TSG_3受电弓的力学模型及运动微分方程_李丰良
- 格式:pdf
- 大小:100.71 KB
- 文档页数:3

技能点2-2 TSG3-630/25型受电弓实训指导书一、实训目的1.熟悉电力机车受电弓(TSG3-630/25型)的结构。
2.掌握电力机车受电弓(TSG3-630/25型)拆装的正确步骤和方法。
3.了解电力机车受电弓(TSG3-630/25型)检修工艺及要求。
4.了解对检修后的电力机车受电弓(TSG3-630/25型)进行一般性检查和试验的项目及方法。
二、实训设备及材料1.受电弓(试验台) 1台2.电器钳工常用工具 1套3.秒表 1块4.兆欧表(2500V) 1块5.游标卡尺 1块6.降弓弹簧拆装工具 1套7.钢板尺 1把8.垫木、汽油、润滑脂、毛刷、棉纱、绝缘材料,若干三、实训步骤1.受电弓解体前的检查2.受电弓的解体:序号项目实训工序及要求质量标准标准分备注1 解体 1.接通风源,使受电弓呈升起状态。
152.拆卸绝缘杆瓷瓶,松开绝缘杆紧固螺母,打出销子,取下挡圈,冲出销子,然后旋下瓷瓶。
3.消除弹簧张力,松开紧固螺母,逆时针旋转螺杆,要求弹簧张力为零。
4.拆卸编织导线,用开口扳手拆下各编织导线紧固螺栓,取下所有编织导线。
5.拆卸推杆下部铰链:拆下编织导线,卸下螺母,垫圈,用铜棒冲出轴销。
6.拆卸推杆上部铰链:拆下螺钉,垫圈,用铜棒冲出轴销。
7.拆卸平衡杆上部铰链:拆下螺母、垫圈,冲出轴销。
8.拆卸平衡杆下部铰链:拆下螺母垫圈,抽出联体,取出卡箍,用扳手卸下轴承端盖,取出轴套,冲出轴销。
9.拆卸弓头部分:拆下滑板安装螺丝,取下滑板拆下支架及三角架安装螺丝,取下支架及三角架。
10.拆卸水平轴。
11.拆卸上框架部。
12.拆卸下臂杆。
13.拆卸升弓弹簧。
14.拆卸均衡梁部冲出轴销,取下均衡梁。
15.拆卸传动风缸:拆下风缸底座螺丝拆下风缸盖紧固螺丝,卸下风缸盖联体。
16.拆卸风缸连杆鞲鞴销,在降弓弹簧专用拆装台上压缩降弓弹簧,取出轴销。
17.拆卸活塞鞲鞴联体。
18.拆下降弓弹簧消除压力,取出弹簧。
3.受电弓的清洗检修:序号项目实训工序及要求质量标准标准分备注1 清洗用汽油棉丝清洗各部油垢,用0.2~0.3MPa的压缩空气吹干,各转轴,轴套,轴承,轴承体腔,轴销等均用白布擦净。


受电弓调研报告1. 引言受电弓是电力机车和电动车等动力车辆上用来与电气化铁路供电系统接触的重要部件。
它的设计与性能直接关系着电力机车的牵引功率、速度和牵引负荷等因素。
本文通过对受电弓的调研,将对其结构、工作原理及发展趋势进行分析和研究。
2. 受电弓的结构受电弓主要由受电弓头、受电弓杆、受电弓臂等组成。
受电弓头通过倾斜调节受电弓杆的伸缩长度,以达到与电气化供电系统接触的目的。
受电弓臂则作为受电弓与受电线下来电弧切齐的部分,在车辆运行过程中保持与受电线保持一定的接触力。
3. 受电弓的工作原理受电弓在车辆行驶过程中通过与受电线接触,将受电弓头与受电线保持良好的接触状态,并将电能传递到车辆的电气系统中。
其工作原理主要包括接触力的调节、弓头压强的控制以及钳块的磨损等。
3.1 接触力的调节受电弓通过机械结构实现与受电线的接触,其中受电弓头倾斜的角度与受电弓杆长度的调节直接影响接触力的大小。
在研发过程中,需要对杆长、角度以及材料弹性等因素进行合理的设计和调整,以保证接触力的稳定和适当。
3.2 弓头压强的控制受电弓弓头对受电线的压强也是一个重要的工作原理。
过高的压强可能导致受电线的损坏,而过低则会造成接触不良,影响电气能量的传输。
因此,在受电弓设计和运行中,需要通过力传感器和控制系统等手段来实现对弓头压强的控制和调节。
3.3 钳块的磨损受电弓中的钳块作为弓头与受电线接触的部分,其磨损情况也会影响受电弓的工作性能。
因此,需对钳块的材料选择和表面处理等进行合理设计,以减少磨损,并采取适当的维护和更换措施。
4. 受电弓的发展趋势随着电力机车技术的不断发展和进步,受电弓也在不断改进和创新。
未来受电弓的发展趋势主要体现在以下几个方面:4.1 自动调节目前,受电弓的调节主要依赖于司机的操作,存在一定的人为因素。
未来,随着自动化技术的发展,受电弓将会实现自动调节,通过传感器和控制系统等装置,实现自动控制和调节,提高受电弓的稳定性和工作效率。
T SG 3受电弓的力学模型及运动微分方程*李丰良 孙 焰(长沙铁道学院)提 要 在比较目前常用的几种受电弓的力学模型基础上,根据测试结果选取了一种比较合理的、适用于T SG 3受电弓的力学模型。
并推导了受电弓的运动微分方程。
