西门子运动控制及驱动产品应用实例
- 格式:pdf
- 大小:3.41 MB
- 文档页数:48

获取路径:运控原地->学习资料1 概述IS620F是苏州汇川公司自主研发的一款搭载profinet总线的新型伺服,它是汇川和西门子合作的产物。
支持prifidrive,并支持AC1、AC3、AC4三个应用类。
本文以 S7-1200连接IS620F 为示例,详细介绍了使用TIA Portal 软件完成项目的配置组态、轴的配置以及轴工艺对象的功能测试。
2 项目准备2.1实例的项目总览通过博途软件组态 S7-1200 T和 IS620F 驱动一起实现运动控制,任务如下:∙安装 IS620F 的GSD∙组态 S7-1200 和IS620F 的通信∙编写程序设备网络结构如图 2-1 所示:图 2-1 网络拓扑结构图2.2 使用的软硬件项目中使用的硬件如表 2-2 所示。
项目中使用的软件如表 2-3 所示。
表 2-3 使用的软件伺服驱动器准备1) 伺服电机为23位绝对值编码器电机,使用面板确认H00-00为14101, 2) H02-00=11(PN 总线控制)默认为11.3)H0201=0(增量位置模式)或H0201=1(绝对值位置线性模式). 4)驱动器PN 站名设置H0E21设置为1;H0E21(PN 站名)设置为1代表is620f1,设置为2代表is620f2, 多个IS620可以做区别;C o p y r i g h t S i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d或者通过注意:设置IP地址时, IS620F不要连接PLCIS620F 在线后点击“设置工程名字->配置网络”,设置 IS620F 的 IP 地址及设备名称:注意:设置的设备名称一定要与 PLC 项目中配置的相同。
PN站名1代表is620f13 项目配置3.1 TIA 博途下项目配置3.1.1 添加 S7-1200 CPU 到项目中添加 S7-1200 CPU 到项目中操作步骤如表 3-1 所示。
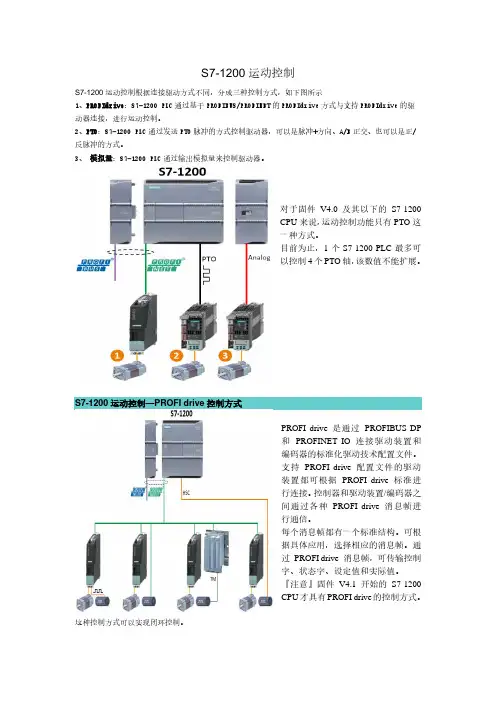
S7-1200运动控制S7-1200运动控制根据连接驱动方式不同,分成三种控制方式,如下图所示1、PROFIdrive:S7-1200 PLC通过基于PROFIBUS/PROFINET的PROFIdrive方式与支持PROFIdrive的驱动器连接,进行运动控制。
2、PTO:S7-1200 PLC通过发送PTO脉冲的方式控制驱动器,可以是脉冲+方向、A/B正交、也可以是正/反脉冲的方式。
3、模拟量:S7-1200 PLC通过输出模拟量来控制驱动器。
对于固件V4.0及其以下的S7-1200CPU来说,运动控制功能只有PTO这一种方式。
目前为止,1个S7-1200 PLC最多可以控制4个PTO轴,该数值不能扩展。
S7-1200 运动控制—PROFI drive控制方式PROFI drive 是通过PROFIBUS DP和PROFINET IO 连接驱动装置和编码器的标准化驱动技术配置文件。
支持PROFI drive 配置文件的驱动装置都可根据PROFI drive 标准进行连接。
控制器和驱动装置/编码器之间通过各种PROFI drive 消息帧进行通信。
每个消息帧都有一个标准结构。
可根据具体应用,选择相应的消息帧。
通过PROFI drive 消息帧,可传输控制字、状态字、设定值和实际值。
『注意』固件V4.1开始的S7-1200CPU才具有PROFI drive的控制方式。
这种控制方式可以实现闭环控制。
S7-1200 运动控制--PTO控制方式PTO的控制方式是目前为止所有版本的S7-1200 CPU都有的控制方式,该控制方式由CPU向轴驱动器发送高速脉冲信号(以及方向信号)来控制轴的运行。
这种控制方式是开环控制。
S7-1200 运动控制--模拟量控制方式固件V4.1开始的S7-1200 PLC的另外一种运动控制方式是模拟量控制方式。
