DS18B20单片机数码管显示原理图和程序文件
- 格式:doc
- 大小:7.90 MB
- 文档页数:8
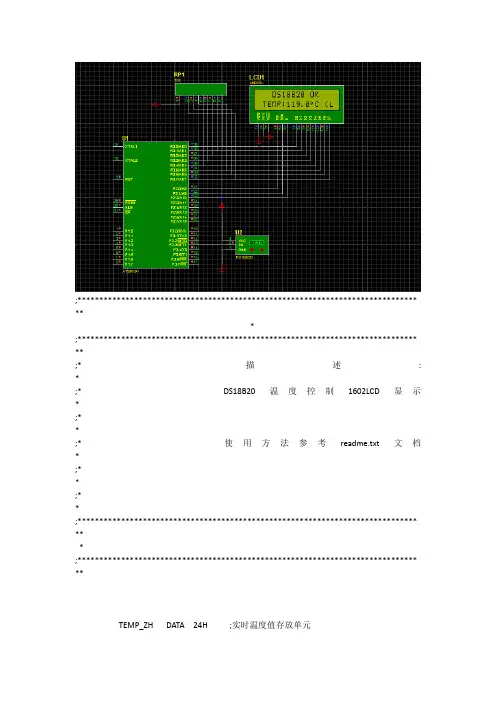
;****************************************************************************** ***;****************************************************************************** **;* 描述: *;* DS18B20温度控制1602LCD显示*;**;* 使用方法参考readme.txt文档*;**;**;****************************************************************************** ***;****************************************************************************** **TEMP_ZH DATA 24H ;实时温度值存放单元TEMPL DATA 25H ;TEMPH DATA 26H ;TEMP_TH DATA 27H ;高温报警值存放单元TEMP_TL DATA 28H ;低温报警值存放单元TEMPHC DATA 29H ;TEMPLC DATA 2AHK1 EQU P1.4K2 EQU P1.5K3 EQU P1.6K4 EQU P1.7BEEP EQU P3.7RELAY EQU P1.3LCD_X EQU 2FH ;LCD 地址变量LCD_RS EQU P2.0LCD_RW EQU P2.1LCD_EN EQU P2.2flag1 equ 20H.0 ;DS18B20是否存在标记KEY_UD EQU 20H.1 ;设定KEY 的UP与DOWN 标记date_line equ p3.3;=====================================================ORG 0000HJMP MAINORG 0030HMAIN: MOV SP,#60HMOV A,#00HMOV R0,#20H ;将20H-2FH 单元清零MOV R1,#10HCLEAR: MOV @R0,AINC R0DJNZ R1,CLEARCALL SET_LCDCALL RE_18B20start: CALL RESET ;18B20复位子程序JNB FLAG1,START1 ;DS1820不存在CALL MENU_OKCALL READ_E2CALL TEMP_BJ ;显示温度标记JMP START2START1: CALL MENU_ERRORCALL TEMP_BJ ;显示温度标记JMP $START2:CALL RESETJNB FLAG1,START1 ;DS1820不存在MOV A,#0CCH ; 跳过ROM匹配CALL WRITEMOV A,#44H ; 发出温度转换命令CALL WRITECALL RESETMOV A,#0CCH ; 跳过ROM匹配CALL WRITEMOV A,#0BEH ; 发出读温度命令CALL WRITECALL READcall CONVTEMPCall DISPBCDCALL CONVCALL TEMP_COMPCALL PROC_KEY ; 键扫描SJMP START2;-----------------------------------------------------PROC_KEY:JB K1,PROC_K1 ; 按键K1处理CALL BEEP_BLJNB K1,$MOV DPTR,#M_ALAX1MOV A,#1CALL LCD_PRINTCALL LOOK_ALARMJB K3,$CALL BEEP_BLJMP PROC_K2PROC_K1: ; 按键K2处理JB K2,PROC_ENDCALL BEEP_BLJNB K2,$MOV DPTR,#RESET_A1MOV A,#1CALL LCD_PRINTCALL SET_ALARMCALL RE_18B20 ;将设定的TH,TL值写入DS18B20内CALL WRITE_E2PROC_K2:CALL MENU_OKCALL TEMP_BJPROC_END:RET;============================================;设定报警值TH、TL;============================================SET_ALARM:;CALL RESET_ALARMCALL LOOK_ALARMAS0:JB K1,AS00CALL BEEP_BLJNB K1,$CPL 20H.1 ;UP/DOWN 标记AS00: JB 20H.1,ASZ01 ;20H.1=1,UPJMP ASJ01 ;20H.1=0,DOWNASZ01: JB K2,ASZ02 ;TH值调整(增加)CALL BEEP_BLINC TEMP_THMOV A,TEMP_THCJNE A,#120,ASZ011MOV TEMP_TH,#0ASZ011: CALL LOOK_ALARMMOV R5,#10CALL DELAYJMP ASZ01ASZ02: JB K3,ASZ03 ;TL值调整(增加)CALL BEEP_BLINC TEMP_TLMOV A,TEMP_TLCJNE A,#99,ASZ021MOV TEMP_TL,#00HASZ021: CALL LOOK_ALARM ;MOV R5,#10CALL DELAYJMP ASZ02ASZ03: JB K4,AS0 ;确定调整OKCALL BEEP_BLJNB K4,$RETASJ01:JB K2,ASJ02 ;TH值调整(减少)CALL BEEP_BLDEC TEMP_THMOV A,TEMP_THCJNE A,#0FFH,ASJ011JMP ASJ022ASJ011: CALL LOOK_ALARMMOV R5,#10CALL DELAYJMP AS0ASJ02: JB K3,ASJ03 ;TL值调整(减少)CALL BEEP_BLDEC TEMP_TLMOV A,TEMP_TLCJNE A,#0FFH,ASJ021JMP ASJ022ASJ021: CALL LOOK_ALARM ;MOV R5,#10CALL DELAYJMP AS0ASJ022: CPL 20H.1JMP ASZ01ASJ03: JMP ASZ03RETRESET_ALARM:MOV DPTR,#RESET_A1 ;指针指到显示信息区MOV A,#1 ;显示在第一行CALL LCD_PRINTRETRESET_A1:DB "RESET ALERT CODE";==================================================== ;实际温度值与标记温度值比较子程序;==================================================== TEMP_COMP:MOV A,TEMP_THSUBB A,TEMP_ZH ;减数>被减数,则JC CHULI1 ;借位标志位C=1,转MOV A,TEMP_ZHSUBB A,TEMP_TL ;减数>被减数,则JC CHULI2 ;借位标志位C=1,转MOV DPTR,#BJ5CALL TEMP_BJ3CLR RELAY ;继电器吸合RETCHULI1:MOV DPTR,#BJ3CALL TEMP_BJ3SETB RELAY ;继电器关闭CALL BEEP_BLRETCHULI2:MOV DPTR,#BJ4CALL TEMP_BJ3CALL BEEP_BLRET;-----------------------------------------TEMP_BJ3:MOV A,#0CEHCALL WCOMMOV R1,#0MOV R0,#2BBJJ3: MOV A,R1MOVC A,@A+DPTRCALL WDATAINC R1DJNZ R0,BBJJ3RETBJ3:DB ">H"BJ4:DB "<L"BJ5:DB " !";================================================== ;显示温度标记子程序;================================================== TEMP_BJ:MOV A,#0CBHCALL WCOMMOV DPTR,#BJ1 ;指针指到显示消息MOV R1,#0MOV R0,#2BBJJ1: MOV A,R1MOVC A,@A+DPTRCALL WDATAINC R1DJNZ R0,BBJJ1RETBJ1:DB 00H,"C";================================================= MENU_OK:MOV DPTR,#M_OK1 ;指针指到显示消息MOV A,#1 ;显示在第一行CALL LCD_PRINTMOV DPTR,#M_OK2 ;指针指到显示消息MOV A,#2 ;显示在第一行CALL LCD_PRINTRETM_OK1:DB " DS18B20 OK ",0M_OK2:DB " TEMP: ",0;-----------------------------------------------MENU_ERROR:MOV DPTR,#M_ERROR1 ;指针指到显示消息1MOV A,#1 ;显示在第一行CALL LCD_PRINTMOV DPTR,#M_ERROR2 ;指针指到显示消息1MOV A,#2 ;显示在第一行CALL LCD_PRINTRETM_ERROR1:DB " DS18B20 ERROR ",0M_ERROR2:DB " TEMP: ---- ",0;==================================================== reset: setb date_linenopclr date_linemov r0,#6bh ;主机发出延时复位低脉冲mov r1,#04htsr1: djnz r0,$mov r0,#6bhdjnz r1,tsr1setb date_line ;然后拉高数据线nopnopnopmov r0,#32htsr2: jnb date_line,tsr3 ;等待DS18B20回应djnz r0,tsr2jmp tsr4 ; 延时tsr3: setb flag1 ; 置标志位,表示DS1820存在jmp tsr5tsr4: clr flag1 ; 清标志位,表示DS1820不存在jmp tsr7tsr5: mov r0,#06bhtsr6: djnz r0,$ ; 时序要求延时一段时间tsr7: setb date_lineret;=======================================================RE_18B20:JB FLAG1,RE_18B20ARETRE_18B20A:CALL RESETMOV A,#0CCH ;跳过ROM匹配LCALL WRITEMOV A,#4EH ;写暂存寄存器LCALL WRITEMOV A,TEMP_TH ;TH(报警上限)LCALL WRITEMOV A,TEMP_TL ;TL(报警下限)LCALL WRITEMOV A,#7FH ;12位精确度LCALL WRITERET;------------------------------------------------------------WRITE_E2:CALL RESETMOV A,#0CCH ;跳过ROM匹配LCALL WRITEMOV A,#48H ;把暂存器里的温度报警值拷贝到EEROMLCALL WRITERET;--------------------------------------------------------------READ_E2:CALL RESETMOV A,#0CCH ;跳过ROM匹配LCALL WRITEMOV A,#0B8H ;把EEROM里的温度报警值拷贝回暂存器CALL WRITERET;--------------------------------------------------------------;将自定义字符写入LCD1602的CGRAM中;--------------------------------------------------------------STORE_DATA:MOV A,#40HCALL WCOMMOV R2,#08HMOV DPTR,#D_DATAMOV R3,#00HS_DATA:MOV A,R3MOVC A,@A+DPTRCALL WDATA ;写入数据INC R3DJNZ R2,S_DATARETD_DATA:DB 0CH,12H,12H,0CH,00H,00H,00H,00H;============================================================== write: mov r2,#8 ;一共8位数据CLR Cwr1:clr date_line ;开始写入DS18B20总线要处于复位(低)状态mov r3,#07djnz r3,$ ;总线复位保持16微妙以上rrc a ;把一个字节DATA 分成8个BIT环移给Cmov date_line,c ;写入一个BITmov r3,#3CHdjnz r3,$ ;等待100微妙setb date_line ;重新释放总线nopdjnz r2,wr1 ;写入下一个BITsetb date_lineret;--------------------------------------------------------------------read: mov r4,#4 ; 将温度低位、高位、TH、TL从DS18B20中读出mov r1,#TEMPL ; 存入25H、26H、27H、28Hre00: mov r2,#8re01: clr cysetb date_linenopnopclr date_line ;读前总线保持为低nopnopnopsetb date_line ;开始读总线释放mov r3,#09 ;延时18微妙djnz r3,$mov c,date_line ;从DS18B20总线读得一个BITmov r3,#3CHdjnz r3,$ ;等待100微妙rrc a ;把读得的位值环移给Adjnz r2,re01 ;读下一个BITmov @r1,ainc r1djnz r4,re00ret;*****************************************************; 处理温度BCD 码子程序;**************************************************** CONVTEMP: MOV A,TEMPH ;判温度是否零下ANL A,#80HJZ TEMPC1 ;温度零上转CLR CMOV A,TEMPL ;二进制数求补(双字节)CPL A ;取反加1ADD A,#01HMOV TEMPL,AMOV A,TEMPHCPL AADDC A,#00HMOV TEMPH,ASJMP TEMPC11TEMPC1: MOV TEMPHC,#0AH ;+TEMPC11: MOV A,TEMPHCSWAP AMOV TEMPHC,AMOV A,TEMPLANL A,#0FH ;乘0.0625MOV DPTR,#TEMPDOTTABMOVC A,@A+DPTRMOV TEMPLC,A ;TEMPLC LOW=小数部分BCDMOV A,TEMPL ;整数部分ANL A,#0F0H ;取出高四位SWAP AMOV TEMPL,AMOV A,TEMPH ;取出低四位ANL A,#0FHSWAP AORL A,TEMPL ;重新组合MOV TEMP_ZH,ALCALL HEX2BCD1MOV TEMPL,AANL A,#0F0HSWAP AORL A,TEMPHC ;TEMPHC LOW = 十位数BCDMOV TEMPHC,AMOV A,TEMPLANL A,#0FHSWAP A ;TEMPLC HI = 个位数BCDORL A,TEMPLCMOV TEMPLC,AMOV A,R4JZ TEMPC12ANL A,#0FHSWAP AMOV R4,AMOV A,TEMPHC ;TEMPHC HI = 百位数BCDANL A,#0FHORL A,R4MOV TEMPHC,ATEMPC12: RET;---------------------------------------------------------------HEX2BCD1:MOV B,#064H ;十六进制-> BCDDIV AB ;B= A % 100MOV R4,A ;R7 = 百位数MOV A,#0AHXCH A,BDIV AB ;B = A % BSWAP AORL A,BRET;-------------------------------------------------------------; 小数部分码表;------------------------------------------------------------- TEMPDOTTAB:DB 00H,00H,01H,01H,02H,03H,03H,04HDB 05H,05H,06H,06H,07H,08H,08H,09H;===================================================== LOOK_ALARM:MOV DPTR,#M_ALAX2 ;指针指到显示信息区MOV A,#2 ;显示在第二行CALL LCD_PRINTMOV A,#0C6HCALL TEMP_BJ1MOV A,TEMP_TH ;加载TH数据MOV LCD_X,#3 ;设置位置CALL SHOW_DIG2H ;显示数据MOV A,#0CEHCALL TEMP_BJ1MOV A,TEMP_TL ;加载TL数据MOV LCD_X,#12 ;设置位置CALL SHOW_DIG2L ;显示数据RET;--------------------------------------------M_ALAX1:DB " LOOK ALERT CODE",0M_ALAX2:DB "TH: TL: ",0;--------------------------------------------TEMP_BJ1:CALL WCOMMOV DPTR,#BJ2 ;指针指到显示信息区MOV R1,#0MOV R0,#2BBJJ2: MOV A,R1MOVC A,@A+DPTRCALL WDATAINC R1DJNZ R0,BBJJ2RETBJ2:DB 00H,"C";---------------------------------------------------SHOW_DIG2H: ;在LCD 的第二行显示数字MOV B,#100DIV ABADD A,#30HPUSH BMOV B,LCD_XCALL LCDP2POP BMOV A,#0AHXCH A,BDIV ABADD A,#30HINC LCD_XPUSH BMOV B,LCD_XCALL LCDP2POP BINC LCD_XMOV A,BMOV B,LCD_XADD A,#30HCALL LCDP2RETSHOW_DIG2L: ;在LCD 的第二行显示数字MOV B,#100DIV ABMOV A,#0AHXCH A,BDIV ABADD A,#30HPUSH BMOV B,LCD_XCALL LCDP2POP BINC LCD_XMOV A,BMOV B,LCD_XADD A,#30HCALL LCDP2RET;-------------------------------------------------------------;显示区BCD 码温度值刷新子程序;-------------------------------------------------------------DISPBCD:MOV A,TEMPLCANL A,#0FHMOV 70H,A ;小数位MOV A,TEMPLCSWAP AANL A,#0FHMOV 71H,A ;个位MOV A,TEMPHCANL A,#0FHMOV 72H,A ;十位MOV A,TEMPHCSWAP AANL A,#0FHMOV 73H,A ;百位MOV A,TEMPHCANL A,#0F0HCJNE A,#010H,DISPBCD0SJMP DISPBCD2DISPBCD0: MOV A,TEMPHCANL A,#0FHJNZ DISPBCD2 ;十位数是0MOV A,TEMPHCSWAP AANL A,#0FHMOV 73H,#0AH ;符号位不显示MOV 72H,A ;十位数显示符号DISPBCD2: RET;========================================================== ; LCD 1602 显示子程序;========================================================== CONV:MOV A,73H ;加载百位数据MOV LCD_X,#6 ;设置位置CJNE A,#1,CONV1JMP CONV2CONV1: MOV A,#" "MOV B,LCD_XCALL LCDP2JMP CONV3CONV2: CALL SHOW_DIG2 ;显示数据CONV3: INC LCD_X ;mov a,72h ;十位CALL SHOW_DIG2inc LCD_Xmov a,71h ;个位CALL SHOW_DIG2inc LCD_XMOV A,#'.'MOV B,LCD_XCALL LCDP2MOV A,70h ;加载小数点位INC LCD_X ;设置位置CALL SHOW_DIG2 ;显示数据RET;-------------------------------------------------------SHOW_DIG2: ;在LCD 的第二行显示数字ADD A,#30HMOV B,LCD_XCALL LCDP2RET;---------------------------------------------------------LCDP2: ;在LCD的第二行显示字符PUSH ACC ;MOV A,B ;设置显示地址ADD A,#0C0H ;设置LCD的第二行地址CALL WCOM ;写入命令POP ACC ;由堆栈取出ACALL WDATA ;写入数据RET;---------------------------------------------------------SET_LCD: ;对LCD 做初始化设置及测试CLR LCD_ENCALL INIT_LCD ;初始化LCDCALL STORE_DATA ;将自定义字符存入LCD的CGRAMRETINIT_LCD: ;8位I/O控制LCD 接口初始化MOV A,#38H ;双列显示,字形5*7点阵CALL WCOMcall delay1MOV A,#38HCALL WCOMcall delay1MOV A,#38HCALL WCOMcall delay1MOV A,#0CH ;开显示,显示光标,光标不闪烁CALL WCOMcall delay1MOV A,#01H ;清除LCD 显示屏CALL WCOMcall delay1RET;==================================================CLR_LINE1: ;清除LCD的第一行字符MOV A,#80H ;设置LCD 的第一行地址CALL WCOM ;MOV R0,#24 ;设置计数值C1: MOV A,#' ' ;载入空格符至LCDCALL WDATA ;输出字符至LCDDJNZ R0,C1 ;计数结束RET;==================================================LCD_PRINT: ;在LCD的第一行或第二行显示字符CJNE A,#1,LINE2 ;判断是否为第一行LINE1: MOV A,#80H ;设置LCD 的第一行地址CALL WCOM ;写入命令CALL CLR_LINE ;清除该行字符数据MOV A,#80H ;设置LCD 的第一行地址CALL WCOM ;写入命令JMP FILLLINE2: MOV A,#0C0H ;设置LCD 的第二行地址CALL WCOM ;写入命令CALL CLR_LINE ;清除该行字符数据MOV A,#0C0H ;设置LCD 的第二行地址CALL WCOMFILL: CLR A ;填入字符MOVC A,@A+DPTR ;由消息区取出字符CJNE A,#0,LC1 ;判断是否为结束码RETLC1: CALL WDATA ;写入数据INC DPTR ;指针加1JMP FILL ;继续填入字符RET;=========================================CLR_LINE: ;清除该行LCD 的字符MOV R0,#24CL1: MOV A,#' 'CALL WDATADJNZ R0,CL1RETDE: MOV R7,#250DJNZ R7,$RET;============================================WCOM: ;以8位控制方式将命令写至LCD MOV P0,A ;写入命令CLR LCD_RS ;RS=L,RW=L,D0-D7=指令码,E=高脉冲CLR LCD_RWSETB LCD_ENACALL DELAY1CLR LCD_ENRET;=============================================WDATA: ;以8位控制方式将数据写至LCD MOV P0,A ;写入数据SETB LCD_RSCLR LCD_RWSETB LCD_ENCALL DECLR LCD_ENCALL DERET;=============================================;PRINT A CHAR ON LINE 1;A=ASC DATA, B=LINE X POS;==============================================LCDP1: ;在LCD的第一行显示字符PUSH ACC ;MOV A,B ;设置显示地址ADD A,#80H ;设置LCD的第一行地址CALL WCOM ;写入命令POP ACC ;由堆栈取出ACALL WDATA ;写入数据RET;============================================== BEEP_BL:MOV R6,#100BL2: CALL DEX1CPL BEEPDJNZ R6,BL2MOV R5,#10CALL DELAYRETDEX1: MOV R7,#180DE2: NOPDJNZ R7,DE2RETDELAY: ;(R5)*延时10MSMOV R6,#50DL1: MOV R7,#100DJNZ R7,$DJNZ R6,DL1DJNZ R5,DELAYRETDELAY1: ;延时5MSMOV R6,#25DL2: MOV R7,#100DJNZ R7,$DJNZ R6,DL2RET;================================================ END。
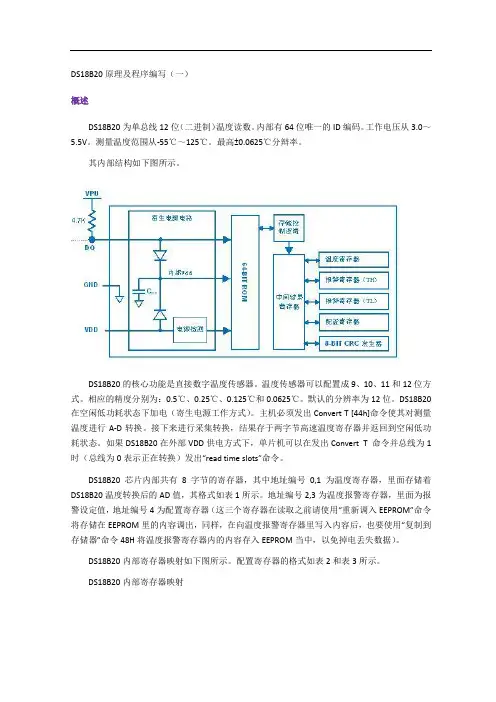
DS18B20原理及程序编写(一)概述DS18B20为单总线12位(二进制)温度读数。
内部有64位唯一的ID编码。
工作电压从3.0~5.5V。
测量温度范围从-55℃~125℃。
最高±0.0625℃分辩率。
其内部结构如下图所示。
DS18B20的核心功能是直接数字温度传感器。
温度传感器可以配置成9、10、11和12位方式。
相应的精度分别为:0.5℃、0.25℃、0.125℃和0.0625℃。
默认的分辨率为12位。
DS18B20在空闲低功耗状态下加电(寄生电源工作方式)。
主机必须发出Convert T [44h]命令使其对测量温度进行A-D转换。
接下来进行采集转换,结果存于两字节高速温度寄存器并返回到空闲低功耗状态。
如果DS18B20在外部VDD供电方式下,单片机可以在发出Convert T 命令并总线为1时(总线为0表示正在转换)发出“read time slots”命令。
DS18B20芯片内部共有8字节的寄存器,其中地址编号0,1为温度寄存器,里面存储着DS18B20温度转换后的AD值,其格式如表1所示。
