喷涂机器人的调试、设定参数的知识
- 格式:ppt
- 大小:2.18 MB
- 文档页数:67
目录主要设备简介2人机界面概要8一、初始界面8二、生产线画面9三、联锁画面12四、旋杯画面14五、喷涂设定14六、清洗设定15七、生产统计16八、故障报警16启动机器人步骤17MIP 手动输入盘介绍18设备操作手册主要设备简介工程由中涂、面漆、罩光三个自动站构成。
各站设备如下表:1、变压器:为机器人系统和控制系统提供200V恒压电源。
开启系统前应先翻开变压器上空开,开启变压器。
变压器将自动调压,使输出稳定在200V2、主控柜:主控柜左侧门上的总电源指示灯,电压表、电压表以及主空开。
总电源电压表电流表主空开此时主控柜左侧门上总电源指示灯将点亮,电压表将交替显示各相、线电压值,电流表将显示各相上电流。
此时将主空开翻开,此时设备电源接通。
主控柜右侧门上控制电源及急停、报警、复位按钮。
220V电源:当控制电源翻开时该指示灯点亮;电源开关:电源开关是开启、关闭控制电源〔PLC系统〕的开关;报警复位:与OP柜上报警复位按钮作用一样,用来复位报警;蜂鸣器停顿:用来关闭报警产生后蜂鸣器;备用:有需要时可使用;系统急停:与其他急停按钮作用一样,用于紧急情况停顿设备。
3、机器人/旋杯:喷涂执行设备。
4、N*100&AP:机器人控制柜以及喷涂系统的空气配置柜。
N*100用于机器人操作、示教、控制等。
AP用于给旋杯系统,换色阀系统配置气源。
5、OP柜:操作盘和人机界面是生产过程中对机器人喷涂线的操作和监控的最重要方式,也是生产线得以正常运行的重要局部。
操作者需熟练掌握各开关、按钮、指示灯的作用和意义以及相关操作。
以下以面漆四台机器人为例,介绍各OP柜上各元件的作用及意义:⑴各机器人选择、示教、再现选择开关L1、L2、R1、R2分别对应生产线上的四台机器人。
每个机器人都有连个状态:示教状态和再现状态〔自动运行状态〕。
画面中四个开关均为三位置开关,分别对应每台机器人的每种状态,由此可对每台机器人进展独立的手动操作和再现运行操作。
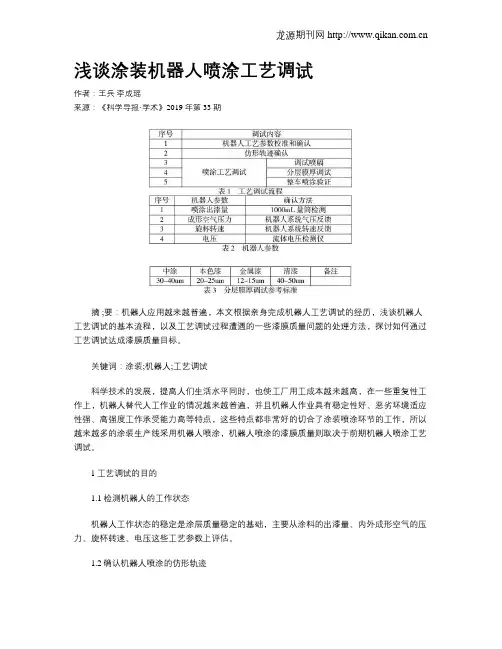
浅谈涂装机器人喷涂工艺调试作者:王兵李成瑶来源:《科学导报·学术》2019年第33期摘 ;要:机器人应用越来越普遍,本文根据亲身完成机器人工艺调试的经历,浅谈机器人工艺调试的基本流程,以及工艺调试过程遭遇的一些漆膜质量问题的处理方法,探讨如何通过工艺调试达成漆膜质量目标。
关键词:涂装;机器人;工艺调试科学技术的发展,提高人们生活水平同时,也使工厂用工成本越来越高,在一些重复性工作上,机器人替代人工作业的情况越来越普遍,并且机器人作业具有稳定性好、恶劣环境适应性强、高强度工作承受能力高等特点,这些特点都非常好的切合了涂装喷涂环节的工作,所以越来越多的涂装生产线采用机器人喷涂,机器人喷涂的漆膜质量则取决于前期机器人喷涂工艺调试。
1工艺调试的目的1.1检测机器人的工作状态机器人工作状态的稳定是涂层质量稳定的基础,主要从涂料的出漆量、内外成形空气的压力、旋杯转速、电压这些工艺参数上评估。
1.2确认机器人喷涂的仿形轨迹机器人喷涂的仿形轨迹就是后续的喷涂路径,仿形轨迹的喷涂距离和轨迹之间的间隔距离都需要合理设定,并且所有需要机器人喷涂的面都必须有合理的仿形轨迹[1]。