以CPU1215C为例,本机集成了2个AO点,如果用户只需要1或2轴的控制,则不需要扩展模拟量模块。
SIMATICSTEP 7TIA Portal V16中S7-1200 Motion Control V6.0升级为V7.0功能手册Siemens AG Digital Industries Postfach 48 4890026 NÜRNBERG A5E03790555-AGⓅ 10/2019 本公司保留更改的权利Copyright © Siemens AG 2011 - 2019. 保留所有权利法律资讯警告提示系统为了您的人身安全以及避免财产损失,必须注意本手册中的提示。
人身安全的提示用一个警告三角表示,仅与财产损失有关的提示不带警告三角。
警告提示根据危险等级由高到低如下表示。
危险表示如果不采取相应的小心措施,将会导致死亡或者严重的人身伤害。
警告表示如果不采取相应的小心措施,可能导致死亡或者严重的人身伤害。
小心表示如果不采取相应的小心措施,可能导致轻微的人身伤害。
注意表示如果不采取相应的小心措施,可能导致财产损失。
当出现多个危险等级的情况下,每次总是使用最高等级的警告提示。
如果在某个警告提示中带有警告可能导致人身伤害的警告三角,则可能在该警告提示中另外还附带有可能导致财产损失的警告。
合格的专业人员本文件所属的产品/系统只允许由符合各项工作要求的合格人员进行操作。
其操作必须遵照各自附带的文件说明,特别是其中的安全及警告提示。
由于具备相关培训及经验,合格人员可以察觉本产品/系统的风险,并避免可能的危险。
按规定使用 Siemens 产品请注意下列说明:警告Siemens 产品只允许用于目录和相关技术文件中规定的使用情况。
如果要使用其他公司的产品和组件,必须得到 Siemens 推荐和允许。
正确的运输、储存、组装、装配、安装、调试、操作和维护是产品安全、正常运行的前提。
必须保证允许的环境条件。
必须注意相关文件中的提示。
商标所有带有标记符号 ® 的都是 Siemens AG 的注册商标。
生产机械制造行业的范例- SIMOTIONSIMOTION是一个全新的西门子运动控制系统,它是世界上第一款针对生产机械而设计的控制系统,将运动控制,逻辑控制及工艺控制功能集成于一身,为生产机械提供了完整的解决方案。
机械运动越来越复杂,对速度及精度的要求也越来越高。
SIMOTION面向的行业主要是包装机械,橡塑机械,锻压机械,纺织机械,以及其他生产机械领域,正是针对复杂运动控制而推出的全新运动控制系统。
SIMOTION运动控制系统:∙由一个系统来完成所有的运动控制任务∙适用于具有许多运动部件的机器SIMOTION系统具有三个组成部分∙工程开发系统工程开发系统可以实现由一个系统解决所有运动控制、逻辑及工艺控制的问题,并且它还能够提供所有必要的工具,从编程到参数设定,从测试调试到故障诊断。
∙实时软件模块这些模块提供了众多的运动控制及工艺控制功能。
针对某一特定的机器所需的功能,灵活地选择相关的模块。
∙硬件平台硬件平台是SIMOTION运动控制系统的基础。
使由工程开发系统所开发的且使用了实时软件模块的应用程序可以运行在不同的硬件平台上,用户可以选择最适合自己机器的硬件平台。
SIMOTION的不同之处在于,可按任务层次划分的系统,具有灵活的功能,且使用同一种工程开发工具。
SIMOTION 运动控制系统可连接三种硬件平台,即:∙SIMOTION D-集成在驱动器中的紧凑型系统。
SIMOTION D的功能是集成在新的SINAMICS S120多轴驱动系统的控制模板上。
使之成为一个极其紧凑的拥有控制器及驱动器的系统。
将运动控制与驱动器功能集成在一起,使得系统具有极快的响应速度。
o典型应用领域根据其紧凑的设计,以及集成于驱动器上这一特点,SIMOTION D特别适用于:▪小型机械▪分布式自动化结构,例如拥有多轴的机器▪模块化设计的机器,也可以与SIMOTION P或SIMOTION C配合使用▪实时性要求极高的多轴耦合应用∙SIMOTION C -模块化与灵活性SIMOTION C230-2控制器是装配在S7-300机壳中。

