balluff接近限位开关
- 格式:pdf
- 大小:1.93 MB
- 文档页数:28
德国BALLUFF巴鲁夫位移传感器工作原理巴鲁夫位移传感器具有无滑动触点,工作时不受灰尘等非金属因素的影响,并且低功耗,长寿命,可使用在各种恶劣条件下。
位移传感器主要应用在自动化装备生产线对模拟量的智能控制。
位移是和物体的位置在运动过程中的移动有关的量,位移的测量方式所涉及的范围是相当广泛的。
小位移通常用应变式、电感式、差动变压器式、涡流式、霍尔传感器来检测,大的位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。
其中光栅传感器因具有易实现数字化、精度高(目前分辨率最高的可达到纳米级)、抗干扰能力强、没有人为读数误差、安装方便、使用可靠等优点,在机床加工、检测仪表等行业中得到日益广泛的应用。
巴鲁夫位移传感器的功能在于把直线机械位移量转换成电信号。
为了达到这一效果,通常将可变电阻滑轨定置在传感器的固定部位,通过滑片在滑轨上的位移来测量不同的阻值。
传感器滑轨连接稳态直流电压,允许流过微安培的小电流,滑片和始端之间的电压,与滑片移动的长度成正比。
将传感器用作分压器可最大限度降低对滑轨总阻值精确性的要求,因为由温度变化引起的阻值变化不会影响到测量结果。
德国BALLUFF巴鲁夫位移传感器工作原理产品优势:高分辨率、高重复性和高线性抗震动、抗干扰场探测液压驱动装置 (如风力发电设备) 的活塞位置监测注塑机或加工中心内的线性运动监控配料及混合单元内的料位德国BALLUFF巴鲁夫位移传感器部分产品型号:BTL0E1E BTL5-S171B-M0200-P-S32BTL0E30 BTL5-S172B-M1000-P-S32BTL0EM1 BTL5-S177B-M0225-P-KA05BTL0EWY BTL5-S112B-M0500-P-S32BTL0H8Y BTL5-S112B-M0300-P-S32BTL0HA1 BTL5-S112B-M1125-P-S32BTL0HA3 BTL5-S112B-M1535-P-S32BTL0HA4 BTL5-S112B-M1625-P-S32BTL0J0Y BTL5-S162-M4500-P-SA303-S32BTL0JR6 BTL5-S186-M2150-P-S32BTL0K2Z BTL5-S113B-M0250-P-S32BTL0L78 BTL5-S101B-M0300-P-S32BTL0LWK BTL5-S171B-M1500-P-SA244-S32BTL0M5C BTL5-S171B-M2000-P-S32德国BALLUFF巴鲁夫位移传感器工作原理BTL0N5E BTL5-S163-M2250-P-S32BTL0NPM BTL5-S113B-M2300-P-S32BTL0NRC BTL5-S101-M0600-P-SA243-S32BTL0P0L BTL5-S171B-M0900-P-KA15BTL0P10 BTL5-S111B-M0500-P-KA05SET00AA BTL5-S114-M0600-P-S32/KRUPP KAUTEX BTL00KJ BTL5-T110-M0450-P-S103BTL00NZ BTL5-T110-M0900-P-S103BTL00TL BTL5-T110-M0050-P-S103BTL00ZZ BTL5-T110-M0750-P-S103BTL0100 BTL5-T110-M1750-P-S103BTL0100 BTL5-T110-M1750-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL0137 BTL5-T110-M1000-P-S103BTL01N4 BTL5-T110-M0550-P-S103BTL01N8 BTL5-T110-M0175-P-S103BTL01RU BTL5-T110-M0400-P-S103BTL0284 BTL5-T110-M0100-P-S103BTL028J BTL5-T120-M1000-P-S103BTL02C4 BTL5-T110-M0130-P-S103BTL03A3 BTL5-T110-M0350-P-S103BTL03H0 BTL5-T110-M0150-P-S103BTL03H2 BTL5-T110-M0200-P-S103BTL03H3 BTL5-T110-M0225-P-S103BTL03H5 BTL5-T110-M0250-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL03H9 BTL5-T110-M0300-P-S103BTL03HA BTL5-T110-M0300-P-SA268-S103BTL03HF BTL5-T110-M0400-P-SA160-S103BTL03HJ BTL5-T110-M0500-P-S103BTL03HM BTL5-T110-M0600-P-S103BTL03HP BTL5-T110-M0650-P-S103BTL03HT BTL5-T110-M0700-P-S103BTL03HW BTL5-T110-M0800-P-S103BTL03HZ BTL5-T110-M1400-P-S103BTL03J0 BTL5-T110-M1600-P-S103BTL03J1 BTL5-T110-M2000-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL03J1 BTL5-T110-M2000-P-S103BTL03J2 BTL5-T110-M2050-P-S103BTL03J3 BTL5-T110-M2100-P-S103BTL03J4 BTL5-T110-M2150-P-S103BTL03J4 BTL5-T110-M2150-P-S103BTL03J5 BTL5-T110-M2200-P-S103BTL03J7 BTL5-T110-M3100-P-S103BTL03J9 BTL5-T120-M0700-P-S103BTL03JC BTL5-T120-M1750-P-S103BTL03JF BTL5-T120-M2000-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL03JH BTL5-T120-M2250-P-S103BTL08R2 BTL5-T110-M1250-P-S103BTL09AL BTL5-T120-M4250-P-SA303-S103 BTL0JJ6 BTL5-T120-M2100-P-S103BTL0K77 BTL5-T110-M0930-P-S103BTL0K8F BTL5-T110-M4500-P-SA303-S103 BTL0N5C BTL5-T110-M2400-P-S103BTL5-T110-M0500-P-S103 (V2)BTL5-T110-M1800-P-S103 (V2)BTL5-T110-M0250-B-S103 (V2)BTL0469 BTL5-Q5020-M0508-P-S140BTL046K BTL5-Q5021-M0457-P-S140德国BALLUFF巴鲁夫位移传感器工作原理BTL049C BTL5-Q5222-M0203-P-S140BTL049E BTL5-Q5222-M1000-P-S140BTL049H BTL5-Q5231-M0051-P-S140BTL049K BTL5-Q5231-M0407-P-S140BTL04C4 BTL5-Q5621-M0077-P-S140BTL04C9 BTL5-Q5631-M0203-P-S140BTL04EF BTL5-Q5654-M0305-P-S140BTL00Z5 BTL5-D112-M0350-P-S93BTL03AM BTL5-D112-M0050-P-S93BTL03AN BTL5-D112-M0150-P-S93BTL03AP BTL5-D112-M0175-P-S93德国BALLUFF巴鲁夫位移传感器工作原理BTL03AR BTL5-D112-M0200-P-S93BTL03AT BTL5-D112-M0250-P-S93BTL03AU BTL5-D112-M0300-P-S93BTL03AW BTL5-D112-M0400-P-S93BTL03AY BTL5-D112-M0450-P-S93BTL03AZ BTL5-D112-M0600-P-S93BTL03C0 BTL5-D112-M0650-P-S93BTL03C1 BTL5-D112-M0700-P-S93BTL03C2 BTL5-D112-M0850-P-S93BTL03C2 BTL5-D112-M0850-P-S93BTL03C3 BTL5-D112-M1000-P-S93德国BALLUFF巴鲁夫位移传感器工作原理BTL03C4 BTL5-D112-M1200-P-S93BTL03C5 BTL5-D112-M1250-P-S93BTL03C6 BTL5-D112-M1500-P-S93BTL03C6 BTL5-D112-M1500-P-S93BTL03C7 BTL5-D112-M1600-P-S93BTL03C8 BTL5-D112-M1900-P-S93BTL03C9 BTL5-D112-M3250-P-S93BTL03CA BTL5-D114-M0500-P-S93BTL03CC BTL5-D114-M1200-P-S93BTL0CAH BTL5-D112-M1950-P-S93BTL0E91 BTL5-D112-M0500-P-S93BTL0JN1 BTL7-E170-M0075-B-NEX-S32 BTL00MR BTL5-A11-M0300-B-KA05BTL0150 BTL5-A11-M0300-B-S32BTL015U BTL5-A11-M0050-B-S32BTL015Y BTL5-A11-M0100-B-KA05BTL015Z BTL5-A11-M0100-B-S32BTL0160 BTL5-A11-M0120-B-SA225-KA01 BTL0161 BTL5-A11-M0125-B-S32BTL0162 BTL5-A11-M0150-B-S32BTL0163 BTL5-A11-M0175-B-KA05BTL0164 BTL5-A11-M0175-B-S32BTL0166 BTL5-A11-M0200-B-S32BTL0167 BTL5-A11-M0200-B-SA42-KA05 BTL0168 BTL5-A11-M0225-B-S32BTL0169 BTL5-A11-M0250-B-S32BTL016A BTL5-A11-M0275-B-S32BTL016E BTL5-A11-M0290-B-SA225-KA01 BTL016F BTL5-A11-M0300-B-SA56-S32 BTL016L BTL5-A11-M0340-B-SA56-S32 BTL016M BTL5-A11-M0350-B-S32BTL016P BTL5-A11-M0400-B-S32BTL016T BTL5-A11-M0450-B-S32BTL016U BTL5-A11-M0500-B-S32BTL016Z BTL5-A11-M0500-B-SA56-S32 BTL0170 BTL5-A11-M0550-B-S32BTL0171 BTL5-A11-M0580-B-SA56-S32 BTL0172 BTL5-A11-M0600-B-S32BTL0174 BTL5-A11-M0650-B-S32BTL0175 BTL5-A11-M0650-B-SA56-S32BTL0177 BTL5-A11-M0750-B-S32BTL0178 BTL5-A11-M0800-B-S32BTL0179 BTL5-A11-M0800-B-SA56-S32 BTL017A BTL5-A11-M0900-B-S32BTL017C BTL5-A11-M1000-B-S32BTL017E BTL5-A11-M1100-B-S32BTL017H BTL5-A11-M1500-B-S32BTL017K BTL5-A11-M4200-B-S32BTL017L BTL5-A11-M4300-B-S32BTL017M BTL5-A11-M4450-B-S32BTL0313 BTL5-A11-M0030-B-S32BTL0C83 BTL5-A11-M0325-B-S32BTL0F7U BTL5-A11-M2750-B-S32BTL0FNP BTL5-A11-M0400-B-KA05BTL0FNR BTL5-A11-M1800-B-KA05BTL0FNT BTL5-A11-M4000-B-S32BTL0L66 BTL5-A11-M0960-B-SA56-S32 BTL0NM7 BTL5-A11-M1535-B-S32BTL017U BTL5-C10-M0350-B-S32BTL017W BTL5-C17-M0100-B-S32BTL017Y BTL5-C17-M0750-B-KA05BTL017Z BTL5-C17-M0750-B-S32BTL0180 BTL5-C17-M0750-B-SA182-KA05 德国BALLUFF巴鲁夫位移传感器工作原理。
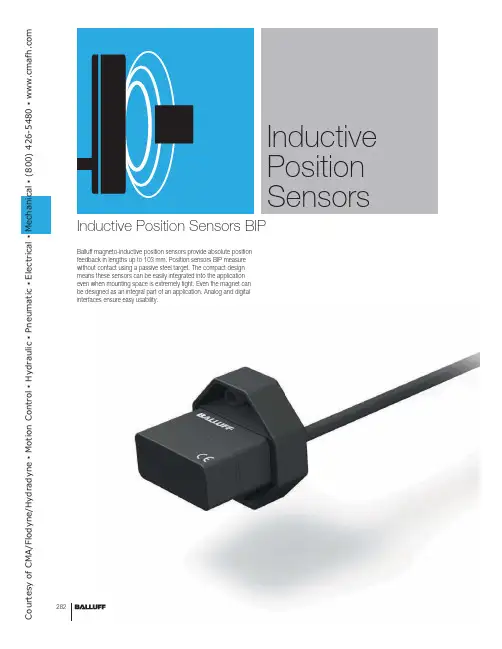
Balluff magneto-inductive position sensors provide absolute position feedback in lengths up to 103 mm. Position sensors BIP measure without contact using a passive steel target. The compact design means these sensors can be easily integrated into the application even when mounting space is extremely tight. Even the magnet can be designed as an integral part of an application. Analog and digital interfaces ensure easy usability.Inductive Position Sensors BIPI nductive PositionSensors282C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o mInductive Position Sensors BIPC ontents Inductive position sensors BIPGeneral data284283C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o mInductive Position Sensors BIPG eneral data Compacthousing■Absolute measuring principle, several measuring ranges, teachable■High repeat accuracy and precision■Optimal linearity and low temperature drift■Optimized housing design for clamping distance monitoring ■Distance-proportional IO-Link output signal ■Standard output 0...10 V , 4...20 mA284For more information, visit us online!C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o mInductive Position Sensors BIPGeneral dataInductivepositionsensorsMagneto-inductivepositionsensors BILInductivepositionsensors BIPGeneral dataBasicInformationandDefi nitionsBAM TG-XE-010The position encoder must have a width of14 mm and cover the sensing surface of thesensor orthogonally to the measuring direction.BAM TG-XE-001285 CourtesyofCMA/Flodyne/HydradyneŀMotionControlŀHydraulicŀPneum)426-548ŀwww.cmafh.comInductive Position Sensors BIPGeneral dataOptimizedeffective length■Absolute measuring principle, severalmeasuring ranges, teachable■High repeat accuracy and precision■Wide working temperature range and lowtemperature drift■Optimized housing design, IP 67 degree ofprotection■Standard output 0...10 V, 4...20 mAOrdering code BIP000C BIP000EPart number BIP ED2-B070-03-S75BIP ED2-B103-03-S75Output signal0...10 V and 4...20 mA0...10 V and 4...20 mALength of measuring range is teachable35...70 mm51.5...103 mmDetection range0...76.5 mm0...105 mmTarget width (EC80)8 mm8 mmTarget distance 1...3 mm 1...3 mmResolution80 μm80 μmRepeat accuracy±80 μm±80 μmLinearity deviation±300 μm±400 μmAmbient temperature–25...