1.3调试喷涂工艺参数机器人喷涂工艺参数就是涂料的出漆量、内外成形空气的压力、旋杯转速、电压,根据涂层的质量要求,通过调整这些工艺参数达到相应的质量要求。
2工艺调试2.1工艺调试流程校准和确认机器人的喷涂参数是下一步调试工作的基础,然后验证仿形轨迹,确认仿形轨迹后进行工艺调试,工艺调试主要有定调试喷幅、分层膜厚调试、整车喷涂验证几个步骤。
2.2机器人工艺参数校准和确认机器人工艺参数校准和确认的为了保证实际工作参数和我们设定的参数一致,主要是喷涂出漆量、成形空气压力、旋杯转速和电压。
2.3仿形轨迹确认机器人仿形轨迹完成后,涂装工艺人员根据节拍时间、喷涂距离、轨迹间距以及喷涂姿态对喷涂轨迹的布置是否正确、轨迹速度和方向是否合理进行评估。
机器人的轨迹行走时间和清洗时间之和必须小于节拍时间,超出节拍时间会降低整个涂装车间生产效率[2]。
喷涂机器人的喷涂方法喷涂机器人喷涂之前要对它进行参数的设置,喷涂参数设置好以后放上被喷涂的产品按照所设置的参数就开始自动喷涂作业了。
喷涂机器人的主要参数设置有:涂料喷涂量、空气流量、涂料电压值、参数过载百分比、机械臂运行速度等。
下面分三个方便讲一下喷涂机器人的喷涂方法。
一、喷涂机器人的喷涂参数设置1、涂料喷涂量:自动喷涂机器人的涂料喷涂量是指单位时间传输到旋杯的涂料量,又称出漆量,一般在100-600mL/min内设置。
当其他参数不变的情况下,喷涂量越小,其雾化颗粒越细,但同时漆雾中的溶剂挥发量增大,直接导致桔皮、膜厚偏低等质量缺陷;喷涂量过大时,会影响涂料的雾化效果,使旋杯过载,造成雾化难,产生滴漆、流挂、气泡等不良现象。
因为在实际的喷涂过程中,每台机器人喷涂的区域不同,所以要设置不同的喷涂量。
2、空气流量:自动喷涂机器人的空气流量一般在100-400NL/min 内调整,它的作用是调整漆雾的幅度,并将漆雾推向被涂物,防止漆雾扩散或往后反弹而污染旋杯和雾化器。
对于较小喷嘴环的成形空气形成一个较宽的喷涂锥形,在喷涂较大面积时有优势。
较大喷嘴环的成形空气形成一个较窄的喷涂锥形,在喷涂较小的面积和局部喷涂时有优势。
整形空气压力过高,会引起干扰气流,比较容易污染喷涂器具;整形空气压力过低时,对喷幅影响小,但也会造成旋杯的污染。
为防止涂料残留在喷涂器具上,需要根据涂料量和实际经验准确地调整整形空气流量。
3、涂料电压值:机械手静电喷涂的电压一般在40-70kV内调整,在高转速杯式静电涂装场合,旋杯喷枪为负极,接地的被涂物车身为正极,在两极间施加高电压后产生的强电吸引力是将靠离心力机械雾化的漆雾颗粒传输到接地的被涂件上的主要作用力。
因此喷涂电压值的大小,直接影响静电涂装的静电效应、上漆率和涂膜的均匀性。
若雾化器到车身的距离一定时,电压值越高,静电场越强,漆滴的荷电量随电压增高而增大,则吸引力也就越大,上漆率越高。
喷涂机器人毕业设计(二)引言概述:喷涂机器人作为一种自动化设备,广泛应用于各个工业领域,具有提高生产效率、降低人工成本以及提高产品质量的重要作用。
本文将对喷涂机器人毕业设计的相关内容进行详细阐述,包括机器人的结构设计、喷涂控制系统的设计、机器人运动规划算法的研究、操作界面与远程监控设计以及毕业设计的总结。
正文:一、机器人的结构设计:1. 定义机器人的功能要求,包括喷涂范围、喷涂材料及喷涂速度等。
2. 设计机器人的机械结构,包括机器人臂的长度、关节的数量以及材料的选择。