基于西门子840Dsl系统的四轴同步运动控制实现发布时间:2022-09-13T02:07:58.492Z 来源:《科学与技术》2022年第5月9期作者:张锦成杨万叶[导读] 在西门子840Dsl系统实现四轴同步运动控制的基础上,折边机滑块部件四轴曲柄连杆的位置-速度同步运动控制主要通过多轴龙门控制方案实现张锦成杨万叶广西玉柴机器股份有限公司广西玉林市 537000摘要:在西门子840Dsl系统实现四轴同步运动控制的基础上,折边机滑块部件四轴曲柄连杆的位置-速度同步运动控制主要通过多轴龙门控制方案实现。
本文结合西门子840Dsl系统的应用开发,对四轴龙门运动控制的实现进行了研究。
关键词:西门子840Dsl系统;四轴同步运动;控制当前,伺服同步控制技术是折边机和折弯机滑块控制领域的一个发展方向。
采用伺服电机通过减速器直接驱动滑块,与传统液压控制相比,具有更高的响应速度及控制精度,降低了传统液压系统的复杂性、能耗、噪声。
此外,由于常规电子齿轮运动控制的控制精度较低且难以实现,因此研究基于西门子840Dsl系统的四轴同步运动控制意义重大。
一、西门子840Dsl数控系统西门子840Dsl数控系统,采用一种开放式设计结构,不仅双乳应用于数控机床,也能应用于运动控制领域,通过系统本身强大的工业通讯网络,可设计成开环或闭,实现柔性生产。
840Dsl系统分成三部分: 1、HMI,人机交互。
主要由人机单元PCU、机床控制面板MCP,以及键盘鼠标、选配的触摸屏等组成,实现加工与仿真、数据管理、上位机通讯等。
2、控制、通讯系统。
主要有数控单元NCU、可编程控制器PLC,以及外围通讯模块、输入输出模块等,实现插补运算、运动控制、数字量模拟量控制等。
3、S120驱动系统。
主要由S120驱动系统、1FK系列伺服电机,具有节能、高动态、稳定可靠的进行轴向运动、插补等优点,另外,S120驱动系统可单独与其他西门子工业自动化产品组合,作为运动控制系统。
S7-1500T 连接V90 PN 实现运动控制(Portal V15)【项目总结版】目录1概述 (3)2在博途软件中安装V90 HSP文件 (4)3硬件组态 (7)4配置轴工艺对象 (11)5 V90 PN的在线测试和优化 (13)6轴工艺对象功能的测试 (18)7 V90 PN在博途中调试的其他相关介绍 (20)1概述S7-1500T是西门子新推出的一款运动控制CPU,支持轴的控制定位和移动,是 CPU S7-1500 和CPU S7-1500SP 的重要组成部分。
S7-1500T CPU 具备运动增强型功能。
运动控制功能支持以下工艺对象:·速度轴·定位轴·同步轴·外部编码器·测量输入·输出凸轮·凸轮轨迹·电子凸轮S7-1500T可以连接具有 PROFIdrive功能的驱动装置或带模拟量设定值接口的驱动装置,通过标准运动控制指令实现运动控制功能,通过轴控制面板以及全面的在线和诊断功能可轻松完成驱动装置的调试和优化工作。
本文以S7-1500T连接V90PN为示例,详细介绍了项目的配置及组态、轴的配置、V90 PN 的在线测试及优化以及轴工艺对象的功能测试。
2在博途软件中安装V90 HSP 文件在博途软件中可以通过使用硬件支持包 (HSP)在 TIA Portal 中添加和组态 SINAMICS V90 PN 驱动装置。
图2-1 系统示意图相关的 V90 HSP 可以通过在西门子官网下载在博途软件中安装V90 PN HSP 文件,操作步骤如表2-1所示。
表2-1在博途软件中安装V90 PN HSP 文件操作步骤序号说明1.下载V90 PN HSP 文件并且解压缩到计算机中:S7-1500SIMATICS7-1500 T-CPUor完美结合的驱动系统2.打开博途软件,点击菜单“选项->支持包(P)”:3.点击“从文件系统添加”,在弹出的画面中选择V90 PN的HSP文件后点击”Open”:4.勾选“HSP0185 Sinamics V90 V3.0”,点击“安装”:5.提示需要关闭博途软件,点击“确定”按钮:6.注意,在关闭博途软件之前安装无法继续进行,需要用户手动关闭博途软件:7.当关闭博途软件后,“继续”按钮变成可以点击,点击后继续进行安装:8.安装后点击“重新启动”,完成HSP的安装过程:3硬件组态完成安装HSP文件之后,需要在博途软件中进行PLC的硬件组态、添加V90PN驱动装置和组态报文,操作步骤如表3-1所示。
