曲面曲率计算方法的比较与分析
- 格式:doc
- 大小:624.00 KB
- 文档页数:10

研究生专业课程报告题目:曲面曲率直接计算方法的比较学院:信息学院课程名称:三维可视化技术任课教师:****名:***学号:*********西北大学研究生处制曲面曲率直接计算方法的比较1、摘要曲面曲率的计算是图形学的一个重要内容,一般来说,曲面的一阶微分量是指曲面的切平面方向和法向量,二阶微分量是指曲面的曲率等有关量.它们作为重要的曲面信息度量指标, 在计算机图形学, 机器人视觉和计算机辅助设计等领域发挥了重要的作用.此文对曲面上主曲率的2种直接估算方法(网格直接计算法和点云直接计算法)进行了论述, 并进行了系统的总结与实验, 并给出了其在颅像重合方面的应用。
关键词曲面曲率、主曲率、点云、三角网格2、引言传统的曲面是连续形式的参数曲面和隐式曲面, 其微分量的计算已经有了较完备的方法.随着激光测距扫描等三维数据采样技术和硬件设备的长足进步, 以及图形工业对任意拓扑结构光滑曲面造型的需求日益迫切, 离散形式的曲面———细分曲面、网格曲面和点云曲面正在逐渐成为计算机图形学和几何设计领域的新宠.于是, 对这种离散形式的曲面如何估算微分量, 就成为一个紧迫的课题。
CT扫描技术获得的原始点云和网格数据通常只包含物体表面的空间三维坐标信息及其三维网格信息,没有明确的几何信息,而在点云和网格的简化、建模、去噪、特征提取等数据处理和模式识别中,常需要提前获知各点的几何信息,如点的曲率、法向量等,也正基于此,点云和网格的几何信息提取算法一直是研究的热点。
点的法向量和曲率通常采用离散曲面的微分几何理论来计算,由于离散曲面分为网格和点集两种形式,其法向量和曲率计算也分为两类: 一类是基于网格的法向量和曲率计算,另一类是基于散点的法向量和曲率计算。
由于基于三角网的点云几何信息计算精度一般比较低,通常采用直接计算法。
在点云几何信息提取中,常采用基于散乱点的点云几何信息计算方法,该类方法主要是通过直接计算法和最小二乘拟合算法获取点云的局部n 次曲面,然后根据曲面的第一基本形式和第二基本形式求解高斯曲率和平均曲率,而点云的局部曲面表示有两种: 一是基于法向距离的局部曲面表示,二是基于欧几里德距离的局部曲面表示。

牛顿环测透镜曲率半径实验中的数据处理与结果分析实验目的牛顿环测透镜曲率半径实验是用来测量透镜的曲率半径的方法之一。
通过实验,我们可以获得透镜的曲率半径,并进一步了解透镜的性质和特点。
本文旨在介绍牛顿环测透镜曲率半径实验中的数据处理方法和结果分析。
实验原理牛顿环实验是基于干涉原理来测量透镜曲率半径的。
光源照射到透镜表面上,形成由干涉引起的环状亮暗条纹。
当透镜与平行玻璃片叠加时,亮暗条纹的半径与透镜的曲率半径有关。
通过测量亮暗条纹的半径,可以计算出透镜的曲率半径。
实验步骤1. 将光源置于光学台上,并调节好透镜的位置;2. 在光源的下方放置一张玻璃平板作为参考面;3. 将透镜放置在平板上,并调整透镜的位置,使其与平板平行;4. 调节望远镜的位置和焦距,使其能够清楚地观察到牛顿环;5. 使用望远镜观察牛顿环,并通过微调透镜位置,使得环形条纹清晰;6. 测量不同环圆的直径,记录数据。
数据处理根据实验原理,并结合实验步骤中所测量的数据,我们可以进行如下的数据处理:1. 对每个环圆的直径进行测量,并记录下来;2. 计算每个环圆的半径,即直径的一半;3. 利用公式r = (m-0.5)\*λR/d,其中r为透镜曲率半径,m为环数,λ为光波长,R为透镜与平板的距离,d为环圆半径;4. 将上述的计算结果整理为一个数据表或图表,便于结果的分析和比较。
结果分析通过实验数据的处理,我们可以得到透镜的曲率半径。
根据实验中测量得到的环圆半径以及上述的计算公式,我们可以计算出透镜的曲率半径并进行结果的分析。
