四旋翼微型飞行器设计 - 红桃K
- 格式:pdf
- 大小:222.64 KB
- 文档页数:4
微型探测安防智能四轴飞行器的设计作者:王晨懿来源:《科技资讯》2015年第33期摘要:四轴飞行器是一类旋翼式飞行器,已在多种领域内得到广泛应用。
但现有的四周飞行器不能进行有效地自动避障,难以面对复杂多变的危险环境。
该文结合红外反射式传感器,设计了一种可自动避障的微型四轴飞行器,对其基本运动进行了分析,并确定了一种对姿态测量的算法,为进一步研究打下良好的基础。
关键词:探测安防智能四轴飞行器中图分类号:TP242.6 文献标识码:A 文章编号:1672-3791(2015)11(c)-0102-02四轴飞行器是一类旋翼式飞行器,拥有4个相同结构螺旋桨,共同为飞行器提供动力。
它具有结构简单、成本低廉、飞行稳定等特点,且技术成熟,已在多种领域内得到广泛应用。
四轴飞行器可以轻松地前往危险区域进行探测,不仅节省人力资源,更提高了安全效率。
但现有的多数四轴飞行器不能进行有效地自动避障,难以面对复杂多变的危险环境。
1 结构设计主要组成部分包括机身、螺旋桨、电机、控制中心和应用模块。
机身是电机和控制中心的承载平台,也起到保证电机之间相对位置的作用。
该微型四轴飞行器机身采取“X”型,即,为节省研究成本,原型机机身选择泡沫塑料板。
实际成品则可采用铝合金。
螺旋桨包括两对正反桨叶,与电机一起固定在机身各轴的末端,且螺旋桨叶平面与机身十字轴平行。
参考同量级的四轴飞行器,该微型四轴飞行器的螺旋桨长度选择为55 mm[1]。
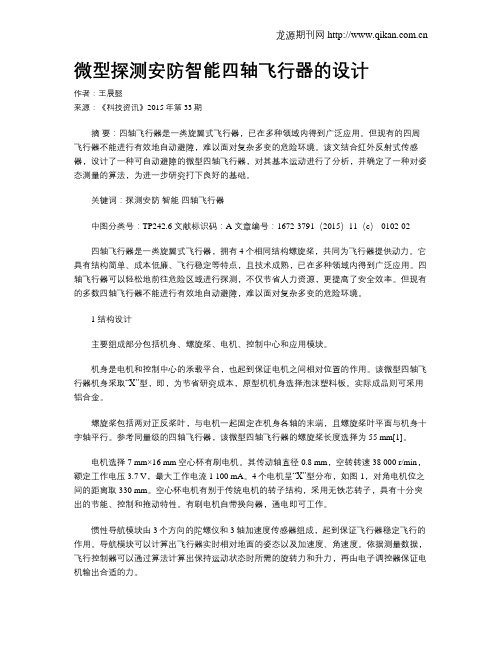
电机选择7 mm×16 mm 空心杯有刷电机。
其传动轴直径0.8 mm,空转转速38 000 r/min,额定工作电压3.7 V,最大工作电流1 100 mA。
4个电机呈“X”型分布,如图1,对角电机位之间的距离取330 mm。
空心杯电机有别于传统电机的转子结构,采用无铁芯转子,具有十分突出的节能、控制和拖动特性。
有刷电机自带换向器,通电即可工作。
惯性导航模块由3个方向的陀螺仪和3轴加速度传感器组成,起到保证飞行器稳定飞行的作用。

无人飞行器应用概述及四旋翼遥控飞行器的制作2016年04月26日序————遥控飞机是一种由无线电遥控设备以及地面程序控制装置操纵的无人驾驶飞行器。
从技术角度定义可以分为:无人直升机、无人固定翼机、无人多旋翼飞行器、无人飞艇、无人伞翼机等。
自二十世纪初,全球无人机技术的普及将无人飞行器的应用推广开来,现已形成了军用,民用等多个不同体系,通过搭载不同的机载设备,无人飞行器可以具备多种实用性功能。
随着无人飞行器技术的发展而逐渐形成的自动化、模块化、可持续航行等诸多技术标准已经使得无人飞行器的制作与使用变得更为简单,高效。
本次设计为四旋翼于无人遥控飞行器的制作与开发,运用所学电子工艺技术以及电路知识,完成对飞行器的基本电路设计,实现无人飞行器基本功能。
无人飞行器的构成包括飞行平台,动力装置,导航飞控系统,电气系统,任务设备,显示系统,操纵系统,机载设备,地面控制装置等。
无人飞行器设计,以无人飞行器基本构成思想为指导,在保证基本组件及基本模块正确使用的前提下,对飞行器相关结构进行简化,减小飞行器体积,减轻飞行器质量,在提高飞行器易操作性及灵活性的同时,也无形中延长了飞行器的空中续航时间,使得飞行器的高空能力得到进一步提升。
本次设计着重阐述无人飞行器设计以及制作关键步骤,通过对制作过程的细致阐释,对纯手工制作无人飞行器进行关键性的、系统的、细致的的描述。