关键词 计算机模拟 受电弓 微分方程 高速受流中图分类号 U 225Mechanical Models and DifferentialEquation of Motion for TSG 3PantographLi Feng liang Sun Yan(Dep.of M ath.,Ph ys.and M ech.,Changs ha Railway University,Changsh a 410075,China)Abstract When several m echanical models of the pa ntog ra ph in co mmo n use hav e been com-pared,acco rding to the test result,w e select a mo re reaso nable mechanical model fo r the T SG 3pantog raph.The differential equatio ns o f mo tion of the pa ntog ra ph hav e been deriv ed.Keywords co mputer simula tio n;panto g raph;differential equa tion o f mo tion;high speed current feeding受电弓、接触网及机车共同构成一个庞大的系统工程。
要准确地模拟弓网系统的行为,必须分别给出接触网和受电弓的运动微分方程,把机车的影响作为输入激励或将机车与弓网耦合在一起作为一个大系统建立其运动微分方程,然后编写计算机程序进行分析计算。
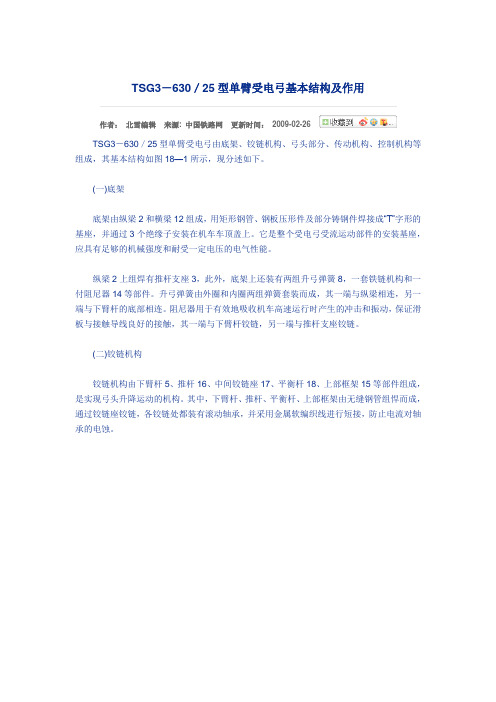
TSG3-630/25型单臂受电弓基本结构及作用作者:北雪编辑来源: 中国铁路网更新时间:2009-02-26TSG3-630/25型单臂受电弓由底架、铰链机构、弓头部分、传动机构、控制机构等组成,其基本结构如图18—1所示,现分述如下。
(一)底架底架由纵梁2和横梁12组成,用矩形钢管、钢板压形件及部分铸钢件焊接成“T”字形的基座,并通过3个绝缘子安装在机车车顶盖上。
它是整个受电弓受流运动部件的安装基座,应具有足够的机械强度和耐受一定电压的电气性能。
纵梁2上组焊有推杆支座3,此外,底架上还装有两组升弓弹簧8,一套铁链机构和一付阻尼器14等部件。
升弓弹簧由外圈和内圈两组弹簧套装而成,其一端与纵梁相连,另一端与下臂杆的底部相连。
阻尼器用于有效地吸收机车高速运行时产生的冲击和振动,保证滑板与接触导线良好的接触,其一端与下臂杆铰链,另一端与推杆支座铰链。
(二)铰链机构铰链机构由下臂杆5、推杆16、中间铰链座17、平衡杆18、上部框架15等部件组成,是实现弓头升降运动的机构。
其中,下臂杆、推杆、平衡杆、上部框架由无缝钢管组悍而成,通过铰链座铰链,各铰链处都装有滚动轴承,并采用金属软编织线进行短接,防止电流对轴承的电蚀。
1—绝缘子;2—纵梁;3—推杆支座;4—调整螺栓;5—下臂杆;6—弧形调整板;7—挂绳; 8—升弓弹簧;9—弓头;10—弹簧盒;11—升弓弹簧调整杆;12—横梁;13—转轴;14—阻尼器;15—上部框架;16—推杆;17—中间绞链座;18—平衡杆;19—转臂;20—U形连杆;21—传动绝缘子;22—传动气缸;23—缓冲阀.下臂杆5由两根钢管焊接成“T”字形构件,横向管两端装有两个转轴,纵向管的前部装有升弓弹簧支架和升弓弹簧8。
升弓弹簧的连接钢丝绳与弧形调整板6的背部紧贴,以此保证当受电弓在工作高度范围内升弓弹簧的拉力发生变化时,能产生足够的升弓转矩,维持弓头的静态接触压力基本不变。
调整调节螺栓4,可以改变弧形调整板6的倾角,也就改变了压力特性的摆动趋向。

受电弓的力学分析示例
受电弓的力学分析示例
在建立弓网系统运动微分方程的基础上,本文对TSG3受电弓几个主要参数进行了模拟计算.这些参数对于改进受电弓的设计,提高受电弓的性能,具有重要意义.特别是对TSG3受电弓的阻尼分析已成功地运用于实践,取得了很好的经济效益.
作者:李丰良唐松花 LI Feng-liang TANG Song-hua 作者单位:长沙铁道学院,数理力学系,湖南,长沙,410075 刊名:铁道学报ISTIC EI PKU英文刊名:JOURNAL OF THE CHINA RAILWAY SOCIETY 年,卷(期):2000 22(5) 分类号:U225 关键词:受电弓接触网计算机模拟。
基于LSSVM的弓网系统建模研究摘要随着当今高速铁路的迅速发展,对铁路基础设备性能的要求也越来越高。
弓网系统作为电力机车供电的主要组成部分,将直接关系到机车的受流质量,进而影响列车运行的稳定性。
为了提高弓网系统的接触受流性能,本文应用最小二乘支持向量机(LSSVM)进行了弓网系统的建模研究,主要工作如下:(1)首先基于弓网系统耦合动力学方程,得到弓网系统的离散化模型,然后结合弓网系统固有特性和环境因素,进一步构建弓网系统的广义模型。