+85°C–25...+85°CConnection M8 connector M8 connectorSupply voltage16...30 V16...30 VHousing material PBT PBTLED function indicator yes yesteachable teachablePlease order Metal Target separately.Type designation: BAM TG-XE-001Ordering code: BAM01CPTwo fastening clips incl. screws areincluded in the delivery.286For more information, visit us online! CourtesyofCMA/Flodyne/HydradyneŀMotionControlŀHydraulicŀPneumaticŀElectricalŀMechanicalŀ(8)426-548ŀwww.cmafh.comInductive Position Sensors BIPApplicationInductive position sensors Magneto-inductive positionsensors BIL Inductive position sensors BIP General data BasicInformation and Defi nitionsInductive position sensors detect linear motion and provide a position-dependent output signal.The compact design makes them easy to integrate and monitor assembly and joining processes.■Compact and easy to integrate ■Wear-free■Absolute measuring principle ■Analog output signal or IO-Link287 C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o mI nductive PositionSensors288C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o mBasic Information and Defi nitionsContentsBasic information and defi nitions Defi nitions290289C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o mBasic Information and Defi nitionsD efi nitionsPosition sensors with analog outputWorking range s wEffective distance s eLinear range s INon-linearityMeasuring speedResponse timeSlopeTemperature driftTemperature coeffi cient TCTolerance TPosition sensors with analog output are sensors that generate a con-tinually varying output signal that depends on the distance between its sensing surface and the location of the magnet relative to the sensor.Working range s w is the travel path usable for position detection.Effective distance s e is the point in the middle of the linear range s I and is used as the reference point for other specifi cations.Linear range s I corresponds to the working range where the displace-ment sensor exhibits a defi ned linearity.Non-linearity specifi es the maximum deviation of the characteristic from a straight reference line. This value applies to the linear range.Measurement speed indicates the ability to detect the position of an object moving with linear motion. The direction of movement of the object is assumed to be parallel to its sensing face.Response time is the time a sensor requires to reliably and steadily change the output signal. The specifi ed time, which has been deter-mined at the maximum measuring speed, includes both the electrical response time of the sensor and the time for the mechanical change of the damping state.Slope is a measure of the sensitivity of the sensor with respect to a distance change. This physical relationship can be calculated for posi-tion sensors as follows:Slope S [V/mm] =U out max – U out min s w max – s w minorSlope S [mA/mm] =I out max – I out min s w max – s w min Temperature drift is the shift a point experiences on the actual output curve at different temperatures. Temperature drift is described by the temperature coeffi cient.Temperature coeffi cient TC describes the deviation of the sensor output signal under the effect of a temperature change, and thus represents a quality criterion for the sensor as well.Tolerance T is a variable that defi nes the manufacturing tolerance band of the output curve, thereby determining the maximum sample deviation.290For more information, visit us online!C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o mBasic Information and Defi nitionsDefi nitionsRepeat accuracy RRepeat accuracy R BWNOutput curvesInstallation noticesValues in mmRecommended minimum distances from magnetizable materials or other BIL sensorsBIL AMD0...BIL EMD0.../ BIP ED2...BIL ED0.../ BIP AD.../ BIP CD...Repeat accuracy R is the value of output signal changes underdefi ned conditions, expressed as a percentage of the upper distance. The measurement must be taken in the lower, upper and center area of the linear range. It corresponds to the repeat accuracy R of proximity switches and is determined under the same standardized conditions (EN 60947-5-2).Position sensors with analog output achieve the value R of ≤ 5% defi ned in the standard.Repeat accuracy R BWN describes the precision an analog sensorachieves when moving to a measuring point multiple times. This value, specifi ed based on Balluff Factory Standard (BWN Pr. 44), describes the maximum deviation from this measuring point.It is recommended that the BIL and magnet be installed or attachedto non-magnetizable materials, such as non-ferrous metals, austenitic steels, plastics, etc. This applies to the installation of both the sensor and the magnet.Magnetizable materials may affect the geometry and strength of the effective encoder magnetic fi eld.Magnetic fi elds near the BIL can affect the output signal depending on their location and strength. This also applies to magnets neighboring BIL sensors.An area free of metals should be maintained all the way around the BIP's sensing surface in order to minimize the effects on the measur-ing signal caused by the installation material (see notes in the user's guide).Invalid measurement signals may result if the sensor detects another metal part aside from the magnet.Inductive position sensors Magneto-inductive position sensors BIL Inductive position sensors BIP BasicInformation and Defi nitions Defi nitions291 C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o m。
德国BALLUFF(巴鲁夫)信息来源:广州兰瑟电子科技公司德国BALLUFF(巴鲁夫)分类:BNS完整电子式、机电式行程开关系列、BOS光电开关、BES感应式接近开关、电容开关、BMF磁敏开关,BTL直线位移传感器,RFID识别系统,各种插接件等。
德国BALLUFF(巴鲁夫)型号及描述:巴鲁夫(BALLUFF)电感式接近传感器BES 113-356-SA6-S4巴鲁夫(BALLUFF)电感式接近传感器BES 516-300-S 135-S 4-D 巴鲁夫(BALLUFF)电感式接近传感器BES M08MI-PSC20B-BV03 巴鲁夫(BALLUFF)电感式接近传感器BES113-356-SA6-PU-03 巴鲁夫(BALLUFF)电感式接近传感器BES113-356-SA6-PU-05 巴鲁夫(BALLUFF)电感式接近传感器BES516-329-14-C-03巴鲁夫(BALLUFF)电感式接近传感器BES516-329-14-C-05巴鲁夫(BALLUFF)电感式接近传感器BESM08EC-PSC15B-S49G 巴鲁夫(BALLUFF)电感式接近传感器BESM12I-PSC20B-S04G 巴鲁夫(BALLUFF)电感式接近传感器BESM12I-PS0B-S04G巴鲁夫(BALLUFF)位移传感器BAW G06EE-UAF20B-EP03-K巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP015-GS04巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP03巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP05巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD25F-BP-03巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP002-GS04 巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP015-GS04 巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP03巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP05巴鲁夫(BALLUFF)位移传感器BAW M12MI-UAC20B-S04G巴鲁夫(BALLUFF)位移传感器BAWM08EI-UAD15B-BP002-GS04 巴鲁夫(BALLUFF)电容式接近传感器BCS 010-PSB-1-L-P02巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PS-1-L-S 4巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PSB-1-L-S 4巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PSB-1-L-S4巴鲁夫(BALLUFF)电容式接近传感器BCS G34KN2-NSC24G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS G34KN2-PSC24G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS M30KN2-NSC18G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS M30KN2-PSC18G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS-20GM10-XPA1Y-8B-03巴鲁夫(BALLUFF)微型断路器BOS-18M-PA-1PD-E5-C-S4,巴鲁夫(BALLUFF)微型断路器BCS20MG10-XPA1Y-8B巴鲁夫(BALLUFF)微型断路器BCS20MG10-XPA1Y-8B-03巴鲁夫(BALLUFF)微型断路器BES 516-114-S4-C 10-30V巴鲁夫(BALLUFF)微型断路器BES113-356-SA6-S4巴鲁夫(BALLUFF)微型断路器BES113356SA6-S4巴鲁夫(BALLUFF)微型断路器BES516-300-S135-S4-D巴鲁夫(BALLUFF)微型断路器BES516-347-M0-C-03巴鲁夫(BALLUFF)微型断路器BES517-140-P5-H巴鲁夫(BALLUFF)微型断路器BESM12MI-PSC20B-S04G巴鲁夫(BALLUFF)微型断路器BESM12MI-PS0B-S04G巴鲁夫(BALLUFF)微型断路器BKS-S33M-00?