无人飞行器的概念及用途无人机所以会受到如此重视, 其原因是自身所拥有的独特优势, 现代科技的发展使得防空武器的性能日益提升, 这无疑大大增加了有人机在空战中的风险程度, 而无人机则适应了现代战争对减少乃至避免人员伤亡的要求。
再则, 从研制、使用和维护成本看, 相当于有人机而言, 无人机的研制、使用和维护成本要低廉得多。
更何况, 无人机因其自身的优越性能, 可以在超低空和超高空长时间盘旋, 较之有人机其活动空间和范围更为广阔。
有鉴于此, 研制和发展无人机成为各国军方尤其是发达国家军方的重要选择。

全球最小四轴飞行器Crazyflie电路部分详解上网日期: 2016年02月16日Crazyflie是目前全世界最小的四轴飞行器,仅重19克,相对的两翼之间长度为9厘米。
有两个不同的版本,区别在于传感器的数量。
这个小四轴飞行器可以在空中飞行长达7分钟,通过一个标准的USB接头给锂聚合物电池充电需要约20分钟。
它的电路部分到底是如何实现的?且听我慢慢道来。
1. 电气原理从中心开始:72M主频的M3内核的处理器来处理各传感器数据,并对四个旋翼进行控制达到想要的效果。
往上:通过IIC接口与三轴陀螺仪、三轴加速度计(也就是MPU6050)、磁力计、气压计等传感器连接获取传感器数据,来感知载体(也就是四轴机体)的姿态(这里的姿态包括俯仰、横滚、航向)和高程。
往下:通过PWM调节四个电机驱动器来驱动四个电机转动,由于电机带有螺旋桨转动而产生所谓的“升力”。
往右:通过SPI协议接口与无线芯片通讯,回传载体数据和接收控制信号,还有外部扩展接口。
往左:电源管理部分。
2. 电池电池使用的是锂电池(锂离子聚合物电池),是目前流行的遥控模型电池。
但锂电池必须按照规定使用,过冲、过放都会产生安全隐患。
由于它具有最高的电能/质量比和最大的放电电流,所以也是比较适合的选择。
为了应付锂电池的这些缺点,我们使用电路保护模块(PCM)来防止电量不足、过放电或者短路。
PCM 位于电池上部的橙色胶带下面,从中引出两条电源线。
但是这种保护是远远不够的,还需要有专门的充放电管理电路来保护。
比如电气原理图的Power Mangment and Charging部分。
PCM 的参数如下:3. 电源管理电源管理主要是由TI BQ24075 电源管理芯片来完成。
它能开/关和给锂电池充电。
BQ24075有三种输入限制模式,100mA,500mA和用户自定义(Crazyflie设置740mA)。
当将Crazyflie 接上普通电源适配器时就可以使它能快速的充电。

四旋翼无人机设计四旋翼无人机(Quadcopter)是一种由四个电动马达驱动的无人机,通过分别控制每个马达的转速和方向来实现悬停、飞行和转弯等动作。
四旋翼无人机在农业、电力巡检、安防监控以及航拍等领域有着广泛的应用。
下面将详细介绍四旋翼无人机的设计要点和主要部件。
在结构设计方面,四旋翼无人机的主要部件包括机架、电机、螺旋桨、电调和飞控。
机架通常采用轻质材料(如碳纤维)制成,具有重量轻、刚性强和抗冲击能力好的特点。
电机负责驱动螺旋桨旋转,通常使用无刷电机,其转速和电流特性需要与电调相匹配。
螺旋桨是产生升力的关键部件,选择合适长度和材质的螺旋桨可以提高飞行效率和稳定性。
电调则负责控制电机的转速和方向,将飞控发送的控制信号转化为电机的控制信号。
飞行控制系统设计则是四旋翼无人机最核心的部分。
飞控是指通过传感器、信号处理芯片和控制算法等组成的电子设备,用于检测和响应无人机的姿态、位置和运动状态。
常见的飞控系统有飞行控制器(Flight Controller)和惯性测量单元(Inertial Measurement Unit,简称IMU)。
