现代控制理论实验指导书2017年_学生版
- 格式:pdf
- 大小:326.72 KB
- 文档页数:10
现代控制理论实验指导书实验⼀多变量时域响应⼀、实验⽬的1、掌握多输⼊多输出(MIMO )系统传递函数的建⽴2、分析MIMO 系统时域响应的特点⼆、实验仪器1、 TDN —AC/ACS 型⾃动控制系统实验箱⼀台2、⽰波器3、万⽤表三、实验原理与电路1、传递函数矩阵关于传递函数矩阵的定义是当初始条件为零时,输出向量的拉⽒变换式与输⼊向量的拉⽒变换式之间的传递关系。
设系统动态⽅程为()()x Ax t Bu t ?=+,()()()y t Cx t Du t =+令初始条件为零,进⾏拉⽒变换,有()()()()()()sX s AX s BU s Y s CX s DU s =+=+则11()()()()[()]()()()X s sI A BU s Y s C sI A B D U s G s U s --=-=-+=系统的传递函数矩阵表达式为1()()G s C sI A B D -=-+设多输⼊多输出系统结构图如图1-1。
图1-1多输⼊多输出系统结构图它是由传递函数矩阵为()G s 和()H S 的两个⼦系统构成。
由于()()()()[()()]()[()()()]Y s G s E s G s U s Z s G s U s H s Y s ==-=-1()[()()]()()Y s I G s H s G s U S -=+闭环传递矩阵为:1()[()()]()s I G s H s G s -Φ=+ 2、实验题⽬某⼀控制系统如图1-2,为⼆输⼊⼆输出系统的结构图。
图1-2 ⼆输⼊⼆输出系统的结构图由系统结构图可知,控制器的传递函数阵()c G s 为10()01c G s ??=被控对象的传递函数阵()p G s 为1/(0.11)0()1/(0.11)1/(0.11)p s G s s s +??=??++??反馈传递函数阵()H s 为10()01H s ??=?于是根据闭环传递矩阵公式得1()[()()()]()()c p c p s I G s G s H s G s G s -Φ=+ 将(),(),()c p G s G s H s 代⼊上式可得1101/(0.11)01010()011/(0.11)1/(0.11)0101s s s s -?+Φ=+++1/(0.11)0101/(0.11)1/(0.11)01s s s +++化简得21/(0.12)0()(0.11)/(0.12)1/(0.12)s s s s s +??Φ=??+++??由上式可得系统的输出量()()0.12Y s U s s =+21220.111()()()(0.12)0.12s Y s U s U s s s +=+++ 四、实验内容及步骤1、根据图1-2设计模拟电路图1-3,并按图1-3搭接线路图1-3 系统模拟电路图2、令u1为⼀阶跃信号,观察并记录系统输出的波形。
现代控制理论》实验指导书王璐自动化07-1 班山东科技大学机电系实验一系统的传递函数阵和状态空间表达式的转换、实验目的1 •学习多变量系统状态空间表达式的建立方法、了解状态空间表达式与传递函数相互转换的 方法; 2.通过编程、上机调试,掌握多变量系统状态空间表达式与传递函数相互转换方法。
、实验要求学习和了解系统状态方程的建立与传递函数相互转换的方法;其中A 为n x n 维系数矩阵、B 为n x r 维输入矩阵C 为m x n 维输出矩阵,D 为传递阵,一般情况下为0。
系统的传递函数阵和状态空间表达式之间的关系如式(1 — 2)示。
式(1.2)中,num(s)表示传递函数阵的分子阵,其维数是 m x r ; den(s)表示传递函数阵的按s 降幕排列的分母。
五、实验步骤1 .据所给系统的传递函数或( A 、B 、C 阵),依据系统的传递函数阵和状态空间表达式之间的 关系如式(1— 2),采用MATLA B file.m 编程。
注意:ss2tf 和tf2ss 是互为逆转换的指令; 2. 在MATLA 界面下调试程序,并检查是否运行正确。
3. 已知MIMO 系统的系统的传递函数,求系统的空间状态表达式。
系统的传递函数为:4. 从系统的传递函数(1.4)式求状态空间表达式。
程序:num =[0 0 1 2;0 1 5 3]; %在给num 赋值时,在系数前补0,必须使num 和den 赋值的个 数相同; den =[1 2 3 4];[A,B,C,D]=tf2ss( num,de n)二、实验设备1. 计算机1台2.MATLAB6.X 软件 1 套。
