激光干涉测长系统
- 格式:doc
- 大小:171.50 KB
- 文档页数:8
激光干涉测长的基本原理
激光干涉测长是一种非接触式测量方法,其基本原理如下:
1. 使用激光器产生一束单色、相干、窄束的激光。
2. 将激光分为两束,分别称为参考光和测量光。
参考光经过一个反射镜反射,与测量光相向而行。
3. 测量光照射到被测对象上,经过反射后再次与参考光相遇。
4. 参考光和测量光在相遇的地方形成干涉条纹。
这是因为两束光波相干叠加时,会出现干涉现象。
5. 干涉条纹的形态和幅度受到测量光程的影响。
测量光程是测量光从激光器出射到被测对象反射回来的总路程,包括参考光程和被测对象的光程。
6. 通过观察干涉条纹的形态和移动的情况,可以确定测量光程变化的大小,从而计算出被测对象的长度或距离。
激光干涉测长具有高精度、高分辨率、快速响应等特点,广泛应用于工业制造、科学研究、精密测量等领域。

第三章、激光干涉测量干涉测量技术是以光波干涉原理为基础进行高精密测量的一门技术。
20世纪60年代激光的出现,才使干涉测量技术得到了长足的发展。
因为激光出现以前,所用以光源单色灯经过滤光片滤光作为单色光源,其相干长度只有几mm ,且干涉条纹比较模糊,只能微小变化的测量。
激光的出现,由于激光束的高亮度和很长的相干长度(He-Ne 激光器,相干长度几十Km ),使得干涉测量的测量精度、可测量长度都有了质的提高。
激光干涉测量的应用范围很广,可用于长度、位移、角度、形状、介质折射率(通过折射率的变化还可以测量压力、温度等)变化。
激光干涉测量的原理就是将入射激光束分成两束,一束为参考光束,一束为测量光束,测量两束光的光程差的信息或n l kl n l n M j j j N i i i ⇒=-=∆∑∑==211λ。
本章主要介绍激光干涉长度测量、激光干涉微小间隙测量以及光纤干涉传感器所构成的温度、压力测量。
首先介绍激光干涉长度测量。
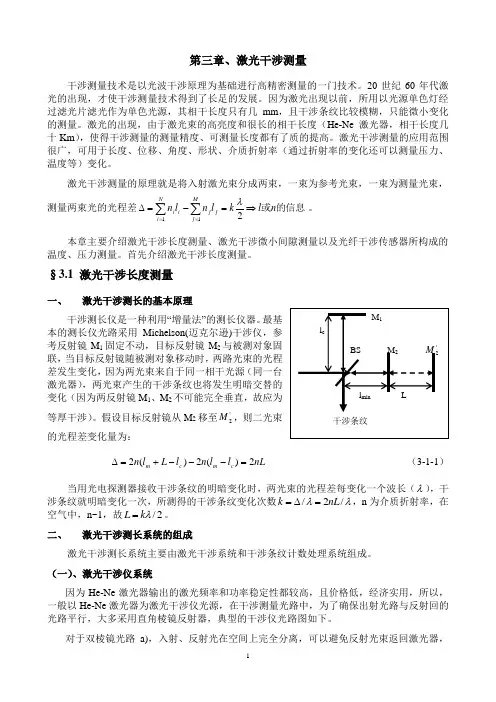
§3.1 激光干涉长度测量一、 激光干涉测长的基本原理干涉测长仪是一种利用“增量法”的测长仪器。
最基本的测长仪光路采用Michelson(迈克尔逊)干涉仪,参考反射镜M 1固定不动,目标反射镜M 2与被测对象固联,当目标反射镜随被测对象移动时,两路光束的光程差发生变化,因为两光束来自于同一相干光源(同一台激光器),两光束产生的干涉条纹也将发生明暗交替的变化(因为两反射镜M 1、M 2不可能完全垂直,故应为等厚干涉)。
假设目标反射镜从M 2移至'2M ,则二光束的光程差变化量为:nL l l n l L l n c m c m 2)(2)(2=---+=∆ (3-1-1) 当用光电探测器接收干涉条纹的明暗变化时,两光束的光程差每变化一个波长(λ),干涉条纹就明暗变化一次,所测得的干涉条纹变化次数λλ/2/nL k =∆=,n 为介质折射率,在空气中,n~1,故2/λk L =。
一、举例描述外差激光干涉仪的测量方法。
光外差干涉是指两只相干光束的光波频率产生一个小的频率差,引起干涉场中干涉条纹的不断扫描,经光电探测器将干涉场中的光信号转换为电信号,由电路和计算机检出干涉场的相位差。