(2)利用LSSVM对弓网广义模型参数进行辨识,分析列车速度和受电弓等效质量对弓网接触力的影响,再基于既有线的弓网实际检测数据进行弓网接触力的建模预报实验。
实验结果表明,基于LSSVM的弓网广义模型能够描述弓网接触力的动力学行为,具有较高的预报精度。
说明所提出方法用于弓网系统建模的有效性。
(3)为了优化LSSVM算法,提高弓网广义模型的预报精度,进一步根据基于误差相关性的LSSVM方法,运用于弓网广义模型的建模研究。
基于弓网的实际检测数据,对弓网接触力进行建模和预报实验。
实验结果表明,基于误差相关性的LSSVM方法对弓网模型具有较高的预报精度,说明所提出的方法对于弓网系统建模的可行性。
关键词:弓网系统,广义模型,LSSVM,误差相关性,建模,预报ISTUDY ON MODELING OF PANTOGRAPH-CATENARY SYSTEM BASED ON LEAST SQUARES SUPPORT VECTORMACHINEABSTRACTWith the rapid development of high-speed railway in today’s society,there is a growing requirement for the performance of basic railway equipments.The pantograph-catenary system as a major component of electric locomotive power supply will affect the current collecting quality of electric locomotive,which is associated with train stability.In order to make the pantograph-catenary system have higher quality of contact and current collection, the modeling problem for pantograph-catenary system is studied based on least square support machine(LSSVM),the main work of this thesis is as follows(1)At first,the discrete equation of pantograph-catenary system is obtained based on its coupling dynamic equation.Second,the generalized model of pantograph-catenary system is built by considering the inherent characteristics of pantograph-catenary system and the environment factors.(2)The generalized model of pantograph-catenary parameters are identified by the use of LSSVM.And the generalized pantograph-catenary system is used to study the influence of train speed and pantograph equivalent mass for the contact force.In addition,empirical study is implemented on the field measured data of pantograph-catenary used on existing railway line.The simulation results show that,the pantograph-catenary model based on LSSVM can effectively approximate the dynamic behavior of the contact force in pantograph-catenary system with higher prediction accuracy.In a word,the proposed method is effective in modeling of train pantograph-catenary system.