基于人工神经网络的系统辨识与控制
- 格式:ppt
- 大小:1.05 MB
- 文档页数:30
神经网络在系统辨识中的应用摘要应用于自动控制系统的神经网络算法很多,特点不一,对于非线性系统辨识的研究有一定影响。
本文就BP网络算法进行了着重介绍,并点明了其收敛较慢等缺点,进而给出了改进算法,说明了建立在BP算法基础上的其他算法用于非线性系统辨识的可行性与有效性。
关键词神经网络BP算法;辨识;非线性系统前言神经网络是一门新兴的多学科研究领域,它是在对人脑的探索中形成的。
神经网络在系统建模、辨识与控制中的应用,大致以1985年Rumelhart的突破性研究为界。
在极短的时间内,神经网络就以其独特的非传统表达方式和固有的学习能力,引起了控制界的普遍重视,并取得了一系列重要结果。
本文以神经网络在系统辨识中的应用作一综述,而后着重介绍BP网络算法,并给出了若干改进的BP算法。
通过比较,说明改进算法具有诸多优点及用于非线性系统辨识[1]的可行性与有效性。
1 神经网絡用于系统辨识的原理及现状神经网络在自动控制系统中的应用已有多年。
目前,利用神经网络建立动态系统的输入/输出模型的理论及技术,在许多具体领域的应用得到成功,如化工过程、水轮机、机器入手臂、涡轮柴油发动机等。
运用神经网络的建模适用于相当于非线性特性的复杂系统[2]。
目前系统辨识中用得最多的是多层前馈神经网络[1]。
我们知道,自动控制系统中,一个单隐层或双隐层的具有任意数目神经元的神经网络,可以产生逼近任意函数的输入/输出映射。
但网络的输入节点数目及种类(延迟输入和输出)、隐层节点的个数以及训练所用的算法对辨识精度和收敛时间均有影响。
一般根据系统阶数取延迟输入信号,根据经验确定隐层节点数,然后对若干个神经网络进行比较,确定网络中神经元的合理数目。
现在用得较多的多层前馈神经网络的学习算法是反向传播算法(Back Propagation),即BP算法。
但BP算法收敛速度较慢,后面将会进一步讨论。
1.1 神经网络的结构感知器是最简单的前馈网络,它主要用于模式分类。
控制系统设计中的模型鉴别方法综述在控制系统设计中,模型鉴别方法是一项关键性工作。
模型鉴别方法可以帮助工程师准确地识别出待控系统的数学模型,为后续的控制器设计和性能优化提供基础。
本文将对控制系统设计中常用的模型鉴别方法进行综述。
一、最小二乘法最小二乘法是一种常见的模型鉴别方法,它通过最小化误差的平方和来拟合实际测量数据和理论模型之间的差异。
最小二乘法可以用于线性和非线性模型的鉴别。
对于线性模型,最小二乘法可以通过矩阵运算求解最优解。
而对于非线性模型,最小二乘法可以通过迭代优化算法求解。
二、频域方法频域方法是一种将系统响应与频率特性相关联的模型鉴别方法。
它通常基于输入和输出信号的频谱分析,可以用于连续时间和离散时间系统。
频域方法可以采用傅里叶变换、拉普拉斯变换等数学工具,通过求解传递函数或频率响应函数来获得系统模型。
频域方法适用于具有周期性输入和输出信号的系统。
三、时域方法时域方法是一种将系统响应与时间域特性相关联的模型鉴别方法。
它通常基于实际采集到的离散时间数据,通过插值、拟合等技术来获得离散时间系统的模型。
时域方法可以采用多项式插值、曲线拟合等数学工具,通过建立系统差分方程或状态空间模型来进行模型鉴别。
时域方法适用于实际工程中获得的离散时间数据。
四、系统辨识方法系统辨识方法是一种通过试验数据来识别系统动态特性的模型鉴别方法。
它可以通过对系统施加特定的输入信号,观测系统输出响应来获得系统模型。
系统辨识方法可以分为参数辨识和非参数辨识两种方法。
参数辨识方法假设系统具有某种结构,通过最小化残差的平方和来确定模型参数。
非参数辨识方法不对系统结构进行假设,通过直接拟合试验数据来获得系统模型。
五、神经网络方法神经网络方法是一种基于人工神经网络的模型鉴别方法。
它可以通过输入输出数据训练神经网络,从而获得系统的模型。
神经网络方法可以适用于非线性系统的建模和鉴别。
神经网络方法具有较强的自适应能力和非线性拟合能力,但对于网络结构和训练样本的选择具有一定的要求。