特点:克服单频干涉仪的漂移问题;细分变得容易; 提高了抗干扰性能。
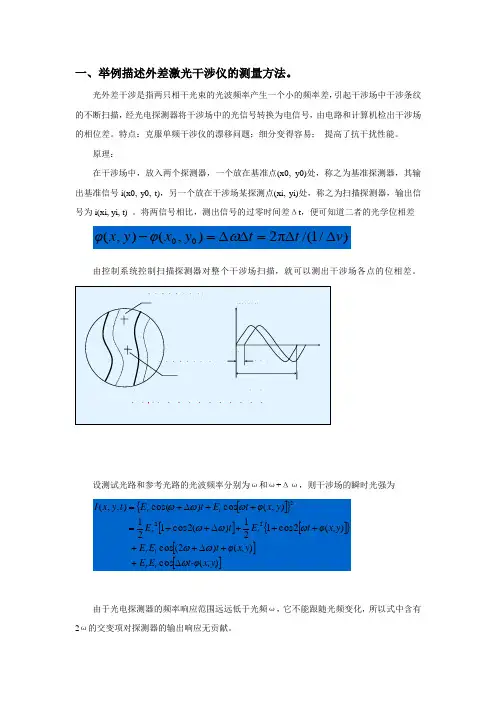
原理:在干涉场中,放入两个探测器,一个放在基准点(x0, y0)处,称之为基准探测器,其输出基准信号i(x0, y0, t),另一个放在干涉场某探测点(xi, yi)处,称之为扫描探测器,输出信号为i(xi, yi, t) 。
将两信号相比,测出信号的过零时间差Δt ,便可知道二者的光学位相差)/1/(π2),(),(00v t t y x φy x φ∆∆=∆∆=-ω由控制系统控制扫描探测器对整个干涉场扫描,就可以测出干涉场各点的位相差。
设测试光路和参考光路的光波频率分别为ω和ω+Δω,则干涉场的瞬时光强为[]{}[][]{}[][])(cos )()2(cos )(2cos 121)(2cos 121),(cos )cos(),,(222x,y t-φE E x,y φt E E x,y φt E t E y x φt E t E t y x I t r t r t r t r ωωωωωωωωω∆++∆+++++∆++=++∆+=由于光电探测器的频率响应范围远远低于光频ω,它不能跟随光频变化,所以式中含有2ω的交变项对探测器的输出响应无贡献。
)],(cos[2/2/),,(22y x φt E E E E t y x i t r t r -∆++∝ω干涉场中某点(x ,y )处光强以低频Δω随时间呈余弦变化 (1)激光外差干涉测长数据处理双频激光器1/4波片准直系统可动角隅棱镜检偏器v探测器前置放大器f2f1f1±Δff2f1f2f1±Δf图4-33双频激光器外差干涉测长原理图偏振分光镜f2-f1f2-(f1±Δf )⎰⎰⎰⎰∆±=±=∆tttt t f NL L t v t vt f 000d 222d 2d 2d λλλλλ所以===由于(2)激光外差干涉测量微振动方解石棱镜及1/4波片的作用是使测量光束的光路既作发射光路,又作接收光路。

多波长半导体激光干涉仪长度测量和应用多波长半导体激光干涉仪(Multiple Wavelength Semiconductor Laser Interferometer, MWL-IF)是一种基于激光干涉原理的长度测量工具,广泛应用于科研、制造业等领域。
本文将探讨多波长半导体激光干涉仪的原理、测量方法以及其在实际应用中的优势。
多波长半导体激光干涉仪利用不同波长的激光进行干涉测量,通过测量干涉光的相位差,从而确定被测物体的长度。
与传统的单波长激光干涉仪相比,多波长半导体激光干涉仪具有更高的测量精度和更宽的测量范围。
多波长半导体激光干涉仪的工作原理是利用不同波长的激光在空间中产生干涉,形成一系列的干涉条纹。
通过测量干涉条纹的位移,可以计算出被测物体的长度。
多波长激光源可以通过改变电流或温度来实现波长的切换,从而得到不同波长的激光。
在测量过程中,多波长半导体激光干涉仪需要进行相位差的测量。
常用的方法有相位移法、相位计数法等。
相位移法是通过改变干涉光程的长度,使干涉条纹发生位移,从而测量出相位差。
相位计数法则是通过计算干涉光的相位变化来确定相位差的大小。
多波长半导体激光干涉仪在实际应用中具有许多优势。