(3)In order to improve the prediction accuracy of generalized pantograph-catenary model,a method based on error correlation is proposed for the optimization of LSSVM model, which is used in the study on modeling of generalized pantograph-catenary system.Based on the actual testing data of pantograph-catenary system,the contact force is modeled and predicted by the use of error correlation.The results show that,it improves the prediction accuracy with the method of LSSVM based on error correlation and achieves a good prediction results,indicating that the proposed method for pantograph-catenary system is feasible.Key Words:pantograph-catenary system,generalized model,least squares support vector machine,error correlation,modeling,predictionII目录第一章绪论 (1)1.1研究背景与意义 (1)1.2弓网关系国内外研究现状 (2)1.3最小二乘支持向量机研究现状 (4)1.4本文研究的主要工作 (5)1.5论文的结构 (5)第二章弓网系统概述 (6)2.1接触网模型 (6)2.1.1接触网简介 (6)2.1.2接触网的分类 (7)2.1.3接触网的运动微分方程 (8)2.2受电弓模型 (10)2.2.1受电弓简介 (10)2.2.2受电弓仿真模型 (12)2.3弓网耦合模型 (13)2.3.1弓网系统耦合动力学方程 (14)2.3.2弓网系统接触力广义模型 (14)2.4本章小结 (16)第三章最小二乘支持向量机理论 (17)3.1统计学习基础理论 (17)3.1.1机器学习的基本问题 (17)3.1.2统计学习理论核心问题 (18)3.2最小二乘支持向量机原理 (20)3.2.1最小二乘支持向量机回归 (21)3.2.2核函数 (22)3.3LSSVM模型参数选择 (24)3.3.1耦合模拟退火法 (24)3.3.2单纯形法 (25)3.3.3交叉验证 (26)3.4本章小结 (27)第四章基于LSSVM的弓网广义模型分析 (29)4.1概述 (29)IV4.2基于LSSVM的弓网广义模型辨识 (29)4.2.1模型参数选择 (30)4.2.2模型预报 (33)4.3试验分析 (34)4.3.1实验参数对弓网接触力影响的数值仿真 (34)4.3.2弓网实际检测数据的预报试验 (39)4.4本章小结 (41)第五章基于误差相关性的LSSVM方法及其在弓网中的应用 (43)5.1概述 (43)5.2基于误差相关性的LSSVM回归 (43)5.2.1模型结构 (43)5.2.2误差相关性系数的分析 (46)5.3基于误差相关性的LSSVM与弓网广义模型 (47)5.4试验分析 (47)5.4.1基于误差相关性的LSSVM在函数建模中的应用 (48)5.4.2基于误差相关性的LSSVM在弓网系统建模中的应用 (49)5.5本章小结 (52)第六章总结与展望 (53)6.1论文工作总结 (53)6.2工作展望 (53)参考文献 (55)个人简历在读期间发表的学术论文 (59)致谢 (60)V第一章绪论1.1研究背景与意义全球高速铁路的发展从上世纪中期至今,已有半个世纪之久,全世界高速铁路线路越来越多。
第31卷第6期铁道学报V01.31No.62OO9年12月JOURNAL0FTHECHINARAII。
WAYSOCIETYDecember2009文章编号:1001—8360(2009)06一0026一07基于受电弓弹性体模型的弓网动力学分析周宁,张卫华(西南交通大学牵引动力国家重点实验室,四川成都610031)摘要:针对简单链型悬挂接触网及电力机车DSA250型受电弓,基于有限单元法,建立接触网模型和考虑弹性变形的受电弓模型;对弓网的动力学性能进行分析,并与采用质量块受电弓模型的计算数据进行对比。
结果表明:当DsA250型受电弓通过该型接触网时,其在未出现离线情况下的最高速度为230km/h;受电弓前、后滑板表现出不同的受流特性,前滑板相对后滑板有较好的受流;考虑弓头与接触线的相互作用频率高于20Hz时,40~100Hz的高频分量在接触力和加速度频谱中占有较大的比重,弓头的变形模态将对弓网的动力学特性起至关重要的作用,如果采用质量块受电弓模型进行计算,将造成该模态的缺失,从而导致计算结果有较大的偏差。