《系统辨识》新方法随着科技的不断进步,系统辨识领域也迎来了新的突破和发展。
系统辨识是指通过对系统内部结构和参数进行分析和推断,以获取对系统行为的认识和预测的过程。
它在工程控制、信号处理、机器学习等领域有着广泛的应用。
在过去,系统辨识主要依靠数学建模和理论推导来实现,但是这种方法往往需要大量的先验知识和较为复杂的计算过程。
如今,随着人工智能、深度学习等技术的发展,一些新的方法开始被引入到系统辨识领域,为系统辨识带来了新的可能性和机遇。
一种新的方法是基于深度学习的系统辨识。
深度学习是一种基于大数据和多层神经网络的机器学习方法,它可以通过学习大量的数据来获取系统的内在模式和规律。
在系统辨识中,深度学习可以应用于对系统状态的预测、参数的估计以及对系统模型的推断。
相比于传统的数学建模方法,基于深度学习的系统辨识在处理非线性系统和高维数据时更加灵活和高效。
它可以直接从数据中学习系统的内在特征,无需假设系统的具体数学结构,从而能够更准确地对系统进行辨识和预测。
另一种新的方法是基于强化学习的系统辨识。
强化学习是一种通过智能体和环境的交互来学习最优行为策略的机器学习方法,它可以应用于系统的参数优化和控制器设计。
在系统辨识中,强化学习可以通过持续的试错和调整来逐步优化系统的辨识性能。
通过与环境的交互和反馈,强化学习可以逐步改进系统辨识的准确性和稳定性。
相比于传统的批量学习方法,基于强化学习的系统辨识可以更好地适应系统的变化和非线性特性。
除了深度学习和强化学习,还有一些其他新的方法也开始被引入到系统辨识领域。
基于图神经网络的系统辨识可以通过对系统的结构和拓扑进行学习和推断,从而实现对复杂系统的辨识和模型推断。
而基于元学习的系统辨识则可以通过对辨识任务的学习和泛化来提升系统辨识的鲁棒性和适应性。
这些新的方法为系统辨识带来了更加丰富和多样的可能性,为工程实践和科学研究提供了新的思路和工具。
新方法也面临着一些挑战和问题。
新方法往往对大量的数据和计算资源有着较高的要求,这对于一些实时性要求较高的系统辨识任务来说可能会存在一定的局限性。
![智能控制(第2版)[刘金琨]chap6](https://uimg.taocdn.com/5fd54893bceb19e8b8f6ba1c.webp)
人工神经网络系统辨识综述摘要:当今社会,系统辨识技术的发展逐渐成熟,人工神经网络的系统辨识方法的应用也越来越多,遍及各个领域。
首先对神经网络系统辨识方法与经典辨识法进行对比,显示出其优越性,然后再通过对改进后的算法具体加以说明,最后展望了神经网络系统辨识法的发展方向。
关键词:神经网络;系统辨识;系统建模0引言随着社会的进步,越来越多的实际系统变成了具有不确定性的复杂系统,经典的系统辨识方法在这些系统中应用,体现出以下的不足:(1)在某些动态系统中,系统的输入常常无法保证,但是最小二乘法的系统辨识法一般要求输入信号已知,且变化较丰富。
(2)在线性系统中,传统的系统辨识方法比在非线性系统辨识效果要好。
(3)不能同时确定系统的结构与参数和往往得不到全局最优解,是传统辨识方法普遍存在的两个缺点。
随着科技的继续发展,基于神经网络的辨识与传统的辨识方法相比较具有以下几个特点:第一,可以省去系统机构建模这一步,不需要建立实际系统的辨识格式;其次,辨识的收敛速度仅依赖于与神经网络本身及其所采用的学习算法,所以可以对本质非线性系统进行辨识;最后可以通过调节神经网络连接权值达到让网络输出逼近系统输出的目的;作为实际系统的辨识模型,神经网络还可用于在线控制。
1神经网络系统辨识法1.1神经网络人工神经网络迅速发展于20世纪末,并广泛地应用于各个领域,尤其是在模式识别、信号处理、工程、专家系统、优化组合、机器人控制等方面。
随着神经网络理论本身以及相关理论和相关技术的不断发展,神经网络的应用定将更加深入。
神经网络,包括前向网络和递归动态网络,将确定某一非线性映射的问题转化为求解优化问题,有一种改进的系统辨识方法就是通过调整网络的权值矩阵来实现这一优化过程。