首先,多波长激光源可以提供更高的测量精度,因为不同波长的激光在空间中具有不同的干涉条纹密度,可以提高测量的分辨率。
其次,多波长激光干涉仪具有更宽的测量范围,可以测量大范围内的长度变化。
此外,多波长激光干涉仪还可以实现非接触式测量,减少了对被测物体的损伤。
多波长半导体激光干涉仪在制造业中有着广泛的应用。
例如,在半导体芯片制造过程中,多波长激光干涉仪可以用于测量芯片的厚度和平整度,保证芯片的质量。
在微纳加工领域,多波长激光干涉仪可以用于测量微小结构的尺寸,提高加工的精度。
此外,多波长激光干涉仪还可以应用于光学元件的制造和检测、光纤通信的测量等领域。
多波长半导体激光干涉仪是一种高精度、宽范围的长度测量工具,具有广泛的应用前景。
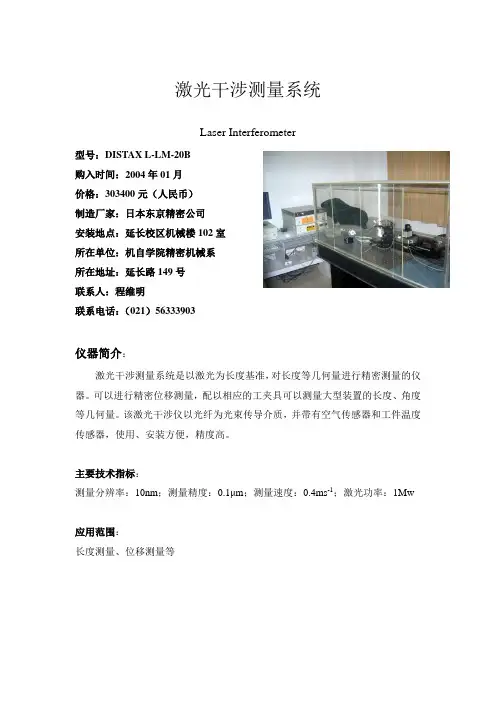
激光干涉测量系统
Laser Interferometer
型号:DISTAX L-LM-20B
购入时间:2004年01月
价格:303400元(人民币)
制造厂家:日本东京精密公司
安装地点:延长校区机械楼102室
所在单位:机自学院精密机械系
所在地址:延长路149号
联系人:程维明
联系电话:(021)56333903
仪器简介:
激光干涉测量系统是以激光为长度基准,对长度等几何量进行精密测量的仪器。
可以进行精密位移测量,配以相应的工夹具可以测量大型装置的长度、角度等几何量。
该激光干涉仪以光纤为光束传导介质,并带有空气传感器和工件温度传感器,使用、安装方便,精度高。
主要技术指标:
测量分辨率:10nm;测量精度:0.1μm;测量速度:0.4ms-1;激光功率:1Mw
应用范围:
长度测量、位移测量等。
激光干涉仪原理内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.激光干涉仪是以干涉测量法为原理,利用激光作为长度基准,对数控设备(加工中心、三坐标测量机等)的位置精度(定位精度、重复定位精度等)、几何精度(俯仰扭摆角度、直线度、垂直度等)进行精密测量的精密测量仪器。
激光具有高强度、高度方向性、空间同调性、窄带宽和高度单色性等优点。
目前常用来测量长度的干涉仪,主要是以迈克尔逊干涉仪为主,并以稳频氦氖激光为光源,构成一个具有干涉作用的测量系统。
激光干涉仪可配合各种折射镜、反射镜等来作线性位置、速度、角度、真平度、真直度、平行度和垂直度等测量工作,并可作为精密工具机或测量仪器的校正工作。
英文名称:laser interferometer(激光干涉仪)激光干涉仪原理如下图所示:一个角锥反射镜紧紧固定在分光镜上,形成固定长度参考光束。
另一个角锥反射镜相对于分光镜移动,形成变化长度测量光束。
从激光头射出的激光光束①具有单一频率,标称波长为633nm,长期波长稳定性(真空中)优于0.05ppm。
当此光束到达偏振分光镜时,被分成两束光——反射光束②和透射光束③。
这两束光被传送到各自的角锥反射镜中,然后反射回分光镜中,在嵌于激光头中的探测器中形成干涉光束④。
如果两光程差不变化,探测器将在相长干涉和相消干涉的两端之间的某个位置观察到一个稳定的信号。
如果两光程差发生变化,每次光路变化时探测器都能观察到相长干涉和相消干涉两端之间的信号变化。