关键词:接触网;受电弓;弓头;弹性;高频中图分类号:U264.3.4文献标志码:Adoi:10.3969/j.issn.1001—8360.2009.06.005AnalysisofDynamicPantograph—catenaryInteractionBasedonElasticPantographModelZHOUNing,ZHANGWei—hua(StateKeyLaboratoryofTractionPower,SouthwestJiaotongUniversity。
Chengdu610031,China)Abstract:ThedynamicperformanceofthestitchedcatenaryandtheDSA250pantographisanalyzed.Thefiniteelementmodelsofthepantographandthecatenaryareestablished,regardingthepan—headofthepantographasanelastjcbody.Furthermore,onthebasisofthecontactelement,thecoupledmotionequationofthepanto—graph—catenarysystemisderivedands01ved.Subsequentlycomparisonwiththespring—masssystempanto—graphmodelismade.Theresultsshowasfollows:Withtheelasticpan—headmodel,thecontactlosscannotbedetecteduntilthespeedreacheshigherthan230km/h;thequalityofcurrentcoUectionpresentsadifferenttrendonthetwocollectors,thefrontcollectorappearstobebetterthantherearcollector;consideringthein—teractionfrequencybeinghigherthanthetypicalfrequencybandof20Hz,thecomponentsofhighfrequenciesfrom40Hzto100Hzappearextremelyevidentandthedeformablemodesofthepan-headhaVeimportantinflu—enceonthedynamicperformancebetweenthepantographandcatenary;ifthespring—massmodelofpantographisused,therewillbeobviousdifferenceswiththeelasticpantographmodelinthecalculationresultsdueto1ac—kingofthemodesathighfrequencies.Keywords:catenary;pantograph;pan—head;elasticbody;highfrequency在高速电气化铁路研究中,弓网系统动力学问题一直是高速弓网关系研究的核心,决定着高速受流的质量。
1.发生弓网故障时,升弓控制管路内的气压快速下降,
管路上的快换三通接头,再由主断控制器连接管路及其相关附件传送到主断控制器。
矿车上用的集电弓:
旋转式集电弓结构由集电弓总成、旋转结构和定位机构部分组成。
手动操作集电弓旋转。
上图中:1定位销 2定位销压簧 3定位销铰接连杆 4定位销拉杆 5集电弓总成 6集电弓旋
11旋转轴 12首轮 13驾驶室
公交车上用的受电弓:
剪式四杆机构的伸缩范围可根据气缸的行程及剪式四杆机构的杆数,在
2固定在1上,2上加工有3,2并与4、14联结,5
6,6与8之间固定联结,6与8之间衬有7,9由10
固定在15上,另一端固定在12上,两组对称的5组成电源正极侧与电源负极侧,7实现电源正负极间的绝缘联结。
1. 公交车进站时,气缸伸出,推动绝缘连杆并带动剪式四杆机构上升,电极与电源触线紧密
接触,进行充电。
,
4套在3之外,3套在2之外,2有外螺纹的一端与8螺纹联结,
个端面与4接触,5的另一个端面与6接触,6套在2之外,
端面与7接触,8在2螺纹端联结的同时通过7压紧6, 9
无轨电车上的集电弓:
有关电信号的一些资料:
备注:关于怎样收集架线上的水珠,我没有找到相关的方法,但是找到一篇研究架线上覆冰的方法,长沙理工大学汤文斌的硕士论文《模拟大气环境下铁路接触网覆冰融冰实验研究》。
