现代控制理论基础
- 格式:ppt
- 大小:2.77 MB
- 文档页数:54



Elements of Modern Control Theory主讲:董霞现代控制理论基础西安交通大学机械工程学院Email:xdong@办公地点:西二楼东207参考教材《现代控制工程》王军平董霞主编西安交通大学出版社教材《现代控制理论基础》(机械类)何钺编机械工业出版社《现代控制工程》(第三版)Katsuhiko Ogata著卢伯英、于海勋译电子工业出版社第一章绪论现代控制理论是在20世纪50年代末、60年代初形成的控制理论。
之所以称其为现代控制理论是与经典控制理论相比较而言的。
1.1 控制理论发展简史目前国内外学术界普遍认为控制理论经历了三个发展阶段:经典控制理论现代控制理论智能控制理论这种阶段性发展是由简单到复杂、由量变到质变的辩证发展过程。
并且,这三个阶段不是相互排斥,而是相互补充、相辅相成的,它们各有其应用领域,并还在不同程度地继续发展着。
控制理论中反馈的概念代表性人物:瓦特(J.Watt),于1788年发明了蒸汽机飞球调速器。
这是一个典型的自动调节系统,由此拉开了经典控制理论发展的序幕。
控制理论诞生前,人们对于反馈就有了认识。
经典控制理论的诞生1868年,英国物理学家J.C.Maxwell 发表《论调速器》论文,解决了蒸汽机调速系统中出现的剧烈振荡问题;1877年,英国科学家E.J. Routh 建立了劳斯稳定性判据;1895年,德国数学家A. Hurwitz 提出了胡尔维茨稳定性判据;1892年,俄国数学家A. M.Lyapunov 发表了专著《论运动稳定性的一般问题》;1922年,美国的N. Minorsky 研究出用于船舶驾驶的伺服机构并提出PID 控制方法;1932年,美籍瑞典人H. Nyquist 提出了频域内研究系统稳定性的频率判据;经典控制理论的诞生1940年,H. W.Bode引入了对数坐标,使频域稳定性判据更适合工程应用;1942年,H. Harris引入了传递函数概念;1948年,W.R. Evans提出了根轨迹方法;1948年,N. Wiener发表了著名的《控制论》,标志着经典控制理论的诞生。

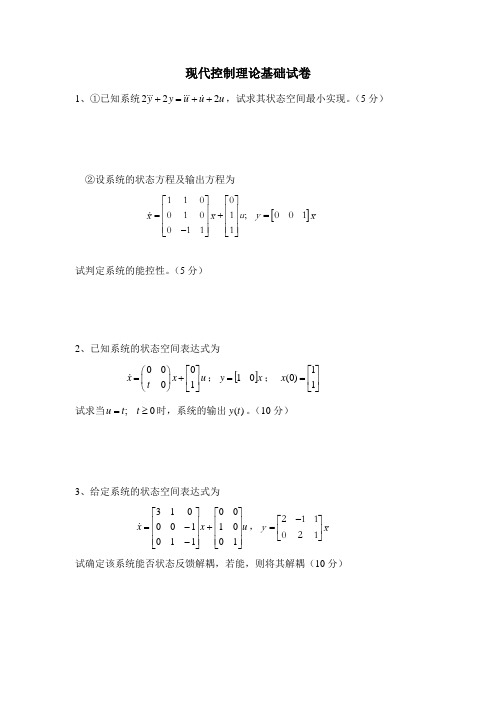
现代控制理论基础试卷1、①已知系统u u uy y 222++=+ ,试求其状态空间最小实现。
(5分)②设系统的状态方程及输出方程为11000101;0111x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦[]001y x =试判定系统的能控性。
(5分)2、已知系统的状态空间表达式为00001⎛⎫⎡⎤=+ ⎪⎢⎥⎝⎭⎣⎦x x u t ;[]x y 01=; ⎥⎦⎤⎢⎣⎡=11)0(x 试求当0;≥=t t u 时,系统的输出)(t y 。
(10分)3、给定系统的状态空间表达式为u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=100100110100013 ,211021y x -⎡⎤=⎢⎥⎣⎦ 试确定该系统能否状态反馈解耦,若能,则将其解耦(10分)4、给定系统的状态空间表达式为[]12020110,1001011--⎡⎤⎡⎤⎢⎥⎢⎥=-+=⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦x x u y x设计一个具有特征值为 1 1 1---,,的全维状态观测器(10分)5、①已知非线性系统 ⎩⎨⎧--=+-=2112211sin 2x a x x x x x试求系统的平衡点,并确定出可以保证系统大范围渐近稳定的1a 的范围。
(5分)②判定系统11221223x x x x x x =-+⎧⎨=--⎩在原点的稳定性。
(5)6、已知系统 u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=110011 ,试将其化为能控标准型。
(10分)7、已知子系统1∑ 111121011x x u -⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦,[]1110y x = 2∑ []22222110,01011x x u y x -⎡⎤⎡⎤=+=⎢⎥⎢⎥-⎣⎦⎣⎦ 求出串联后系统∑1∑ 2∑ 及其传递函数矩阵 (10分)。
答案1① 解 取拉氏变换知 )()2()()22(33s u s s s y s ++=+21121)1(21)(2213++-=+++=s s s s s g (3分) 其状态空间最小实现为u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=101110 ; 21021+⎥⎦⎤⎢⎣⎡=x y (2分)② 解1n c u BABA B -⎡⎤=⎣⎦ (2分)012111101⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦,秩为2, 系统状态不完全能控。