四、实验原理说明设系统的模型如式 x Axy Cx(1 — 1)示。
Bu x DuR n u R r y R m(1— 1)G (S )器 C (SI A )1B D(1 — 2)G(S)s 2 5s 3 s 32s 23s 4(1 — 4)程序运行结果A =-2 -3 -4 1 0 0 0 1B =1 0 0在已知系统的状态空间表达式可以求得系统的传递函数,现在已知系统的状态空间表达式来求 系统的传递函数,对上述结果进行相应的验证。
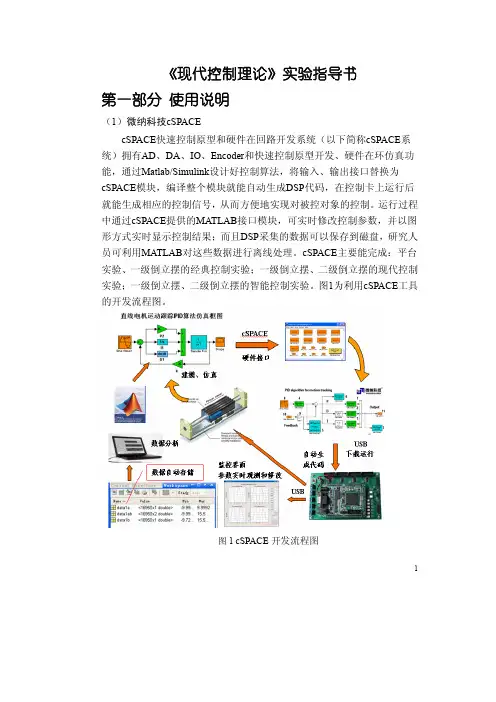
《现代控制理论》实验指导书第一部分使用说明(1)微纳科技cSPACEcSPACE快速控制原型和硬件在回路开发系统(以下简称cSPACE系统)拥有AD、DA、IO、Encoder和快速控制原型开发、硬件在环仿真功能,通过Matlab/Simulink设计好控制算法,将输入、输出接口替换为cSPACE模块,编译整个模块就能自动生成DSP代码,在控制卡上运行后就能生成相应的控制信号,从而方便地实现对被控对象的控制。
运行过程中通过cSPACE提供的MATLAB接口模块,可实时修改控制参数,并以图形方式实时显示控制结果;而且DSP采集的数据可以保存到磁盘,研究人员可利用MATLAB对这些数据进行离线处理。
cSPACE主要能完成:平台实验、一级倒立摆的经典控制实验;一级倒立摆、二级倒立摆的现代控制实验;一级倒立摆、二级倒立摆的智能控制实验。
图1为利用cSPACE工具的开发流程图。
图1 cSPACE开发流程图1(2)AEDK-LabACT-3A自控原理实验箱AEDK-LabACT-3A自动控制实验箱主要能完成:1、自动控制原理实验;2、微机控制技术实验;3、控制系统实验。
自动控制实验箱根据这三个实验项目设计了四个功能区来实现。
根据功能本实验机划分了各种实验区均在主实验板上。
实验区组成见表1。
表1 实验区组成A 实验区模拟运算单元有六个模拟运算单元,每单元由多组电阻、或电容构成的输入回路、反馈回路和1~2个运算放大器组成。
A1~A6模拟运算扩充库包括校正网络库(A7)、整形模块(A8),可调零放大器(A9),放大器(A10)和2个0~999.9KΩ的直读式可变电阻、2个电位器及多个电容(A11)。
A7~A11B 实验区手控阶跃信号发生器由手控阶跃发生(0/+5v、-5v/+5v),幅度控制(电位器),非线性输出组成。
B1 函数发生器含有十种(可选择)波形输出:矩形波、正弦波、斜坡、方波输出,方波/正弦波、矩形波/正弦波同时输出,继电特性、饱和特性、死区特性及间隙特性等非线性输出。
现代控制理论实验指导书实验一 状态空间控制模型系统仿真及状态方程求解[实验目的]1、熟悉线性定常离散与连续线性性系统的状态空间控制模型的各种表示方法。
2、熟悉系统模型之间的转换功能。
3、利用MATLAB 对线性定常系统进行动态分析 [实验内容]1、给定系统125.032)(2323++++++=s s s s s s s G ,求系统的零极点增益模型和状态空间模型,并求其单位脉冲响应及单位阶跃响应。
num=[1 2 1 3];den=[1 0.5 2 1];sys=tf(num,den);sys1=tf2zp(sys);sys2=tf2ss(sys); impulse(sys2);step(sys2) //上述在新建的一个M 函数里 sys=tf(num,den) //零极点增益模型,在命令窗口 Transfer function: s^3 + 2 s^2 + s + 3 ----------------------- s^3 + 0.5 s^2 + 2 s + 1sys1=tf2zp(num,den)//状态空间模型 sys1 =-2.1746 0.0873 + 1.1713i 0.0873 - 1.1713i [a,b,c,d]=tf2ss(num,den)a = -0.5000 -2.0000 -1.0000 1.0000 0 0 0 1.0000 0b = 1 0 0c = 1.5000 -1.0000 2.0000d = 1命令窗口输入:s=tf('s');g=(s^3+2*s^2+s+3)/(s^3+0.5*s^2+2*s+1);impulse(g) 可得单位脉冲响应:图1.1 系统的单位脉冲响应命令窗口输入:s=tf('s');g=(s^3+2*s^2+s+3)/(s^3+0.5*s^2+2*s+1);step(g)可得单位阶跃响应:图1.2 系统的单位阶跃响应实验二 状态反馈及状态观测器的设计[实验目的]1、熟悉状态反馈矩阵的求法。