飞行控制器是无人机的“大脑”,负责接收遥控器、GPS和其他传感器的信号,并发送控制指令给电机和电调。
IMU包括加速度计和陀螺仪,用于测量无人机的加速度和角速度,从而实现对姿态和运动的控制。
载荷系统设计根据应用需求而定,可以包括相机、传感器和机械臂等。
载荷系统需要与飞行控制系统进行数据交互,并能够通过控制指令实现相应的操作。
总之,四旋翼无人机的设计需要考虑结构、电力、飞行控制和载荷系统等多个方面。
合理选择和设计各个部件,同时优化飞行控制算法和传感器配置,可以提高无人机的性能和稳定性,实现更多的功能和应用。
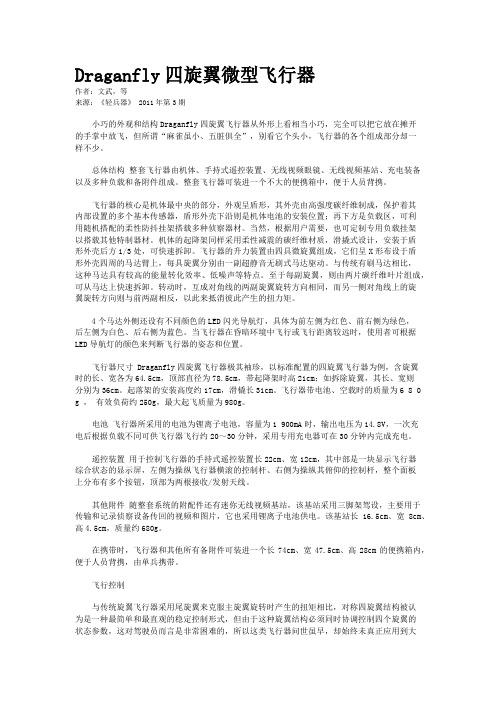
Draganfly四旋翼微型飞行器作者:文武,等来源:《轻兵器》 2011年第3期小巧的外观和结构Draganfly四旋翼飞行器从外形上看相当小巧,完全可以把它放在摊开的手掌中放飞,但所谓“麻雀虽小、五脏俱全”,别看它个头小,飞行器的各个组成部分却一样不少。
总体结构整套飞行器由机体、手持式遥控装置、无线视频眼镜、无线视频基站、充电装备以及多种负载和备附件组成。
整套飞行器可装进一个不大的便携箱中,便于人员背携。
飞行器的核心是机体最中央的部分,外观呈盾形,其外壳由高强度碳纤维制成,保护着其内部设置的多个基本传感器,盾形外壳下沿则是机体电池的安装位置;再下方是负载区,可利用随机搭配的柔性防抖挂架搭载多种侦察器材。
当然,根据用户需要,也可定制专用负载挂架以搭载其他特制器材。
机体的起降架同样采用柔性减震的碳纤维材质,滑撬式设计,安装于盾形外壳后方1/3处,可快速拆卸。
飞行器的升力装置由四具微旋翼组成,它们呈X形布设于盾形外壳四周的马达臂上,每具旋翼分别由一副超静音无刷式马达驱动。
与传统有刷马达相比,这种马达具有较高的能量转化效率、低噪声等特点。
至于每副旋翼,则由两片碳纤维叶片组成,可从马达上快速拆卸。
转动时,互成对角线的两副旋翼旋转方向相同,而另一侧对角线上的旋翼旋转方向则与前两副相反,以此来抵消彼此产生的扭力矩。
4个马达外侧还设有不同颜色的LED闪光导航灯,具体为前左侧为红色、前右侧为绿色,后左侧为白色、后右侧为蓝色。
当飞行器在昏暗环境中飞行或飞行距离较远时,使用者可根据LED导航灯的颜色来判断飞行器的姿态和位置。
飞行器尺寸 Draganfly四旋翼飞行器极其袖珍,以标准配置的四旋翼飞行器为例,含旋翼时的长、宽各为64.5cm,顶部直径为78.5cm,带起降架时高21cm;如拆除旋翼,其长、宽则分别为36cm。
起落架的安装高度约17cm,滑橇长31cm。
飞行器带电池、空载时的质量为6 8 0 g ,有效负荷约250g,最大起飞质量为980g。
小型攻击型四旋翼无人机系统设计分析一、引言无人机技术的飞速发展,使得四旋翼无人机成为了军事领域的重要装备之一、小型攻击型四旋翼无人机以其低成本、高机动性和灵活性得到了广泛的关注和应用。
本文将对小型攻击型四旋翼无人机的系统设计进行分析。
二、系统组成1.机身结构:小型攻击型四旋翼无人机的机身结构应该具备轻巧、坚固和耐用的特点,能够承受高强度的运动和突发力的冲击。
同时,机身应具备良好的气动性能,以提高飞行效率和稳定性。
2.动力系统:动力系统是小型攻击型四旋翼无人机的核心组成部分,通常采用电动驱动的无刷直流电机作为动力源。
电机通过旋转螺旋桨产生升力,控制螺旋桨的转速和旋转方向可以实现飞行、悬停和转弯等动作。
3.控制系统:控制系统是小型攻击型四旋翼无人机的“大脑”,负责控制飞行、导航和任务执行等功能。
通常包括姿态控制、位置控制、导航控制和飞行控制等模块。