3. 确定机器人的驱动方式,可以采用电动驱动、液压驱动或气动驱动等。
4. 选取适合的传感器用于实时监测机器人的位置和姿态。
二、喷涂控制系统的设计:1. 确定控制系统的硬件平台,可以选择单片机、嵌入式系统或工控机等。
2. 开发相应的驱动程序,实现机器人的运动控制和喷涂控制。
3. 配置相应的传感器,用于监测喷涂液体的流量、喷涂压力等参数。
4. 设计控制系统的参数调整界面,方便操作员进行参数设置和调整。
5. 进行控制系统的测试和调试,确保系统可以稳定运行和精准喷涂。
三、机器人运动规划算法的研究:1. 分析机器人的运动学和动力学特性,推导出机器人的运动学方程和动力学方程。
2. 针对喷涂工艺要求,研究合适的运动规划算法,保证机器人在喷涂过程中精确控制位置和姿态。
3. 优化运动规划算法,减少机器人的运动时间和能耗,并提高喷涂效果。
四、操作界面与远程监控设计:1. 开发机器人操作界面,包括喷涂参数设置、运动控制和状态监测等功能。
2. 设计远程监控系统,实现对机器人工作状态的实时监控和远程控制。
3. 集成机器人操作界面和远程监控系统,实现友好的人机交互和方便的操作。
五、毕业设计总结:1. 回顾整个设计过程,总结设计中遇到的问题和解决方案。
2. 分析设计结果和实验数据,评估设计的可靠性和效果。
3. 提出进一步改进的建议,尝试优化机器人性能和喷涂效果。
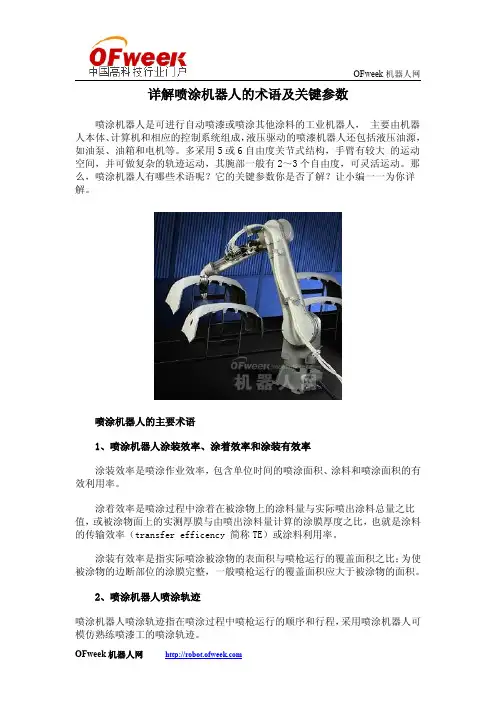
详解喷涂机器人的术语及关键参数喷涂机器人是可进行自动喷漆或喷涂其他涂料的工业机器人,主要由机器人本体、计算机和相应的控制系统组成,液压驱动的喷漆机器人还包括液压油源,如油泵、油箱和电机等。
多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。
那么,喷涂机器人有哪些术语呢?它的关键参数你是否了解?让小编一一为你详解。
喷涂机器人的主要术语1、喷涂机器人涂装效率、涂着效率和涂装有效率涂装效率是喷涂作业效率,包含单位时间的喷涂面积、涂料和喷涂面积的有效利用率。
涂着效率是喷涂过程中涂着在被涂物上的涂料量与实际喷出涂料总量之比值,或被涂物面上的实测厚膜与由喷出涂料量计算的涂膜厚度之比,也就是涂料的传输效率(transfer efficency简称TE)或涂料利用率。
涂装有效率是指实际喷涂被涂物的表面积与喷枪运行的覆盖面积之比;为使被涂物的边断部位的涂膜完整,一般喷枪运行的覆盖面积应大于被涂物的面积。
2、喷涂机器人喷涂轨迹喷涂机器人喷涂轨迹指在喷涂过程中喷枪运行的顺序和行程,采用喷涂机器人可模仿熟练喷漆工的喷涂轨迹。
3、喷涂机器人的涂料流率喷涂机器人涂料流率是单位时间内输给每个旋杯的涂料量,又称喷涂流量、出漆量(率)。
除旋杯转速外,涂料流率是第二个影响雾化颗粒细度的因素。
当其他参数不变的情况下,涂料流率越低,其雾化颗粒越细,但同时也会导致漆雾中溶剂挥发量增大。
喷涂机器人涂料流率高会形成波纹状的涂膜,同时当涂料流量过大使旋杯过载时,旋杯边缘的涂膜增厚至一定程度,导致旋杯上的沟槽纹路不能使涂料分流,并出现层状漆皮,这会产生气泡或涂料滴大小不均匀的不良现象。
喷涂机器人每支喷枪的最大涂料流率与高速旋杯的口径、转速涂料的密度有关,其上限由雾化的细度和静电涂装的效果来决定。