现代控制知识点总结在现代化的工业生产和自动化系统中,控制技术扮演着至关重要的角色。
控制技术的发展不断推动着生产系统的智能化、高效化和自动化。
本文将从控制理论、控制系统的组成、控制器的类型、现代控制技术等方面对现代控制知识点进行总结。
一、控制理论控制理论是现代控制的基础,它主要研究控制系统的设计、分析和优化。
在控制理论中,最经典的理论是PID控制器(比例、积分、微分控制器)。
PID控制器基于误差信号的比例、积分和微分来调节控制变量,它的简单结构和良好的稳定性使得它在工业控制中得到广泛应用。
除了PID控制器,控制理论中还有模糊控制、神经网络控制、模型预测控制等现代控制技术。
这些技术通过不同的控制策略和算法来实现对复杂、非线性的系统控制,提高了控制系统的性能和效率。
二、控制系统的组成控制系统是由传感器、执行器、控制器和执行对象组成的。
传感器用于采集控制对象的状态信息,将其转换为电信号送入控制器;执行器根据控制器的指令控制执行对象的动作;控制器是整个系统的核心部件,它根据传感器反馈的信息计算出控制信号,并将其送至执行器。
控制系统的组成非常复杂,不同的控制系统需要不同的传感器、执行器和控制器来实现。
在现代工业生产中,控制系统的组成将更加多样化和复杂化,需要运用各种现代控制技术来实现对各种复杂对象的控制。
三、控制器的类型控制器是控制系统的核心部件,它按照控制对象的状态信息,计算出控制信号来实现对执行对象的控制。
根据其控制策略和算法的不同,控制器主要有以下几种类型:1. 开环控制器:开环控制器没有反馈环节,它根据固定的控制规律来生成控制信号。
开环控制器简单、成本低,但不能对外界的干扰进行修正,容易受到外界因素的影响。
2. 闭环控制器:闭环控制器有反馈环节,它根据传感器反馈的信息进行计算和修正,实现对控制对象的精确控制。
闭环控制器有PID控制器、模糊控制器、神经网络控制器等。
3. 数字控制器:数字控制器是一种基于数字信号处理的控制器,它使用数字信号进行控制计算和处理,能够实现对非线性、复杂系统的控制,并且具有较强的抗干扰能力和精确性。