姿态控制使用陀螺仪、加速度计和磁力计等传感器来感知机身的姿态变化,然后通过电调控制电机的转速来实现平衡。
位置控制使用GPS、激光雷达和视觉传感器等感知器件来获取位置信息,然后通过PID控制算法控制飞行方向和速度。
4.任务载荷系统:小型攻击型四旋翼无人机通常搭载各种任务载荷,如摄像机、传感器、弹药等。
摄像机可以在任务中提供实时监视和情报收集功能,传感器可以用于目标侦测和测距等功能,弹药可以进行攻击和破坏敌方目标。
5.通信系统:通信系统是小型攻击型四旋翼无人机与地面站或其他系统进行通信的关键环节。
通常使用无线电通信技术,如Wi-Fi、蓝牙和卫星通信等来实现数据传输和控制指令的交互。
同时,通信系统还应该具备一定的抗干扰和保密性能,以防止被敌方干扰和攻击。
三、系统设计优化1.重量优化:小型攻击型四旋翼无人机需要具备较高的机动性和机载载荷能力,但受限于自身重量的限制。
因此,在设计中应该尽量减少机身结构和各组件的重量,采用轻量化的材料和结构设计来提高整体性能。
2.能量效率优化:小型攻击型四旋翼无人机的电池容量有限,为了延长续航时间,应该通过优化动力系统和降低飞行的功耗来提高能量效率。
浅谈微型航拍⽆⼈机(旋翼)的基本结构原理简要介绍微型航拍⽆⼈机的结构形式与⼯作原理两⽅⾯的内容。
微型航拍⽆⼈机(旋翼)的结构形式微型航拍⽆⼈机的四个旋翼分布在机体的前、后、左、右。
为了达到机体稳定飞⾏的⽬的,四个旋翼在结构上保持⽔平⼀致,四个旋翼的⼤⼩、造型都⼀样,四个由微控器(MCU)控制的电机对称分布在飞⾏器的⽀架端,⽀架中部安装有飞⾏控制器(通常是微型⼯控板MCU,在这⾥可以使⽤经常提到的STM32嵌⼊式系统)和外部连接设备。
它的基本结构形式如下图所⽰。
微型航拍⽆⼈机(旋翼)的⼯作原理微型航拍⽆⼈机(旋翼)通过改变四个电机的转速来调整旋翼转速,达到⽆⼈机升⼒变化的需求,进⽽调节航拍⽆⼈机的运动形式。
微型航拍⽆⼈机(旋翼)是6⾃由度垂直升降系统,由对称分布的四个电机提供四个输⼊⼒,有六个飞⾏状态,属于⼀种⽋驱动系统的⼀种。
微型航拍⽆⼈机(旋翼)沿各个⾃由度的飞⾏状态如下图所⽰。
由上图可以看到,这种微型航拍⽆⼈机(旋翼)的电机 1、电机 3逆时针旋转,与此同时电机 2、电机 4顺时针旋转。
如果四个电机的转速相同,那么陀螺效应与空⽓动⼒扭矩效应相互抵消,使得⽆⼈机处于悬停状态。
由上图可知该⽆⼈机有6种飞⾏状态:(a)垂直运动;(b)俯仰运动;(c)滚转运动;(d)偏航运动;(e)前后运动;(f)侧向运动;下⾯简单分析⼀下⽆⼈机是如何实现这6种飞⾏状态的。
把电机分成1、3与2、4这两组,当两组电机的输出功率增⼤,且达到相同的输出,拉⼒增⼤,总拉⼒⼤于⽆⼈机重量时机体垂直上升;反之,垂直下降。
没有风的情况下⽆⼈机便维持悬停状态。
如果1、3组电机的输出功率⼩于2、4组,⽆⼈机由悬停状态变为⾃转状态,具体是沿逆时针⾃转。
原因也很简单,这两组电机产⽣相反的扭矩,电机输出不同的情况下,机体⾃然会发⽣旋转。
如果2、4组电机的输出保持不变,⽽1、3组电机,其中⼀个的输出功率变⼩,那么⽆⼈机会向输出功率变⼩的电机的⽅向俯冲。
小型四旋翼无人机组机方案(总11页)本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.March一、小型四旋翼无人机总体架构典型的小型四旋翼无人机,一般由机械部分(机架),动力部分(包括电机、电子调速器、电调连接板、桨叶、电池),电子部分(包括飞控板、通信模块、遥控器接收机、PPM编码板)组成。
(一)机械部分机架考虑到编队飞行对实验室空间的要求,希望机架能够尽量的小。