1.2辨识原理选择一种适合的神经网络模型来逼近实际系统是神经网络用于系统辨识的实质。
其辨识有模型、数据和误差准则三大要素。
系统辨识实际上是一个最优化问题,由辨识的目的与辨识算法的复杂性等因素决定其优化准则。
基于神经网络的机电传动系统参数辨识与自适应控制研究机电传动系统是现代工程中重要的组成部分,其参数的辨识与自适应控制在系统优化与控制策略设计中具有重要意义。
本研究基于神经网络的方法,旨在对机电传动系统的参数进行辨识,并应用自适应控制策略实现系统性能的优化。
一、神经网络在机电传动系统参数辨识中的应用神经网络具有非线性映射和逼近能力强的特点,能够有效地对复杂系统进行建模和辨识。
在机电传动系统参数辨识中,神经网络可以用于识别系统的传递函数、时滞、非线性参数等。
1.1 神经网络的结构与训练神经网络由输入层、隐藏层和输出层组成,通过调整连接权值和偏置来拟合系统的输入输出关系。
传统的训练方法包括误差反向传播算法和逐步逼近算法。
而近年来,基于深度学习的方法,如卷积神经网络和循环神经网络,在参数辨识任务中也取得了较好的效果。
1.2 参数辨识算法常用的参数辨识算法包括最小二乘法、极大似然估计法和粒子群优化算法等。
这些算法可以用于确定神经网络的连接权值和偏置,从而实现对机电传动系统参数的准确辨识。
二、基于神经网络的机电传动系统自适应控制研究机电传动系统自适应控制是指根据实时反馈信息,自动地调整控制策略以实现对系统性能的优化。
神经网络的非线性映射能力使其成为机电传动系统自适应控制的理想工具。
2.1 神经网络控制器设计基于神经网络的自适应控制器可以根据实时反馈信号对系统进行辨识和建模,从而实现对控制策略的自适应调整。
控制器的设计主要包括神经网络结构的选择、损失函数的定义以及参数更新策略的确定。
2.2 自适应控制策略自适应控制策略包括模型参考自适应控制、输出反馈自适应控制和直接自适应控制等。
这些策略可根据实际情况和系统需求进行选择,通过调整神经网络控制器的参数,实现对机电传动系统的自适应调节。
三、机电传动系统参数辨识与自适应控制应用实例为验证基于神经网络的机电传动系统参数辨识与自适应控制方法的有效性,我们给出一个应用实例。
系统辨识的常用方法系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型,是现代控制理论中的一个分支。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
传统的系统辨识方法(1)脉冲响应脉冲响应一般是指系统在输入为单位冲激函数时的输出(响应)。
对于连续时间系统来说,冲激响应一般用函数h(t)来表示.对于无随机噪声的确定性线性系统,当输入信号为一脉冲函数δ(t)时,系统的输出响应 h(t)称为脉冲响应函数。
辨识脉冲响应函数的方法分为直接法、相关法和间接法。
①直接法:将波形较理想的脉冲信号输入系统,按时域的响应方式记录下系统的输出响应,可以是响应曲线或离散值。
②相关法:由著名的维纳—霍夫方程得知:如果输入信号u(t)的自相关函数R(t)是一个脉冲函数kδ(t), 则脉冲响应函数在忽略一个常数因子意义下等于输入输出的互相关函数,即 h(t)=(1/k)Ruy(t)。
实际使用相关法辨识系统的脉冲响应时,常用伪随机信号作为输入信号,由相关仪或数字计算机可获得输入输出的互相关函数Ruy(t),因为伪随机信号的自相关函数 R(t)近似为一个脉冲函数,于是h(t)=(1/k)Ruy(t).这是比较通用的方法。
也可以输入一个带宽足够宽的近似白噪声信号,得到h (t)的近似表示。
③间接法:可以利用功率谱分析方法,先估计出频率响应函数H(ω),然后利用傅里叶逆变换将它变换到时域上,于是便得到脉冲响应h(t)。
(2)最小二乘法最小二乘法(LS)是一种经典的数据处理方法, 但由于最小二乘估计是非一致的、有偏差的, 因而为了克服它的不足, 形成了一些以最小二乘法为基础的辨识方法:广义最小二乘法(GLS)、辅助变量法(IVA)和增广矩阵法(EM),以及将一般的最小二乘法与其它方法相结合的方法,有相关分析——-最小二乘两步法(COR —LS)和随机逼近算法.(3)极大似然法极大似然法(ML)对特殊的噪声模型有很好的性能,具有很好的理论保证;但计算耗费大, 可能得到的是损失函数的局部极小值。