这些变化(条纹)被数出来,用于计算两光程差的变化。
测量的长度等于条纹数乘以激光波长的一半。
激光干涉仪种类:激光干涉仪有单频的和双频的两种。
单频激光干涉仪:从激光器发出的光束,经扩束准直后由分光镜分为两路,并分别从固定反射镜和可动反射镜反射回来会合在分光镜上而产生干涉条纹。
XL-80激光干涉仪系统机床及坐标测量机按照国际标准验证机床和坐标测量机的精品工具研究及计量供校准和研究实验室使用的可溯源性测量运动系统独特动态性能,实现高速、高分辨率检测Renishaw设计、制造和提供激光干涉仪系统已有二十多年的历史。
其生产的ML10激光干涉仪系统已经成为使用精度及可靠性的标准。
新型XL-80激光干涉仪系统在便携性、系统精度及动态测量性能方面获得显著提高。
其使用更快捷、方便,且保留了纯粹干涉测量系统的优点,该系统结合了成熟的技术及丰富的经验,使得Renishaw激光系统成为全球用户的首选系统。
XL-80保留了Renishaw产品在日常使用中、在紧要之处展现出高精度、可靠性和耐用性等重要优点。
更轻巧的激光测量及校准2X L激光测量系统的性能提升,更广泛地适合各类客户的测量选择。
本系统尺寸及重量显著小于已有系统,便携性更强,使用更方便,以便贵公司领先于同行。
XL-80激光系统X L -80激光系统可以产生极其稳定的激光光束,采用的波长可溯源至国家和国际标准。
激光稳频精度为1年内±0.05 p p m ,1小时内 ±0.02 ppm 。
这种优异的性能是通过动态热控制技术将激光管长度变化控制在纳米范围内而完成的。
在整个环境范围内,即0 - 40 °C (32 - 104 °F )及650 - 1150 mbar ,保证±0.5 ppm 的线性测量精度。
读数以50 kHZ 频率读取,最高线性测量速度可达 4 m/s ,即使在最高速度下线性分辨率仍可达1 nm 。
由于XL 系统的所有测量项目(不仅仅是线性测量)均采用激光干涉原理,您可以充分信赖所有的测量精度。
该新型系统的基础组件是一个轻型激光头 (XL-80) 和一个独立的补偿单元系统 (XC-80)XL80和XC80可经由USB 直接与计算机连接,无需单独的接口。
激光系统的标准配置还具有一个辅助模拟信号输出,正交输出为工厂设定选项。
激光干涉测长B08340218 吴国斌 08测控(2)班干涉测量技术是以光的干涉现象为基础进行测量的一门技术。
在激光出现以后,加之电子技术和计算机技术的发展,隔振与减振条件的改善,干涉技术得到了长足进展。
干涉测量技术大多数是非接触测量,具有很高的测量灵敏度和精度,而且应用范围十分广泛。
常用的干涉仪有迈克尔逊干涉仪、马赫—曾德干涉仪、菲索干涉仪、泰曼—格林干涉仪等;70年代以后,具有良好抗环境干扰能力的外差干涉仪,如双频激光干涉仪、光纤干涉仪也很快的发展了起来。
激光干涉仪越来越实用,其性能越来越稳定,结构也越来越紧凑。
干涉测长的基本原理激光干涉测长的基本光路是一个迈克尔逊干涉仪(如图1示),用干涉条纹来反映被测量的信息。
干涉条纹是接收面上两路光程差相同的点连成的轨迹。
激光器发出的激光束到达半透半反射镜P 后被分成两束,当两束光的光程相差激光半波长的偶数倍时,它们相互加强形成亮条纹;当两束光的光程相差半波长的奇数倍时,它们相互抵消形成暗条纹。