1. 分析透镜的曲率半径的大小和正负:通过对计算得出的曲率半径进行分析,可以确定透镜是凸透镜还是凹透镜,并判断其曲率半径的大小。
2. 分析透镜的焦距:根据透镜的曲率半径,我们可以利用透镜的透镜公式来计算透镜的焦距,进一步了解透镜的性质和特点。
3. 比较不同环数的曲率半径:将不同环数对应的曲率半径进行比较,可以研究曲率半径与环数之间的关系,进一步加深对透镜性质的理解。

高精度曲率分析方法探究卢昕;熊晓军;吕姗姗;贺振华【摘要】曲率属性对于裂缝检测、断层解释储层检测有很好的实用价值.曲率与层面的二阶导数密切相关,常规方法是在计算曲率前对层面进行适当的二维滤波预处理,但其对一些信噪比较差的地震资料的处理效果不佳.为解决这类问题,采用了先计算曲率后进行二维滤波的方法,使研究对象数据与周围数据差异很小的地震资料得到了很好的处理效果,对曲率属性分析的应用,断层解释及开展储层检测有一定的实际应用价值.【期刊名称】《重庆科技学院学报(自然科学版)》【年(卷),期】2014(016)003【总页数】5页(P75-78,134)【关键词】中值滤波;高精度曲率;断层识别【作者】卢昕;熊晓军;吕姗姗;贺振华【作者单位】成都理工大学地球探测与信息技术教育部重点实验室,成都610059;成都理工大学地球探测与信息技术教育部重点实验室,成都610059;成都理工大学地球探测与信息技术教育部重点实验室,成都610059;成都理工大学地球探测与信息技术教育部重点实验室,成都610059【正文语种】中文【中图分类】TE122.2+4在油气勘探中,断层解释是整个构造解释的关键,断层解释的精确性和合理性直接影响着构造成果的精度,常规的断层识别方法对于小断层或品质较差的地震资料的检测效果不甚理想[1]。
曲率属性包括一维属性及二维属性,一维属性对于复杂地质构造缺乏检测能力,二维属性是以二元偏导数为基础的曲面曲率属性,Roberts[2]给出了二维属性的详细分类及计算公式;休斯顿大学应用物理实验室的Marfurt等人在Roberts研究的基础上推广到了沿层曲率属性的提取,并应用多尺度(分波数)分析,将地震属性解释带入了新的领域。
由于曲率与层面的二阶导数密切相关,因此它的品质对噪声相当敏感。
在绘制的层面上噪声源很多,例如地质、处理、采集和层位自动追踪处理等。
因此常规的方法是在计算曲率前对层面进行适当的二维滤波预处理。

曲率半径的概念曲率半径是描述一个曲面或曲线的形状的物理量。
它指的是在一个给定点上,曲面或曲线在该点处的弯曲程度。
简单地说,曲率半径就是曲面或曲线在一个点上的半径,这个半径是构成这个曲面或曲线时所需的圆的半径。
在几何学上,曲率半径是在曲面或曲线上的法线上,经过该点,并具有相同切线方向和切线方向的垂线长度的倒数。
这个长度就是曲率半径。
因此,曲率半径是一个表示曲线或曲面在某个点上的弯曲程度的量,也是一个表示曲线或曲面在某个点上的曲率大小的量。
为了更好地理解曲率半径的概念,可以比较直线和圆的情况。
在直线上,曲率半径是无限大的,因为直线在任何一个点上都没有弯曲。
而在圆上,曲率半径等于圆的半径,因为圆的每个点都具有相同的弯曲半径和半径大小。
曲率半径在物理学和工程学中具有广泛的应用。
例如,在机械设计中,曲率半径通常用来描述机械零件的弯曲程度和曲线形状。
在光学中,折射率和曲率半径通常用来描述透镜的形状。
在物理学中,曲率半径通常用来描述曲面的形状和反射性质。
曲率半径也是计算曲线或曲面的曲率的重要参量。
曲率是描述曲面或曲线在某个点上的弯曲程度的物理量。
计算曲率的方法是通过比较曲面或曲线的小段弧长和相应段的曲率半径大小来确定。
因此,曲率半径是曲率计算的重要输入参数。
曲率半径的概念还可以应用于处理曲线或曲面的形状数据。
曲率半径可以用来表征数字三维曲面模型和图像数据的特征,例如,在医学成像和地质勘探中,曲率半径通常用来提取数据中的重要特征和构造几何模型。
在工程领域中,曲率半径的概念也是非常重要的。