实践经验表明,涂料应在恒定的速度下输入,在小范围内的波动不会影响涂膜质量。
喷涂机器人在实际的喷涂过程中每个旋杯所喷涂的区域不同,其涂料的流率等也不相同,另外由于被涂物外形变化的原因,旋杯的涂料流率也要发生变化。
Fanuc机器人喷涂培训教程CONTENTS•目录•Fanuc机器人简介•喷涂工艺及设备介绍•Fanuc机器人喷涂系统配置与调试•Fanuc机器人喷涂编程与操作•Fanuc机器人喷涂维护与保养目录01培训背景与目的背景随着工业自动化的发展,Fanuc机器人在喷涂领域的应用越来越广泛。
为了提高操作人员的技能水平,满足企业对于机器人喷涂人才的需求,开展此次培训。
目的通过培训使学员掌握Fanuc机器人的基本操作、喷涂工艺参数设置、常见故障排除等技能,提升学员的实际操作能力和解决问题的能力。
包括机器人示教器使用、坐标系设置、程序编写与调试等。
Fanuc 机器人基本操作喷涂工艺参数设置常见故障排除实际操作演练根据不同的喷涂材料和工件要求,设置合适的喷涂速度、喷枪距离、喷幅等参数。
介绍Fanuc 机器人在喷涂过程中可能出现的故障及其排除方法,提高学员的应急处理能力。
组织学员进行实际操作演练,加深对于所学知识的理解和掌握。
课程内容与安排培训对象与要求培训对象面向从事机器人喷涂工作的操作人员、技术人员及管理人员。
要求学员应具备一定的机械、电气基础知识,了解喷涂工艺流程,并具备一定的计算机操作能力。
同时,学员应认真听讲、积极参与实践操作,确保培训效果。
Fanuc 机器人简介02技术积累随着工业自动化的不断发展,Fanuc 开始将技术应用于工业机器人领域,逐渐积累了丰富的经验和技术实力。
初始阶段Fanuc 机器人公司最初成立于1956年,专注于数控系统的研发和生产。
产品推出自1974年起,Fanuc 相继推出了多款工业机器人产品,包括点焊、弧焊、搬运、装配、喷涂等多种类型,广泛应用于汽车、电子、机械等领域。
该系列机器人具有高速、高精度、高可靠性的特点,适用于搬运、码垛、上下料等作业。
M 系列该系列机器人拥有紧凑的机身和卓越的动作性能,适用于装配、打磨、涂胶等作业。
R 系列该系列机器人是轻型机器人,适用于50公斤以下的搬运、定位、上下料等作业。
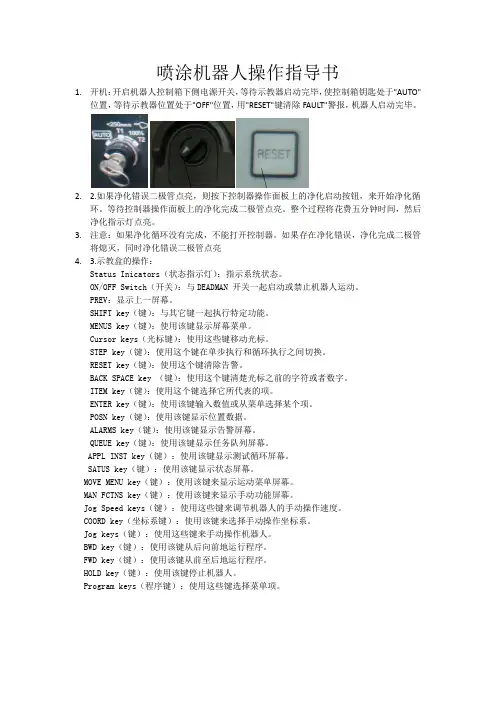
喷涂机器人操作指导书1.开机:开启机器人控制箱下侧电源开关,等待示教器启动完毕,使控制箱钥匙处于"AUTO"位置,等待示教器位置处于"OFF"位置,用"RESET"键清除FAULT"警报,机器人启动完毕。
2. 2.如果净化错误二极管点亮,则按下控制器操作面板上的净化启动按钮,来开始净化循环。
等待控制器操作面板上的净化完成二极管点亮。
整个过程将花费五分钟时间,然后净化指示灯点亮。
3.注意:如果净化循环没有完成,不能打开控制器。
如果存在净化错误,净化完成二极管将熄灭,同时净化错误二极管点亮4. 3.示教盒的操作:Status Inicators(状态指示灯):指示系统状态。
ON/OFF Switch(开关):与DEADMAN 开关一起启动或禁止机器人运动。
PREV:显示上一屏幕。
SHIFT key(键):与其它键一起执行特定功能。
MENUS key(键):使用该键显示屏幕菜单。
Cursor keys(光标键):使用这些键移动光标。