根据与蔡国伟老师对电机与桨叶(后文提到)的搭配进行讨论后,决定将机架的大小设定为轴距255mm,边距180mm(由6寸桨的大小决定)。
1,底板 2,中间机架板 3,顶板整个机体由底板、中间机架板、顶板连接而成(通过尼龙螺柱和螺丝);底板安置电池、xbee模块、遥控器接收机、电调连接板,中间机架板安置4个电调、pixhawk飞控板,顶板用于安置定位系统标记点(同时起到保护、隐藏pixhawk飞控板及走线的作用);为便于安装,所有开孔、镂空均根据拟选器件匹配设计;拟采用碳2mm厚3K纤维板加工。
另设计四个保护罩如下(可用于避免桨叶受损或伤人):4,保护罩(二)动力部分(1)电机一般而言,小型四旋翼无人机(轴距250mm左右)选用KV2000左右(配5-6寸桨)的电机。
经过对比讨论后,拟选用飓风D2206 KV1900无刷直流电机(配6寸桨)。
之所以选用这款电机是因为这款电机能够提供较大的拉力,同时该电机的工作电流处在一个比较小的区间,单个电机重量仅为。
飓风D2206 KV1900参数表飓风D2206 KV1900实物图(2)电子调速器电子调速器用于驱动无刷直流电机,比较重要的参数是工作电流,刷新频率,重量。
一般而言,市面上可售的大部分电子调速器的刷新频率都大于400hz,符合要求。
根据上文所选电机的工作电流,综合考虑重量要求,与蔡国伟老师沟通后,拟选用好盈XRotor-10A电子调速器。
大话多旋翼飞行器--动力学分析作者:红桃k四旋翼飞行器的结构与基本飞行原理四个旋翼的对称布局可以有两种形式,分别称为X 模式和十字模式。
实际应用中,这两种模式在性能上差别不大,但对于分析来说,十字模式更为简化和直观,因此本文以十字模式进行分析。
四旋翼微型飞行器的结构如图1所示。
机身是一个刚性的十字交叉结构,四个电机分别位于十字结构的末端,驱动四个旋翼转动进而产生升力。
四旋翼飞行器产生基本动作的原理为:电机1和3逆时针旋转驱动两个正桨(旋翼逆时针旋转产生升力则称为正桨,反之则为反桨)产生升力,电机2和4顺时针旋转驱动两个反桨产生升力。
反向旋转的两组电机和桨使其各自对机身产生的转矩相互抵消,保证四个电机转速一致时机身不发生自旋。
电机1转速减小(增大),同时电机3转速增大(减小),产生向前(后)方向的运动。
电机2转速减小(增大),同时电机4转速增大(减小),产生向左(右)方向的运动。
四个电机转速同时增大(减小)产生向上(向下)的运动。
对角线的电机一组转速增大,另一组转速减小产生自身旋转运动。
通过这几种动作的组合,即可实现多样的飞行。
图1 飞行器结构使用北-东-地坐标系作为导航坐标系,以W 表示。
其坐标轴x W 指向地球北,y W 指向地球东,z W 垂直于地球表面并指向下。
飞行器机体坐标系固连于飞行器的质心,以B 表示。
其坐标轴x B 平行于桨盘平面并指向前,y B 平行于桨盘平面并指向右,z B 垂直于桨盘平面并指向下。
mg 旋翼2旋翼1旋翼3旋翼4F 1F 2Q 1Q 2Q 3F 3Q 4F 4y Bz Bx Bx Wy Wz W旋翼动力学令单个旋翼绕其旋转轴的角速度为Ωi (i =1,2,3,4),电机转矩为τi ,与电机转矩相反的空气阻力矩为Q i 。
则有=+τΩ i r i iI Q (0-1)其中I r 为单个旋翼绕其旋转轴的转动惯量与电机转子转动惯量之和。
单个旋翼在自由流中的升力为2=Ωi i F b(0-2)其中,b 为一正比例常数,其值由空气密度,桨叶半径的立方,桨叶数量,桨叶弦长,升力常数(与桨叶攻角相关),阻力常数(与飞行器结构相关),以及几何尾迹决定。