喷涂机器人操作方法课件
- 格式:ppt
- 大小:4.14 MB
- 文档页数:30

IRB 喷 涂 机 器 人 基 本 应 用 培 训S4P+系统上 海 ABB 工 程 有 限 公 司 2002 年 10 月 教材编号:S4P+201S4P+ IRB 喷涂机器人基本操作培训手册_____________________________________________________________________________________________________目 录1 介绍 ---------------------------------------------1 2 系统安全及环境保护---------------------------------------------2 3 综述 ---------------------------------------------4 4 启动 --------------------------------------------24 5 用窗口工作 --------------------------------------------26 6 手动操作机器人 --------------------------------------------27 7 自动生产 --------------------------------------------36 8 编程与测试 --------------------------------------------42 9 输入与输出 --------------------------------------------52 10 系统备份与冷启动 --------------------------------------------53 11 机器人保养检查表 --------------------------------------------61 附录1 安全控制链 --------------------------------------------62 附录2 定义TCP --------------------------------------------66 附录3 文件管理 --------------------------------------------68 附录4 错误排除一般步骤 -------------------------------------71在没有声明的情况下,文件中的信息会发生变化。


ABBIRC5喷涂简单操作一、教学内容本节课的教学内容选自教材《技术应用》的第四章第五节,主要介绍ABB IRB 5喷涂的简单操作。
内容包括:1. ABB IRB 5喷涂的结构及功能;2. 喷涂的操作界面及操作方法;3. 喷涂的基本操作步骤。
二、教学目标1. 让学生了解ABB IRB 5喷涂的结构及功能;2. 使学生掌握喷涂的操作界面及操作方法;3. 培养学生能够独立完成喷涂的基本操作步骤。
三、教学难点与重点重点:ABB IRB 5喷涂的结构及功能;喷涂的操作界面及操作方法;喷涂的基本操作步骤。
难点:喷涂操作界面的使用;喷涂的操作步骤的掌握。
四、教具与学具准备教具:计算机、投影仪、喷涂操作软件、喷涂。
学具:笔记本、操作手册、喷涂操作软件。
五、教学过程1. 实践情景引入:介绍喷涂在工业生产中的应用,激发学生的学习兴趣。
2. 教材内容讲解:讲解ABB IRB 5喷涂的结构及功能,喷涂的操作界面及操作方法,喷涂的基本操作步骤。
3. 例题讲解:演示喷涂的操作步骤,让学生跟随操作,巩固所学内容。
4. 随堂练习:让学生独立完成喷涂的操作步骤,教师巡回指导。
5. 板书设计:将喷涂的操作步骤写在黑板上,方便学生查阅。
6. 作业设计:题目1:绘制ABB IRB 5喷涂的结构图。
题目2:描述喷涂的操作界面及操作方法。
题目3:根据操作手册,完成喷涂的基本操作步骤。
答案:题目1:见教材第四章第五节插图。
题目2:见教材第四章第五节内容。
题目3:见教材第四章第五节操作步骤。