两束光的光程差可以表示为j MJ j Ni i i l n l n ∑∑==-=∆11(1)式中j i n n ,分别为干涉仪两支光路的介质折射率;j i l l ,分别为干涉仪两支光路的几何路程。
将被测物与其中一支光路联系起来,使反光镜M 2沿光束2方向移动,每移动半波长的长度,光束2的光程就改变了一个波长,于是干涉条纹就产生一个周期的明、暗变化。
通过对干涉条纹变化的测量就可以得到被测长度。
被测长度L 与干涉条纹变化的次数N 和干涉仪所用光源波长λ之间的关系是2λNL = (2)式(2)是激光干涉测长的基本测量方程。
从测量方程出发可以对激光干涉测长系统进行基本误差分析δλδδλλ+=∆+∆=∆N L N N L L 即(3)式中δλδδ和N ,L 分别为被测长度、干涉条纹变化计数和波长的相对误差。
这说明被测长度的相对误差由两部分组成,一部分是干涉条纹计数的相对误差,另一部分是波长也就是频率的相对误差。
前者是干涉测长系统的设计问题,后者除了激光稳频技术有关之外还与环境控制,即对温度、湿度、气压等的控制有关。
因此激光干涉测长系统测量误差必须根据具体情况进行具体分析。
激光干涉测长系统的组成除了迈克尔逊干涉仪以外,激光干涉测长系统还包括激光光源,可移动平台,光电显微镜,光电计数器和显示记录装置。
激光光源一般是采用单模的He-Ne 气体激光器,输出的是波长为632.8纳米的红光。
因为氦氖激光器输出激光的频率和功率稳定性高,它以连续激励的方式运转,在可见光和红外光区域里可产生多种波长的激光谱线,所以氦氖激光器特别适合用作相干光源。
为提高光源的单色性,对激光器要采取稳频措施。
可移动平台携带着迈克迈克尔逊干涉仪图1 激光干涉测长仪的原理图尔逊干涉仪的一块反射镜和待测物体一起沿入射光方向平移,由于它的平移,使干涉仪中的干涉条纹移动。
光电显微镜的作用是对准待测物体,分别给出起始信号和终止信号,其瞄准精度对测量系统的总体精度有很大影响。
光电计数器则对干涉条纹的移动进行计数。
显示和记录装置是测量结果的输出设备,显示和记录光电计数器中记下的干涉条纹移动的个数及与之对应的长度,可以用专用计算机或也可以用通用的PC 机替代。
迈克尔逊干涉仪是激光干涉测长系统的核心部分,其分光器件、反射器件和总体布局有若干可能的选择。
干涉仪的分光器件原理可以分为分波阵面法、分振幅法和分偏振法。
常用的分光器有分振幅平行平板分光器(图1)和立方棱镜分光器。
其中立方棱镜分光器上还可以胶合干涉仪的其他元件,组成整体式干涉仪布局,能与系统的机座牢固连接减少误差。
在偏振干涉仪系统中需要采用偏振分光器(参见图6B 2),它由一对玻璃棱镜相胶合而成,在其中一块棱镜的胶合面上蒸镀偏振分光膜,得到高度偏振的S 分量反射光和P 分量透射光。
偏振分光器也可由晶轴正交的偏光棱镜组成,如沃拉斯顿棱镜。
干涉仪中常用的反射器件中最简单的是平面反射器,这种器件的偏转将产生附加的光程差,在采用多次反射以提高测量精度的系统或长光程干涉仪中此项误差不可忽略。
角锥棱镜反射器(图2a )的反射光与入射光反向平行,具有抗偏摆和俯仰的性能,可以消除偏转带来的误差,是干涉仪中常用的器件。