一、小车往返运动用S7-200实现小车往返的自动控制 ,控制过程为按下启动按钮,小车从左边往右边(右边往左边运动)当运动到右边(左边)碰到右边(左边)的行程开关后小车自动做返回运动,当碰到另一边的行程开关后又做返回运动。
如此的往返运动,直到当按下停车按钮后小车停止运动。
▲电气接线图I/O分配表梯形图程序PLC接线图程序调试及结果分析▲控制平台操作面板当按下SB2即i0.0(鼠标点击i0.0f)接通后,Q0.0接通,小车右行(即指示 灯 Q0.0 亮)。
当小车运行碰到右限位开关SQ2即i0.4(用鼠标点击i0.4f,模拟SQ2被压下)接通,此时小车左行(指示灯Q0.0灭,指示灯Q0.1亮),当运行到左边碰到左限位SQ1即i0.3(鼠标点击i0.3f)接通,此时小车又往右运行(指示灯Q0.1灭,指示灯Q0.0亮)。
如此往返运动下去直到按下SB1即i0.2(鼠标点i0.2f)接通,小车停止运行。
附:二、闪光电路当按下启动按钮后,要求在两秒钟内有一秒亮有一秒灭,如此反复,灯一闪一闪 发光。
I/O分配表梯形图程序PLC接线图程序调试及结果分析把编写好的程序下载到西门子s7-200PLC中进行调试。
观察运行结果和实验要求是否相同。
通过在线控制面板进行调试,当按下在线控制面板上的I0.0f(即 I0.0接通)此时Q0.0有输出,Q0.0所接负载灯就亮,同时启动定时器T37开始计时, 当计时一秒后因T37动作,其常闭触点断开,所以Q0.0无输出,所接负载灯灭。
灯灭的同时启动定时器 T38,T38 计时一秒后,把串联在定时器T37的常闭触点断开,所以T37复位,T37常闭触点恢复常闭。
此时Q0.0 又有输出, 所接负载灯又亮。
这样,输出Q0.0上所接的负载灯以接通一秒,断开一秒频率不停的闪烁,直到按下在线控制面板上的 I0.1f(即I0.1接通),闪光电路不在继续工作。
若想改变灯闪烁的频率只要改变定时器的时间就能够达到改变要求。
s71200控制2个伺服实例(最新版)目录1.概述2.硬件配置3.轴工艺对象的添加与配置4.命令表的添加与编程5.回原点操作6.总结正文1.概述本文将介绍如何使用西门子 S7-1200 PLC 控制两个西门子 V80 伺服电机进行运动控制。
通过本文的学习,您将了解硬件配置、轴工艺对象的添加与配置、命令表的添加与编程以及回原点操作等方面的知识。
2.硬件配置首先,我们需要对硬件进行配置。
这里我们需要一个 S7-1200 PLC 和一个 V80 伺服电机。
此外,我们还需要一个高速脉冲输出信号,用于驱动伺服电机。
3.轴工艺对象的添加与配置接下来,我们需要在 S7-1200 PLC 中添加轴工艺对象。
轴工艺对象是运动控制的基础,它用于定义伺服轴的名称、类型和参数等。
在添加轴工艺对象后,我们还需要配置扩展对象参数,以便更好地控制伺服轴的运动。
4.命令表的添加与编程在轴工艺对象配置完成后,我们需要添加命令表并进行编程。
命令表用于定义伺服轴的运动模式和运动参数,例如速度、加速度等。
在编程过程中,我们需要使用 S7-1200 PLC 的编程语言(如梯形图或结构化文本)来实现命令表的功能。
5.回原点操作在伺服轴运动过程中,有时需要回到原点。
这时,我们可以使用S7-1200 PLC 的回原点功能。
回原点操作可以通过硬件接线或编程实现。
在实现回原点操作时,我们需要注意避免伺服轴的冲击和损坏。
6.总结通过本文的学习,您已经了解了如何使用 S7-1200 PLC 控制两个V80 伺服电机进行运动控制。
在实际应用中,您可能需要根据具体需求调整硬件配置、轴工艺对象参数和命令表编程等内容。