当模拟各种机械结构和工作装置的强度和稳定性时,曲率半径的变化可以导致应力分布和失稳的发生。
在汽车设计和制造中,曲率半径也是非常重要的因素。
例如在车身设计中,曲率半径需要根据车身部件的弯曲程度来设置,以确保车身的结构强度和稳定性。
总之,曲率半径是一个重要的物理量,它可以用来描述曲面或曲线的形状和曲率。
它在物理学、工程学和计算机图形学等领域中都有着广泛的应用。
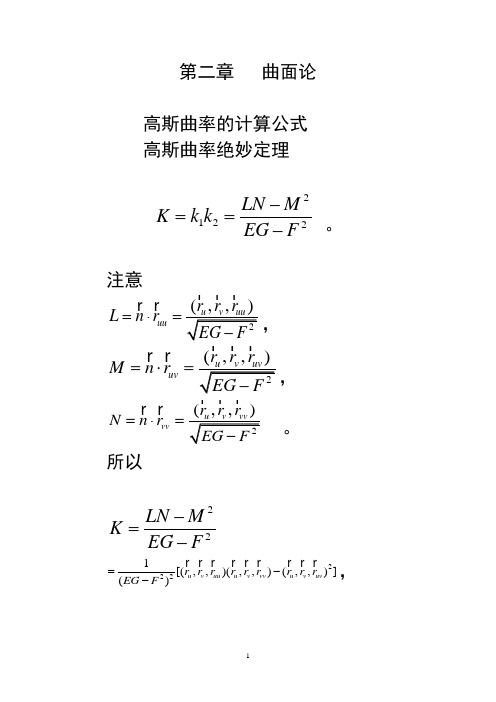
第二章 曲面论高斯曲率的计算公式 高斯曲率绝妙定理2122LN MK k k EG F-==- 。
注意(,,)uu r r r L n r =⋅=r r r r r ,(,,)uv r r r M n r =⋅=r r ,(,,)vv r r r N n r =⋅=r r 。
所以22LN M K EG F -=-2221[(,,)(,,)(,,)]()u v uu u v vv u v uv r r r r r r r r r EG F =--r r r r r r r r r ,利用行列式的转置性质和矩阵乘法性质,得2(,,)(,,)(,,)u v uu u v vv u v uv r r r r r r r r r -r r r r r r r r r(,,)(,,)u u v u v vv v u v uv uu uv r r r r r r r r r r r r⎛⎫⎛⎫ ⎪ ⎪=- ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭r r r r r r r r r r r r u u u v u vv u u u v u uv v uv v v vv v u v v v uv uu uuu vuu vv uv uuv vuv uvr r r r r r r r r r r r r r r r r r r r r r r r r r r r r r r r r r r r ⋅⋅⋅⋅⋅⋅=⋅⋅⋅-⋅⋅⋅⋅⋅⋅⋅⋅⋅r r r r r r r r r r r r r r r r r r r r r r r r r r r r r r r r r r r ru vv u uv v vv v uv uu u uu v uu vv uv uuv v uv uvE F r r E F r r FGr r F Gr r r r r r r r r r r r r r ⋅⋅=⋅-⋅⋅⋅⋅⋅⋅⋅r r r r r rr r r r r r r r r r r r r ru vv u uv v vv v uv uu u uu v uu vv uv uv uv uuv v E F r r E F r r FGr r F Gr r r r r r r r r r r r r r ⋅⋅=⋅-⋅⋅⋅⋅-⋅⋅⋅r r r r r r r r r r r r r r r r r r r r ,(其中用到行列式按第三行展开计算的性质。
高斯曲率、法曲率、测地曲率的关系
高斯曲率、法曲率和测地曲率是描述曲面几何性质的重要概念,它们之间存在着密切的关系。
首先,我们来看高斯曲率。
高斯曲率是描述曲面曲率的一个重
要指标,它表示了曲面在某一点处的曲率大小。
具体而言,高斯曲
率可以通过曲面上的测地线的角度变化来描述。
高斯曲率可以用于
判断曲面的性质,比如在高斯曲率为正的点附近,曲面呈现出“凸”的性质,而在高斯曲率为负的点附近,曲面呈现出“凹”的性质。
接下来是法曲率。
法曲率是描述曲面上曲线弯曲程度的一个概念。
在曲面上的任意一点,都存在无数个方向,而法曲率就是描述
了曲面在某一点上沿着某一方向的曲线的弯曲程度。
法曲率与曲面
的法向量和曲线的曲率之间存在着密切的联系。
最后是测地曲率。
测地曲率描述了曲面上的测地线的弯曲程度。
