实现闭环控制,即机器人在喷漆的过程中会根据流量计自动检测当前流量并且与设定流量进行对比,根据信号的反馈值自动调节流量阀的开度,以达到精确控制流量的目的。
双组份油漆可以采用预混(即油漆和固化剂预先配好),也可以采用喷枪前混合。
采用喷枪前混合可以减少油漆的浪费,因为当油漆和固化剂配好之后,如果有任何问题暂时停喷涂时,油漆会固化,而油漆和固化剂在喷枪前混合则可以避免这种情况发生。
工业机器人选型的9大参数By Mathieu人们经常讨论“机器人”。
首先,对于工业自动化的行业外人士来说,要澄清的是工厂使用的“机器人”绝对不是类似的我的机器人女友中的类人机器人。
对于自动化行业的老鸟,资深的机、电工程师来说,选择合适的“机器人”也许是一个简单的工作。
但是对于那些第一次准备购买、导入机器人的设计人员或工厂来说,也许会有些迷茫。
下面从9个专业的参数方面,讨论如何选择一个合适的工业机器人。
1. 应用场合首先,最重要的源头是评估导入的机器人,是用于怎样的应用场合以及什么样的制程。
l若是应用制程需要在人工旁边由机器协同完成,对于通常的人机混合的半自动线,特别是需要经常变换工位或移位移线的情况,以及配合新型力矩感应器的场合,协作型机器人(Cobots)应该是一个很好的选项。
l如果是寻找一个紧凑型的取放(Pick & Place)料机器人,你可能想选择一个水平关节型机器人(Scara)。
l如果是寻找针对小型物件,快速取放的场合,并联机器人(Delta)最适合这样的需求。
工厂里指代的“机器人”l接下来的讨论,我们将针对垂直关节多轴机器人(Multi-axis)。
这种机器人可以适应一个非常大范围的应用。
从取、放料到码垛,以及喷涂,去毛刺,焊接等专用制程。
现在,工业机器人制造商基本上针对每一种应用制程都有相应的机器人方案。
你所做的只需要明确你希望机器人为你做哪个工作,以及从不同的种类当中,选择最适合的型号。
2.有效负载有效负载是,机器人在其工作空间可以携带的最大负荷。
从例如3Kg到1300Kg不等。
如果你希望机器人完成将目标工件从一个工位搬运到另一个工位,需要注意将工件的重量以及机器人手爪的重量加总到其工作负荷。
另外特别需要注意的是机器人的负载曲线,在空间范围的不同距离位置,实际负载能力会有差异。
3.自由度(轴数)机器人配置的轴数直接关联其自由度。
如果是针对一个简单的直来直去的场合,比如从一条皮带线取放到另一条,简单的4轴机器人就足以应对。
喷涂机器人选择要考虑的内容
喷涂机器人是可进行自动喷漆或喷涂其他涂料的工业机器人,喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,液压驱动的喷漆机器人还包括液压油源,如油泵、油箱和电机等。
现在越来越多的生产制造商开始在涂装生产线上,采用喷涂机器人进行喷涂作业,喷涂机器人选择要考虑的内容有以下方面。
一、选择喷涂机器人要考虑喷涂产品大小
毋庸置疑不同型号、不同厂家、不同特点以及不同性能的喷涂机器人它所工作的范围是不一样的,所以大家要根据喷涂产品的大小,来选择喷涂空间范围相适合的喷涂机器人,只有这样才能确保喷涂机器人的工作范围能涵盖被喷涂产品的喷涂表面。
二、选择喷涂机器人要考虑喷枪和喷涂形式
我们知道喷涂机器人的喷枪有空气枪、静电喷枪与静电喷粉枪这几种,而不同的喷枪不仅油漆利用率不同,而且其喷涂效果也不一样,所以喷涂作业者务必要根据喷枪的形式,来选择合适自己产品特点的喷涂机器人,另外根据喷涂的形式选择喷涂机器人也相当重要。
三、选择喷涂机器人考虑机器人厂家技术实力
在选择喷涂机器人的时候,不容忽视的一点是喷涂机器人技术的延续性和所具备的实力大小,所以一定要选择有实力口碑好的喷涂机器人厂家,千万不能一味的看价格,需要提及的是只有花费合适的钱才能买到耐用的、性价比合适喷涂机器人,这样生产效率和工作质量
才有保证。
由此可见选择喷涂机器人一方面要从喷涂产品的大小、喷枪的形式来入手,另外也要基于喷涂机器人的技术方面进行考虑。
喷涂机器人的选型因素、术语和它的关键参数!
喷涂机器人是可进行自动喷漆或喷涂其他涂料的工业机器人,主要由机器人本体、计算机和相应的控制系统组成,液压驱动的喷涂机器人还包括液压油源,如油泵、油箱和电机等。
多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。
目前,喷涂机器人的智能化程度正在逐步提高!
喷涂机器人主要应用于3C行业、汽车制造业以及家具行业,未来将大量替代人工。
那么下面来了解一下喷涂机器人的选型因素、术语和它的关键参数!
一、喷涂机器人的选型因素
(1)机器人的工作轨迹范围。
在选择机器人时需保证机器人的工作轨迹范围必须能够完全覆盖所需施工的工件的相关表面或内腔。
除工件断面上,还需保证在工件俯视面上机器人的工作范围能够完全覆盖所需施工的工件相关表面。
左右两台机器人各覆盖左右半个车身,当机器人的工作轨迹范围在输送运动方向上无法满足时,则需要增加机器人的外部导轨,来扩展其工作范围轨迹。
(2)机器人的重复精度。
对于涂胶机器人而言,一般重复精度达到0.5mm即可。
而对于喷漆机器人,重复的精度要求可低一些。
(3)机器人的运动速度及加速度。
机器人的最大运动速度或最大加速度越大,则意味着机器人在空行程所需的时间越短,则在一定节拍内机器人的绝对施工时间越长,可提高机器人的使用率。
所以机器人的最大运动速度及加速度也是一项重要的技术指标。
但需注意的问题是,在喷涂过程中(涂胶或喷涂),喷涂工具的运动速度与喷涂工具的特性及材料等因素直接相关,需要根据工艺要求设定。
此外,由于机器人的技术指标与其价格直接相关,因而根据工艺要求选择性价比高的机器人。