7. 课后反思及拓展延伸:让学生谈谈对本节课内容的理解和感想,提出改进意见;布置课后作业,要求学生独立完成喷涂的操作步骤。
六、板书设计喷涂的操作步骤:1. 启动喷涂操作系统;2. 连接喷涂与计算机;3. 打开喷涂操作软件;4. 设置喷涂工作参数;5. 启动喷涂;6. 执行喷涂任务;7. 关闭喷涂操作系统。
七、作业设计题目1:根据教材第四章第五节内容,绘制ABB IRB 5喷涂的结构图。
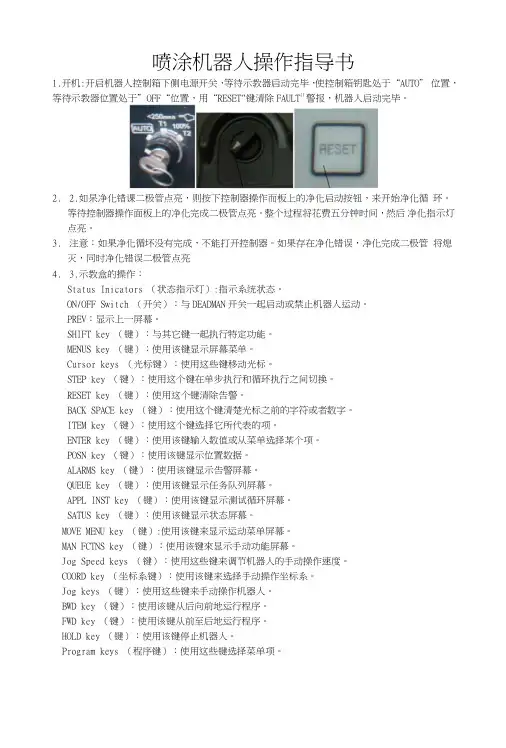
喷涂机器人操作指导书1.开机:开启机器人控制箱下侧电源开关,等待示教器启动完毕,使控制箱钥匙处于“AUTO” 位置,等待示教器位置处于”OFF“位置,用“RESET"键清除FAULT11警报,机器人启动完毕。
2. 2.如杲净化错课二极管点亮,则按下控制器操作而板上的净化启动按钮,来开始净化循环。
等待控制器操作面板上的净化完成二极管点亮。
整个过程将花费五分钟时间,然后净化指示灯点亮。
3.注意:如果净化循坏没有完成,不能打开控制器。
如果存在净化错误,净化完成二极管将熄灭,同时净化错误二极管点亮4. 3.示教盒的操作:Status Inicators (状态指示灯):指示系统状态。
ON/OFF Switch (开关):与DEADMAN开关一起启动或禁止机器人运动。
PREV:显示上一屏幕。
SHIFT key (键):与其它键一起执行特定功能。
MENUS key (键):使用该键显示屏幕菜单。
Cursor keys (光标键):使用这些键移动光标。
STEP key (键):使用这个键在单步执行和循环执行之间切换。
RESET key (键):使用这个键清除告警。
BACK SPACE key (键):使用这个键清楚光标之前的字符或者数字。
ITEM key (键):使用这个键选择它所代表的项。
ENTER key (键):使用该键输入数值或从菜单选择某个项。
POSN key (键):使用该键显示位置数据。
ALARMS key (键):使用该键显示告警屏幕。
QUEUE key (键):使用该键显示任务队列屏幕。
APPL INST key (键):使用该键显示测试循环屏幕。
SATUS key (键):使用该键显示状态屏幕。
MOVE MENU key (键):使用该键来显示运动菜单屏幕。
MAN FCTNS key (键):使用该键來显示手动功能屏幕。
Jog Speed keys (键):使用这些键来调节机器人的手动操作速度。
目录第一章安全注意事项 (7)一、注意事项 (7)二、不可使用机器人的场合 (7)三、安全操作规程 (7)1.示教和手动机器人 (7)2.生产运行 (8)第二章机器人单元的组成 (9)一、机器人 (9)1.喷涂机器人的概论 (9)2.喷涂机器人的服务行业 (10)3. 喷涂机器人的常规型号 (11)4. 控制柜常规型号 (13)5.喷涂机器人的主要参数 (16)6.喷涂机器人的编程方式 (16)7.喷涂机器人的安装环境 (16)8.喷涂机器人的特色功能 (17)9.喷涂机器人的运动 (17)10.附加轴 (17)11.喷涂机器人的安装形式 (18)二、系统软件 (19)三、控制器 (20)1.单色TP介绍 (28)2.彩色TP介绍 (29)3.TP操作键介绍 (32)五、通电/关电 (40)1.通电 (40)2.关电 (41)六、点动机器人 (42)第三章坐标系设置 (46)一、工具坐标系 (46)方法一:三点法设置 (46)方法二:六点法设置 (49)方法三:直接输入法设置 (53)激活工具坐标系: (54)检验工具坐标系: (56)二、用户坐标系 (57)方法一:三点法设置 (57)激活用户坐标系: (60)检验用户坐标系: (61)第四章程序的管理 (62)一、创建程序 (62)二、选择程序 (70)三、删除程序 (70)四、复制程序 (71)五、查看程序属性 (72)第五章指令 (73)一、编辑界面 (73)二、运动指令 (74)1. 运动指令的介绍 (74)2. 运动指令的编辑 (77)三、指令的编辑 (81)1. 插入空白行(Insert) (82)2. 