测地线是曲面上的一种特殊的曲线,沿着这样的曲线运动的物体在
没有外力作用下会保持匀速直线运动。
测地曲率可以用来描述曲面
的内禀几何性质,比如在测地曲率为零的曲面上,测地线是直线。
这三个概念之间的关系可以通过曲面的基本方程来描述。
具体而言,高斯曲率、法曲率和测地曲率之间存在着一定的数学关系,可以通过曲面的度量张量和克氏符来表达。
这些关系在微分几何和曲面理论中有着重要的应用,可以帮助我们理解曲面的几何性质和物理特性。
综上所述,高斯曲率、法曲率和测地曲率是描述曲面几何性质的重要概念,它们之间存在着密切的关系,通过这些概念我们可以更深入地理解曲面的几何性质和物理特性。
解析几何中的曲率和法向量在解析几何中,曲率和法向量是两个非常重要的概念。
曲率可以揭示出物体或曲线的弯曲程度,而法向量则可以帮助我们理解物体或曲线的朝向。
这两个概念在计算机图形学,物理学,机器学习以及工程学等领域中都有广泛的应用。
本文将着重介绍曲率和法向量在解析几何中的定义、计算方法以及应用。
1. 曲率曲率是曲线或曲面在某点上的弯曲程度的量度。
在解析几何中,我们可以用向量算法或者微积分算法来计算曲率。
1.1 向量算法设一个向量函数r(t)(t表示参数),r''(t)表示r(t)的二阶导数,那么r''(t)即表示曲线的曲率向量。
曲率向量的模长即是曲率的大小。
假设一个曲线在某点上的曲率向量为k,那么该曲线在该点上的曲率即为k的模长。
我们可以用下面的公式来计算曲率的大小:k=||r''(t)||/||r'(t)||^31.2 微积分算法如果给定曲线的参数方程r(t)=(x(t), y(t), z(t)),那么曲线上的某一点就可以表示为(r(t0), t0)。
曲线在该点的曲率可以用下面的公式来计算:k(t0)=|(x''(t0)y'(t0)-x'(t0)y''(t0))/((x'(t0)^2+y'(t0)^2)^{3/2})|2. 法向量法向量用来表示曲面在某一点上的垂直方向。
我们可以用两种方法来计算法向量:基于向量的方法和基于微积分的方法。
2.1 基于向量的方法设一个曲面的方程为f(x,y,z)=0。
在该曲面上的某一点P处,曲面的法向量是该点处的梯度向量。
梯度向量指向函数上升最快的方向,所以在曲面上梯度向量的方向即是法向量的方向。
我们可以用下面的公式来计算曲面在该点的法向量:N=(-fx, -fy, 1)/sqrt(fx^2+fy^2+1^2)其中fx,fy,fz分别表示f(x,y,z)对x,y,z的偏导数。
犀牛衔接曲面曲率的要求
在工程设计和制造中,曲面的设计和加工是一个非常重要的环节。
曲面的质量直接影响着产品的外观和性能。
而在曲面设计和加
工过程中,曲率是一个非常关键的参数,它直接影响着曲面的光滑
度和精度。
犀牛衔接曲面曲率的要求,意味着在设计和制造曲面时需要考
虑曲率的连续性和变化。
曲率的连续性要求曲面上相邻曲线段的曲
率在连接处连续,没有明显的跳跃或突变。
这样可以保证曲面在视
觉上是光滑的,没有明显的瑕疵。
曲率的变化则要求曲面上的曲率
变化要符合设计要求,能够满足产品的功能和外观需求。
在实际的工程设计和制造中,犀牛衔接曲面曲率的要求需要通
过数学建模和CAD软件来实现。
设计师需要根据产品的要求和功能,合理地设置曲面的曲率参数,同时通过CAD软件来进行曲面的建模
和优化。
制造工程师则需要根据设计要求,选择合适的加工工艺和
设备,确保曲面的加工精度和质量。
总之,犀牛衔接曲面曲率的要求是工程设计和制造中的重要环节,它直接影响着产品的外观和性能。
设计师和制造工程师需要密
切合作,通过科学的方法和技术手段,确保曲面的曲率满足产品的要求,从而生产出高质量的产品。
解析几何中的曲线与曲面在数学的几何学中,曲线和曲面算是比较基本的概念。
它们分别是二维和三维空间中的图形,而在解析几何中,这两个概念被用于描述函数和方程。