巴鲁夫(BALLUFF)微型断路器BOS15K-S-E1-P-S75巴鲁夫(BALLUFF)微型断路器BRGB3-W AB12EP-P-R-K-SA8-0.3 巴鲁夫(BALLUFF)微型断路器BRGC5-W AP360-0P-G-0-SR巴鲁夫(BALLUFF)微型断路器BTL5-E10-M2000-B-S32巴鲁夫(BALLUFF)微型断路器BTL5-S173-M0206-P-S32巴鲁夫(BALLUFF)微型断路器dks-s20-2-05巴鲁夫(BALLUFF)微型断路器BES516-3005-E4-C-PU-05巴鲁夫(BALLUFF)微型断路器BES113-356-SA31-S4巴鲁夫(BALLUFF)微型断路器BES516-300-S-135-S4-D 36V巴鲁夫(BALLUFF)微型断路器BES516-3021-G-E4-C-PU-02巴鲁夫(BALLUFF)微型断路器BES516-3022-G-E5巴鲁夫(BALLUFF)微型断路器BES516-325-G-S4-C巴鲁夫(BALLUFF)微型断路器BES516-325-S4-C巴鲁夫(BALLUFF)微型断路器BES516-362-S4-CW巴鲁夫(BALLUFF)微型断路器BES516-371-SA10-S4-003巴鲁夫(BALLUFF)传感器控制器BKS-S32M-C-00巴鲁夫(BALLUFF)电感式接近传感器BTL5-S173-M0350-B-S32 巴鲁夫(BALLUFF)电感式接近传感器BTL-P-1012-4R巴鲁夫(BALLUFF)光电开关BOS18M-PS-1XB-E5-C-S4巴鲁夫(BALLUFF)电感式接近传感器BRGB3-W AB12-EP-P-R-K-SA8-03。

用于机床的传感器严酷环境中的高精度反馈巴 鲁 夫机床制造水平的创新与进步,决定性地推动了工业生产过程的技术变革。
自动化技术的进步,又通常源于传感器技术的提升。
机床行业正在不断经历着,并将继续经历一系列技术进步——提高产品性能,灵活性及可靠运行时间。
巴鲁夫,作为数十载服务机床制造业的传感器制造商,将继续致力于以“服务机床行业”为宗旨,推动机床制造业的发展。
用于机床的传感器严酷环境中的高精度反馈电容开关 BCS机床应用的最佳选择圆柱形外壳系列光电传感器应用于机床工业圆柱形外壳机电式单档位/多档位组合行程开关和限位开关带安全开关元件的机电式单档位/多档位组合行程开关和限位开关单档位及多档位机电式/感应式组合行程开关和限位开关作为主令控制设备几乎用于所有自动控制的应用中,尤其用于传输线和机床的定位和限位。
无论您在何处使用,我们的机械结构均能保证安全可靠的开关动作。
它们专为确保在极端严酷的应用环境(诸如振动、冲击、撞击或冷却液润滑液侵蚀)中可靠应用而开发设计,数十年的应用证明了它们的价值。
我们的单档位及多档位组合行程开关和限位开关能够提供符合DIN 43697和DIN 43693标准以及满足特殊应用需求的外壳。
种类齐全的附件能够满足客户的特殊应用条件和结构。
机电式和感应式单档位/多档位组合行程开关和限位开关自动控制的经典之作BNS多档位组合行程开关快速更换顶杆模块的问题解决专家www.balluff.co对刀具最优化的计划和管理是现代生产设备无差错刀具安装,保证停机时间最短的必要因素。
刀具管理的关键组件是刀具识别系统。
所有的刀具信息,诸如ID 识别码,刀具寿命,几何尺寸等,均可保存在粘结在刀具上的记忆芯片中。
数据的载入(和读回)无需接触,因此无磨损。
当将刀具安装到机床上,数据会随即读入机床的存储器中,防止错误的数据写入。
当刀具从机床上卸下时,经过改写的数据会刷新存储芯片。
采用识别系统的另外一个优势是能够最优化管理刀具的寿命。
产品信息通用线性模块 Beta 70Beta通用线性模块灵活 模块化。
紧凑。
通用型线性模块 Beta通用线性模块,带可选齿带或主轴驱动和各种导轨选项应用领域通用线性模块带有可选的齿带传动装置,适用于高加速度和高速度、或主轴传动装置,在高驱动力情况下实现精确定位。
优点 - 为您带来的益处适配驱动电机方法通用且便于整合至现有控制中选配皮带或主轴驱动为您的应用提供最优化的驱动各种导轨选项是满足你应用需求的最佳适配具有成本效益的基本版产品,配备了基本功能用于简单且性价比高的应用紧凑尺寸轮廓干扰性小配有盖带 通用且刀具使用寿命长可通过紧固件或槽螺母固定灵活地集成规格数量: 11最大行程860 .. 7720 mm最大传动力500 .. 18000 N重复精度±0.03 .. 0.08 mm最大速度0.5 .. 8 m/s功能描述滑轨通常采用齿形带或滚珠丝杆主轴驱动,通过(双)轮廓型材导轨精确导向。
盖板在滑轨上移动,盖住传动装置和导向器。
伺服电机通常通过传动轴连接到型材。
1铝型材自承重且牢固2型材导轨最大位置精度和力矩荷载3塑料绝缘包布整个导轨均可防止粗粒土进入4齿带将旋转运动转化为线性运动5滚珠丝杆主轴将旋转运动转化为线性运动4Beta通用线性模块详细功能说明带直角安装式电机的齿带轴此图表明:如何使用发动机锥体、离合器和传动装置,将电机成直角安装在齿带轴上。
齿带传动装置电机皮带联轴器齿轮伺服电机带连接轴的同步齿带轴另一根齿带轴可以使用连接轴驱动。
齿带传动装置连接轴电机皮带联轴器齿轮伺服电机带轴向安装式电机的主轴图片显示了如何用发动机锥体和联轴器将电机轴向安装到主轴上。
主轴中心线电机皮带联轴器伺服电机带直角安装式电机的主轴电机也可用锥齿轮成直角安装在主轴上。
主轴中心线锥齿轮电机皮带联轴器伺服电机Beta通用线性模块带并列式电机的主轴为节省空间,可以用角带传动装置,将电机与主轴并列安装。
主轴中心线齿形带驱动伺服电机Beta通用线性模块产品系列的常规说明工作原理: 选择齿带或滚珠丝杆主轴传动装置传动装置: 可以无故障地调整适配不同供应商的伺服电机。
德国巴鲁夫三种不同接近开关的工作原理1、电感式接近开关工作原理:电感式传感大部分组成:振荡器、开关电路及放大输出电路。
振荡器产变磁场。
当金属目标接近这磁场,并达到感应距离时,在金属目标内产生涡流,从而导致振荡衰减,以至停振。
振荡器振荡及停振的变化被后级放大电路处理并转换成开关触发驱动控制器件,从而达到非接触式之检测測目的2、电容式接近开关的工作原理:电容式接近开关的感应面由两个同轴金属电极构成,很象打开的电容器电极,该两个电极构成一个电容,串接在RC振荡回路内。
电源接通时,RC振荡器不振荡标朝着电容器的电靠近时,电容器的容量增加,振荡器开始振荡。
通过后级路的处理,将振和振荡两种信号转换成开关信号,从而起到了检测有无物体存在的目的。
该传感器能检测金属物体,也能检测非金属物体,对金属物体可以获得大的动作距离,对非金属物体动作距离决定于材料的介电常数,材料的介电常数越大,可获得的动作距离越大。
3、霍尔开关的工作原理:磁式开关是接近开关,它(甚至透过非黑色金属)响应于一个磁场。
作用距离大于电感接近开关。
响应曲线与磁场的方向有关。
当一个目标(yong久磁铁或外部磁场)接近时,线圈铁芯的导磁性(线图的电感量L是由它决定的)变小,线图的电感量也减小,Q 值增加。
激励振荡器振荡,并使振荡电流增加。
当一个磁性目标靠近时,磁式传感器[1]的电流消耗之增加。
1、电感式接近开关工作原理:电感式传感大部分组成:振荡器、开关电路及放大输出电路。
振荡器产变磁场。
当金属目标接近这磁场,并达到感应距离时,在金属目标内产生涡流,从而导致振荡衰减,以至停振。
振荡器振荡及停振的变化被后级放大电路处理并转换成开关触发驱动控制器件,从而达到非接触式之检测測目的2、电容式接近开关的工作原理:电容式接近开关的感应面由两个同轴金属电极构成,很象打开的电容器电极,该两个电极构成一个电容,串接在RC振荡回路内。
电源接通时,RC振荡器不振荡标朝着电容器的电靠近时,电容器的容量增加,振荡器开始振荡。
巴鲁夫接近开关巴鲁夫接近开关(Baruffaldi proximity switch)是一种常用于探测金属对象位置的开关,通常被应用于工业自动化系统中,可以实时检测物体的存在或不存在,从而控制设备的启停。
巴鲁夫接近开关采用感应原理工作,利用交流电源激励发生器产生高频磁场,在传感器的探测范围内,若有金属物体靠近,则磁场发生器的电流会发生变化,从而引起传感器的感应。
传感器会将这个信息转换成电信号,并传回给控制系统。
由于巴鲁夫接近开关不需要接触物体就可以检测出物体的存在,因此它具有无污染、无损坏、长寿命等优点,被广泛应用于工业自动化领域。
工作原理巴鲁夫接近开关主要由感应器和电路板两部分构成,电路板包含发生器、检测电路和输出电路等主要电子元件。
感应器则分为铁芯型、非铁芯型和铁芯-非铁芯混合型三种,其中铁芯型和非铁芯型是最常用的两种型号。
铁芯型巴鲁夫接近开关的感应器中包含一个铁质芯,可提高磁场感应强度,并增强探测距离。
非铁芯型巴鲁夫接近开关则完全不含铁芯,因此可以反应更细微的变化,且感应距离较短。
而铁芯-非铁芯混合型巴鲁夫接近开关,则结合了两种传感器的优点,同时具备较高的灵敏度和检测距离。
巴鲁夫接近开关的检测距离与金属物体的大小、形状和材质等因素有关,一般有标定值。
检测距离越大,巴鲁夫接近开关所检测到的金属物体必须越大。
应用场景巴鲁夫接近开关广泛应用于自动化控制系统中,常用于以下场景:1.钢铁、冶金、机床领域的材料检测、零件检测、传感器控制等;2.电子及半导体加工产业中的印刷线路板检测、电子元件检测等;3.化工、船舶、航空等领域的液位检测、流量检测、控制等。
巴鲁夫接近开关在实际应用中有时候会出现误检测或漏检的情况,对于这种情况,可以根据实际需求选择不同的接近开关或增加合适的外部电路,以达到更好的控制效果。
总结巴鲁夫接近开关作为一种广泛应用于工业自动化控制系统中的传感器,具有无接触、高灵敏度、长寿命等优点。
巴鲁夫BALLUFF行程开关819系列资料下载BALLUFF巴鲁夫行程开关原厂技术资料,内附高清实物图!德国巴鲁夫公司BALLUFF GmbH)成立于1921年,在广阔的工业应用领域,尤其是机械装备领域为用户提供创新的、有经验的传感器运用方案。
是世界范围内首屈一指的传感器制造商,产品包括了一个完整的电子式和机电式行程开关系列、光电开关、感应式接近开关、电容开关、直线位移传感器,RFID识别系统,以及各种插接件产品。
【产品名称】:德国BALLUFF行程开关【原产地】: 德国【品牌】:德国巴鲁夫【产品型号】:★BNS819-B02-D12-61-12-3B两联【产品说明】★行程开关根据其用途的不同,可以分为两联,三联,四联,多联等等。
★我公司主要的产品是两联行程开关,一般应用于相对值的数控机床系列,用来反馈机床工作台的加工区域。
【特点说明】:★双向引线,出线方便★合金镍钢头,耐磨损★外表度碳钢,不生锈★加防油垫,不进油★触点感应精度高【详细说明】1.行程开关根据其用途的不同,可以分为两联,三联,四联,多联等等。
我公司主要的产品是两联行程开关,一般应用于相对值的数控机床系列,用来反馈机床工作台的加工区域。
2.打开其后盖,会看见两组接线端子排(6个端子),一个接地端子3.松开两头的接线封口蓝色螺丝帽(M20),就可以根据需要进行接线,线接好后,一定要把没有用到的那头螺丝帽(M20)以及后盖拧紧,以防止有异物进入,缩短使用寿命。
原装BALLUFF巴鲁夫行程开关型号列举BNS819-X512-B04-R08-46-13-FCBNS819-X512-B04-R08-46-13BNS819-X512-B04-R08-40-13BNS819-X512-B04-E12-61-12-10BNS819-X512-B04-D08-40-13BNS819-X512-B03-E08-40-13BNS819-X512-B03-D08-40-11BNS819-X512-B02-K08-40-12-FCBNS819-X512-B02-E12-61-24-10BNS819-X512-B02-D08-40-13BNS819-X512-B02-D08-40-11BNS819-X512-99-R-12-S4BNS819-X512-99-E-13BNS819-X512-100-R-12-S4BNS819-X512-100-R-10BNS819-X512-100-K-13BNS819-X512-100-E-13BNS819-X512-100-D-13-S4BNS819-X512-100-D-12-S4BNS819-X512-100-D-10BNS819-X511-99-D-10-S4BNS819-X510-99-R-10BNS819-X505-99-R-10BNS819-X505-99-K-10BNS819-X505-99-D-10BNS819-X499-100-R-11BNS819-X497-99-R-10BNS819-X497-99-K-10BNS819-X497-99-D-10BNS819-X496-99-R-11BNS819-X496-99-R-10BNS819-X496-99-P-11BNS819-X496-99-P-10BNS819-X495-B02-D16-72-10 BNS819-X492-D08-L12-100-10-FD BNS819-X492-D06-L12-100-10-FD BNS819-X492-D04-L12-100-10-FD BNS819-X481-B03-D08-40-11 BNS819-X481-B02-D08-40-11 BNS819-X481-99-R-10BNS819-X481-99-K-10BNS819-X481-99-D-10BNS819-X428-D04-D12-100-10。

Inductive SensorsBalluff offers a variety of inductive sensor solutions: standard designs, block styles, extended range, weld field-immune, specialized sensing – whatever the need, there’s a Balluff inductive sensor that will provide optimum service. Balluff sensors are found in machine tool equipment, the plastics industry, textile production machines, woodworking, automotive manufacturing – wherever there is a need to automate. From Mini to Maxi block style sensors from 5 x 5 mm to 80 x 80 mm, and tubular housings from 3 mm to 30 mm sizes, Balluff inductive sensors monitor, control, measure, and automate production sequences with high reliability and freedom from wear. Photoelectric SensorsBalluff photoelectric sensors are designed to provide specific process tracking, position information, and part quality solutions in all areas of the automation process. They are especially suited for applications in robotics, assembly, and material handling. Along with tubular housings both in plastic and metal sized from 5 mm to 30 mm, Balluff also offers a range of sensors in rigid, block-shaped plastic housings. From classic diffuse, retroreflective, and thru-beam types to more specialized