现代控制理论基础实验指导书实验一:控制系统模型转换一、实验目的1.掌握控制系统模型转换,并使用计算机仿真软件验证。
2.学习并会简单应用MATLAB软件。
二、实验器材[1] 微型计算机[2] MATLAB软件三、实验要求与任务1.设系统的零极点增益模型为,求系统的传递函数及状态空间模型。
解:在MATLAB软件中,新建m文件,输入以下程序后保存并运行。
%Example 1%k=6;z=[-3];p=[-1,-2,-5];[num,den]=zp2tf(z,p,k)[a,b,c,d]=zp2ss(z,p,k)其中:zp2tf函数——变零极点表示为传递函数表示zp2ss函数——变零极点表示为状态空间表示记录实验结果,并给出系统的传递函数及状态空间模型。
2.给定离散系统状态空间方程求其传递函数模型和零极点模型,并判断其稳定性。
解:在MATLAB软件中,新建m文件,输入以下程序后保存并运行。
%Example 2%a=[ 0 0 ; 0 0 0; ;0 0 0];b=[1;0;1;0];c=[0,0,0,1];d=[0];[num,den]=ss2tf(a,b,c,d)[z,p,k]=ss2zp(a,b,c,d)pzmap(p,z)title('Pole-zero Map')其中:ss2tf函数——变状态空间表示为传递函数表示ss2zp函数——变状态空间表示为零极点表示pzmap ——零极点图记录实验结果,并给出系统的传递函数模型和零极点模型;绘出图形,并判断系统稳定性。
3.已知系统的传递函数为,求系统的零极点增益模型及状态空间模型。
tf2zp函数——变系统传递函数形式为零极点增益形式tf2ss函数——变系统传递函数形式为状态空间表示形式编写程序,记录实验结果,并给出系统的状态空间模型和零极点模型。
4.已知系统状态空间表达式为ss2tf函数——变状态空间表示为传递函数表示ss2zp函数——变状态空间表示为零极点表示编写程序,记录实验结果,并给出系统传递函数模型和零极点模型。
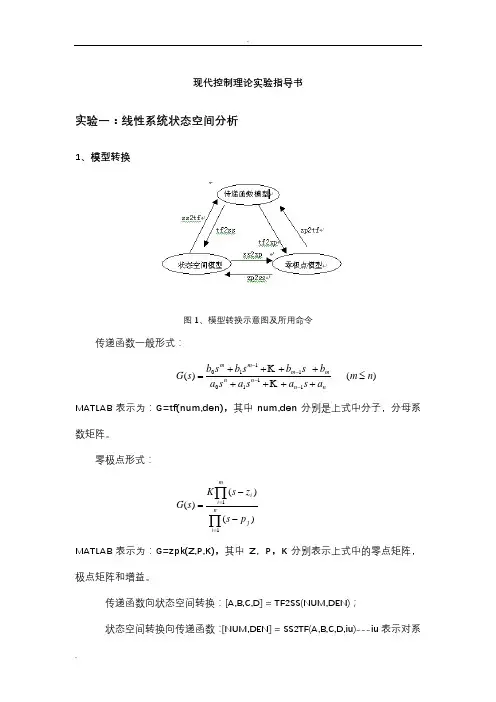
现代控制理论实验指导书实验一:线性系统状态空间分析1、模型转换图1、模型转换示意图及所用命令传递函数一般形式:)()(11101110n m a s a s a s a b s b s b s b s G n n n n m m m m ≤++++++++=----MATLAB 表示为:G=tf(num,den),其中num,den 分别是上式中分子,分母系数矩阵。
零极点形式:∏∏==--=n i j mi i ps z s K s G 11)()()( MATLAB 表示为:G=zpk(Z,P,K),其中 Z ,P ,K 分别表示上式中的零点矩阵,极点矩阵和增益。
传递函数向状态空间转换:[A,B,C,D] = TF2SS(NUM,DEN);状态空间转换向传递函数:[NUM,DEN] = SS2TF(A,B,C,D,iu)---iu 表示对系统的第iu 个输入量求传递函数;对单输入iu 为1;验证教材P438页的例9-6。
求P512的9-6题的状态空间描述。
>> A=[0 1;0 -2];>> B=[1 0;0 1];>> C=[1 0;0 1];>> D=[0 0;0 0];>> [NUM,DEN] = ss2tf(A,B,C,D,1)NUM =0 1 20 0 0DEN =1 2 0>> [NUM,DEN] = ss2tf(A,B,C,D,2)NUM =0 0 10 1 0DEN =1 2 0给出的结果是正确的,是没有约分过的形式P512 9-6>> [A,B,C,D]=tf2ss([1 6 8],[1 4 3])A =-4 -31 0B =1C =2 5D =12、状态方程求解单位阶跃输入作用下的状态响应:G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x). 零输入响应[y,t,x]=initial(G,x0)其中,x0为状态初值。
现代电气控制实训指导书项目一触摸屏TPC7062K 与SMART 200 以太网通讯一、配置要求1.西门子 S7-200smart 软件2.西门子昆仑通态 MCGS 嵌入版 7.7 版本软件。