地址编号2,3为温度报警寄存器,里面为报警设定值,地址编号4为配置寄存器(这三个寄存器在读取之前请使用“重新调入EEPROM”命令将存储在EEPROM里的内容调出,同样,在向温度报警寄存器里写入内容后,也要使用“复制到存储器”命令48H将温度报警寄存器内的内容存入EEPROM当中,以免掉电丢失数据)。
DS18B20内部寄存器映射如下图所示。
配置寄存器的格式如表2和表3所示。
DS18B20内部寄存器映射表1 温度寄存器的格式表2 配置寄存器的格式表3 温度分辨率配置DS18B20使用单总线工作方式,其通信协议以电平的高平时间作为依据,其基本时序有复位时序,写时序、读时序。
//********************************************************************** //** 文件名:DS18B20.c//** 说明:DS18B20驱动程序文件//----------------------------------------------------------------------//** 单位://** 创建人:张雅//** 创建时间:2010-01-20//** 联系方式:QQ:276564402//** 版本:V1.0//----------------------------------------------------------------------//**********************************************************************//----------------------------------------------------------------------//** 芯片:AT89S52//** 时钟:11.0592MHz//** 其它:这个文档为18B20的驱动程序,引用了数码管的驱动。
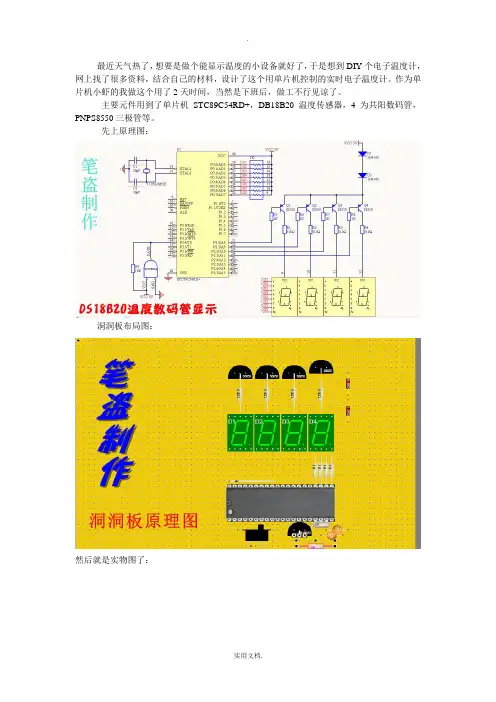
最近天气热了,想要是做个能显示温度的小设备就好了,于是想到DIY个电子温度计,网上找了很多资料,结合自己的材料,设计了这个用单片机控制的实时电子温度计。
作为单片机小虾的我做这个用了2天时间,当然是下班后,做工不行见谅了。
主要元件用到了单片机STC89C54RD+,DB18B20温度传感器,4为共阳数码管,PNPS8550三极管等。
先上原理图:洞洞板布局图:然后就是实物图了:附上源程序:程序是别人写的,我只是自己修改了下,先谢谢原程序者的无私奉献。
#include"reg52.h"#define uchar unsigned char#define uint unsigned intsbit DQ=P3^4; //温度数据口sbit wx1=P2^0; //位选1sbit wx2=P2^1; //位选2sbit wx3=P2^2; //位选3sbit wx4=P2^3; //位选4unsigned int temp, temp1,temp2, xs;uchar code table[]={0xc0,0xf9,0xa4,0xb0,0x99, //共阳数码管0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6};/******延时程序*******/void delay1(unsigned int m){unsigned int i,j;for(i=m;i>0;i--)for(j=110;j>0;j--);}void delay(unsigned int m) //温度延时程序{while(m--);}void Init_DS18B20(){unsigned char x=0;DQ = 1; //DQ复位ds18b20通信端口delay(8); //稍做延时DQ = 0; //单片机将DQ拉低delay(80); //精确延时大于480usDQ = 1; //拉高总线delay(4);x=DQ; //稍做延时后如果x=0那么初始化成功x=1那么初始化失败delay(20);}/***********ds18b20读一个字节**************/uchar ReadOneChar(){unsigned char i=0;unsigned char dat = 0;for (i=8;i>0;i--){DQ = 0; // 高电平拉成低电平时读周期开始dat>>=1;DQ = 1; // 给脉冲信号if(DQ)dat|=0x80; //delay(4);}return(dat);}/*************ds18b20写一个字节****************/void WriteOneChar(unsigned char dat){unsigned char i=0;for (i=8; i>0; i--){DQ = 0; //从高电平拉至低电平时,写周期的开始DQ = dat&0x01; //数据的最低位先写入delay(5); //60us到120us延时DQ = 1;dat>>=1; //从最低位到最高位传入}}/**************读取ds18b20当前温度************/void ReadTemperature(){unsigned char a=0;unsigned b=0;unsigned t=0;Init_DS18B20();WriteOneChar(0xCC); // 跳过读序号列号的操作/WriteOneChar(0x44); // 启动温度转换delay(5); // this message is wery importantInit_DS18B20();WriteOneChar(0xCC); //跳过读序号列号的操作WriteOneChar(0xBE); //读取温度存放器等〔共可读9个存放器〕前两个就是温度/ delay(5);a=ReadOneChar(); //读取温度值低位/b=ReadOneChar(); //读取温度值高位/temp1=b<<4; //高8位中后三位数的值temp1+=(a&0xf0)>>4; //低8位中的高4位值加上高8位中后三位数的值temp1室温整数值temp2=a&0x0f; //小数的值temp=((b*256+a)>>4); //当前采集温度值除16得实际温度值zhenshuxs=temp2*0.0625*10; //小数位,假设为0.5那么算为5来显示xs小数xiaoshu }void wenduxianshi(){wx1=0;P0=table[temp/10]; //显示百位delay1(5);wx1=1;wx2=0;P0=table[temp%10]+0x80; //显示十位加上0x80就显示小数点了。
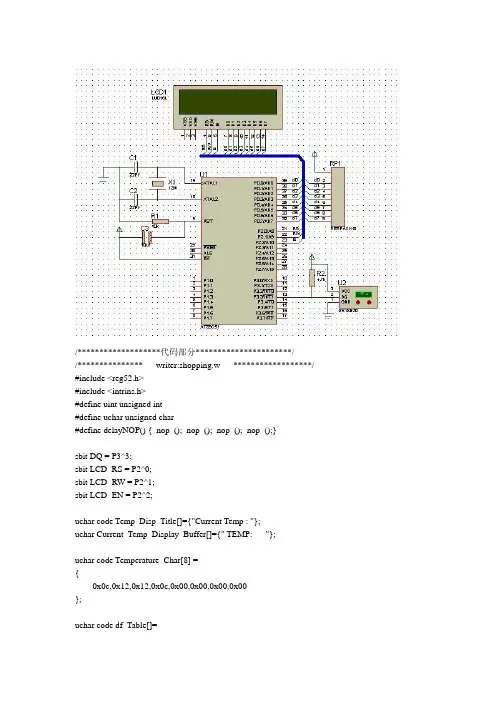
