函数简化为:
S
驶
仪,
e
可消除静
Me (S Z* )
差
S 2 C1d S C2d
ef
1
M I
* y
M
e
ef
。1
S
K
系统g工=0作时在,稳e 定 L状 态 将,上 式0两则t 边积e 分 K,iK且 令(初g 始条) 当件指令0 输0 入
则 e (t) L ( )d
即:升降舵偏角与俯仰角偏0差的积分成比例,当系统进入稳 态后,靠Δ的积分去提供舵偏角,从而消除俯仰角的静差。
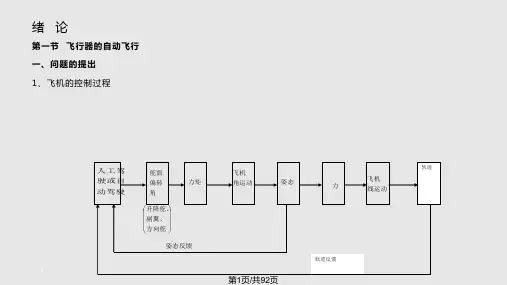
• 工作原理:
当飞机在进行等速水平直线飞行状态时,受到紊流干扰
后,出现俯仰角偏差=-00,假定初始俯仰角0=0,
则垂直陀螺仪测出俯仰角偏差后,输出电压信号K1。
如 按
果照外控加制控规制律信驱号动升U降舵g=向0,下则偏通转过信e=号K
综 K
合与舵回路后, 10,使飞机
产生低头力矩,减小俯仰角偏差,最后实现姿态保持
第16页/共84页
当自动驾驶仪参与工作后,舵面偏转Δδz对方程
的影响: I y Cmq Cm Cme e
e L L A/P
A/
稳
P
阻
阻
尼
尼
力
作
矩
用
稳
定
定
作
力
用
矩
I y (Cmq Cme L ) (Cm Cme L ) 0
第17页/共84页
5.4.1 姿态控制系统的构成与工作原理
• (4)一阶微分信号在比例 式控制规律中的作用
Δ
t1 t2
t3
为了抑制振荡,在 控制律中 0
t
引入俯仰角速度 ,对飞机 Δe