3.一根网线4.西门子 S7-200 SmartPLC5.MCGS HMI 触摸屏带有网口二、SMART 软件设置设置 IP 为 192.168.1.191三、编辑测试程序四、MCGS 设置4.1、选择类型4.2设置完成后鼠标双击击“设备窗口”4.3鼠标右击窗口选择“设备工具箱”4.4选择设备工具箱中设备管理选择“通用 TCP/IP 父设备”也选择西门子_Smart200 驱动。
4.5双击“设备0”设置 IP4.6本地 IP 设置触摸屏的地址这里置”192.168.1.190”远程 IP 地址设置 PLC 地址”192.168.1.191”设置完成关于其触摸屏的 IP 地址设置是,进入触摸屏的硬件中设置。
触摸屏进入工程画面前。
点击触摸屏!进入其系统设置,选择 IP 设置。
此时触摸屏就可以和西门子 S7-200 SMART 通讯了!使用 S7-200 SMARTRS485 口与其通讯。
和 S7-200 与 MCGS 一样!选择 S7-200 PPI 协议!实验二S7-300 与触摸屏TPC7062K 通讯一、配置要求1.西门子 S7-300 软件2.西门子昆仑通态 MCGS 嵌入版 7.7 版本软件。
3.一根网线4.西门子 S7-300 PLC5.MCGS HMI 触摸屏带有网口。
二、S7-300 软件设置设置 IP 为192.168.1.191,图中使用了路由器。
编辑测试程序MCGS 设置选择类型设置完成后鼠标双击击“设备窗口”鼠标右击窗口选择“设备工具箱”选择设备工具箱中设备管理选择“通用 TCP/IP 父设备”也选择西门子 CP443-1 驱动。
双击“设备 0”设置 IP本地 IP 设置触摸屏的地址这里设置”192.168.1.190”远程 IP 地址设置 PLC 地址”192.168.1.191”设置完成关于其触摸屏的 IP 地址设置是,进入触摸屏的硬件中设置。
现代控制理论实验指导书西安文理学院物理与机电工程学院目录前言 (1)实验一系统的传递函数阵和状态空间表达式的转换 (3)实验二多变量系统的能控性和能观测性分析 (7)实验三多变量系统的稳定性分析 (13)实验四系统设计:状态观测器的设计 (17)前言这是一本为工科高年级学生编写的实验指导书,作为控制系统领域各门控制课程的配套实验教材。
一、现代控制理论实验的任务“现代控制理论”是全日制本科自动化专业的重要专业课程,它的实践性教学环节,对学生理解和掌握现代控制理论起着至关重要的直接影响作用。
现代控制理论实验的主要任务是使学生通过实验进一步理解和掌握现代控制理论的基本概念、基本原理和控制系统的分析与设计方法。
它是现代控制理论课程教学的一部分,其主要目标如下:(1)深刻理解现代控制理论的基本理论;(2)初步掌握控制系统的分析与设计方法;(3)学习和掌握现代计算机技术及其辅助工具的运用,提高计算机的应用能力与水平;(4)提高实际应用能力和动手操作能力,培养严肃认真、一丝不苟的科学态度。
二、实验的要求现代控制理论实验是一个专业性较强的实践环节,要求有专门的实验场所和实验设备;并且要求参加实验者必须具备必要的相关理论基础知识,对所做实验的前提条件及制约因素有足够的认识和理解;同时要求参加实验者具有较强的观察思考能力、研究分析能力和创新能力。
三、现代控制理论实验的实现方法现代控制理论课程的实验方法比较灵活,实验方案和思路也比较多。
众多厂家和高校都研制开发出了各种实验箱以及相应的实验平台,但大多数受到实验场所、实验设备等教学条件的制约。
按照加强理论、巩固基础、培养学生的观察思考能力和创新能力的指导思想,本实验指导书主要通过“计算机软件仿真”的实现方法去完成实验,使学生加深对所学理论的理解和认识。
四、对参加实验学生要求(1)认真阅读实验指导书,复习与实验有关的理论知识,明确每次实验的目的,了解实验所涉及的相关软件的操作,熟悉实验的内容和方法。
实验一 系统能控性与能观性分析一、实验目的1.理解系统的能控和可观性。
二、实验设备1.THBCC-1型 信号与系统·控制理论及计算机控制技术实验平台;三、实验内容二阶系统能控性和能观性的分析四、实验原理系统的能控性是指输入信号u 对各状态变量x 的控制能力,如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间内把系统所有的状态引向状态空间的坐标原点,则称系统是能控的。
对于图21-1所示的电路系统,设i L 和u c 分别为系统的两个状态变量,如果电桥中4321R R R R ≠,则输入电压u r 能控制i L 和u c 状态变量的变化,此时,状态是能控的。
反之,当4321R R =R R 时,电桥中的A 点和B 点的电位始终相等,因而u c 不受输入u r 的控制,u r 只能改变i L 的大小,故系统不能控。