/*******************代码部分**********************//*************** writer:shopping.w ******************/ #include <reg52.h>#include <intrins.h>#define uint unsigned int#define uchar unsigned char#define delayNOP() {_nop_();_nop_();_nop_();_nop_();}sbit DQ = P3^3;sbit LCD_RS = P2^0;sbit LCD_RW = P2^1;sbit LCD_EN = P2^2;uchar code Temp_Disp_Title[]={"Current Temp : "};uchar Current_Temp_Display_Buffer[]={" TEMP: "};uchar code Temperature_Char[8] ={0x0c,0x12,0x12,0x0c,0x00,0x00,0x00,0x00};uchar code df_Table[]=0,1,1,2,3,3,4,4,5,6,6,7,8,8,9,9};uchar CurrentT = 0;uchar Temp_Value[]={0x00,0x00}; uchar Display_Digit[]={0,0,0,0};bit DS18B20_IS_OK = 1;void DelayXus(uint x){uchar i;while(x--){for(i=0;i<200;i++);}}bit LCD_Busy_Check(){bit result;LCD_RS = 0;LCD_RW = 1;LCD_EN = 1;delayNOP();result = (bit)(P0&0x80);LCD_EN=0;return result;}void Write_LCD_Command(uchar cmd) {while(LCD_Busy_Check());LCD_RS = 0;LCD_RW = 0;LCD_EN = 0;_nop_();_nop_();P0 = cmd;delayNOP();LCD_EN = 1;delayNOP();LCD_EN = 0;}void Write_LCD_Data(uchar dat){while(LCD_Busy_Check());LCD_RS = 1;LCD_RW = 0;LCD_EN = 0;P0 = dat;delayNOP();LCD_EN = 1;delayNOP();LCD_EN = 0;}void LCD_Initialise(){Write_LCD_Command(0x01);DelayXus(5);Write_LCD_Command(0x38);DelayXus(5);Write_LCD_Command(0x0c);DelayXus(5);Write_LCD_Command(0x06);DelayXus(5);}void Set_LCD_POS(uchar pos){Write_LCD_Command(pos|0x80); }void Delay(uint x){while(--x);}uchar Init_DS18B20(){uchar status;DQ = 1;Delay(8);DQ = 0;Delay(90);DQ = 1;Delay(8);DQ = 1;return status;}uchar ReadOneByte(){uchar i,dat=0;DQ = 1;_nop_();for(i=0;i<8;i++){DQ = 0;dat >>= 1;DQ = 1;_nop_();_nop_();if(DQ)dat |= 0X80;Delay(30);DQ = 1;}return dat;}void WriteOneByte(uchar dat) {uchar i;for(i=0;i<8;i++){DQ = 0;DQ = dat& 0x01;Delay(5);DQ = 1;dat >>= 1;}}void Read_Temperature(){if(Init_DS18B20()==1)DS18B20_IS_OK=0;else{WriteOneByte(0xcc);WriteOneByte(0x44);Init_DS18B20();WriteOneByte(0xcc);WriteOneByte(0xbe);Temp_Value[0] = ReadOneByte();Temp_Value[1] = ReadOneByte();DS18B20_IS_OK=1;}}void Display_Temperature(){uchar i;uchar t = 150, ng = 0;if((Temp_Value[1]&0xf8)==0xf8){Temp_Value[1] = ~Temp_Value[1];Temp_Value[0] = ~Temp_Value[0]+1;if(Temp_Value[0]==0x00)Temp_Value[1]++;ng = 1;}Display_Digit[0] = df_Table[Temp_Value[0]&0x0f];CurrentT = ((Temp_Value[0]&0xf0)>>4) | ((Temp_Value[1]&0x07)<<4);Display_Digit[3] = CurrentT/100;Display_Digit[2] = CurrentT%100/10;Display_Digit[1] = CurrentT%10;Current_Temp_Display_Buffer[11] = Display_Digit[0] + '0';Current_Temp_Display_Buffer[10] = '.';Current_Temp_Display_Buffer[9] = Display_Digit[1] + '0';Current_Temp_Display_Buffer[8] = Display_Digit[2] + '0';Current_Temp_Display_Buffer[7] = Display_Digit[3] + '0';if(Display_Digit[3] == 0)Current_Temp_Display_Buffer[7] = ' ';if(Display_Digit[2] == 0&&Display_Digit[3]==0)Current_Temp_Display_Buffer[8] = ' ';if(ng){if(Current_Temp_Display_Buffer[8] == ' ')Current_Temp_Display_Buffer[8] = '-';else if(Current_Temp_Display_Buffer[7] == ' ')Current_Temp_Display_Buffer[7] = '-';elseCurrent_Temp_Display_Buffer[6] = '-';}Set_LCD_POS(0x00);for(i=0;i<16;i++){Write_LCD_Data(Temp_Disp_Title[i]);}Set_LCD_POS(0x40);for(i=0;i<16;i++){Write_LCD_Data(Current_Temp_Display_Buffer[i]);}Set_LCD_POS(0x4d);Write_LCD_Data(0x00);Set_LCD_POS(0x4e);Write_LCD_Data('C');}void main(){LCD_Initialise();Read_Temperature();Delay(50000);Delay(50000);while(1){Read_Temperature();if(DS18B20_IS_OK)Display_Temperature();DelayXus(100);}}。