删除指令行(Delete) (83)3. 复制/粘贴指令(Copy/Paste) (83)四、非运动指令 (87)1. 寄存器指令Registers (87)2. I/O(信号)指令I/O (92)3. 条件比较指令IF (93)4. 条件选择指令SELECT (94)5. 等待指令WAIT (95)6. 跳转/标签指令JMP/LBL (96)7. 呼叫指令CALL (97)8. 偏移条件指令OFFSET (97)9. 工具坐标系调用指令UTOOL_NUM (99)10. 用户坐标系调用指令UFRAME_NUM (100)11. 其他指令 (101)五、喷涂指令 (103)1. 喷枪指令:Gun = [ ] (103)2. 喷枪选择指令:GunSel [ ] (104)3. 喷漆参数预设置指令:Preset [ ] (106)4. 静电指令:ElectroStat [ ] (107)六、手动控制喷涂 (109)七、测试周期 (110)第六章执行程序 (112)一、程序的启动方式 (112)1. TP启动方式一:顺序单步执行(在模式开关为T1/T2条件下进行) (112)2. TP启动方式二:顺序连续执行(在模式开关为T1/T2条件下进行) (113)3. TP启动方式三:逆序单步执行(在模式开关为T1/T2条件下进行) (113)二、中断程序的执行 (114)1. 人为中断程序的方法 (114)2. 报警引起的程序中断 (115)三、恢复程序的执行 (116)第七章喷涂参数设置 (118)一、设置颜色信息 (118)二、设置颜色改变周期 (123)三、定义预置 (126)四、定义静电预置 (128)五、PCE(P ROCESS C ONTROL E NCLOSURE)介绍 (130)1. PCE的功能 (130)2. PCE的构成: (132)3. PCE与机器人的关系 (133)4. PCE的操作 (134)5. 注意事项 (135)第八章信号 (136)一、信号的分类 (136)二、信号控制: (136)1.配置 (136)2.强制输出 (138)3.仿真输入/输出 (139)三、信号介绍 (140)1. Standard I/O (140)2. Enhance I/O (144)第九章基准点,宏 (148)一、基准点R EF P OSITION (148)1. Ref Position 概述 (148)2. 设置Ref Position点 (148)二、宏MACRO (152)1. 概述 (152)2. 设置宏指令 (152)3. 执行宏指令 (154)第十章自动运行 (156)一、自动运行方式:JOB-BIN (156)1. 自动运行的执行条件 (156)2. 程序的命名要求及设置步骤: (157)二、自动运行方式:INITSEQ (161)1. 自动运行的执行条件 (161)2. 自动运行涉及的信号: (162)3. 程序命名要求: (162)4. 时序图 (163)第十一章备份/加载 (164)一、文件的备份/加载设备 (164)二、文件类型 (164)三、备份/加载方法的异同点 (166)四、备份/加载的应用 (166)五、备份/加载方法的介绍 (167)1.一般模式下的备份/加载 (167)2.控制启动(Controlled Start)模式下的备份/加载 (175)3.Boot Monitor模式下的备份与加载 (181)第十二章零点复归(MASTERING) (185)一、零点复归(M ASTERING)介绍 (185)二、零点复归(M ASTERING)的方法 (187)1. FIXTURE POSITION MASTER(专门夹具核对方式) (187)2. SINGLE AXIS MASTER (单轴核对方式) (199)3. Quick Mastering (快速核对方式) (200)二、相关故障的消除 (202)1. 消除 SRVO - 062 报警,恢复机器人正常运作 (203)2. 消除 SRVO - 038 报警,恢复机器人正常运作 (205)第十三章基本保养 (207)一、概述 (207)二、更换电池 (208)1. 更换控制器主板上的电池 (208)2. 更换机器人本体上的电池 (208)三、更换润滑油 (209)1. 更换减速器和齿轮盒润滑油 (209)第十四章机器人易耗品介绍 (222)一、机器人本体电池及润滑油 (222)二、机器人控制柜电池及保险丝 (224)第一章安全注意事项一、注意事项1.FANUC机器人所有者、操作者必须对自己的安全负责。