STEP key(键):使用这个键在单步执行和循环执行之间切换。
RESET key(键):使用这个键清除告警。
BACK SPACE key (键):使用这个键清楚光标之前的字符或者数字。
ITEM key(键):使用这个键选择它所代表的项。
ENTER key(键):使用该键输入数值或从菜单选择某个项。
POSN key(键):使用该键显示位置数据。
ALARMS key(键):使用该键显示告警屏幕。
QUEUE key(键):使用该键显示任务队列屏幕。
APPL INST key(键):使用该键显示测试循环屏幕。
SATUS key(键):使用该键显示状态屏幕。
MOVE MENU key(键):使用该键来显示运动菜单屏幕。
MAN FCTNS key(键):使用该键来显示手动功能屏幕。
Jog Speed keys(键):使用这些键来调节机器人的手动操作速度。

FANUC 喷涂机器人安装1.喷涂机器人安装准备① 内部调试前首先确认一下机器人的硬件配置,看是否带齿轮泵附加 轴(IPC)。
② 喷涂机器人控制柜中是否带有所需要的附加功能板卡。
如Linetracking和 喷涂机器人控制柜中是否带有所需要的附加功能板卡 如Li t ki 和 Profibus ③ 现场安装时需要确认机器人安装位置是否和布置图中的位置是否一致 ④ 机器人安装底座是否稳固,固定螺丝是否拧紧。
⑤ 安装底座上的机器人固定位置螺孔的相对位置是否正确以P-250的底座尺寸举例2.机器人安装检查① 电缆连接 电缆连接方式主要是两种: 一种用Harting接头形式两端接口连接 g另一种电缆直接进入控制柜中CNGA3 6Purge 24V Encoder 5V BrakeCNGC1245② 机器人控制柜电源电压 在给机器人上电之前需要检查控制柜的输入电压范围 主要在机器人控制柜门 在给机器人上电之前需要检查控制柜的输入电压范围,主要在机器人控制柜门 左下角位置的铭牌处。
另外还需要在控制柜内主开关后检查接入变压器前的电缆接口端是否正确。
一共是LA,LB,LC三种。
在柜内线缆进口盖板上有贴其三种的输入电压范围。
③ 板卡安装 板卡主要是Linetracking卡和总线板卡 安装位置如图ProfibusLine trackingFANUC 喷涂机器人设置1.机器人的软件初始配置 进入Controlled Start方法: 在Purge完成后,purge complete灯亮,按Power按钮。
之后同时按住TP 上的[PREV]和[NEXT] 过段时间屏幕上会显示4个选项 选择第三个选项 上的[PREV]和[NEXT],过段时间屏幕上会显示4个选项。
选择第三个选项 Controlled Start,按[ENTER]进入之后显示以下Control Start界面1 F Number F 00000/j2Version:V7.5OP/12 Preject:3Engineer:FANUC Date:4Controller Number15Zone Number Zone 16Applicator Type bell(607)/GunI/O Configuation Enhanced/Standard 7Cell I/O Hardware Profibus/Module-A 8ProcessI/O Hardware Module-A (R1-R10) 9NO.of System Colors1610NO.of Color Valves16NO f C l V l1611Enable Applicator in Test Run YES12Manual function in Teach NO13Intrinsic Teach Pebdant YESUse Preset Per Job/Style NOUse Preset Per Job/StyleNo.of Preset/Color40No.of Jobs/Styles114No .of Controllers0p15Standard Operator Panel YES16Table Top Controller NO17PDEROB ID0色部分是须进行选择的几项,其中红色部分是必须进行选择的几项,其中I/O configuration 是不可更改的,在Painttool软件安装完成之后就已经固定。
喷涂机操作指南喷涂机是一种常用的涂装设备,广泛应用于建筑、汽车、航空等领域。
正确的操作喷涂机可以提高施工效率,保证工作质量,下面将为您详细介绍喷涂机的操作指南。
一、准备工作1.1 检查设备:在使用喷涂机之前,务必检查设备的各项部件是否完好,并确保连接紧密,无松动或漏气现象。
1.2 清洁喷涂区域:在喷涂前,确保喷涂区域干净整洁,并清除可能影响喷涂质量的灰尘、油渍等杂质。
1.3 配置涂料和溶剂:根据实际需要,选择合适的涂料和溶剂,并按照规定的比例进行配制。
1.4 穿戴个人防护装备:操作喷涂机时,应戴好防护眼镜、口罩、手套等个人防护装备,确保安全。
二、喷涂操作步骤2.1 调整喷涂机参数:根据涂料的性质和工作需求,适时调整喷涂机的参数,如喷嘴直径、喷涂压力、涂层厚度等。
2.2 测试喷涂效果:在实际施工之前,可以选择一个样板或试验板进行测试喷涂,以确保喷涂效果符合要求。
2.3 喷涂姿势:将喷涂机垂直于喷涂表面,始终保持与表面的适当距离,避免过远或过近造成喷涂不均匀。
2.4 喷涂方向:根据需要,可采用水平、垂直或斜向喷涂,确保喷涂覆盖均匀,避免漏涂或重涂现象。
2.5 喷涂速度:喷涂速度要控制适当,过快容易造成喷涂厚度不均匀,过慢则会影响工作效率。
2.6 喷涂间隔:根据涂料的干燥时间和施工要求,合理控制喷涂间隔,避免重喷或漏喷现象。
2.7 喷涂厚度:根据工作要求,控制喷涂涂层的厚度,避免涂层过薄或过厚影响后期工作。
三、喷涂机维护保养3.1 喷枪清洗:使用完毕后,立即将喷枪进行彻底清洗,防止涂料残留堵塞喷嘴或其他部件。
3.2 清洗过滤器:定期清洗过滤器,确保涂料中的杂质不会影响喷涂机的正常工作。
3.3 定期检查部件:定期检查喷涂机的各个部件是否磨损或老化,并及时更换或修复。
3.4 储存喷涂机:长期不使用时,应将喷涂机进行彻底清洗,并进行适当的包装和储存,以保证下次使用时的性能和质量。
综上所述,喷涂机的正确操作和维护保养是保证工作质量的重要因素。
喷涂机器人工作原理喷涂机器人是一种自动化设备,通过喷枪和涂料供给系统,可以将涂料均匀喷涂在工件表面上。
其工作原理主要包括以下几个步骤:1. 传感器检测:喷涂机器人会搭载各种传感器,如视觉传感器、力传感器等,用来检测工件的位置、形状和表面特征等信息。
这些传感器可以帮助机器人准确识别工件,并确定喷涂路径和喷涂参数。