直角棱镜反射器(图2b )只有两个反射面,加工起来比较容易,并只对一个方向的偏转敏感。
猫眼反射器(图2c )由一个透镜L 和一个凹面反射镜M 组成,反射镜放在透镜的焦点处,若反射镜的曲率中心C ′与透镜的光心C 重合,当透镜和反射镜一起绕着C 旋转时,光程保持不变。
猫眼反射器的优点是容易加工和不影响偏振光的传输,而且在光程不太长时还可以用平面反射镜代替凹面反射镜,更容易加工与调整。
激光干涉仪光路的总体布局也有若干可能的选择。
在激光干涉仪光路设计中,一般遵循C正入射斜入射(a) (b)(c)图2 (a) 角锥棱镜反射器;(b) 直角棱镜反射器;(c) 猫眼反射器共路原则,即测量光束与参考光束尽量走同一路径,以避免大气等环境条件对两条光路影响不一致而引起的测量误差。
典型光路布局有使用角锥棱镜反射器的常用的光路布局,如图3示。
图3a 中角锥棱镜可使入射光和反射光在空间分离一定距离,这种光路可避免反射光束返回激光器,以免返回光束引起激光输出频率和振幅的不稳定。
角锥棱镜具有抗偏摆和俯仰的性能,可以消除测量镜偏转带来的误差。
但是这种成对使用的角锥棱镜要求配对加工,而且加工精度要求高,因此也可采用一个角锥棱镜作为可动反射镜(图3b )。
参考光路中还可用平面反射镜作固定反射镜。
使用一个角锥棱镜作可动反射器还可采用其他几种光路。
如图3c 所示的双光束干涉仪,它也是一种较理想的光路布局,基本上不受镜座多余自由度的影响,而且光程增加一倍。
其它光路布局还有整体式布局、光学倍频布局、零光程差的结构布局等,各有其特点和用途。
激光干涉测长系统的另一个重要组成部分是干涉条纹计数与测量结果处理系统。
干涉仪在实际测量位移时,由于测量反射镜在测量过程中可能需要正反两个方向的移动,或由于外界振动,导轨误差等干扰,使反射镜在正向移动中,偶然有反向移动,所以干涉仪中需设计方向判别部分,将计数脉冲分为加和减两种脉冲。
当测量镜正向移动时所产生的脉冲为正脉冲,而反向移动时所产生的脉冲为减脉冲。
将这两种脉冲送入可逆计数器进行可逆计算就可以获得真正的位移值。
如果测量系统没有判向能力,光电接收器接收的信号是测量镜正反两方向移动的总和,就不代表真正的位移值。
另外为了提高仪器分辨力,还要对干涉条纹进行细分。
为达到这些目的,干涉仪必须有两个位相差为90度的电信号输出,一个按光程的正弦变化,一个按余弦变化。
所以,移相器也是干涉仪测量系统的重要组成部分。
常用的移相方法有机械移相(图4),翼形板移相,金属膜移相和偏振法移相。
(a)(b)图3 (a) 双角锥棱镜光路;(b) 单角锥棱镜光路;(c) 双光程光路干涉条纹计数时,通过移相获得两路相差π/2的干涉条纹的光强信号,该信号经放大,整形,倒向及微分等处理,可以获得四个相位依次相差π/2的脉冲信号(图5)。
若将脉冲排列的相位顺序在反射镜正向移动时定为1、2、3、4,反向移动时定为1、4、3、2;后续的逻辑电路便可以根据脉冲1后面的相位是2还是4判断脉冲的方向,并送入加脉冲门或减脉冲门,便实现了判向的目的。
同时经判向电路后,将一个周期的干涉信号变成四个脉冲输出信号。
实现干涉条纹的四倍频计数,相应的测量方程变为8λN L = (4)激光外差干涉测长技术激光的发明和应用使干涉测长技术提高了精度,扩大了量程并且得到了普及,但是使干涉测长技术走出实验室进入车间,成为生产过程质量控制设备的是激光外差干涉测长技术,具体来讲就是双频激光干涉仪。