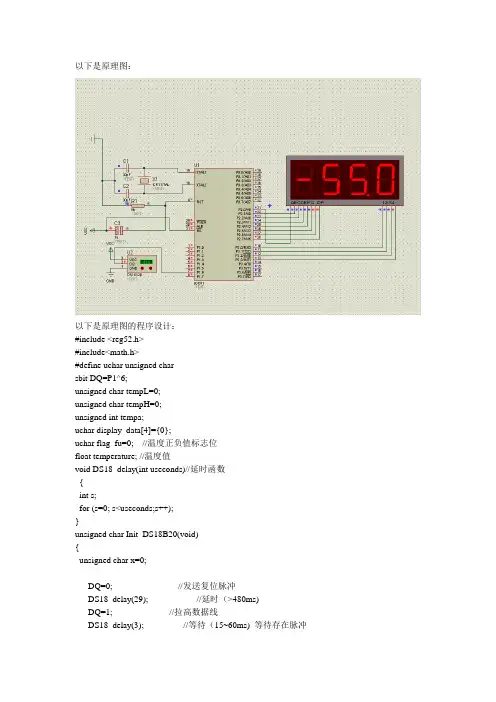
以下是原理图:以下是原理图的程序设计:#include <reg52.h>#include<math.h>#define uchar unsigned charsbit DQ=P1^6;unsigned char tempL=0;unsigned char tempH=0;unsigned int tempa;uchar display_data[4]={0};uchar flag_fu=0; //温度正负值标志位float temperature; //温度值void DS18_delay(int useconds)//延时函数{int s;for (s=0; s<useconds;s++);}unsigned char Init_DS18B20(void){unsigned char x=0;DQ=0; //发送复位脉冲DS18_delay(29); //延时(>480ms)DQ=1; //拉高数据线DS18_delay(3); //等待(15~60ms) 等待存在脉冲x=DQ; //获得存在信号(用于判断是否有器件)DS18_delay(25); // 等待时间隙结束return(x); //返回存在信号,0 = 器件存在, 1 = 无器件}ReadOneChar(void)//读一个字节{unsigned char i=0;unsigned char dat=0;for (i=8;i>0;i--){DQ=1;DS18_delay(1);DQ=0;dat>>=1;//复合赋值运算,等效dat=dat>>1(dat=dat右移一位后的值) DQ=1;if(DQ)dat|=0x80;DS18_delay(4);}return(dat);}WriteOneChar(unsigned char dat){unsigned char i=0;for(i=8;i>0;i--){DQ=0;DQ=dat&0x01;DS18_delay(5);DQ=1;dat>>=1;}DS18_delay(4);}unsigned int ReadTemperature(void){Init_DS18B20();WriteOneChar(0xcc);WriteOneChar(0x44);DS18_delay(125);Init_DS18B20();WriteOneChar(0xcc);WriteOneChar(0xbe);tempL=ReadOneChar();tempH=ReadOneChar();tempa=((tempH*256)+tempL);if(tempa&0x8000){tempa=~tempa;tempa+=1;flag_fu=1;}else{flag_fu=0;}//温度转换,把高低位做相应的运算转化为实际温度temperature=tempa*0.625*8;DS18_delay(200);return temperature ;}void display(){unsigned char code dis[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xbf,0x7f,0xff};P3=0x01;P2=dis[display_data[0]];DS18_delay(10);P3=0x02;P2=dis[display_data[1]];DS18_delay(10);P3=0x04;P2=dis[display_data[2]]+0x80;DS18_delay(10);P3=0x08;P2=dis[display_data[3]];DS18_delay(10);}void main(){unsigned int temp;uchar i;while(1){temp=ReadTemperature();if(flag_fu==0){ if(temp>=1000){display_data[0]=temp/1000;display_data[1]=(temp/100)%10;display_data[2]=(temp/10)%10;display_data[3]=temp%10;}else if(temp>=100){display_data[0]=12;display_data[1]=temp/100;display_data[2]=(temp%100)/10;display_data[3]=temp%10;}else{ display_data[0]=12;display_data[1]=12;display_data[2]=temp/10;display_data[3]=temp%10;}}else{ if(abs(temp)>100){display_data[0]=10;display_data[1]=abs(temp)/100;display_data[2]=(abs(temp)%100)/10;display_data[3]=abs(temp)%10;}else{display_data[0]=12;display_data[1]=10;display_data[2]=abs(temp)/10;display_data[3]=abs(temp)%10;}}for(i=0;i<250;i++)display();}}。
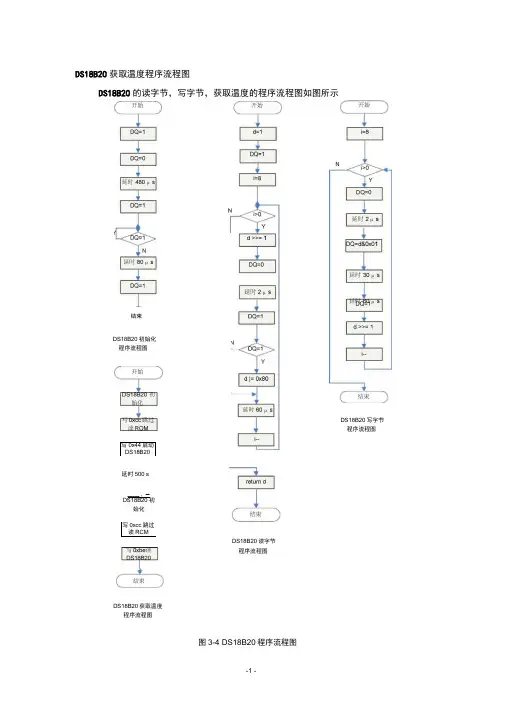
DS18B20获取温度程序流程图DS18B20的读字节,写字节,获取温度的程序流程图如图所示结束DS18B20初始化程序流程图写0x44启动DS18B20延时500 s_____ 、一DS18B20 初始化写0xcc跳过读RCMDS18B20获取温度程序流程图DS18B20读字节程序流程图图3-4 DS18B20程序流程图DS18B20写字节程序流程图显示程序设计显示电路是由四位一体的数码管来实现的。
由于单片机的I/O 口有限,所以数码管采用动态扫描的方式来进行显示。
程序流程图如图所示。
图显示程序流程图按键程序设计按键是用来设定上下限报警温度的。
具体的程序流程图如图所示N附 1 源程序代码******************************************************************* 程序名 ; 基于 DS18B20 的测温系统* 功 能: 实时测量温度,超过上下限报警,报警温度可手动调整。
K1 是用来 * 进入上下限调节模式的,当按一下 K1 进入上限调节模式,再按一下进入下限 * 调节模式。
在正常模式下,按一下K2 进入查看上限温度模式,显示 1s 左右自动* 退出;按一下 K3 进入查看下限温度模式,显示 1s 左右自动退出;按一下 K4 消除 * 按键音,再按一下启动按键音。