系统的能观性是指由系统的输出量确定所有初始状态的能力,如果在有限的时间内根据系统的输出能唯一地确定系统的初始状态,则称系统能观。
为了说明图21-1所示电路的能观性,分别列出电桥不平衡和平衡时的状态空间表达式:u 0L 1u i R4R3R3R4R2R1R1R2C 1R4R3R3R4R2R1R1R2C 1R4R3R3R4R2R1R1R2L 1R4R3R3R4R2R1R1R2L 1u i c L c L ⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛+⎪⎪⎪⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎪⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛+-+-⎪⎭⎫⎝⎛+++-⎪⎭⎫ ⎝⎛+-+-⎪⎭⎫⎝⎛+++-=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛ y=u c =[0 1] ⎪⎪⎪⎭⎫ ⎝⎛c L u i (1)u 0L 1u i R4R3R3R4R2R1R1R2C 1- 0 0 R4R3R3R4R2R1R1R2L 1u i c L c L ⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛+⎪⎪⎪⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎪⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛+-+⎪⎭⎫ ⎝⎛+++-=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛[0u y c == ]1 ⎪⎪⎪⎭⎫ ⎝⎛c L u i (2)由式(2)可知,状态变量i L 和u c 没有耦合关系,外施信号u 只能控制i L 的变化,不会改变u c 的大小,所以u c 不能控。
.现代控制理论实验报告组员:院系:信息工程学院专业:指导老师:年月日实验1 系统的传递函数阵和状态空间表达式的转换[实验要求]应用MATLAB 对系统仿照[例1.2]编程,求系统的A 、B 、C 、阵;然后再仿照[例1.3]进行验证。
并写出实验报告。
[实验目的]1、学习多变量系统状态空间表达式的建立方法、了解系统状态空间表达式与传递函数相互转换的方法;2、通过编程、上机调试,掌握多变量系统状态空间表达式与传递函数相互转换方法。
[实验内容]1 设系统的模型如式(1.1)示。
p m n R y R u R x DCx y Bu Ax x ∈∈∈⎩⎨⎧+=+= (1.1)其中A 为n ×n 维系数矩阵、B 为n ×m 维输入矩阵 C 为p ×n 维输出矩阵,D 为传递阵,一般情况下为0,只有n 和m 维数相同时,D=1。
系统的传递函数阵和状态空间表达式之间的关系如式(1.2)示。
D B A SI C s den s num s G +-==-1)()()(()( (1.2)式(1.2)中,)(s num 表示传递函数阵的分子阵,其维数是p ×m ;)(s den 表示传递函数阵的按s 降幂排列的分母。
2 实验步骤① 根据所给系统的传递函数或(A 、B 、C 阵),依据系统的传递函数阵和状态空间表达式之间的关系如式(1.2),采用MATLA 的file.m 编程。
注意:ss2tf 和tf2ss 是互为逆转换的指令;② 在MATLA 界面下调试程序,并检查是否运行正确。
③ [1.1] 已知SISO 系统的状态空间表达式为(1.3),求系统的传递函数。
,2010050010000100001043214321u x x x x x x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡ []⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=43210001x x x x y (1.3)程序:A=[0 1 0 0;0 0 -1 0;0 0 0 1;0 0 5 0]; B=[0;1;0;-2]; C=[1 0 0 0]; D=0;[num,den]=ss2tf(A,B,C,D,1)程序运行结果:num =0 -0.0000 1.0000 -0.0000 -3.0000 den =1.0000 0 -5.0000 0 0从程序运行结果得到:系统的传递函数为:24253)(ss s S G --= ④ [1.2] 从系统的传递函数式求状态空间表达式。