T SG 3受电弓的力学模型及运动微分方程*李丰良 孙 焰(长沙铁道学院)提 要 在比较目前常用的几种受电弓的力学模型基础上,根据测试结果选取了一种比较合理的、适用于T SG 3受电弓的力学模型。
并推导了受电弓的运动微分方程。
关键词 计算机模拟 受电弓 微分方程 高速受流中图分类号 U 225Mechanical Models and DifferentialEquation of Motion for TSG 3PantographLi Feng liang Sun Yan(Dep.of M ath.,Ph ys.and M ech.,Changs ha Railway University,Changsh a 410075,China)Abstract When several m echanical models of the pa ntog ra ph in co mmo n use hav e been com-pared,acco rding to the test result,w e select a mo re reaso nable mechanical model fo r the T SG 3pantog raph.The differential equatio ns o f mo tion of the pa ntog ra ph hav e been deriv ed.Keywords co mputer simula tio n;panto g raph;differential equa tion o f mo tion;high speed current feeding受电弓、接触网及机车共同构成一个庞大的系统工程。
要准确地模拟弓网系统的行为,必须分别给出接触网和受电弓的运动微分方程,把机车的影响作为输入激励或将机车与弓网耦合在一起作为一个大系统建立其运动微分方程,然后编写计算机程序进行分析计算。
1 TSG 3受电弓的力学模型弓网计算始于本世纪50年代。
由于当时计算手段的限制,不能进行复杂结构的计算。
于是便出现了各种简化模型。
最初是把接触网当作一个变弹性的弹簧质量系统,把受电弓当作一个悬挂在接触网上的质量块。
这种模型的特点是可以方便地得到解析解。
它可以告诉我们弓网系统有什么主要的力学特征,如存在不稳定速度等。
但由于这一力学模型过于简单,不能定量地讨论弓网的力学行为。
随着计算机的发展,受电弓力学模型出现了所谓的“二系悬挂系统”和“三系悬挂系统”[2]。
接触网也被作为结构进行讨论。
二系悬挂系统考虑了弓头和框架的垂向运动,也考虑了支架弹簧的弹性及阻尼对垂向运动的影响。
但它的不足是把整个框架看作一个整体,忽略了框架的弹性,特别是忽略了柔度较大的上框架的弹性。
其次,它无法讨论受电*铁道部科技发展计划项目(No.97J 14)收稿日期:1998-01-12 李丰良 男 1954年出生 副教授 长沙铁道学院数理力学系 邮编:410075第20卷第6期铁 道 学 报V ol.20 No.61998年12月JO U RN AL O F T HE C HIN A RA ILW AY SO CI ET Y Decembe r 1998弓的侧滚以及机车的侧滚对受流的影响。
实际上,侧滚运动与垂向运动互相影响、互相耦合,非常复杂。
因此这种模型与实际情况相差很大,无实用价值。
三系悬挂系统与二系悬挂系统相比,多考虑了框架的弹性及阻尼。
然而它仍然仅讨论受电弓的垂向运动,无法讨论侧滚运动对受流的影响,也无法讨论受电弓的垂向运动与侧滚运动耦合在一起的力学特性。
由于机车的侧滚运动以及接触导线在受电弓滑板上的往复运动,受电弓的侧滚运动是很大的,不能忽略。
因此由这种力学模型得出的结论好于二系悬挂系统,但与实际相差仍较大,不宜使用。
近年来,对受电弓的讨论还有了有限元模型[3]。
有限元方法在工程上有着广泛的应用,用它来建立受电弓的力学模型比二系悬挂系统、三系统悬挂系统更准确地反映了弓网的力学行为。
但考虑到计算工作量、单元的选取技巧等因素,作者没有采用。
本文根据对国产TSG 3受电弓的实测结果及力学图1 受电弓的力学模型分析,建立了一个5自由度的力学模型。
这5个自由度分别是:弓头2个,用y T ,h T 表示;下框架1个,用T 表示;上框架不能看作刚体,它的一部分随下框架运动,另一部分,即上框架的上半部分还有2个自由度;一个为垂向振动,一个为侧滚振动,分别用y z ,h z 表示。
实测表明:TSG 3受电弓的横向刚度很大,可作为刚性考虑。
受电弓的5个自由度如图1所示。
其受电弓底座随机车的运动有3个分量,分别为x 0、y 0、h 0。
设机车匀速运动,则x 0、y 0、h 0可表示为时间t 的函数:x 0=vt ;y 0=f 1(t );h 0=f 2(t )。