目录第一章安全注意事项 (7)一、注意事项 (7)二、不可使用机器人的场合 (7)三、安全操作规程 (7)1.示教和手动机器人 (7)2.生产运行 (8)第二章机器人单元的组成 (9)一、机器人 (9)1.喷涂机器人的概论 (9)2.喷涂机器人的服务行业 (10)3. 喷涂机器人的常规型号 (11)4. 控制柜常规型号 (13)5.喷涂机器人的主要参数 (16)6.喷涂机器人的编程方式 (16)7.喷涂机器人的安装环境 (16)8.喷涂机器人的特色功能 (17)9.喷涂机器人的运动 (17)10.附加轴 (17)11.喷涂机器人的安装形式 (18)二、系统软件 (19)三、控制器 (20)1.单色TP介绍 (28)2.彩色TP介绍 (29)3.TP操作键介绍 (32)五、通电/关电 (40)1.通电 (40)2.关电 (41)六、点动机器人 (42)第三章坐标系设置 (46)一、工具坐标系 (46)方法一:三点法设置 (46)方法二:六点法设置 (49)方法三:直接输入法设置 (53)激活工具坐标系: (54)检验工具坐标系: (56)二、用户坐标系 (57)方法一:三点法设置 (57)激活用户坐标系: (60)检验用户坐标系: (61)第四章程序的管理 (62)一、创建程序 (62)二、选择程序 (70)三、删除程序 (70)四、复制程序 (71)五、查看程序属性 (72)第五章指令 (73)一、编辑界面 (73)二、运动指令 (74)1. 运动指令的介绍 (74)2. 运动指令的编辑 (77)三、指令的编辑 (81)1. 插入空白行(Insert) (82)2. 删除指令行(Delete) (83)3. 复制/粘贴指令(Copy/Paste) (83)四、非运动指令 (87)1. 寄存器指令Registers (87)2. I/O(信号)指令I/O (92)3. 条件比较指令IF (93)4. 条件选择指令SELECT (94)5. 等待指令WAIT (95)6. 跳转/标签指令JMP/LBL (96)7. 呼叫指令CALL (97)8. 偏移条件指令OFFSET (97)9. 工具坐标系调用指令UTOOL_NUM (99)10. 用户坐标系调用指令UFRAME_NUM (100)11. 其他指令 (101)五、喷涂指令 (103)1. 喷枪指令:Gun = [ ] (103)2. 喷枪选择指令:GunSel [ ] (104)3. 喷漆参数预设置指令:Preset [ ] (106)4. 静电指令:ElectroStat [ ] (107)六、手动控制喷涂 (109)七、测试周期 (110)第六章执行程序 (112)一、程序的启动方式 (112)1. TP启动方式一:顺序单步执行(在模式开关为T1/T2条件下进行) (112)2. TP启动方式二:顺序连续执行(在模式开关为T1/T2条件下进行) (113)3. TP启动方式三:逆序单步执行(在模式开关为T1/T2条件下进行) (113)二、中断程序的执行 (114)1. 人为中断程序的方法 (114)2. 报警引起的程序中断 (115)三、恢复程序的执行 (116)第七章喷涂参数设置 (118)一、设置颜色信息 (118)二、设置颜色改变周期 (123)三、定义预置 (126)四、定义静电预置 (128)五、PCE(P ROCESS C ONTROL E NCLOSURE)介绍 (130)1. PCE的功能 (130)2. PCE的构成: (132)3. PCE与机器人的关系 (133)4. PCE的操作 (134)5. 注意事项 (135)第八章信号 (136)一、信号的分类 (136)二、信号控制: (136)1.配置 (136)2.强制输出 (138)3.