永磁无刷电机控制原理图与pcb
- 格式:pdf
- 大小:1.09 MB
- 文档页数:2

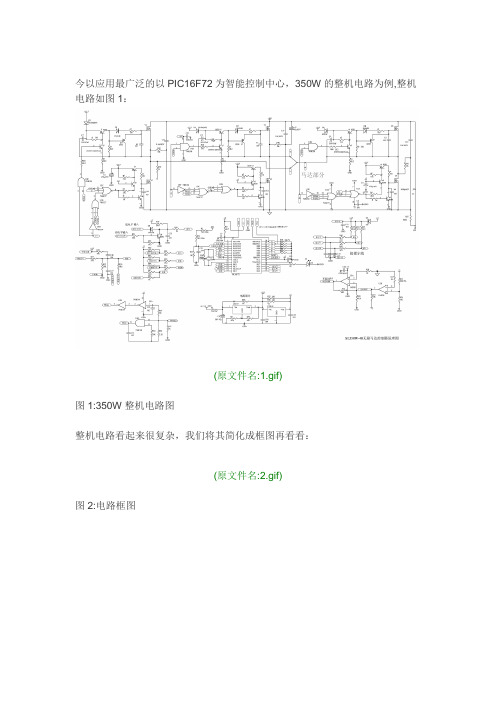
今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1:(原文件名:1.gif)图1:350W整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:(原文件名:2.gif)图2:电路框图电路大体上可以分成五部分:一、电源稳压,供应部分;二、信号输入与预处理部分;三、智能信号处理,控制部分;四、驱动控制信号预处理部分;五、功率驱动开关部分。
下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。
(原文件名:3.gif)图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。
内部软件资源我们在软件部分讲解,这里并不需要很关心。
各引脚应用如下:1:MCLR复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。
正常运转时电压应在0-1.5V左右3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。
正常时电压应在3V以上4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。
5:模拟/数字量输入口:刹车信号电压输入口。
可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。
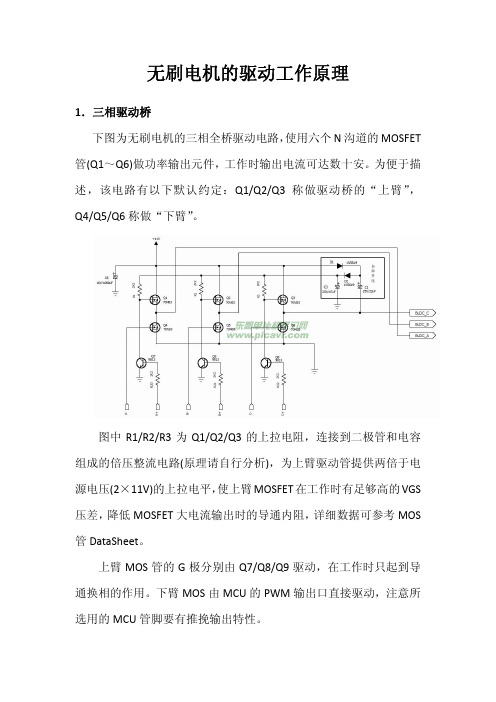
无刷电机的驱动工作原理1.三相驱动桥下图为无刷电机的三相全桥驱动电路,使用六个N沟道的MOSFET管(Q1~Q6)做功率输出元件,工作时输出电流可达数十安。
为便于描述,该电路有以下默认约定:Q1/Q2/Q3称做驱动桥的“上臂”,Q4/Q5/Q6称做“下臂”。
图中R1/R2/R3为Q1/Q2/Q3的上拉电阻,连接到二极管和电容组成的倍压整流电路(原理请自行分析),为上臂驱动管提供两倍于电源电压(2×11V)的上拉电平,使上臂MOSFET在工作时有足够高的VGS压差,降低MOSFET大电流输出时的导通内阻,详细数据可参考MOS管DataSheet。
上臂MOS管的G极分别由Q7/Q8/Q9驱动,在工作时只起到导通换相的作用。
下臂MOS由MCU的PWM输出口直接驱动,注意所选用的MCU管脚要有推挽输出特性。
驱动桥全部选用N沟道MOSFET的好处:大电流N沟道MOS可供选择的型号众多,货源充足便于购买,使用的MOSFET类型减少,间接降低采购元件的难度。
在图1中,上臂MOS管经过Q7/Q8/Q9驱动,逻辑电平和下臂MOS 刚好相反,这样的好处是,MCU上电时I/O默认为1,上臂MOS不会导通。
只有下臂MOS导通,因此不会有电流经过驱动桥,消除了潜在电路隐患。
C8是整个电调的电源滤波电容,使用中一定要接上,否则无刷电机的反电动势叠加在电源上不能被滤除,由倍压电路整流后的电压高达30V左右,己接近MOSFET的VGS上限,可能会损坏MOSFET。
2.反电动势波形上图所示为无刷电机运转中的理想反电动势波形,红线标出来的是反电动势的过零点。
两个虚线间是60度电气角度,不要理解成电机的机械角度。
常用航模电机属于无刷三相六拍电机,每个电周期有六个状态。
星形接法中(Y形)在每一时刻电机的通电线圈只有两相,另一相线圈悬空,悬空的线圈会产生反电动势,反电动势来源于电机磁体旋转而造成本线圈切割磁力线和另两相线圈通电时的互感。