versions, the Balluff photoelectric line will handle the toughest applications. Cylinder & Valve SensorsMagnetic field sensors are primarily used for monitoring the piston position on pneumatic cylinders. The magnetic field of a magnet embedded in the piston is detected by the sensor through the cylinder housing wall. Thanks to their non-contact position sen-sing capability, these electronic magnetic field sensors are reliable, wear-free, and are finding ever-wider use. Balluff offers perfect solutions for a variety of typical pneumatic cylinders. Balluff’s universally compatible range of cylinder sensors with their engineered mounting bracket kit concept will fit virtually any cylinder shape or size.Capacitive SensorsCapacitive sensors detect the change in capacitance caused by the approach of an object in their electrical field. These sensors find broad use in sensing metals, plastics, or liquids and are used extensively in applications involving packaging, plastics handling, and liquid level sensing.Remote SystemsSensors are often required to rotate or follow the movement of a machine component or part being manufactured. This often results in repeated twisting and tangling of wiring, resulting in cable wear and ultimately failure. Balluff power remote systems consist of a transmitter and receiver unit that transmits power and sensor information through an air gap. They eliminate wiring failure while providing noise and contactless wear-free operation even in extreme conditions.Connectors/connectorsID SystemsTransducersBalluff Micropulse linear position transducers provide highly accurate and reliable position control signals. Balluff’s non-contact magnetostrictive technology means performance does not degrade over time, as with linear potentiometers.Micropulse transducers are available with a variety of housingstyles and electrical outputs to fit a wide range of applications and are very popular in the lumber industry, plastic injection and blow molding, tire and rubber manufacturing, stamping presses, die casting, and all types of automated machinery where a continuous, absolute position signal is required.AccessoriesA compete range of accessories helps save costs and provides optimum sensor integration in any environment. In addition toprotecting Balluff sensors, our accessory line is designed to permit precise, lasting sensor location positioning while permitting quick sensor change out at any time.Connectivity ProductsA comprehensive line of cables, cordsets, and connection blocks complement our product line, facilitating sensor use in every area of automation. Balluff offers custom application expertise on request.Mechanical SwitchesEngineered for the most demanding switching requirements and harsh environmental conditions, Balluff cam switch systems are still the preferred solution of automatic machinery builders around the world. Key applications include control of automatic machine tools, overtravel limiting, and robot dynamic zone control.Balluff provides a range of RFID systems to track work in progress and provide feedback on in-process testing. Computer-assisted manufacturing, modern warehouse systems, flexible assembly lines, plus logistics and distribution systems benefit from Balluff BIS RFID systems. BIS components are available in plastic or metal housings and plug-in versions to meet any applicationrequirement. Balluff has developed a complete line of easy to use read-only systems that interface directly into a PLC throughdiscrete inputs or an RS-232 interface. These systems offer data reliability and environmental ruggedness not found in bar code systems. Read-only systems are ideal when product data are stored centrally in a control system and referenced by a code contained on RFID tags located on products, parts, or pallets.Miniature, long-rangeinductive proximitysensorsSpecializedphotoelectricsensorsA new level of reliabilityand performance frompneumatic cylinderposition sensorsUltra-reliable RFIDsystems with the latestin connection options Rugged, long-rangeinductive proximitysensorsAccurate and reliablephotoelectricsensorsThe industry standardmultiple mechanicalswitchesUltra-reliable RFIDsystemsRugged, long-rangeinductive proximitysensorsAll types of lasers,true color, and UVsensorsUltra-reliable RFIDsystems with the latest inconnection optionsBalluff MeansIndustry ExpertiseSpecial coatingsprovide weld-fieldimmunity withBalluff's weld-specificproximity sensorsA new level ofreliability and weld-field immunity withpneumatic clampsensorsDynamic zonerestriction usingBalluff multiplemechanical switchesEliminate troublesomeconnection problemswith Balluff's powerremotesIntro/aboutRugged, long-range inductive proximity sensors for machine Long-range lasers for error proofing and position feedbackSteel face and long-range inductive proximity sensorsMiniature tubular andblock style sensors are easily bunkered within the dieReliable detection of plastic parts and pellets with Balluff's capacitive Reliable position feedback with Micropulse magnetoresistive linear Rugged, long-range inductive proximity sensors for machine Long-range lasers for positioning and UV sensors for wood gradingPhotoelectirc/photoelectrics18 mm Diameter18 mm Diameter18 mm Diameter30 mm Diameter18K 18KF/18KW 18M/18E Threaded Combination ThreadedPlasticStraight or Right AngleThreaded Tubular Style Block Style Specialty– Sensing modes include: - 50 m, 60 m Thru-Beam- 9 m, 16 m Polarized Retroreflective - 250 mm Diffuse– Highly visible safe Class I Laser emission – Simple potentiometer adjustment – Straight or right angle versions – M12 connector or cable outBlock Style Photoelectric Sensors8x8x50 mm31x55x13 mm LaserLaser5K 32x20x11 mm 6K 32x20x12 mm5K & 6K 23x44x13 mm 42x29x13 mm20x7.5x10 mmPhotoelectirc/photoelectrics65x55x20 mm90x73x30 mm55x86x26 mm70x90x35 mm85x72.5x32 mm66M 25K 50x50x18 mm 26K 50x50x17 mmTubular Style Block Style SpecialtySpecialty Photoelectric SensorsPlastic or Metal 18 mm Diameter30x20x12 mm 18 mm Tubular 30x20x12 mm 32x20x12 mm 50x50x17 mm 50x50x25 mm 70x90x35 mm 5, 10, 20, 30, 50,80, 120, 180,Photoelectirc/photoelectricsPlastic 2, 4, 5 mm Smooth Tubular, 3, 5, 6 mm 22 mm/22 mm 43 mm/43 mm 42 mm/62 mm36x52x15 mm18 mm, 50x65x10 mm28x69x13 mm 30.7x54.6x13 mm 30.7x67.3x13 mm 30x60x13 mm 30x60x9 mm Tubular Style Block Style Specialty– No alignment necessary – Simple mounting, no hardware requiredBGLAdvanced Slot Sensors ·1-800-543-8390Specialty Photoelectric Sensors50x50x17 mm50x50x25 mm18 mm DiameterNew Specialty Photoelectric Sensors63MAnalog Distance Sensor– 3 channel color sensor with C (Chromaticity) or C+I (Chromaticity and Intensity) functions– RGB value via RS485 offers millions of color combinations – Wide spectrum white light LED emission improves color detection– 3 independent NPN or PNP outputs– RS485 interface used for: - remote set-up - teaching color- changing tolerance and timer settings- chromacity or chromacity and intensity settings– Small laser spot for detecting small objects over large distances– Virtually unaffected by the reflective properties of the object within aparticular sensing range – Background suppression (HGA) is adjustable over the entire working range – Discrete sensing and alarm outputs27KAdvanced Full Color Sensor25Photoelectirc /photoelectrics18 mm Diameter100 mm, 150 mm,300 mm LightGrids40x80 mm, 80x80 mm,120x80 mm Dynamic50x43x15 mm83x58x31 mm18 mm Diameter32x20x12 mmTubularStyleBlockStyleSpecialty- 0 to 10 Vdc analog output– Static outputs can detect movingor stationary targets– Rugged metal housing withstands– M8 connection for。