2 TSG 3受电弓的运动微分方程通过对TSG 3受电弓的分析,在升弓高50~180cm 的范围内,推杆升角U ,上框架升角T c 与下臂杆升角T (注:习惯上把下臂杆升角称为受电弓的升角,下面的讨论都使用这个约定)有如下关系[4]U =0.9091T - 3.82 T c =0.75T -0.25(1) 有了上面的关系式就可以写出整个TSG 3受电弓的动能函数、势能函数以及耗散函数。
T SG 3受电弓的总动能为T =T T +T z +T sx +T xb +T TG (2)式中,T T 为弓头的动能;T z 为支架和上框架上部的动能;T sx 为上框架下部的动能;T xb 为下臂杆的动能;T TG 为推杆的动能。
T T =12m T y 2T +12I T h 2T (3)T z =12m z y 2z +12I z h 2z (4)T sx =12I sx T 2+12m sx [y 20+2y 0(l 2U co s U +T ce T c )](5) 在式(5)中,动能的第一项是由于升角T 的变化产生的动能,第二项是由于支座与受电弓的耦合运动产生的动能。
m sx =m s -m z 为上框架下部随下臂杆运动的质量。
Tce 是m sx 的质心到下臂杆上铰的距离。
T xb =12I c 1T 2+12m 1(x 2cl +y 2cl )(6)120 铁 道 学 报第20卷T TG =12(I c 2+m 2a 221)U 2+12m 2(y 20+2a 2U y 0cos U )(7) T SG 3受电弓的势能函数可以写为U =122K T (y T -y z )2+122K T b 20(h T -h z )2+12K z h (h z -h 0)2+12K z (y z -B )(8) T SG 3受电弓的耗散函数为H =122C T (y T -y z )2+122C T b 20(h T -h z )2+12C z h (h z -h 0)2+12C z (y z -B 1)+12M c T2(9)式中,B =l 2sin(0.9091T - 3.82)+l 3sin(0.75T -0.25);B 1=0.9091l 2cos(0.9091T - 3.82)+ 0.75l 3cos(0.75T -0.25)在式(8)、式(9)中:K T ,C T 分别是弓头弹簧的弹性系数和阻尼系数,K z h ,C z h 分别是上框架的侧滚弹性系数和阻尼系数,K z ,C z 分别是上框架的垂向弹性系数和阻尼系数,M c 是下臂杆上阻尼器的阻尼系数。
将动能T 、势能U 以及耗散函数H 代入Lag ra ng e 方程d d t L T L q j +L H L q j +L U L q j -L T L q j=Q j j =1,2,…… 再将方程进行线性化可得m T y T +2C T (y T -y z )+2K T (y T -y z )=-NI T h T +2C T b 20(h T -h z )+2K T b 20(h T -h z )=-N b m z y z +2C T (y z -y T )+C z (yz -B 1T t )+2K T (y z -y T )+K z (y z - 1.6591A 1T 1)=K z A 2I z h z +2C T b 20(h z -h T )+C z h h z +2K T b 20(h z -h T )+K z h h z =C z h h 0+K z h h 0[I cl +m 1a 21+0.8265(I c 2+m 2a 22)+I sx ]T t +M c Tt +C z B 1(B 1T t -y z )+k z B 1(1.6591A 1T t -y z )=-[(0.9091l 2cos(0.9091T 0- 3.82)+0.75a ce co s(0.75T 0-0.25))m sx +m 1a 1cos T 0+0.9091m 2a 2cos(0.9091T0- 3.28)]y 0(10)式中,A 1A 2是将微分方程线性化时得到的两个常数。
将式(10)与文献[1]的接触网的运动微分方程耦合在一起就可得到整个弓网系统的运动微分方程。
对它们进行编程计算就可以对弓网系统进行模拟分析。
分析文献[1]可知,作者所建立的弓网力学模型和所得到的微分方程所考虑的参数是比较全面的。
在这些方程的基础上,利用计算机编程计算,就可以对众多的弓网参数进行讨论分析。
3 参考文献1 李丰良等.接触网的力学模型及运动微分方程.长沙铁道学院学报,1996,14(2)2 于万聚.接触网设计及检测原理.北京:中国铁道出版社,19913 付秀通.轮/轨-弓/网系统耦合动力学数值模拟分析与试验研究:[学位论文].北京:铁道部科学研究院,19964 李丰良.T SG 3受电弓的归算质量.铁道学报,1998,20(2)(责任编辑 姚家兴)121第6期T SG 3受电弓的力学模型及运动微分方程 。