无刷电机工作及控制原理(图解)左手定则,这个就是电机转动受力分析得基础,简单说就就是磁场中得载流导体,会受到力得作用。
让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力得方向,我相信喜欢玩模型得人都还有一定物理基础得哈哈.让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生得电动势方向。
为什么要讲感生电动势呢?不知道大家有没有类似得经历,把电机得三相线合在一起,用手去转动电机会发现阻力非常大,这就就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生与转动方向相反得力,大家就会感觉转动有很大得阻力。
不信可以试试.三相线分开,电机可以轻松转动三相线合并,电机转动阻力非常大右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指得那一端就就是通电螺旋管得N极。
状态1当两头得线圈通上电流时,根据右手螺旋定则,会产生方向指向右得外加磁感应强度B(如粗箭头方向所示),而中间得转子会尽量使自己内部得磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。
当转子磁场方向与外部磁场方向垂直时,转子所受得转动力矩最大.注意这里说得就是“力矩”最大,而不就是“力”最大。
诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。
补充一句,力矩就是力与力臂得乘积。
其中一个为零,乘积就为零了.当转子转到水平位置时,虽然不再受到转动力矩得作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管得电流方向,如下图所示,转子就会继续顺时针向前转动,状态2如此不断改变两头螺线管得电流方向,内转子就会不停转起来了。
改变电流方向得这一动作,就叫做换相。
补充一句:何时换相只与转子得位置有关,而与其她任何量无直接关系。
第二部分:三相二极内转子电机一般来说,定子得三相绕组有星形联结方式与三角联结方式,而“三相星形联结得二二导通方式”最为常用,这里就用该模型来做个简单分析。

pcb电机原理
PCB电机,也称为BLDC电机,是一种基于霍尔效应的三相无刷电机。
其工作原理如下:
1. 在这种电机中,电子元件被集成在单个PCB板上,包括电机驱动电路、控制逻辑和运动传感器。
2. 通过收集旋转磁铁的反馈信号,控制电路可以确定转子位置,并产生正确的电流驱动。
3. 这种电机使用磁铁作为外围零件,采用三个线圈加以控制。
4. BLDC电机不仅可以精确控制旋转速度和转矩,还可以通过编码器实现位置反馈。
以上信息仅供参考,如有需要,建议咨询专业技术人员。

无刷电机工作及控制原理(图解)左手定则,这个是电机转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用。
让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈。
让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。
为什么要讲感生电动势呢?不知道大家有没有类似的经历,把电机的三相线合在一起,用手去转动电机会发现阻力非常大,这就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生和转动方向相反的力,大家就会感觉转动有很大的阻力。
不信可以试试。
三相线分开,电机可以轻松转动三相线合并,电机转动阻力非常大右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
状态1当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。
当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大。
注意这里说的是“力矩”最大,而不是“力”最大。
诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。
补充一句,力矩是力与力臂的乘积。
其中一个为零,乘积就为零了。
当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,状态2如此不断改变两头螺线管的电流方向,内转子就会不停转起来了。
改变电流方向的这一动作,就叫做换相。
补充一句:何时换相只与转子的位置有关,而与其他任何量无直接关系。
第二部分:三相二极内转子电机一般来说,定子的三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最为常用,这里就用该模型来做个简单分析。
电动车无刷控制器电路图[高清]今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1:(原文件名:1.gif)图1:350W整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:(原文件名:2.gif)图2:电路框图电路大体上可以分成五部分:一、电源稳压,供应部分;二、信号输入与预处理部分;三、智能信号处理,控制部分;四、驱动控制信号预处理部分;五、功率驱动开关部分。
下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。
(原文件名:3.gif)图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。
内部软件资源我们在软件部分讲解,这里并不需要很关心。
各引脚应用如下:1:MCLR复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。
正常运转时电压应在0-1.5V左右3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。
正常时电压应在3V以上4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。
5:模拟/数字量输入口:刹车信号电压输入口。
可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。