德国BALLUFF位移传感器信息参考来源:广州兰瑟电子科技德国BALLUFF位移传感器分类:BNS完整电子式、机电式行程开关系列、BOS光电开关、BES感应式接近开关、电容开关、BMF磁敏开关,BTL直线位移传感器,RFID识别系统,插接件等。
德国BALLUFF位移传感器型号描述:巴鲁夫(BALLUFF)电感式接近传感器BES 113-356-SA6-S4巴鲁夫(BALLUFF)电感式接近传感器BES 516-300-S 135-S 4-D 巴鲁夫(BALLUFF)电感式接近传感器BES M08MI-PSC20B-BV03 巴鲁夫(BALLUFF)电感式接近传感器BES113-356-SA6-PU-03 巴鲁夫(BALLUFF)电感式接近传感器BES113-356-SA6-PU-05 巴鲁夫(BALLUFF)电感式接近传感器BES516-329-14-C-03巴鲁夫(BALLUFF)电感式接近传感器BES516-329-14-C-05巴鲁夫(BALLUFF)电感式接近传感器BESM08EC-PSC15B-S49G 巴鲁夫(BALLUFF)电感式接近传感器BESM12I-PSC20B-S04G 巴鲁夫(BALLUFF)电感式接近传感器BESM12I-PS0B-S04G巴鲁夫(BALLUFF)位移传感器BAW G06EE-UAF20B-EP03-K巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP015-GS04巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP03巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP05巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD25F-BP-03巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP002-GS04 巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP015-GS04 巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP03巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP05巴鲁夫(BALLUFF)位移传感器BAW M12MI-UAC20B-S04G巴鲁夫(BALLUFF)位移传感器BAWM08EI-UAD15B-BP002-GS04 巴鲁夫(BALLUFF)电容式接近传感器BCS 010-PSB-1-L-P02巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PS-1-L-S 4巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PSB-1-L-S 4巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PSB-1-L-S4巴鲁夫(BALLUFF)电容式接近传感器BCS G34KN2-NSC24G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS G34KN2-PSC24G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS M30KN2-NSC18G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS M30KN2-PSC18G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS-20GM10-XPA1Y-8B-03巴鲁夫(BALLUFF)微型断路器BOS-18M-PA-1PD-E5-C-S4,巴鲁夫(BALLUFF)微型断路器BCS20MG10-XPA1Y-8B巴鲁夫(BALLUFF)微型断路器BCS20MG10-XPA1Y-8B-03巴鲁夫(BALLUFF)微型断路器BES 516-114-S4-C 10-30V巴鲁夫(BALLUFF)微型断路器BES113-356-SA6-S4巴鲁夫(BALLUFF)微型断路器BES113356SA6-S4巴鲁夫(BALLUFF)微型断路器BES516-300-S135-S4-D巴鲁夫(BALLUFF)微型断路器BES516-347-M0-C-03巴鲁夫(BALLUFF)微型断路器BES517-140-P5-H巴鲁夫(BALLUFF)微型断路器BESM12MI-PSC20B-S04G巴鲁夫(BALLUFF)微型断路器BESM12MI-PS0B-S04G巴鲁夫(BALLUFF)微型断路器BKS-S33M-00?巴鲁夫(BALLUFF)微型断路器BOS15K-S-E1-P-S75巴鲁夫(BALLUFF)微型断路器BRGB3-W AB12EP-P-R-K-SA8-0.3 巴鲁夫(BALLUFF)微型断路器BRGC5-W AP360-0P-G-0-SR巴鲁夫(BALLUFF)微型断路器BTL5-E10-M2000-B-S32巴鲁夫(BALLUFF)微型断路器BTL5-S173-M0206-P-S32巴鲁夫(BALLUFF)微型断路器dks-s20-2-05巴鲁夫(BALLUFF)微型断路器BES516-3005-E4-C-PU-05巴鲁夫(BALLUFF)微型断路器BES113-356-SA31-S4巴鲁夫(BALLUFF)微型断路器BES516-300-S-135-S4-D 36V巴鲁夫(BALLUFF)微型断路器BES516-3021-G-E4-C-PU-02巴鲁夫(BALLUFF)微型断路器BES516-3022-G-E5巴鲁夫(BALLUFF)微型断路器BES516-325-G-S4-C巴鲁夫(BALLUFF)微型断路器BES516-325-S4-C巴鲁夫(BALLUFF)微型断路器BES516-362-S4-CW巴鲁夫(BALLUFF)微型断路器BES516-371-SA10-S4-003巴鲁夫(BALLUFF)传感器控制器BKS-S32M-C-00巴鲁夫(BALLUFF)电感式接近传感器BTL5-S173-M0350-B-S32 巴鲁夫(BALLUFF)电感式接近传感器BTL-P-1012-4R巴鲁夫(BALLUFF)光电开关BOS18M-PS-1XB-E5-C-S4巴鲁夫(BALLUFF)电感式接近传感器BRGB3-W AB12-EP-P-R-K-SA8-03。
30BMF 235 T-slot – Drop-inBMF 204 and BMF 214 C-slot – Slide-inThese magnetic field sensors are C-slot styles that are bracketless and provide rock-solid holding.Sensors forPneumatic CylindersBalluff Global – Magnetic Field204/214 C-slot, 235 T-slot, 243 C-slotBalluff’s magnetic field cylinder sensors are based on non-contact, solid-state sensor technology that is compatible with both reed and Hall Effect magnetic pole orientations, making them the ideal replacement for standard magnetic switches. Electrically rugged, they feature short circuit protection, overload protection, and reverse polarity protection…all backed by Balluff’s exclusive Lifetime Warranty. Improved sensorperformance and better reliability results in less downtime and increased productivity. With Balluff’s magnetic field sensors, you install and forget them.Balluff’s compact BMF sensors are designed to fit either C-slot or T -slot extrusions and require no additional brackets for mounting. These sensors fit flush into the slot, offering better sensor protection…nothing sticking out and nothing in the way. Flush mounting sensors make installation in space critical applications easier and less time consuming. In addition, cable clips are included forcleaner cable routing and better strain relief.BMF 243 C-slot – Drop-inPosition detection with compactsensors for C-slotsBMF 204 – Designed for 3.8 mm slot BMF 214 – Designed for 4 mm slot ■■Slides into the C-slot from the end ■■Superior holding strength■■Miniature design for short stroke cylinders and grippers■■Precise, accurate positioningPosition detecting with compact sensors for C-slotsBMF 243 C-slot – Single sensor■■New mounting design – solid hold in the slot■■Drop-in installation – can be installed even on cylinders with an end plate ■■Compact design – flush mounted ■■Short housing (24 mm) – can be used in space-critical applicationsPosition detection with compact sensors for T -slotsBMF 235 – The new standard for every T -slot■■Large, ultra-bright LED for easy diagnostics■■Installs from above into the T -slot – drop-in installation■■Installs with standard screwdriver or 1.5 mm Allen wrench■■Short, compact design with greater holding strengthC o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ▪ M o t i o n C o n t r o l ▪ H y d r a u l i c ▪ P n e u m a t i c ▪ E l e c t r i c a l ▪ M e c h a n i c a l ▪ (800) 426-5480 ▪ w w w .c m a f h .c o m31■Consult Balluff website for latest technical and wiring specifications.Balluff Global – Magnetic Field204/214 C-slot, 235 T-slot, 243 C-slotC o u r t e /H y d r a d y n e ▪ M o t i o n ▪ P n e u m a t i c ▪ E l e c t r i c a l 6-5480 ▪ w w w .c m a f h .c o m32Substantial savings when using two sensors on one cylinder ■■One, four-conductor cable verses two, three-conductor cables ■■Less installation hardware ■■Fewer wiring terminations ■■Less installation time■■Lower initial costs compared to two separate sensors■■Double the number of sensors into a multiple interface block or sensor hubBalluff’s V-Twin ® magnetic field sensors provide two sensors with a single connector in either an M8 or M12 configuration.V-Twin ® M8V-Twin ® M12Know Your Cylinder?Find Your Sensor.Balluff’s exclusive, easy-to-use online Pneumatic Cylinder Sensor Resource Center is designed to help you select the best solution for specific cylinder models. The web-based interface will generate up to three sensor recommendations for each application. The Resource Center is designed to help you make a preliminary selection of products so you can download sensor datasheets and mounting bracket installation instructions.The Resource Center will reduce your design time, aid you in component standardization, and ultimately provide you with a reference guide that will help reduce downtime when a replacement sensor is needed.Visit: /bmfcenterBalluff Global – Magnetic FieldBMF V-Twin®C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ▪ M o t i o n C o n t r o l ▪ H y d r a u l i c ▪ P n e u m a t i c ▪ E l e c t r i c a l ▪ M e c h a n i c a l ▪ (800) 426-5480 ▪ w w w .c m a f h .c o m。