ID 图4 机械法移相原理图1-干涉条纹;2-移相系统;3-光电接收器;4-放大器;5-倒相 6-微分电路;7-可逆计数器;8-计算机;9-显示器图6-5 判向计数原理激光干涉仪产生的干涉条纹变化频率与测量反射镜的运动速度有关,在从静止到运动再回到静止的过程中对应着频率从零到最大值再返回到零的全过程,因此光强转化出的直流电信号的频率变化范围也是从零开始的。
这样的信号只能用直流放大器来放大处理。
但是在外界环境干扰下,干涉条纹的平均光强会有很大的变化,以至于造成计数的错误。
所以一般的激光干涉仪抗干扰能力差,只能在恒温防振的条件下使用。
为了克服以上缺点,可以在干涉仪的信号中引入一定频率的载波,使被测信号通过这一载波来传递,使得干涉仪能够采用交流放大,隔绝外界环境干扰造成的直流电平漂移。
利用这种技术设计的干涉仪称作外差干涉仪,或交流干涉仪。
产生干涉仪载波信号的方法有两种,一种是使参与干涉的两束光产生一个频率差,这样的两束光相干的结果会出现光学拍的现象,转化为电信号以后得到差频的载波,另一种是在干涉仪的参考臂中对参考光束进行调制,与测量臂的光干涉直接生成载波信号。
前者称为是光外差干涉,而后者常常称作是准外差干涉。
本节以前一种原理的双频激光干涉仪为主来介绍激光外差干涉测长技术。
双频激光干涉仪的光路如图6所示,其中氦氖激光器上沿轴向施加以磁场,由于塞曼效应激光被分裂成有一定频率差的左旋偏振光1f 和右旋偏振光2f (常用的双频激光干涉仪把这一频差设计成MHz 5.1)。
通过1/4波片后,1f 和2f 变成相互垂直的线偏振光21νν和,又被分束镜1B 分成两束,其中一束反射到主截面与相互垂直的两线偏振光偏振方向成45°的检偏器1P ,产生拍频信号。
光电探测器1D 对两倍光频的和频信号没有响应,接收到的只是频率为ν∆的参考差频信号。
另一束光透过分束镜1B 向前传播进入偏振分光棱镜2B 后,偏振方向垂直纸面的1ν被完全反射,偏振方向在纸面内的2ν完全透射。
再经由参考臂反射镜1M 和测量臂反射镜2M 反射回来合束,通过类似检偏器1P 的检偏器2P ,产生的拍频信号被光电探测器2D 接收。
由于测量反射镜2M 以速度V运动,光的多普勒效应使由2M 返回光的频率产生多普勒频移Dν∆±(正负号取决于测量反射镜的运动方向),2D 接收到的测量信号频率为D νν∆±∆。
将测量信号与参考信号进行同步相减便得到多普勒频移D ν∆±,多普勒频移对测量时间积分,也就是说进行累计计数就可以测出测量反射镜的位移量。
测量反射镜运动产生的多普勒频移可以表示为 λννVc V D 22==∆ (5) 式中c 为光速,λ为光波长。
若测量所用时间为t ,则测量镜的位移量L 可由下式计算N dt dt Vdt L tttD 22200λνλνλ=∆=∆==⎰⎰⎰(6)式中N 为记录下来的累计脉冲数。
双频激光干涉仪的被测信号是作为频率调制加在载频之上的,一般应小于载频的三分之D 2D 1图6 双频激光干涉仪光路图一,因此对应的多普勒频移不能超过MHz 5.0,允许的最大测量速度约为s mm /150。