本文将对解析几何中曲线和曲面的定义、性质、分类和应用进行介绍和分析。
一、曲线的定义和性质在二维空间中,曲线被定义为一条连续的、有限的、平面上的线段。
而在三维空间中,曲线也被定义为一条连续的、有限的、在空间中的线段。
曲线的性质通常包括弧长、曲率和切线等。
1、弧长弧长是曲线上两点之间的距离之和,也可以被认为是曲线的长度。
在二维和三维空间中,根据弧长的计算,曲线可以被分为直线和曲线两类。
弧长可以表示为:2、曲率曲率是描述曲线弯曲程度的参数。
简单地说,曲率越大,曲线越弯曲。
曲率可以用以下公式计算:其中,r为曲率半径。
3、切线切线是曲线在任意一点处的切线。
切线的方向和曲线在该点处的切线方向一致。
在二维空间中,曲线的切线可以用导数表示。
在三维空间中,曲线的切线可以用切向量表示。
二、曲线的分类在解析几何中,曲线按照其方程和性质可以被分为多种类型,包括直线、圆、椭圆、抛物线、双曲线等。
以下分别对这些类型进行介绍。
1、直线直线是最简单最基本的曲线,由无数个点组成。
直线的方程一般为y=ax+b或y=kx,其中a、b、k均为实数。
2、圆圆是平面内到给定点距离相等的所有点的集合。
图像是一个半径为r的圆心为(a,b)的圆。
圆的方程可以表示为(x-a)²+(y-b)²=r²。
3、椭圆椭圆是平面内到两个给定点距离之和为常数的所有点的集合。
图像呈现为一个狭长的圆形,由两个焦点确定。
椭圆的方程可以表示为(x/a)² + (y/b)² = 1。
4、抛物线抛物线是一种二次曲线,由平面上各点到定点距离与各点到定直线距离的差的平方成正比的轨迹。
抛物线图像特征是平面上一个开口朝上或朝下的弧形。
抛物线的方程可以表示为y=ax² + bx+c。
.研究生专业课程报告题目:曲面曲率直接计算方法的比较学院:信息学院课程名称:三维可视化技术任课教师:刘晓宁姓名:朱丽品学号: 201520973西北大学研究生处制曲面曲率直接计算方法的比较1、摘要曲面曲率的计算是图形学的一个重要内容,一般来说,曲面的一阶微分量是指曲面的切平面方向和法向量,二阶微分量是指曲面的曲率等有关量.它们作为重要的曲面信息度量指标, 在计算机图形学, 机器人视觉和计算机辅助设计等领域发挥了重要的作用.此文对曲面上主曲率的2种直接估算方法(网格直接计算法和点云直接计算法)进行了论述, 并进行了系统的总结与实验, 并给出了其在颅像重合方面的应用。
关键词曲面曲率、主曲率、点云、三角网格2、引言传统的曲面是连续形式的参数曲面和隐式曲面, 其微分量的计算已经有了较完备的方法.随着激光测距扫描等三维数据采样技术和硬件设备的长足进步, 以及图形工业对任意拓扑结构光滑曲面造型的需求日益迫切, 离散形式的曲面———细分曲面、网格曲面和点云曲面正在逐渐成为计算机图形学和几何设计领域的新宠.于是, 对这种离散形式的曲面如何估算微分量, 就成为一个紧迫的课题。
CT扫描技术获得的原始点云和网格数据通常只包含物体表面的空间三维坐标信息及其三维网格信息,没有明确的几何信息,而在点云和网格的简化、建模、去噪、特征提取等数据处理和模式识别中,常需要提前获知各点的几何信息,如点的曲率、法向量等,也正基于此,点云和网格的几何信息提取算法一直是研究的热点。
点的法向量和曲率通常采用离散曲面的微分几何理论来计算,由于离散曲面分为网格和点集两种形式,其法向量和曲率计算也分为两类: 一类是基于网格的法向量和曲率计算,另一类是基于散点的法向量和曲率计算。
由于基于三角网的点云几何信息计算精度一般比较低,通常采用直接计算法。
在点云几何信息提取中,常采用基于散乱点的点云几何信息计算方法,该类方法主要是通过直接计算法和最小二乘拟合算法获取点云的局部n 次曲面,然后根据曲面的第一基本形式和第二基本形式求解高斯曲率和平均曲率,而点云的局部曲面表示有两种: 一是基于法向距离的局部曲面表示,二是基于欧几里德距离的局部曲面表示。
