《电力拖动自动控制系统》第三版陈伯时详解
- 格式:ppt
- 大小:2.60 MB
- 文档页数:41
第一章:闭环控制的直流调速系统00000欧阳家百(2021.03.07)1-1 为什么PWM-电动机系统比晶闸管-电动机系统能够获得更好的动态性能?答:PWM系统与V-M系统相比,在很多方面有较大的优越性:(1)主电路线路简单,需用的功率器件少;(2)开关频率高,电流容易连续,谐波少,电机损耗及发热都较小;(3)低速性能好,稳速精度高,调速范围宽,可达1:10000左右;(4)若与快速响应的电动机配合,则系统频带宽,动态响应快,动态抗扰能力强;(5)功率开关器件工作在开关状态,导通损耗小,当开关频率适当时,开关损耗也大,因而装置效率较高;(6)直流电源采用不控整流时,电网功率因数比相控整流器高;1-2 试分析有制动通路的不可逆PWM变换器进行制动时,两个VT是如何工作的。
答:如图P13,1-17,制动状态时,先减小控制电压,使U g1的正脉冲变窄,负脉冲变宽,从而使平均电枢电压U d 降低。
但是,由于机电惯性,转速和反电动势还来不及变化,因而造成E >U d ,很快使电流i d 反向,VD 2截止,在t on ≤t <T 时,U g2变正,于是VT 2导通,反向电流沿回路3流通,产生能耗制动作用。
在T≤t <T+t on (即下一周期的0≤t <T on )时,VT 2关断,-i d 沿回路4经VD 1续流,向电源回馈制动,与此同时,VD 1两端压降钳住VT 1使它不能导通。
在制动状态中,VT 2和VD 1轮流导通,而VT 1始终是关断的。
有一种特殊状态,即轻载电动状态,这时平均电流较小,以致在VT 1关断后i d 经VD 2续流时,还没有达到周期T,电流已经衰减到零,这时VD 2两端电压也降为零,VT 2便提前导通了,使电流反向,产生局部时间的制动作用。
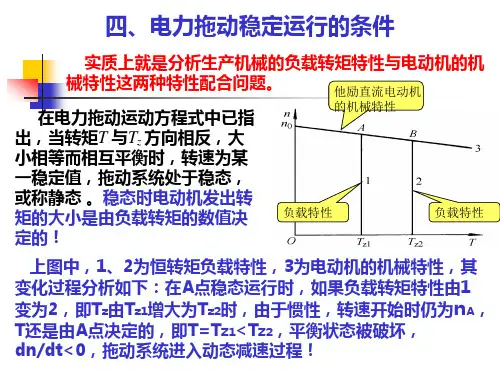
1-3 调速范围和静差率的定义是什么?调速范围、静差速降和最小静差率之间有什么关系?为什么说“脱离了调速范围,要满足给定的静差率也就容易得多了”?答:生产机械要求电动机提供的最高转速和最低转速之比叫做调速范围,用字母D 表示,即:当系统在某一转速下运行时,负载由理想空载增加到额定值时所对应的转速降落Δn N 与理想空载转速n 0之比,称作静差率s ,即0n n s N∆=。
电力拖动自动控制系统(第三版)(陈伯时)主编大学引言电力拖动自动控制系统在现代工业中起着至关重要的作用,它能够有效地控制和操作各种电动设备,减轻人工劳动强度,提高工作效率和安全性。
本文档将介绍《电力拖动自动控制系统》第三版,该版本由陈伯时主编,涵盖了大学教学的相关内容。
1. 拖动系统的基本原理1.1 拖动系统的定义拖动系统是指通过电动机、传动装置和控制装置来实现对机械装置或工业设备的控制和操作。
它可实现运动的平稳性、快速性和精准性,广泛应用于工业生产中。
1.2 拖动系统的组成拖动系统主要由电动机、传动机构和控制系统三部分组成。
电动机提供动力,传动机构将电动机的转速和转矩传递给被控对象,控制系统负责控制和调节拖动系统的运行。
2. 电动机的选择与控制2.1 电动机的分类根据拖动系统的要求,电动机可以分为直流电动机和交流电动机两种。
直流电动机具有调速范围广、起动转矩大等优点,交流电动机具有结构简单、可靠性高等特点。
2.2 电动机的控制电动机的控制包括起动、制动、调速和定位等方面。
常用的电动机控制方法有电压、电流和频率控制法,通过改变电机终端电压、电流和频率来实现电动机的控制和调节。
3. 传动装置的选择与设计3.1 传动装置的分类传动装置主要分为机械传动和液压传动两种。
机械传动包括齿轮传动、皮带传动和链传动等,液压传动则利用液压系统将液压压力转化为机械能传递。
3.2 传动装置的设计原则传动装置的设计应考虑到传动效率、传动可靠性和传动误差等因素,合理选择传动比和传动元件,以实现拖动系统的高效运行。
4. 拖动系统的控制策略4.1 开环控制开环控制是一种基本的控制策略,通过设定输入信号来控制输出信号,但无法对输出信号进行实时调节和修正。
它适用于一些简单的拖动系统。
4.2 闭环控制闭环控制是一种反馈控制策略,通过监测和比较输出信号和参考信号的差异,实现实时调节和修正。
它适用于复杂的拖动系统,能够提高控制的稳定性和精确性。
第一章:闭环控制的直流调速系统1-1 为什么PWM-电动机系统比晶闸管-电动机系统能够获得更好的动态性能?答:PWM系统与V-M系统相比,在很多方面有较大的优越性:(1)主电路线路简单,需用的功率器件少;(2)开关频率高,电流容易连续,谐波少,电机损耗及发热都较小;(3)低速性能好,稳速精度高,调速范围宽,可达1:10000左右;(4)若与快速响应的电动机配合,则系统频带宽,动态响应快,动态抗扰能力强;(5)功率开关器件工作在开关状态,导通损耗小,当开关频率适当时,开关损耗也大,因而装置效率较高;(6)直流电源采用不控整流时,电网功率因数比相控整流器高;1-2 试分析有制动通路的不可逆PWM变换器进行制动时,两个VT是如何工作的。
答:如图P13,1-17,制动状态时,先减小控制电压,使U g1的正脉冲变窄,负脉冲变宽,从而使平均电枢电压U d降低。
但是,由于机电惯性,转速和反电动势还来不及变化,因而造成E>U d,很快使电流i d反向,VD2截止,在t on≤t<T 时,U g2变正,于是VT2导通,反向电流沿回路3流通,产生能耗制动作用。
在T ≤t<T+t on(即下一周期的0≤t<T on)时,VT2关断,-i d沿回路4经VD1续流,向电源回馈制动,与此同时,VD1两端压降钳住VT1使它不能导通。
在制动状态中,VT 2和VD 1轮流导通,而VT 1始终是关断的。
有一种特殊状态,即轻载电动状态,这时平均电流较小,以致在VT 1关断后i d 经VD 2续流时,还没有达到周期T,电流已经衰减到零,这时VD 2两端电压也降为零,VT 2便提前导通了,使电流反向,产生局部时间的制动作用。
1-3 调速范围和静差率的定义是什么?调速范围、静差速降和最小静差率之间有什么关系?为什么说“脱离了调速范围,要满足给定的静差率也就容易得多了”? 答:生产机械要求电动机提供的最高转速和最低转速之比叫做调速范围,用字母D 表示,即:m in m axn n D =当系统在某一转速下运行时,负载由理想空载增加到额定值时所对应的转速降落Δn N 与理想空载转速n 0之比,称作静差率s ,即0n n s N∆=。