1) Membrane 2) LED orange 3) LED green4) Cable lengthBasic featuresApproval/ConformityCE cULus WEEEFunction Vibration Velocity Vibration Acceleration Vibration Severity Zone Contact Temperature Relative Humidity Ambient Pressure Sensor Self-AwarenessPrinciple of operation Condition Monitoring Sensors SeriesR15Display/OperationDisplayRun - LED greenCommunication - LED green, slow flashing (1 Hz)Ping - LED green, asyncronous very fast flashing (4 Hz) and fast flashing (2 Hz)Event - LED orange, fast flashing (2 Hz)Electrical connectionBending radius min., fixed cable 3 x D Bending radius min., flexible cable 5 x DCable diameter D 2.9 mm +0.1/-0.05 mm Conductor cross-section 0.14 mm²ConnectionCable with connector, M12x1-Male, 3-pin, 1.5 m, PUR Number of conductors 3Polarity reversal protected yes Protection against device mix-ups yes Short-circuit protectionyesElectrical dataCurrent draw max.10 mA Operating voltage Ub 18...30 VDC Protection classIII Rated operating voltage Ue DC 24 V Ready delay tv max.1.5 sEnvironmental conditionsAmbient temperature0...70 °CEN 61000-4-2, ESD Severity Level 2 EN 61000-4-3, RFI Severity Level 3 EN 61000-4-4, Burst Severity Level 4 EN 61000-4-6, High-frequency fields Severity Level 3 IP rating IP67Storage temperature-20...70 °CFunction module ambient pressure Ambient pressure, measuring range300…1100 hPa Ambient pressure, non-linearity±0.1 %FS Ambient pressure, resolution0.15 hPaFunction module contact temperature Contact temperature, measuring error±2 %FSContact temperature, measuringrange0…70 °CContact temperature, non-linearity±0.75 %FS Contact temperature, resolution0.1 °CContact temperature, settling time 5 min Function module relative humidity Relative humidity, measuring range5…95 %rF Relative humidity, non-linearity±2.5 %FS Relative humidity, resolution 1 %rFRelative humidity, settling time 5 min Function module vibrationVibration, frequency range 2...3200 Hz Vibration, measuring principle MEMS Vibration, number of measuring axes3Vibration, sampling rate6400 Hz Function module vibration accelerationVibration acceleration, measuringerror RMS±5%*********Vibration acceleration, measuringrange RMS0…16 gVibration acceleration, non-linearityRMS±2%*********Vibration acceleration, resolutionRMS*************Vibration acceleration, statistical evaluation variables [for each measuring axis]RMSPeak to PeakFunction module vibration velocityVibration velocity, evaluationvariables [for each measuring axis]RMSPeak to PeakMeanStandard DeviationCrest FactorSkewnessKurtoisisVibration velocity, measuring errorRMS±5%*********Vibration velocity, measuring rangeRMS0…220mm/********Vibration velocity, non-linearity RMS±2%*********Vibration velocity, resolution RMS0.42mm/********MaterialHousing material Stainless steel (1.4404),Membrane: ePTFE with nylonfleeceMechanical dataDimension20 x 10 x 32 mmMounting Screw M3 (2x)Weight30 gOutput/InterfaceBaud rate COM3 (230,4 kBaud)Interface IO-Link 1.1Interface setting option Flexible process dataconfigurationVibration measurement based onISO 10816-3Data preprocessing (statistics)Events (pre-alarms and mainalarms)Delay times for alarmsSearch function with LED display(ping)Process data IN20 bytesProcess data OUT0 bytesProcess data cycle min.10 msRemarksFor additional information, refer to user's guide. Order accessories separately.For more information about MTTF and B10d see MTTF / B10d CertificateIndication of the MTTF- / B10d value does not represent a binding composition and/or life expectancy assurance; these are simply experiential values with no warranty implications. These declared values also do not extend the expiration period for defect claims or affect it in any way.Connector DrawingsWiring Diagrams。
Balluff德国工业品巴鲁夫(BALLUFF),成立于1921年,是一个世界领先的传感器制造商,提供创新和实际感测解决方案,为汽车行业、冶金行业、机床行业、风电行业提供广泛的应用和产业。
总部位于德国斯图加特下的挪因豪森,享有最高的国家之一增长率在自动化产业、能源产业,在德国、美国、瑞典、巴西、匈牙利、中国及日本拥有生产基地。
市场遍布全球,注重本土化与全球化共同发展BALLUFF-0001 接近开关BES-516-542-B0-HBALLUFF-0002 接近开关(带插头)BES M12M1-PSC4BALLUFF-0003 CONTROL UNIT BSW 819-494 06 L3BALLUFF-0004 BCS-018PS1CS4 电容接近开关BALLUFF-0005 BCS-018PO1CS4 电容接近开关BALLUFF-0006 编码器BDG6360-2-10-30-W170-250BALLUFF-0007 BES 516-377-G-E5-C-S49BALLUFF-0008 BES 516-362-S4-W 10-30VBALLUFF-0009 BES 516-356-S4-W 10-30VBALLUFF-0010 BTL5-E10-M0700-P-S32BALLUFF-0011 BESM08MHI-PSC15B-S04GM8BALLUFF-0012 BTL5-E10-M0500-PS32BALLUFF-0013 BTL5-E10-M0350BALLUFF-0014 BTL5-E10-M0350-P-S32BALLUFF-0015 BNS113-B02-R12-61-A-20-01BALLUFF-0016 BNS113-B03-R12-61-A-20-01BALLUFF-0017 BKS-S-32M-00线性位置传感器接头BALLUFF-0018 AX80R100-EA光栅接收器BALLUFF-0019 BTL5-E10-M500-K-K02 传感器BALLUFF-0020 BES 516-300-S266-S4BALLUFF-0021 BTL5-HLL3-M3000-P-S92BALLUFF-0022 BKS-S92-00BALLUFF-0023 BLE 18M-BA-1LT-S4-CBALLUFF-0024 BTL5-I1-M0175-P-S32BALLUFF-0025 BDG6360-2-10-30-W170-5000BALLUFF-0026 BES516-326-S4C 开关BALLUFF-0027 BES516-300S135-S4 开关BALLUFF-0028 BTL5-E10-M1700-P-S32 带接头BALLUFF-0029 BTL5-M-2814-1S 传感器BALLUFF-0030 BTL5E10M1200BKA10BALLUFF-0031 BTL5E10M0700BKA10BALLUFF-0032 接近开关 BES 516-114-SA1-15 BALLUFF-0033 传感器 BTL5-S162B-M1600-B32 BALLUFF-0034 传感器 BTL5-S165-M2000-P-S32 BALLUFF-0035 BTL5-E10-M0130传感器BALLUFF-0036 EBSM12MINS C40B-S04G接近开关BALLUFF-0037 BTL5-S118-M0600-P-S147 BALLUFF-0038 BTL5-S118-M2000-P-S30BALLUFF-0039 BESM18M1-PSL50F-BV03 电眼BALLUFF-0040 BES516-216-E4-B-03-BBALLUFF-0041 BES Q40KEU-USU15B-S21G-AA BALLUFF-0042 BES Q40KEU-UOU15B-S21G-AC BALLUFF-0043 BKS-S21 接近开关附件BALLUFF-0044 BES516-216-E4-E-03-B 接近开关BALLUFF-0045 BES516-325-G-E5-Y-S49限位开关BALLUFF-0046 BOD66M-LA04-C-S92BALLUFF-0047 BEL18M-PS-1P-E5-C-S4接受器BALLUFF-0048 BEL18M-XX-1P-E5-L-S4BALLUFF-0049 BAW030-PF-1-K-05 传感器BALLUFF-0050 BTL5-F-2814-1S 传感器BALLUFF-0051 BTL5-E10-M0178-P-KA10/US BALLUFF-0052 BTL5-E10-M0127-P-KA10/US BALLUFF-0053 BTL5-E10-M0127-P-S32 传感器BALLUFF-0054 BTL-P-1013-4R 磁环BALLUFF-0055 BTL5-E10-M3900-BS32 传感器BALLUFF-0056 BTL5-E10-M0800-BS32 传感器BALLUFF-0057 BTL5-E10-M0350-BS32传感器BALLUFF-0058 BTL5-E10-M0300-BS32传感器BALLUFF-0059 BES-516-300-S135-S4-D 传感器BALLUFF-0060 BES-516-324-G-E0-C-PU-03传感器BALLUFF-0061 BTL5-C10-M0600-B-S32BALLUFF-0062 BTL-5-E17-M0914-R-SU185-S4 BALLUFF-0063 BTL5-E17-M0661-R-SU185-S4 BALLUFF-0064 BES516300S162S4BALLUFF-0065 BTL5-H114-M0250-B-S94 BALLUFF-0066 BTL5-H114-M425-B-S92 BALLUFF-0067 BTL5-S173-M0700-B-KA05 BALLUFF-0068 BTL5-E10-MO950BALLUFF-0069 BES M18MI-PSC80B-S04K BALLUFF-0070 BTL5-S171-M0400-K-SR32 190139 BALLUFF-0071 MAGNET: BTL-P-1012-4RBALLUFF-0072 连接器: BKS-S 32M-20BALLUFF-0073 BTL5-S172-M0250-K-K15 BALLUFF-0074 BTL5-E10-M1700-P-S32 BALLUFF-0075 BTL5-E10-M100-K-SR32 BALLUFF-0076 BES113-356-SA6-S4 BALLUFF-0077 BNS813-B02-R12-61-A-20-01 BALLUFF-0078 BTL5-S172-MO515-Z-KA15 BALLUFF-0079 BTL5-S172-M0335-Z-KA15 BALLUFF-0080 BTL5-S172-M0135-Z-KA15 BALLUFF-0081 BTL5-S172-M0380-Z-KA15 BALLUFF-0082 BTL5-S171-M0625-B-KA15 BALLUFF-0083 BTL5-S177-M1025BALLUFF-0084 BTL5-S177-M0865-B-KA15 BALLUFF-0085 BES516-300-S266-S4BALLUFF-0086 BES 516-324-SA26 M8x1/DC BALLUFF-0087 BTL5-E10-M1200-B-KA10 BALLUFF-0088 BTL5-E10-M0700-B-KA10 BALLUFF-0089 BMF32M-PS-C-2-S49BALLUFF-0090 BTL5-G11-M0050-B-KA05 BALLUFF-0091 BTL5-M0050-BHKPBALLUFF-0092 BTL5-S101-M0300-K-SA243-SR32 BALLUFF-0093 BES516-300-S295-/2.875-S4 BALLUFF-0094 BTL5-S171-M0500-B-KA05 BALLUFF-0095 BES516-327-S4-CBALLUFF-0096 BES M12EL-POC40B-S04G带底坐BALLUFF-0097 BTL5-S175-M3250-P-S32 BALLUFF-0098 BTL5-P1-N0250-K-K10 BALLUFF-0099 BTM-H1-240BALLUFF-0100 BTL5-A11-M0600-B-KA02 0-10V BALLUFF-0101 BT15-P1-M0250-K-K10 BALLUFF-0102 BTL2-GS10-0200-ABALLUFF-0103 BTL2-GS10-0400-ABALLUFF-0104 BKS-S-32M-0500BALLUFF-0105 BKS-S-33M-0500BALLUFF-0106 BES M12M1-PSC20B-SO4G接近开关BALLUFF-0107 BTL5-E10-M2000-B-S32 BALLUFF-0108 BTL5-A11-M0600-B-KA025 BALLUFF-0109 UB:24VDC.PNPBALLUFF-0110 BTL5-S171-M0150-B-S32 BALLUFF-0111 BTL5-E10-0650-PS32带磁头BALLUFF-0112 BTL5-S171-M0150-B-S32 BALLUFF-0113 BES516-362-S4-CWBALLUFF-0114 BNS819-BO3-R12-61-12-10 BALLUFF-0115 BTL5-S173-M0105-B-KBALLUFF-0116 BTL2-P-38B-4SBALLUFF-0117 BTL5-E10-M0525-B-S32BALLUFF-0118 BTL5-E10-M0785-B-S32BALLUFF-0119 