本节中针对近几年来国际上提出的对三角网格曲面估算离散曲率的直接估算法,从数学思想与表达形式等方面进行系统的归纳与总结.3、三角网格曲面的曲率的计算及代码实现为了叙述清楚起见, 引入统一的记号.k 1和k 2表示主曲率,曲面的主曲率即过曲面上某个点具有无穷个曲线,也就存在无穷个曲率(法曲率),其中存在一条曲线使得该曲线的曲率为极大,这个曲率为极大值k 1,垂直于极大曲率面的曲率为极小值k 2。
这两个曲率的属性为主曲率。
它们代表着法曲率的极值。
主曲率是法曲率的最大值和最小值。
H 表示平均曲率,是空间上曲面上某一点任意两个相互垂直的正交曲率的平均值。
如果一组相互垂直的正交曲率可表示为K 1、K 2,那么平均曲率则为:H= (K 1 +K 2 ) / 2。
K 表示曲面的高斯曲率, 两个主曲率的乘积即为高斯曲率,又称总曲率,反映某点上总的完全程度。
K=k 1*k 2。
N fk表示法曲率, n 表示法向量.考虑三角网格的顶点V i。
(1)曲面三角网格的表示形式给一个三维曲面,如下图所示,如果用文本形式将其打开,则是由两部分组成,第一部分以v开头是三维的点,第二部分以f开头是三个点组成的面三角形。
(2)三角网格模型曲率计算---直接计算第一步:估计给定点的法向量三角网格模型一般情况下可以由一对线性表表示,M=(V,F);其中V={v i:1<=i<=n v}表示顶点集,F={f K:1<=k<=n f}表示三角片集。
如下图所示:各个三角片的法向量的计算,在计算以v i为公共顶点的法向量时,由于后面的计算要取其平均值,故必须保证法向量方向的一致性,在这里要用到了数学上的右手法则或者左手法则,即与v i相邻的点形成一个三维的封闭的圈,按照右手法则给其线段标注方向,如下图所示。
三角面片f k 的法向量N fk 的计算公式如下:N fk=(v i-v j+1)*(v j+1-v j)/||(v i-v j+1)*(v j+1-v j)||;我们称1-环邻域是与点v i相邻的三角形集合。
图中除顶点v i外其它顶点组成的集合记为V i。
如果顶点v j属于V i,则v j是v i的相邻点。
V i中顶点的个数称为其顶点的度,记为|N(i)|。
包含v i的三角形片集合记为F i。
如果三角形片记f k属于F i。
记为f k∈F i。
记|f k|为三角形片的面积。
包含点v i的三角片的面积之和记为N(v i)。
离散三角网格上法向量和法曲率也有一般的定义方法,这些几何量估算的准确度对高斯曲率和平均曲率的准确度影响很大。
对于离散三角网格曲面M=(V,F),任意点v i的法向量一般可定义为1-环三角形某些几何量的加权和。
最简单的加权方法为1-环三角形的法向量平均值,定义如下:对于三角网格上任意点v i,法曲率通常使用公式第二步:计算法曲率,得到两个主曲率K 1和K 2对于三角网格上任意点v i,法曲率通常使用公式第三步:计算高斯曲率和平均曲率K=K 1*K 2H=(K 1+K 2)/2实现代码见附件4、点云曲面的曲率的计算及代码实现(1)点云简介点云(Cloud Points)是由很多单个的点组成的集合。
点是最简单、最基本的几何定义实体。
记录了模型表面离散点上的各种物理信息,例如模型表面离散点的三维位置坐标、大小、法向量、颜色、透明度、纹理特征等。
用点云表示的颅骨如下图所示:(2)点云模型曲率计算---直接计算1)选取当前的点P i ‘(x,y,z);2)运用kd-tree 查找点P i ’的最近邻的m 个点,够成m*3的矩阵A ;3)计算协方差矩阵A ’A ;4)求解3)中获得的协方差矩阵的特征值1λ,2λ,3λ;5)取1λ,2λ,3λ中的最小特征值min λ;6)计算’i p 的曲率:min λ/(1λ+2λ+3λ);实现代码见附件5、曲面曲率的应用(1)基于曲率的点采样曲面简化对于从原始的几何形体采样得到的密集点云来说,有时并不需要丰富的细节特征只需要形体的大致轮廓,或者为了避免对利用采样得到的密集点云进行曲面重建后再简化。