《现代控制理论》实验指导书适用专业:电气工程与自动化课程代码: 8416340总学时: 40 总学分: 2.5编写单位:电气信息学院编写人:舒欣梅审核人:审批人:批准时间:年月日目录实验一(实验代码1)系统的传递函数阵和状态空间表达式的转换 (2)实验二(实验代码2)多变量系统的能控、能观和稳定性分析 (3)实验三(实验代码3)状态反馈和状态观测器的设计 (7)主要参考文献 (10)实验一 系统的传递函数阵和状态空间表达式的转换一、实验目的和任务1、 学习多变量系统状态空间表达式的建立方法、了解系统状态空间表达式与传递函数相互转换的方法。
2、 通过编程、上机调试,掌握多变量系统状态空间表达式与传递函数相互转换方法。
二、实验内容在运行示例程序的基础上,应用MATLAB 对所给系统编程并验证。
三、实验仪器、设备及材料PC 计算机1台(要求P4-1.8G 以上),MA TLAB6.X 软件1套。
四、实验原理设系统的模型如式(1.1)示。
p m n R y R u R x D Cx y Bu Ax x ∈∈∈⎩⎨⎧+=+= (1.1)其中A 为n ×n 维系数矩阵、B 为n ×m 维输入矩阵 C 为p ×n 维输出矩阵,D 为传递阵,一般情况下为0,只有n 和m 维数相同时,D=1。
系统的传递函数阵和状态空间表达式之间的关系如式(1.2)示。
1()()()()num s G s C sI A B D den s -==-+ (1.2) 式(1.2)中,)(s num 表示传递函数阵的分子阵,其维数是p ×m;)(s den 表示传递函数阵的按s 降幂排列的分母。
五、主要技术重点、难点1、 多变量系统状态空间表达式的建立方法2、 系统状态空间表达式与传递函数相互转换的方法。
六、实验步骤1、在MA TLAB 中输入以下例子,并验证输出结果。
[例1.1] 已知 两输入两输出系统状态空间模型16910463126824479112251213141000218022x x u y x ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎡⎤=⎢⎥⎣⎦ 试建立MA TLAB 模型,并进行模型转换。
实验一 利用MATLAB 分析系统状态空间模型一、实验设备计算机,MATLAB 软件。
二、实验目的1、熟悉MATLAB 编程环境和基本语法,了解控制系统工具箱的常用函数;2、通过编程、上机调试,掌握系统状态空间表达式与传递函数相互转换方法。
三、实验原理说明1、打开Matlab ,选择“File\New\Script ”可建立M 文件;选择“File\New\Model ”可建立模型文件。
在命令行窗口可以直接输入命令,也可以观看运算结果,它是直接反映运算信息的重要窗口。
2、设系统的模型如式(1.1)示。
p m n R y R u R x D Cx y Bu Ax x ∈∈∈⎩⎨⎧+=+= (1.1)其中A 为n ×n 维系数矩阵、B 为n ×m 维输入矩阵 C 为p ×n 维输出矩阵,D 为传递阵,一般情况下为0,只有n 和m 维数相同时,D=1。
系统的传递函数阵和状态空间表达式之间的关系如式(1.2)示。
1()()()()num s G s C sI A B D den s -==-+ (1.2) 式(1.2)中,)(s num 表示传递函数阵的分子阵,其维数是p ×m;)(s den 表示传递函数阵的按s 降幂排列的分母。
四、实验内容与步骤1、采用MATLAB 编程,求系统的传递函数阵或状态空间表达式。
2、在MA TLAB 下调试程序,并检查是否运行正确。
3、例1:已知SISO 系统的传递函数为43235)(232+++++=s s s s s S G (1)将其输入到MATLAB 工作空间并转换为零极点增益模型;(2)获得系统的状态空间模型。