仿真输入/输出 (139)三、信号介绍 (140)1. Standard I/O (140)2. Enhance I/O (144)第九章基准点,宏 (148)一、基准点R EF P OSITION (148)1. Ref Position 概述 (148)2. 设置Ref Position点 (148)二、宏MACRO (152)1. 概述 (152)2. 设置宏指令 (152)3. 执行宏指令 (154)第十章自动运行 (156)一、自动运行方式:JOB-BIN (156)1. 自动运行的执行条件 (156)2. 程序的命名要求及设置步骤: (157)二、自动运行方式:INITSEQ (161)1. 自动运行的执行条件 (161)2. 自动运行涉及的信号: (162)3. 程序命名要求: (162)4. 时序图 (163)第十一章备份/加载 (164)一、文件的备份/加载设备 (164)二、文件类型 (164)三、备份/加载方法的异同点 (166)四、备份/加载的应用 (166)五、备份/加载方法的介绍 (167)1.一般模式下的备份/加载 (167)2.控制启动(Controlled Start)模式下的备份/加载 (175)3.Boot Monitor模式下的备份与加载 (181)第十二章零点复归(MASTERING) (185)一、零点复归(M ASTERING)介绍 (185)二、零点复归(M ASTERING)的方法 (187)1. FIXTURE POSITION MASTER(专门夹具核对方式) (187)2. SINGLE AXIS MASTER (单轴核对方式) (199)3. Quick Mastering (快速核对方式) (200)二、相关故障的消除 (202)1. 消除 SRVO - 062 报警,恢复机器人正常运作 (203)2. 消除 SRVO - 038 报警,恢复机器人正常运作 (205)第十三章基本保养 (207)一、概述 (207)二、更换电池 (208)1. 更换控制器主板上的电池 (208)2. 更换机器人本体上的电池 (208)三、更换润滑油 (209)1. 更换减速器和齿轮盒润滑油 (209)第十四章机器人易耗品介绍 (222)一、机器人本体电池及润滑油 (222)二、机器人控制柜电池及保险丝 (224)第一章安全注意事项一、注意事项1.FANUC机器人所有者、操作者必须对自己的安全负责。
涂装机器人的操作方法涂装机器人是一种高速、高效、高质量的涂装设备,可以适用于各种类型的涂装工艺,如流线型自动涂装工艺、喷雾涂装工艺和粉末涂装工艺等。
涂装机器人的操作方法包括以下几个方面:一、安全操作涂装机器人在运行时需要严格遵守安全操作规程,防止发生意外事故。
操作人员应该穿戴好防护装备,如口罩、眼镜、手套、防护服等。
应该确保设备周围没有障碍物和人员,同时要开展好相应的应急预案,以便在发生意外时能够及时进行救援。
二、机器人选型在进行涂装机器人操作之前,需要选型适合自己工艺需求的机器人。
机器人的重要参数包括工作负载、轴数、重复定位精度和工作速度等。
一般来说,涂装机器人需要满足以下要求:重复定位精度高、操作速度快、适应性强、节能环保等。
三、预处理在进行涂装操作前,需要对被涂装的物体进行预处理,如酸洗处理、防腐处理、砂光处理等。
这些预处理工作可以确保被涂装的物体表面清洁、平整、光滑,从而提高涂装的质量。
四、编程操作机器人编程是涂装机器人操作的核心内容之一,需要具备一定的编程技能和专业知识。
编程的目的是设置机器人的运动轨迹、速度和涂装参数等。
在编程操作过程中,要注意保护机器人和周边物体,确保安全。
五、操作维护涂装机器人需要进行常规的操作维护工作,以提高设备的使用寿命和性能。
操作维护包括重点清洁、保养涂装枪、检查电缆和接头、检查传感器的功能等。
如果发现设备出现异常,应该及时向维修人员报告,维修并更新设备问题。
综上所述,涂装机器人操作方法包括安全操作、机器人选型、预处理、编程和操作维护等,这些操作流程的执行需要具备专业的技术和严格的操作规程。
只有保持持续的关注,才能够实现涂装机器人操作的高效性和稳定性,提高涂装效率和质量。