《系统辨识》新方法系统辨识是指通过对一组输入和输出数据进行分析和处理,推导出系统的数学模型和内部参数的过程。
它是掌握系统的动态行为和性能特性的重要手段,广泛应用于控制工程、通信工程、信号处理、经济管理等领域。
传统的系统辨识方法主要依赖于数学模型的建立和参数估计,但由于现实系统的复杂性和不确定性,传统方法在某些情况下存在局限性。
为解决这些问题,人们不断提出新的系统辨识方法。
本文将介绍几种新方法。
一种新方法是基于深度学习的系统辨识。
深度学习是人工智能领域的一个重要分支,其核心是通过构建具有多层非线性特征表达的神经网络模型来解决复杂问题。
在系统辨识中,基于深度学习的方法通过神经网络学习系统的输入和输出之间的非线性映射关系,从而推导出系统的数学模型和内部参数。
与传统方法相比,基于深度学习的系统辨识方法具有更好的适应性和泛化能力,可以处理复杂的非线性系统,并对噪声和干扰具有较强的鲁棒性。
另一种新方法是基于数据驱动的系统辨识。
传统的系统辨识方法需要事先对系统进行建模和参数化,然后通过对系统的输入和输出数据进行拟合和优化,来估计模型的参数。
而基于数据驱动的系统辨识方法不需要对系统进行建模,而是直接通过对系统的输入和输出数据进行分析和处理,推导出系统的数学模型和内部参数。
这种方法的优点是简单易行、快速高效,适用于对系统进行快速辨识和性能分析。
随着科学技术的进步和人们对系统辨识需求的不断增加,新的系统辨识方法不断涌现。
这些新方法通过借鉴深度学习、数据驱动和模型无关的思想和技术,提供了更加灵活、高效和适应性强的系统辨识手段,为实际应用和理论研究提供了新的思路和方法。
随着研究的深入和实践的推进,相信这些新方法将在未来得到广泛的应用和推广。
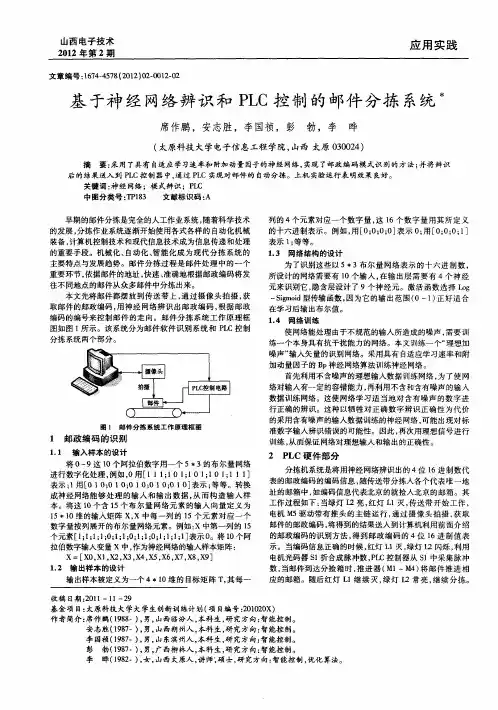
122自动化控制Automatic Control电子技术与软件工程Electronic Technology & Software Engineering1 概述过程控制常常遇到大惯性与纯滞后、多变量与耦合且对象模型时变不确定系统,控制系统结构和参数需要依靠经验和现场调试来确定。
PID 控制使用可靠、参数整定方便,成为过程控制常用的控制规律。
PID 控制三个控制参数其整定是控制系统设计的核心,往往参数整定完成后,整定好参数并不具有自适应能力,因生产环境发生改变,参数又需要重新整定。
利用神经网络多输入多输出以适应多变量与耦合、神经网络模型辨识以适应对象模型时变不确定性监测,使得控制具有良好在线自学习和自适应能力,可以很好发挥PID 比例、积分、微分控制优势。
2 系统设计2.1 总体设计设被控对象为:y(k)=g s [y(k-1),y(k-2),…,y(k-n),u(k-1),u(k-2),…u(k-m)]n>m (1)式(1)中被控对象的非线性特性g s (•)未知,需要神经网络辨基于神经网络系统辨识PID 控制的设计与仿真李建新(广州工商学院工学院 广东省广州市 528138)识器在线辨识以确定被控系统的模型。
PID 控制要取得较好的控制效果,关键在于调整好比例、积分和微分三种控制作用的关系。
在常规PID 控制器中,这种关系只能是简单的线性组合,因此难以适应复杂系统或复杂环境下的控制性能要求。
摘 要:本文为了实现生产过程有效控制,将神经网络、模型辨识和PID 控制技术结合,研究神经网络及系统辨识PID 控制。
该控制利用BP 神经网络学习技术实现PID 参数在线调整,同时采用BP 神经网络对被控对象在线辨识。
所设计的算法通过MATLEB 进行大量数据仿真,结果表明该控制实现了传统的PID控制算法无法适应的要求和对所开发的目标机良好移植性。