(3)程序:clearclose allclcnum =[0 1 5 3];den =[1 2 3 4];[z,p,k]=tf2zp(num,den)[A,B,C,D]=tf2ss(num,den)运行结果:z =-4.3028-0.6972p =-1.6506 + 0.0000i-0.1747 + 1.5469i-0.1747 - 1.5469ik =1A =-2 -3 -41 0 00 1 0B =1C =1 5 3D =4、例2:已知SISO 系统的状态空间表达式为,631234100010321321u x x x x x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡ []⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=321001x x x y(1)将其输入到MATLAB 工作空间;(2)求系统的传递函数。
第8章 线性系统状态空间分析与综合本章教学目标与要求1. 掌握用MA TLAB 语言输入线性时不变系统模型的三种方法----传递函数模型、零极点增益模型和状态空间模型。
2. 掌握用MATLAB 语言将传递函数模型、零极点增益模型和状态空间模型之间的互换方法。
3. 掌握用MA TLAB 语言将系统进行非奇异变换的方法。
4. 掌握用MA TLAB 语言求状态方程的解。
5. 掌握用MA TLAB 语言判断系统的能控性、能观性和稳定性。
6. 学习闭环系统极点配置定理及算法,学习全维状态观测器设计方法。
7. 学习用SIMULINK 搭建仿真模型,比较直接状态反馈闭环系统和带有状态观测器的状态反馈闭环系统在不同初始条件下的性能。
引言经典控制理论是用传递函数来描述系统的,得到的是系统的输入与输出之间的外部特性,而现代控制理论是用系统内部的状态变量也就是状态方程和输出方程来描述系统的,得到的是系统的完全描述。
传递函数和状态方程、输出方程之间可以相互转化,第8章主要讨论的是现代控制理论中线性系统的状态空间分析与综合问题。
利用MA TLAB 语言中关于现代控制理论问题的函数库,可以实现系统的传递函数模型和状态空间模型之间的进行互换、求解状态方程、判断系统能控性、能观性、稳定性、进行闭环极点配置、设计状态观测器等问题。
8.1 线性系统的状态空间描述8.1.1线性系统的状态空间描述的术语1.状态方程:由系统状态变量构成的一阶微分方程组2.输出方程:指定系统输出的情况下,该输出与状态变量间的函数关系式3.状态空间表达式:状态方程和输出方程总合,构成对一个系统完整的动态描述,称为状态空间表达式DU CX Y BUAX +=+=∙X8.1.2 .状态空间表达式的建立系统的状态空间描述一般可以从三个途径求得:一是从系统的物理或化学机理出发推导,二是由系统方块图来建立,三是由描述系统运动过程的高阶微分方程或传递函数予以演化而得。
《现代控制理论》实验指导书自动化学院自控实验室实验一 法捷耶夫算法求解1)(--A sI一、实验目的及意义了解控制系统的各种数学描述间的转换关系,并且考察学生的上机能力。
二、实验原理说明已知系统的模型如式(1.1)示。
p m n R y R u R x CuCx y Bu Ax x ∈∈∈⎩⎨⎧+=+= (1.1)其中A 为n ×n 维系数矩阵、B 为n ×m 维输入矩阵 C 为p ×n 维输出矩阵。
系统的传递函数阵和状态空间表达式之间的关系D B A SI C s G +-=-1)()(利用法捷耶夫算法可以求解1--)(A sI 。
设矩阵A 的特征多项式为n n n s s A sI s ααα+++=-∆-- 111)det()(则1)(--A sI 可以表示为1121201()[]()n n n n sI A B s B s B s α------=+++ 以上两式中的1α,2α,…,n α 和1-n B ,2-n B ,…,0B 可按下式来求I B n =-1 )(11--=n AB tr α I AB B n n 112α+=-- 2/)(22--=n AB tr αI AB B i i n i n 11-+--+=α i AB tr i n i /)(--=αI AB B n 110-α+= n AB tr n /)(0-=α00=+I AB n α三、实验内容已知状态空间方程:x=Ax+Bu 其中A=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---300110010 试用法捷耶夫算法求1)(--A sI四、实验步骤1、编写法捷耶夫算法函数程序 2、利用该函数求出1)(--A sI 。
实验二Layapunov 方程求解在MATLAB 控制工具箱中,函数lyap 和dlyap 用来求解Layapunov 方程,函数lyap 求解连续时间系统的Layapunov 方程。
函数dlyap 求解离散时间系统的Layapunov 方程。