这时为了有利于绘制, 方便后续处理就有必要对点采样曲面进行简化。
关于点采样曲面的简化,Pauly 等【4】提出了几种有效的方法, 主要是将原来网格曲面成熟的简化算法推广到点采样曲面。
从微分几何的角度来看, 原始曲面曲率较高的区域, 应该用较多的采样点表示, 相反则用相对较少的采样点表示。
曲率是反映曲面的基本特性, 因此常用作简化的阈值准则之一。
一般基于曲率的简化是这样的:设一个阈值, 小于阈值的简化掉, 反之则给予保留;反复重复该过程直至简化之后的点个数满足要求为止, 或者当没有小于阈值的采样点了。
然而这种做法一个明显不足的是, 简化可能一直在某个曲相差微小的区域进行, 相反在需要简化的曲面区域则没有简化到。
为此, 简化算法可以这样改进:首先根据曲率大小把曲率分成不同的区间段, 相当于对点采样曲面进行分割, 然后设一个曲率偏差, 最后把每个区间段内与最大曲率点相差小于偏差的采样点简化掉。
这样做法的最大好处在于点采样曲面的不同曲率间段的区域都简化到。
根据不同的需要,区间段的个数, 曲率偏差可以取不同的值, 甚至每个区间段的曲率偏差可以取不同。
(2)特征提取特征提取在计算机视觉、图像处理、逆向工程等领域得到广泛研究。
在逆向工程中, 三维几何形体的特征提取在曲面的重建、光顺去噪等都占有重要的地位。
Gumhold等【5】通过Hoppe 等的主元分析, 为每个采样点加权, 接着利用最小生成图(minimum spanning graph)提出一种直接在点云曲面进行特征提出的方法;与之类似,Pauly 等[ 5] 将图像处理中的多尺度概念引入点采样曲面,提出一种抗干扰性更强的多尺度特征提取方法。
本文对点采样曲面进行特征提取采用的方法也与Gumhold 类似, 只不过算法中的曲率计算方法不一样。
曲率计算在工程、医学、信息学等方面都有很多的应用,在法医学上,对于无身源颅骨和失踪人照片重叠的过程中,轮廓线的曲率是一个重要的指标。
在工程制造方面,曲率的一致性也发挥了很大的作用6、总结本文首先给出了两种方法在点集上直接计算曲率,试验表明这两种方法都可以达到很小的误差,然后我们从准确度和效率上对这两种方法做了比较,给出了各自的适用场合.进一步的工作可以考虑曲率的一些应用.在点集的重采样和点集的简化[6]中,曲率可以起指导作用,比如曲率小的区域比较平坦,采样密度可以小一些. 在点集的绘制方面, A. Ka laiah等人[4]提出了一种基于曲率的绘制方法,但是他们的曲率是通过参数曲面或者网格计算得到的,而结合我们的方法,就可以直接从点集进行绘制.本文填补了从点集模型计算曲面曲率的空白,拓展了点集模型的应用。
7、参考文献【1】邬凯,等.山区公路路基边坡地质灾害远程监测预报系统开发及应用[J].岩土力学,【2】贺美芳.基于散乱点集数据的曲面重建关键技术研究[D].南京航空航天大学,2006.【3】吴剑煌.点采样曲面曲率估计。
【4】王奎武.基于点表示的曲面曲率计算方法。
【5】Zwicker M , Pauly M, Knoll O et al. Poin tsh op 3D: an int eractive s yst em f or point-bas ed s urf ace editing [C ] . Proceedings of Sigg raph 2002, San Antoni o, TX, Jul y 2002, 322-329.【6】Paul y M, Gross M. Eff ecient simplif icati on of point-sampl ed su rfaces [C ] . IEEE Proceedings of Vi sualizati on 2002, Bos ton, M A, Oct ober 2002.。