关键词:PID 控制;BP 神经网络;模型辨识;参数整定;权值调整图1:基于神经网络系统辨识PID 控制系统结构提高分类器的分类速度,达到了优化的目的。
基于神经网络的非线性系统辨识随着人工智能技术的不断发展,神经网络技术成为人工智能领域中一个重要的研究方向。
神经网络具有自主学习、自适应和非线性等特点,因此在实际应用中有很大潜力。
本文将介绍神经网络在非线性系统辨识中的应用。
一、什么是非线性系统辨识?非线性系统辨识是指对一些非线性系统进行建模与识别,通过参数估计找到最佳的系统模型以进行预测分析和控制。
在许多实际应用中,非线性系统是比较常见的,因此非线性系统辨识技术的研究和应用具有重要的意义。
二、神经网络在非线性系统辨识中的应用神经网络在非线性系统辨识中具有很好的应用效果。
其主要原因是神经网络具有强大的非线性建模和逼近能力。
常用的神经网络模型包括前馈神经网络、递归神经网络和卷积神经网络等。
下面主要介绍前馈神经网络在非线性系统辨识中的应用。
1. 神经网络模型建立前馈神经网络由输入层、隐含层和输出层组成。
在非线性系统辨识中,输入层由外部输入量组成,隐含层用于提取输入量之间的非线性关系,输出层则用于输出系统的状态变量或输出变量。
模型建立的关键是隐含层神经元的个数和激活函数的选取。
2. 系统建模在非线性系统的建模过程中,需要将输出变量与输入变量之间的非线性关系进行建立。
可以使用最小二乘法、最小均方误差法等方法,对神经网络进行训练和学习,在一定的误差范围内拟合系统模型。
此外,也可以使用遗传算法、粒子群算法等优化算法来寻找最优的神经网络参数。
3. 系统预测和控制在系统建模和参数估计后,神经网络可以用于非线性系统的预测和控制。
在预测过程中,将系统的状态量输入前馈神经网络中,通过输出层的计算得到系统的输出量。
在控制过程中,将前馈神经网络与控制器相结合,在控制对象输出量和期望值不同时,自动调节控制器参数的值来实现系统的控制。
三、神经网络在非线性系统辨识中的优势和挑战与传统的线性系统模型相比,神经网络模型可以更好地描述非线性系统,并且可以用于对于非线性系统的建模和控制。
存储神经网络对动态系统的辨识研究绪论人工神经网络用于非线性动力学系统的辨识,已经有人做了大量的研究,提出的方案主要集中在前馈网络上,但前溃网络本身没有内部存储单元,网络的输出仅仅是当前输入的函数,在许多情况下,要被模拟的物理系统的输出是过去输入和输出的函数,如果系统的阶已知,可以利用“外部抽头延迟线”实现,但是如果系统的阶或延迟不知道,这时辨识问题就变得比较复杂。
为此,需要一种简单易学习的递归神经网络结构作为“阶未知的系统”的辨识模型。
在这篇文章里,我把存储神经网络这类递归网络作为非线性动态系统辨识的通用模型。
存储神经网络是通过给前馈网络增加可训练的临时神经单元而构成的。
这类网络的主要引人之处是,它们有可训练的内部存储神经单元,不需要对过去的输入和输出进行反馈,能直接模拟动态系统。
这样,在辨识和控制应用中,该递归网络能够直接将系统的动力学信息包含在网络结构中,而不用假定系统的阶或延迟就能学习动力学系统。
二、网络结构存储神经网络(MNN)的结构如图1图1 存储神经网络的结构Fig .1.Architecture of a Memory Neuron Network .Network neuron are shown as big open circles and memory neurons are shown as small shaded circles. Every network neuron, except those in the output layer , has one corresponding memory neuron . The expanded box shows the actual connections between a network neuron and a memory neuron .如果除开与每一个网络神经元(在图1中用大的圆圈表示)联系的存储神经元(在图1中用小的圆圈表示),网络的结构就退化成了一个前馈的人工神经网络。