2. 路径规划:根据传感器获取的信息,喷涂机器人会通过内置的路径规划算法计算出喷涂的最佳路径。
在路径规划过程中,机器人需要考虑工件的形状、表面曲率和喷涂遮盖率等因素,以确保喷涂效果的均匀性和一致性。
3. 运动控制:喷涂机器人根据路径规划结果进行运动控制,通过控制机器人的关节和执行器,将喷枪移动到相应的喷涂位置。
运动控制系统通常由伺服电机、编码器和运动控制器组成,可以实现高精度的位置控制和运动轨迹跟踪。
4. 涂料供给:喷涂机器人需要有稳定的涂料供给系统,通常包括涂料容器、泵和管路等组件。
机器人会根据需要,通过控制涂料供给系统实时调整涂料的流量和喷涂厚度,以满足不同工件的喷涂需求。
5. 喷涂操作:当机器人到达喷涂位置后,喷涂机器人会通过控制喷枪的喷射压力和角度等参数,将涂料喷洒到工件表面上。
机器人通常会根据预设的喷涂模式,如单向喷涂、交叉喷涂等,对工件进行连续的喷涂操作,以确保喷涂均匀而高效。
6. 质量检测:喷涂完成后,机器人会进行质量检测,检查涂层的均匀性、厚度和附着力等指标。
如果检测到异常情况,机器人可以及时进行修正或报警,以保证喷涂质量。
总的来说,喷涂机器人通过传感器检测、路径规划、运动控制、涂料供给和喷涂操作等步骤,实现了对工件的自动化喷涂,提高了喷涂效率和一致性,减少了人工操作的成本和风险。
六自由度喷涂机器人结构设计及控制共3篇六自由度喷涂机器人结构设计及控制1六自由度喷涂机器人结构设计及控制随着制造业的发展,机器人已经被广泛应用于生产线的自动化生产中。
其中,喷涂机器人是其中的一种典型应用。
而当涉及到六自由度喷涂机器人的结构设计及控制时,更需要考虑其复杂性和高精度的要求。
一、六自由度喷涂机器人结构设计1、机械结构六自由度喷涂机器人的机械结构主要包括:(1)底座、支架:底座承载整个机器人,用来支持其机械运动系统的移动;而支架则承载喷涂枪,完成喷涂操作。
(2)关节连接处:分别为底座转轴、肩部转轴、肘部转轴、腕部转轴、手部旋转轴和手部前后移动轴,用来实现机器人的六个自由度。
(3)运动机构:用来实现机械手运动的机构,其中包括减速机、电动机、蜗轮蜗杆等。
2、喷涂系统喷涂系统主要由喷涂枪、贮液桶、涂料管路和涂布机构等组成。
其核心部分是喷涂枪,通常使用喷雾型或高压喷涂型枪头,可以通过电磁阀控制气液流量来完成涂布操作。
3、控制系统机器人控制系统是机器人运作的核心,主要包括控制器、编码器、传感器、处理器等组件。
它可以实现自主控制、运动规划、轨迹控制及误差修正等功能。
二、六自由度喷涂机器人控制1、运动规划机器人的自由度有六个,因此机器人的控制需要先进行轨迹规划,确定机器人的运动轨迹。
轨迹规划通常采用树形规划、势场规划、自适应控制等算法。
2、轨迹控制机器人运动轨迹的控制是机器人完成喷涂任务的基础。
通过轨迹控制,可以根据预先设定的速度、加速度和运动方向等参数来控制机器人的运动。
轨迹控制常常采用PID控制算法、滑动模式控制算法等。
3、误差修正机器人运动过程中难免会出现机械臂的摆动、移动误差等问题。
因此,需要对机器人的运动轨迹进行精细调整,使用传感器对机器人运动误差进行实时监测,通过机器人控制器对机器人运动轨迹进行误差修正。
三、结论六自由度喷涂机器人的设计和控制都需要实现高精度和高效率。
因此,机器人控制系统的优化和控制算法的改进是机器人技术进一步发展的关键。