BTL5-E10-M0600-P-S32BALLUFF-0120 BTL5-E10-M0900-P-S32BALLUFF-0121 BTL5-E10-M1250-P-S32BALLUFF-0122 BTL5-F-2814-ISBALLUFF-0123 BKSS32M-02BALLUFF-0124 BES516-327-G-BO-CBALLUFF-0125 BESM18ELPSC80BS04GBALLUFF-0126 BTL-S171-M0200-P-KA05 BALLUFF-0127 BES 516-125-SA1-03接近开关BALLUFF-0128 BES516-327-G-BO-C-PU接近开关BALLUFF-0129 BES516-326-G-BO-C-PU接近开关BALLUFF-0130 BES516-325-E5-C-S4接近开关BALLUFF-0131 BES516-125-SA1-PU接近开关BALLUFF-0132 BES516-325-G-E5-Y-S4接近开关BALLUFF-0133 BES516-114-SA1-15接近开关BALLUFF-0134 BOS21M-PA-ID10-S4光电开关BALLUFF-0135 BTL5-S162-M1000-A-SA211-KA10 BALLUFF-0136 BTL5-E10-M1100-B-KA05 BALLUFF-0137 BTL5-E10-M0650-P-S32 BALLUFF-0138 BES516-327-G-S4-CBALLUFF-0139 BESM18MF-PSC08B-S04G BALLUFF-0140 1-800-543-8390BALLUFF-0141 BTL5-E10-M0250-B-S32带高温电缆BALLUFF-0142 BKS-S32M-00BALLUFF-0143 BTL5-S173-MO125-B-SA73-KA05 BALLUFF-0144 BLE-18M-PS-1P-E5-C-S4 BALLUFF-0145 BLF-18M-XX-1P-E5-L-S4 BALLUFF-0146 BES516-325-S4-CBALLUFF-0147 BES516-326-E5-C-S4BALLUFF-0148 BESM18M1-PSC80B-S04GBALLUFF-0149 BTL5-S176-M0350-B-KA15 BALLUFF-0150 BTL5-S175-M1360-B-KA15 BALLUFF-0151 BTL5-S173-M0700-B-KA15 BALLUFF-0152 BTL5-S176-M1805-B-KA15 BALLUFF-0153 BTL5-S175-M550-B-KA15 BALLUFF-0154 BTL5-S174-M0320-B-KA15 BALLUFF-0155 BTL5-S175-M0570-B-KA15BALLUFF-0156 BTL5-S172-M0450-B-KA15 BALLUFF-0157 BTL5-S172-M0900-B-KA15 BALLUFF-0158 BTL5-E10-M0750-B-KA02 BALLUFF-0159 BTL5-E10-M1200-B-KA02 BALLUFF-0160 BTL5-S172-M0600-B-KA15 BALLUFF-0161 BTL5-S176-M1180-B-KA15 BALLUFF-0162 BTL5-S175-M0460-B-KA15 BALLUFF-0163 BTL5-S176-M2040-B-KA15BALLUFF-0164 BTL5-S175-M0640-B-KA15 BALLUFF-0165 BTL5-S172-M1200-B-KA15 BALLUFF-0166 BTL5-S172-M1000-B-KA15 BALLUFF-0167 BTL5-S172-M0860-B-KA15 BALLUFF-0168 BTL5-S176-M1640-B-KA15 BALLUFF-0169 BTL5-T110-M0650-B-S103带电缆BALLUFF-0170 BES113-356-SA23-S4BALLUFF-0171 BES 516-326-E5-C-S4BALLUFF-0172 BES 516-370-G-E5-Y-S4 BALLUFF-0173 BES 516-326-G-E5-C-S4BALLUFF-0174 BES 516 360-G-S 4-HBALLUFF-0175 BES M18MI-PSC80BS04G BALLUFF-0176 BES 516-300-5249-S4-D BALLUFF-0177 BES 516-326-E4 CPU-05 BALLUFF-0178 BES M12EL-PSC20B-S04G-M01 BALLUFF-0179 BES 516-356-E5-C-S4BALLUFF-0180 BES516-327-S4-YLBALLUFF-0181 BTL5-T110-M0400-B-S103 BALLUFF-0182 BAW M18ME-UAC50B-S04G BALLUFF-0183 BES 516-3005-G-E4-C-PU-05 BALLUFF-0184 BHS B135V-PSD25-S04-003 BALLUFF-0185 BTL5-T110-M0100-P-S103 BALLUFF-0186 BKS-B19-1-03BALLUFF-0187 接近开关BESM08MI-PSC15BS49G BALLUFF-0188 BGL30A-001-S49BALLUFF-0189 BKS-B48-1-05BALLUFF-0190 BES12.0-KH-2L附件BALLUFF-0191 BESIKV-045.23-G-Z-S4接近开关BALLUFF-0192 BOS15K-R-B2-P-S75光电开关BALLUFF-0193 BOSR-8-22附件BALLUFF-0194 BKS-B75-3-PU-05接插件BALLUFF-0195 BTL5-E10-M0600-BK-KA02M1HK65 BALLUFF-0196 磁环BTL-P-1013-4R BALLUFF-0197 GD:2546809005BALLUFF-0199 BES516-105-S4-C 接近开关BALLUFF-0200 BES516-114-S4-C 接近开关BALLUFF-0201 BES516-300-S262-S4-D BALLUFF-0202 BES516-300-S266-S4 BALLUFF-0204 BOS18M-PA-1PD-E5-C-S4光电开关BALLUFF-0206 BOS35K-PO-1VD-SA-C 光电开关BALLUFF-0207 BTL2-E10-3550-P-SA74-S32 BALLUFF-0208 BES516-324-SA56-E5-C-S49 BALLUFF-0209 BESQ40KFU-PAC35E-S04G BALLUFF-0210 BESM12MI-PSH80B-S04G BALLUFF-0211 BTL5-E10-M0400-P-S32 BALLUFF-0212 BES 516-3006-G-E5-C-S49 BALLUFF-0213 BES M08MG1-PSC60F-S49 BALLUFF-0214 BCS M05T4C-XXS10C-EP03 BALLUFF-0215 BTL5-E17-M1300-P-S32 BALLUFF-0216 BES516-200-S2-/2.275-S21 BALLUFF-0217 BTL5-E17-M0425-S-SA230-K15 BALLUFF-0218 BSW819-494-06K3BALLUFF-0219 BTL5-E10-M0340-B-KA05 BALLUFF-0220 BTL5-S165-M1700-K-SR32 BALLUFF-0221 BTL5-S165-M600-K-SR32 BALLUFF-0222 BTL5-S165-M1100-B-S32 BALLUFF-0297 BES516-325-G-E4-Y-S4-00-5 BALLUFF-0298 BES516-371-G-E4-C-PU-03 BALLUFF-0299 BESM12MI-PSC40B-S04G BALLUFF-0300 BESM30M1-PSC15B-BP-05 BALLUFF-0301 BESM8M1-PSC80B-S04G BALLUFF-0302 ETL5-E10-M0125-K-SR32 BALLUFF-0303 BTL5-E10-M0650-P-S32 BALLUFF-0304 BTL6-A110-M0450-A1-S115 BALLUFF-0305 BTL5-A11-M0750-P-S32 BALLUFF-0306 BTL5-A11-M0500-P-S32 BALLUFF-0307 BNS113-D2-D12-100 13FD-0219 BALLUFF-0308 BOS 12M-PS-EYA-S4-C BALLUFF-0309 BOS18M-PA-1QB-E5-C-S BALLUFF-0310 BTL5-E10-M01150-B-KA02 BALLUFF-0311 BES516-3013-G-SA2-S49-00.05 BALLUFF-0312 BES516-105-S-CBALLUFF-0313 D22-LAT-KB-EAK-10-02 BALLUFF-0314 BES516-3005-G-E5-C-S49/M5 BALLUFF-0315 传感器BI2-M12-Y1X-H1141 BALLUFF-0316 BTA-A11-1000-EBALLUFF-0317 BTL2-GS10-0100-ABALLUFF-0319 BTL5-E10-M0160-B-KA05 BALLUFF-0320 BTL5-E10-M0175-B-KA05 BALLUFF-0321 BTL5-S172-M0450-P-KA02 BALLUFF-0322 PCLD-881B NEV A1 01-2 BALLUFF-0323 734/733/730 INTERFACE CARD BALLUFF-0324 BEE516-361-B0-C-FS BALLUFF-0325 BTL5-E10-M0750-B-S32内置式BALLUFF-0326 BTL5-E10-M0914-P-S32外置式BALLUFF-0327 BTL5-E10-M1067-P-32外置式BALLUFF-0328 BTL5-T110-M0175-P-S103 BALLUFF-0329 BTL5-T110-M0240-P-S103 BALLUFF-0330 BTL5-T110-M0300-P-S103 BALLUFF-0331 BTL5-T110-M0360-P-S103 BALLUFF-0332 BTL5-T110-M0450-P-S103 BALLUFF-0333 BTL5-T110-M0500-P-S103 BALLUFF-0334 BTL5-T110-M0550-P-S103BALLUFF-0335 BTL5-T110-M0560-P-S103 BALLUFF-0336 BTL5-T110-M0600-P-S103 BALLUFF-0337 BTL5-T110-M0750-P-S103 BALLUFF-0338 BTL5-T110-M1200-P-S103 BALLUFF-0339 BTL5-T110-M1300-P-S103 BALLUFF-0340 BTL5-T110-M2500-P-S103 BALLUFF-0341 BTL5-T110-M3000-P-S103 BALLUFF-0342 BES546-300-S295-/1.250-S4 BALLUFF-0343 BES516-114-G-S4-HBALLUFF-0344 BOS65K-C200T-1BALLUFF-0345 BES516-105-GS4-HBALLUFF-0346 BES517-132-M3-HBALLUFF-0347 BES516-213-E4-E-03 两芯 8mm BALLUFF-0348 BES516-215-E4-E-03 两芯 10mm BALLUFF-0349 BESM12MG-USC 30B-BP03 两芯BALLUFF-0350 BTL5-P-38-2BALLUFF-0351 BTL5-A11-M0400-P-S32 BALLUFF-0352 BTL5-E10-M0450-P-S32带磁头BALLUFF-0353 BES 516-324-G-S49-C (M8-PNP) BALLUFF-0354 8米BES516-300-S162-S-D BALLUFF-0355 压力开关BES516-300-S164-S-4-D BALLUFF-0356 BES516-377-S4-CBALLUFF-0357 BNS819-B03-D12-61-12-3B BALLUFF-0358 BES113 356 SA6 PNPBALLUFF-0359 BKS-S20-1-03BALLUFF-0360 BEW30MI-PSE10B-S04GBALLUFF-0361 BESW18WI-PSC50B-305GBALLUFF-0362 BES516-300-S295/1.250-S4 BALLUFF-0363 BTL5-E10-M0050-B-KA10 BALLUFF-0364 BTL5-E10-M0050-B-DEXA-D-K10 BALLUFF-0365 BTL5-TNO-MOBOO-B-SA272-S103 BALLUFF-0366 BES516-324-G-EO-C-S49-01编码器BALLUFF-0367 BESM12MI-PSC40B-BV03编码器BALLUFF-0368 BESM12MI-PSC20B-S04GBALLUFF-0369 BESIKOA-120.38-G-S4BALLUFF-0370 BKS-B20-4(带3米线)BALLUFF-0371 BESM18MG1-PSC12B-S04G BALLUFF-0372 KFH090-E 0.9MBAR-10MBAR BALLUFF-0373 BTL5-E10-M2500-B-S32BALLUFF-0374 BNS819-B02-D08-46-3B传感器BALLUFF-0375 BTL5-E10/M0175/B/S32编码器BALLUFF-0376 BTL2-GS10-0250-ABALLUFF-0377 BKS-S10-3BALLUFF-0378 BMF305K-PS-C-2-S49-200MA 24VDC BALLUFF-0379 BES516-133-MO-C-PU-05*552069 BALLUFF-0380 BES516-347-MO-C-PU-5*030530112 BALLUFF-0381 BKS-S137-19-PC-05插头BALLUFF-0382 BKS-S137-19-PC-10插头BALLUFF-0383 BKS-S151-19-PC-05插头BALLUFF-0384 BKS-S151-19-PC-10插头BALLUFF-0385 BRGB3-WAB12-EP-P-R-K-SA8-0.3 BALLUFF-0386 BNS819-B02-D12-61-12-3B BALLUFF-0387 BF307X-PS-C-2S49BALLUFF-0388 BES516-300-S149-S4-D BALLUFF-0389 BES113 356 SAH-D11 BALLUFF-0390 BES516-357-BO-CBALLUFF-0392 BES M08MHI-PSC20B-S04G BALLUFF-0393 BTL5-E10-M1700-P-S32 BALLUFF-0394 BES516-105-SA5BALLUFF-0395 BESM18M1-PSC50B-S04K BALLUFF-0396 BESM18M1-PSC80B-S04K BALLUFF-0397 BES516-300-S190-S4 9602 BALLUFF-0398 BES516-360-SA9-PU03BALLUFF-0399 BES516-371-SA10-S4-003 BALLUFF-0400 BES516-346 HO-Y光电开关BALLUFF-0401 BES18.0-KB-4-FBALLUFF-0402 BES12.0-KB-4-FBALLUFF-0403 TL5-A11-M0350-P-S32BALLUFF-0406 TLH500 50千欧BALLUFF-0407 21K6GN-SWMG TI00 5千欧BALLUFF-0408 BES516-300-S295-2.875-S5 BALLUFF-0409 C05-AE4-00-VY-150F连接电缆BALLUFF-0410 BOS 18M-PS-1XA-E5-C-F4 BALLUFF-0411 BES516-3005-G-E4-C-PV-05 BALLUFF-0412 BES516-324-E0-C-03 BALLUFF-0413 BNS819-B02-R12-61-12-10 BALLUFF-0414 BNL5307-120-02-1000 BALLUFF-0415 BNN520-VA-10BALLUFF-0416 BNL5307-120-03-1000 BALLUFF-0417 BRGD2-WFD08-OP-RP-SA12-K-02 BALLUFF-0418 BNS813-B06-L12-61-A-22-06 BALLUFF-0419 BNS813-B04-L12-61-A-22-04 