西门子S120驱动器入门教程CU320•驱动器简介与基本概念•硬件安装与接线指导•软件配置与参数设置详解•运动控制功能实现目•维护与保养建议•总结与展望录01驱动器简介与基本概念它提供了广泛的功率范围和模块化设计,可灵活适应不同的机械和控制需求。
S120驱动器采用了先进的控制算法,确保了精确、快速和稳定的运动控制。
西门子S120是一款高性能的驱动器,专为满足现代工业应用而设计。
西门子S120驱动器概述CU320是S120驱动器的控制单元,负责驱动器的控制和通信任务。
它具有强大的处理能力和丰富的接口,可连接多种编码器和传感器。
CU320还支持多种控制模式,包括速度控制、位置控制和力矩控制等。
CU320控制单元特点西门子S120驱动器广泛应用于机械制造、印刷、包装、纺织等领域。
其主要优势在于高精度控制、快速响应、高可靠性和易于维护等方面。
此外,S120驱动器还支持多种现场总线协议,方便与上位机或PLC进行通信。
应用领域及优势分析驱动器控制单元编码器传感器相关术语解释一种电力电子设备,用于控制电机的速度、位置和力矩等参数。
一种测量装置,用于检测电机的位置和速度等参数。
驱动器的核心部件,负责处理控制信号和通信任务。
一种检测装置,用于检测电机的电流、电压、温度等状态参数。
02硬件安装与接线指导西门子S120驱动器CU320外观紧凑,结构坚固,适应各种工业环境。
接口丰富,包括电源接口、编码器接口、通讯接口等,满足各种连接需求。
驱动器面板上配有LED显示屏和按键,方便用户进行参数设置和故障诊断。
驱动器外观及接口介绍电源连接注意事项确保电源电压与驱动器额定电压相匹配,避免过压或欠压对驱动器造成损坏。
电源线应使用符合规格的电缆,并确保接线牢固、可靠。
对于大功率驱动器,应考虑电源线的线径和长度,以减小压降和温升。
编码器电缆连接方法01编码器电缆应使用屏蔽电缆,以减小电磁干扰对编码器信号的影响。
02电缆长度不宜过长,一般不超过50米,以减小信号衰减和干扰。
SINAMICS S120 内置式变频器高性能复杂应用传动 概述 SINAMICS S120 – 说明 SINAMICS S120 – 亮点简介 SINAMICS S120 – 技术数据 SINAMICS S120 – 典型应用SINAMICS S120 – 说明SINAMICS S120 SINAMICS S120 模块化运动控制驱动器适用于机械与系统工程中的高性能驱动应用。
西门子的 高性能驱动系统为您提供了广泛而相互协调的组件与功能, 可作为一个全面的运动控制驱动系统 使用。
这些运动控制驱动器包括高性能单轴驱动器和多轴共直流母线驱动器, 具有矢量控制或伺 服控制,可实现量身定制的高性能驱动解决方案。
SINAMICS S120 运动控制驱动器是一种高性 能驱动器,使用灵活,可提高生产效率。
除具有创新的系统结构和数字通信功能外,这些运动控 制驱动器还提供了创新的工具,并且接线简便,从而可进行高效组态与快速调试。
SINAMICS S120 功率范围为 0.12 - 4500 kW,具有各种结构形式和冷却方式。
To the top of the pageSINAMICS S120 – 亮点简介 伺服驱动器是模块化系统和机器设计的理想基础 创新的系统体系结构和数字通信功能 具有多种控制模式和与驱动器特定相关的工艺功能 内置有安全功能 通过 SIZER 和 STARTER 进行高效组态和快速调试 自动组态和自动优化 通过全集成自动化 (TIA) 实现集成解决方案 实现 SINAMICS 直至自动化级的集成To the top of the pageSINAMICS S120 – 技术数据额定值取决于运动控制驱动器的设计与类型额定值取决于运动控制驱动器的设计与类型 电压和功率范围: 控制原理: 0.12 - 4500 kW230 V、380 - 480 V 和 500 - 690 V (50/60 Hz) V/f 开环控制 矢量控制,带/不带编码器 伺服控制,带/不带编码器 To the top of the pageSINAMICS S120 – 典型应用不管是连续的输送线还是同步及高动态过程, 西门子的高性能驱动产品在众多工业应用中均能发 挥作用。