现代控制理论实验实验一 线性定常系统模型一 实验目的1. 掌握线性定常系统的状态空间表达式。
学会在MATLAB 中建立状态空间模型的方法。
2. 掌握传递函数与状态空间表达式之间相互转换的方法。
学会用MATLAB 实现不同模型之间的相互转换。
3. 熟悉系统的连接。
学会用MA TLAB 确定整个系统的状态空间表达式和传递函数。
4. 掌握状态空间表达式的相似变换。
掌握将状态空间表达式转换为对角标准型、约当标准型、能控标准型和能观测标准型的方法。
学会用MATLAB 进行线性变换。
二 实验内容1. 已知系统的传递函数 (a) )3()1(4)(2++=s s s s G(b) 3486)(22++++=s s s s s G(c) 61161)(232+++++=z z z z z z G (1)建立系统的TF 或ZPK 模型。
(2)将给定传递函数用函数ss( )转换为状态空间表达式。
再将得到的状态空间表达式用函数tf( )转换为传递函数,并与原传递函数进行比较。
(3)将给定传递函数用函数jordants( )转换为对角标准型或约当标准型。
再将得到的对角标准型或约当标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。
(4)将给定传递函数用函数ctrlts( )转换为能控标准型和能观测标准型。
再将得到的能控标准型和能观测标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。
2. 已知系统的状态空间表达式(a) u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=106510 []x y 11=(b) u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=7126712203010 []111=y(c) u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=357213********* []x y 101= (d) u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=011310301100 []x y 210-= (1)建立给定系统的状态空间模型。
现代控制理论基础实验报告姓名:余国宏学号:140741138班级:141142A指导老师:刘家学实验一:状态空间的实现及状态方程求解一、实验内容 已知某系统传递函数90391390)(23+++=Φs s s s 1. 列出可控标准形表达式以及状态图。
2. 选择合适的采样周期,对状态方程离散化。
3. 求T Z ]111[=时的单位阶跃响应。
4. 选取不同的采样周期,分析采样周期变化对暂态性能的影响。
二、实验步骤1、系统可控标准型u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=∙100133990100010 []x y 0090= 状态图2、采样周期的选择由系统传递函数可得:)93()10(9090391390)(223++++=+++=Φs s s s s s s (1-1) 系统极点101-=λ,35.1*5.13,2j ±-=λ,取主导极点,对系统降阶处理,得到二阶特征方程:0932=++s s (1-2)由此可得振荡角频率3=n ω,阻尼比5.0=ζ,可计算出调节时间:s t n s 67.24==ζω ()02.0=∆ (1-3)为了观测到整个调节过程,取s t s 4=,取40个采样点,采样周期为0.1秒。
3、单位阶跃响应(1) 用Matlab 程序求离散化之后系统的阶跃响应A=[0 1 0;0 0 1;-90 -39 -13];B=[0;0;1];X0=[1;1;1];T=0.1; %采样周期为0.1秒[G,H]=c2d(A,B,T); %求离散化之后系统矩阵 S=zeros(3,100);S(:,1)=X0;for K=2:100;S(:,K)=G*S(:,K-1)+H;end;figure;subplot(2,2,1);plot(S(1,:));grid; %画出三个状态变量得曲线subplot(2,2,2);plot(S(2,:));grid;subplot(2,2,3);plot(S(3,:));grid(2)仿真曲线(3)改变采样周期为0.05秒,波形如下可以看出采样周期变小,状态变量的调节时间越长,而超调量,稳态值不变。