BALLUFF-0420 FSM12M1 NSC40B-S04 BALLUFF-0421 BKS-B20-1-03BALLUFF-0422 BES516-300-S246-S4-D接近开关BALLUFF-0423 BESM08H1-PSC15B-S04G接近开关BALLUFF-0424 BTL5-A-EH0BALLUFF-0425 BTM-A1-102BALLUFF-0426 BES516-300-S135-D-PU-05 BALLUFF-0427 BES517-139-M5-HS4BALLUFF-0428 BTL5-E10-M2130-B-S32 BALLUFF-0429 BKS-S32M-05BALLUFF-0430 BES516-300-S162-S4-D BALLUFF-0431 BES516-300-S265-S4-D BALLUFF-0432 BKS-S19-1-020BALLUFF-0433 BES 516-324-E0-C-S 49-PU-01 BALLUFF-0434 BES M18MI-PSC50B-S04G BALLUFF-0435 BES M12EL-POC4OB-S04G BALLUFF-0436 BES M12MI-PSC40B-S04G BALLUFF-0437 BTL5-E10-M0125-K-KA05 BALLUFF-0438 BTL5-E10-M0125-K-SR32 BALLUFF-0439 BLT5-A11-M1600-P-S32 BALLUFF-0440 BLT5-A11-M1000-P-S32 BALLUFF-0441 BLT5-P-5500-2BALLUFF-0442 BNS819-D02-D12-62-10BALLUFF-0443 BES516-211-E5-E-S27 BALLUFF-0444 BKS-S32M-15BALLUFF-0445 BTL5-E10-M1070-P-S-32 BALLUFF-0446 BKS-S32M-02BALLUFF-0447 BTL2-GS10-0075-ABALLUFF-0448 BES516-324-G-E5-C-S49 BALLUFF-0449 BNS819-D03-D12-100-10BALLUFF-0450 BESM12ML-PSC20B-BV00 BALLUFF-0451 BES-MO8MG1-PSC60F-S04G BALLUFF-0452 BKS-S103-CP-02BALLUFF-0453 BKA-S103/GS103-CP-02 BALLUFF-0454 BKA-S103-/GS103-CP-05 BALLUFF-0455 BKS-S105-R01BALLUFF-0456 BKS-S48-CP-02BALLUFF-0457 BES516-324-EO-C-S49-01编码器BALLUFF-0458 BES M12IL-POC40B-S04G BALLUFF-0459 BES516-347-MO-C-03 BALLUFF-0460 BTL5-T110-MO650-B-SA272-S103 BALLUFF-0461 BTL5-E10-M0125-K-SR32 BALLUFF-0462 BTL-P-1013-4RBALLUFF-0463 BTL5-H114-M0250-B-SA272-S94 BALLUFF-0464 SX-12-025-HP-12.5BALLUFF-0465 BTA-A11-065-EBALLUFF-0467 BTL5-A21-M2970-B-S32BALLUFF-0468 BTL5-E10-M0125-B-KA10 BALLUFF-0469 BTL5-E10-M0560-PS32BALLUFF-0470 BESM08MI-PSC20B-BP05接近开关BALLUFF-0471 BESM12MI-PSC40B-S04G带插头BALLUFF-0472 BKS-S40-1-03BALLUFF-0473 BOS08M-PS-RD10-S49光电开关BALLUFF-0474 BOS30M-PU-1PH-SA3-C光电开关BALLUFF-0475 BES516-324-E4-PU-03接近开关BALLUFF-0476 BES516-326-G-S4-C 10-30V BALLUFF-0477 BES516-329-S4-CBALLUFF-0478 BES516-300-S135-D-PU-10 BALLUFF-0479 BTLS-E10-M0660-B-KA10 BALLUFF-0480 BTL5-E10-M0275-K-SR32 BALLUFF-0481 BTL5-S171-M0300-B-S32 BALLUFF-0482 BKS-S-33M-00BALLUFF-0483 BES516-325-S4-C03BALLUFF-0484 BKS-S33M-05BALLUFF-0485 BES516-325-G-S4-CBALLUFF-0486 BIS C-6002-019-650-03-ST11 BALLUFF-0487 BES516-300-S166-S49BALLUFF-0488 BES516-300-S295/1.025-S4 BALLUFF-0489 BES516-200-S2-/1.500-S21 BALLUFF-0490 BES516-300-S308-S4DBALLUFF-0491 BTL5-T110-M0800-B-S103 BALLUFF-0492 BTL5-H114-M0250-B-S94 BALLUFF-0493 BNS813-B03-R12-61-A-20-01 BALLUFF-0494 BTL5-C10-M0100-B-S32BALLUFF-0496 BIW1-A310-M0075-P1-S115 BALLUFF-0497 BIW1-A310-M0150-P1-S115 BALLUFF-0498 BIW1-A310-M0225-P1-S115 BALLUFF-0499 BIW1-A310-M0400-P1-S115 BALLUFF-0500 BIW1-A310-M0500-P1-S115 BALLUFF-0501 BIW1-A310-M0700-P1-S115 BALLUFF-0502 BES516-325-E5-Y-S4BALLUFF-0503 1-800-543-8390BKS-SI9-03-5 BALLUFF-0504 BIW1-A310-M0650-P1-S115 BALLUFF-0505 BIW-A-WF01-M-43BALLUFF-0506 BKS-S115-PU-20BALLUFF-0507 BES516-114-SA1BALLUFF-0508 BES-516-324-E5-C-24BALLUFF-0509 BTL2-E10-0275-B-S-32 BALLUFF-0510 BTL2-E10-0200-B-S-32 BALLUFF-0511 BTL-T110-M0550-B-S103 BALLUFF-0512 BKS-S103/GS103-CPBALLUFF-0513 BKS-S-48-15-CPBALLUFF-0514 BTL5-T110-M0700-B-S103 BALLUFF-0515 BTL5-T110-M0200-P-S103 BALLUFF-0516 BES 516-300-S 135-S4-D BALLUFF-0517 0714DEBALLUFF-0518 BTL5-S172-M0700-B-KA05 BALLUFF-0519 BES-516-360-G-S4-H BALLUFF-0520 BIW1-A310-M0200-P1-S115 BALLUFF-0521 BIW1-A310-M0300-P1-S115 BALLUFF-0522 BIW1-A310-M0250-P1-S115 BALLUFF-0523 BTL5-E10-M0750-K-SR32 BALLUFF-0524 BNS113-B02-D12-61-A-13-0836 BALLUFF-0525 编码器插头 8针接头 2M电缆BALLUFF-0526 BKS-S20-5- 1米(弯插头,带灯BALLUFF-0527 BKS-S19-4-PU-1米(直插头,带灯BALLUFF-0528 BCS030-P0-1-C-03BALLUFF-0529 BES-M12ML-PSC80B-BV03 BALLUFF-0530 BES-M08ML-PSC80B-BV03 BALLUFF-0531 BTL5-S177-M0155-SR32 BALLUFF-0532 BES517-223-M4-E 20-250VAC BALLUFF-0533 BTL5-S174-M0450-B-S32 BALLUFF-0534 D7*******HUBALLUFF-0535 BOS25K-5-B3-P-S4BALLUFF-0536 BOS18M-PA-1PD-E5-S4BALLUFF-0537 BTL5-E10-M0800-P-S-32 BALLUFF-0538 BTL5-E17-M0500-B-KA05BALLUFF-0540 122727 0638 HU DC24V BALLUFF-0541 BTL5-E10-M3550-B-S32 BALLUFF-0542 BTL5-A11-MO/75-P-532 BALLUFF-0543 BES516-324-S4-CBALLUFF-0544 BNS819-B02-D16-61-30-10 BALLUFF-0545 GNC-1-0330-U-02E3/A11 BALLUFF-0546 BCS030PS1CS4BALLUFF-0547 BCS030P01CS5BALLUFF-0548 BES-516-300-S166-S49 BALLUFF-0549 BTL2-GS10-1300-ABALLUFF-0550 BTL5-S103-M1750-P-S32 BALLUFF-0551 BNS819-B05-R12BALLUFF-0552 BTL5-E10-M0800-B-S32 BALLUFF-0553 BTL5-E10-M0650-B-S32 BALLUFF-0554 BTL5-E10-M0550-B-S32 BALLUFF-0555 BTL5-E10-M0350-B-S32 BALLUFF-0556 BTL5-E10-M0340-B-S32 BALLUFF-0557 BTL5-E10-M0175-B-KA05 BALLUFF-0558 BTL5-E10-M0102-P-S32 BALLUFF-0559 BES517-223-M3-EBALLUFF-0560 BKS-S 32M-00BALLUFF-0561 BKS-S 32M-10(尾线要求:10米) BALLUFF-0562 BKS-S 19-4-PU-05BALLUFF-0563 BKS-S 20-1-03BALLUFF-0564 BOS18KF-PA-1PE-S4-C BALLUFF-0565 BTL5-T110-M0700-B-SA272-S103 BALLUFF-0566 BKS-19BALLUFF-0567 BKS-20BALLUFF-0568 BKS B19BALLUFF-0569 BKS B20BALLUFF-0570 BKS-S109-RT04 公插头M12*1 BALLUFF-0571 BKS-S82-00公插头M8*1 BALLUFF-0572 BES516-325-G-S4-CBALLUFF-0573 BISC-6002-019-650-03-ST11 BALLUFF-0574 MSDL1-SFB10.0-33381 BALLUFF-0575 MSBL-1SFB10.0-4733537 BALLUFF-0576 BKS-S 48-15-CP-5BALLUFF-0577 BKS-S 105-R01BALLUFF-0578 BKS-S 103-5BALLUFF-0579 BKS-S105-5BALLUFF-0580 BES 516-362-G-S4-H BALLUFF-0581 BTL5-S164-M0300-B-S32带附件BALLUFF-0582 BTL5-S164-M0340-P-S32带附件BALLUFF-0583 BTL5-S164-M1010-P-S32带附件BALLUFF-0584 BTL5-S164-M0740-P-S32带附件BALLUFF-0585 BKS-S32M+BTL-P-1013-4R BALLUFF-0586 BKS-S32M+BTL5-M-2814-1S BALLUFF-0587 BES516-355-E3R-0611 BALLUFF-0588 BRGB2-WDB12EP-P-L-K-01 BALLUFF-0589 BOS18M-PA-LD10-S4 BALLUFF-0590 BRGB3-WAB12-EP-P-R-K-0.3 BALLUFF-0591 BNS819-100-R-11BALLUFF-0592 BES516-300-S135-S4-D BALLUFF-0593 BES516-326-4S-CBALLUFF-0594 BES M12MI-PSH80B-S04G BALLUFF-0595 UB500-30GM-5E-V15BALLUFF-0596 UB500-30GM-IUR2-V15BALLUFF-0597 BES516-211-E6-EBALLUFF-0598 BES516-114-SA1-05BALLUFF-0599 BES516-3007-E2-X-015 BALLUFF-0600 BCS030-PO-1-YBALLUFF-0601 BTL5-E17-M0450-P-S32 BALLUFF-0602 BES516-341-H2-YBALLUFF-0603 BTL5-G21-M0305-P-S32 BALLUFF-0604 BTL5-P-5500-2BALLUFF-0605 BKS-S20-4-PU-10BALLUFF-0606 BTL5E10M0225BKA05BALLUFF-0607 BKS-S20-4-PU-05BALLUFF-0608 BAWR03KC-UAE40B-BP00 3-GS49 BALLUFF-0609 BTL5-A11-M0305-P-S32/US BALLUFF-0610 BTL5-S102-M0305-P-S32 BALLUFF-0611 BTL5-Q5221-M0305-P-KA10 BALLUFF-0612 BTL5-F-2814-1SBALLUFF-0613 BTLP-M5-VZBALLUFF-0614 BES516-214-E4-E-04/两芯/24V BALLUFF-0615 BES516-207-BO-E-PU-03 BALLUFF-0616 BOD3268745BALLUFF-0617 BES516-327-G-S4-HBALLUFF-0618 BESM30MG1-PSC40F-S04G/分体/ BALLUFF-0619 BES 516-3005BALLUFF-0620 BES 516-324-SA26-03BALLUFF-0621 BTM-E1-101BALLUFF-0622 BES515-325-SA61-S4-T BALLUFF-0623 BES516-325E5-C-S4接近开关BALLUFF-0624 BOS6K-PU-1QC-C75-CBALLUFF-0625 BKS-S103/GS103-CP-05 BALLUFF-0626 BES M18ME1-PSC20F-S04GSn=20mmBALLUFF-0627 BIS S-301-S115 读写头BALLUFF-0628 BKS-B 19-3-05BALLUFF-0629 BTL5-P1-M1000-P-S32 BALLUFF-0630 BTL5-E10-M0150-B-S32 BALLUFF-0631 BTL5-S117-B-M-150-B-KA10 BALLUFF-0632 BTL5-E10-M1200-P-KA10 BALLUFF-0633 BTL2-GS10-150-A磁环连接杆BALLUFF-0634 BTL5-E10-M550-B-KA05 BALLUFF-0635 BKS-S20-3-PU03BALLUFF-0636 BES-M08MI-PSC40B-S49G BALLUFF-0637 BKS-W20-3-05BALLUFF-0638 RFTA-1805-PU-02 0546JP BALLUFF-0639 PETA-1805P-002 0634JP BALLUFF-0640 RFTA-1805-PU-02BALLUFF-0641 RFEA-1805P-02BALLUFF-0642 BTL5-S172-M1225-B-KA15 BALLUFF-0643 BTL5-S172-M1025-B-KA15 BALLUFF-0644 BTL5-S172-M0885-B-KA15 BALLUFF-0645 BTL5-S176-M0380-B-KA15 BALLUFF-0646 BTL5-S173-M0700-B-KA16 BALLUFF-0647 BTL5-S175-M1805-B-KA15 BALLUFF-0648 BTL5-S174-M0270-B-KA15 BALLUFF-0649 BTL5-S175-M0560-B-KA15 BALLUFF-0650 BES516-326-G-BO-C-PU-10 BALLUFF-0651 BES516-327-G-BO-C-PU-15 BALLUFF-0652 M12M1-PSC40B-S04G BALLUFF-0653 BES516-325-D0-Z-PU。