在调节上下限温度模式下, K2 是实现加 1 功能, * K1 是实现减 1 功能, K3 是用来设定上下限温度正负的。
* 编程者: ZPZ * 编程时间: 2009/10/2*******************************************************************bit s=0;〃s 是调整上下限温度时温度闪烁的标志位, s=0不显示200ms , s=1 显示 1s 左右bit s1=0; void display1(uint z); #include"ds18b20.h" //s1 标志位用于上下限查看时的显示//声明 display1 ()函数//将 ds18b20.h 头文件包含到主程序#include"keyscan.h" #include"display.h"/***********************//将 keyscan.h 头文件包含到主程序 //将 display.h 头文件包含到主程序 主函数 ************************/#include<AT89X52.h> #include<intrins.h>// 将 AT89X52.h 头文件包含到主程序 //将 intrins.h 头文件包含到主程序(调用其中的 函数延时)_nop_() 空操作#define uint unsigned int #define uchar unsigned char uchar max=0x00,min=0x00;//变量类型宏定义,用 //变量类型宏定义,用//max 是上限报警温度, uint 表示无符号整形( 16 位) uchar 表示无符号字符型( 8 位)min 是下限报警温度void main(){beer=1;led=1; timer1_init(0); get_temperature(1);while(1){keyscan();get_temperature(0);//获取温度函数//关闭蜂鸣器// 关闭LED 灯//初始化定时器1(未启动定时器1)// 首次启动DS18B20 获取温度(DS18B20 上点后自动将EEPROM 中的上下限温度复制到TH 和TL 寄存器)//主循环//按键扫描函数keyscan(); // 按键扫描函数display(temp,temp_d*0.625);// 显示函数 alarm(); //报警函数 keyscan();// 按键扫描函数}}/******************************************************************** * 程序名 ; __ds18b20_h__ * 功 能: DS18B20 的 c51 编程头文件 * 编程者: ZPZ * 编程时间: 2009/10/2* 说 明:用到的全局变量是:无符号字符型变量temp ( 测得的温度整数部分 ),temp_d* ( 测得的温度小数部分 ),标志位 f (测量温度的标志位‘ 0'表示“正温度”‘ 1'表 * 示“负温度”),标志位 f_max (上限温度的标志位‘ 0'表示“正温度”、‘ 1'表 * 示“负温度”),标志位f_min (下限温度的标志位‘ 0'表示“正温度”、‘ 1'表* 示“负温度”),标志位 w ( 报警标志位‘ 1'启动报警‘ 0'关闭报警 ) 。
它的功能是:1.读出当前温度值。
2.可通过按键调整报警温度上下限。
按第一个键,进入温度上线调节模式,第二个键温度加,第三个键温度减,再按一下第一个键,进入温度下线调节模式,第二个键温度加,第三个键温度键,再按一下第一个键,正常显示当前温度。
3.当进入报警温度上下限调节时,红灯亮,当显示当前温度是,绿灯亮。
4.当当前温度超过上限温度时,或者低于下限温度时,蜂鸣器报警且黄灯闪烁。
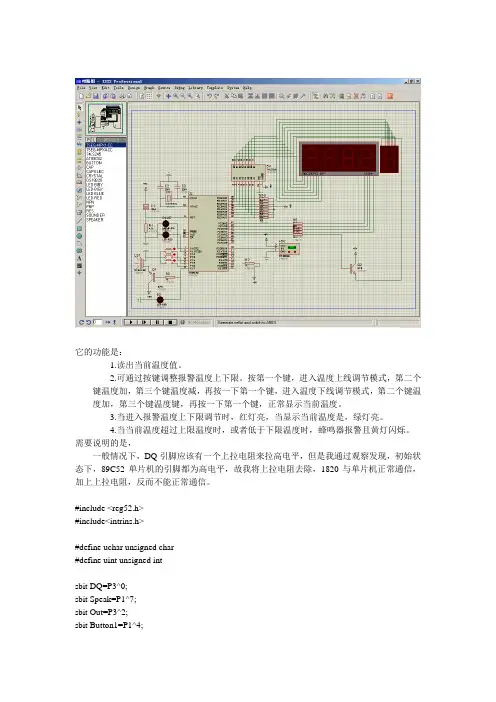
需要说明的是,一般情况下,DQ引脚应该有一个上拉电阻来拉高电平,但是我通过观察发现,初始状态下,89C52单片机的引脚都为高电平,故我将上拉电阻去除,1820与单片机正常通信,加上上拉电阻,反而不能正常通信。
#include <reg52.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned intsbit DQ=P3^0;sbit Speak=P1^7;sbit Out=P3^2;sbit Button1=P1^4;sbit Button2=P1^5;sbit Button3=P1^6;sbit Ledblue=P1^0;sbit Ledred=P1^1;bit Point;uint T;int Up=980,Down=300,Tplace=0;code uchar Ledcode[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x8f}; /*数码管显示的数字0123456789℃*/code uchar Ledcode_s[]={0xbf,0x86,0xdb,0xcf, /*带小数点数码管显示0123456789-*/0xe6,0xed,0xfd,0x87,0xff,0xef,0x40};code uchar Ledplace[]={0,0x1e,0x1d,0x1b,0x17,0x0f}; /*数码管的位置1 2 3 4 5 位*/void Delay_2us(uchar num_us) /*可调度为2us,最大误差为6us,最大延时510us*/ {while(--num_us);}void Delay_8us(uint num_us) /*延时8微妙最大误差263us*/{while(--num_us);}void Delay_ms(uint num_ms) /*延时1毫秒*/{uint i;while(num_ms--){for(i=0;i<123;i++);}}void Speaker() /*蜂鸣器响*/{uint i=50;while(--i)Speak=~Speak;Delay_8us(500);}}void Nospeaker() /*蜂鸣器不响*/ {Speak=0;}bit Reset() /*复位*/{bit flag;DQ=1;_nop_();DQ=0;Delay_8us(70);DQ=1;Delay_2us(20);flag=DQ;Delay_2us(70);DQ=1;Delay_2us(70);return flag;}void Writedata(uchar dat) /*写数据*/{uchar i;bit flag;for(i=0;i<8;i++){flag=dat&0x01;DQ=1;_nop_();DQ=0;Delay_2us(5);DQ=flag;Delay_2us(40);dat=dat>>1;DQ=1;Delay_2us(2);}Readdata() / *读数据*/ {uchar i=0,dat=0;bit flag=0;for(i=0;i<8;i++){DQ=1;_nop_();DQ=0;Delay_2us(5);DQ=1;flag=DQ;Delay_2us(30);DQ=1;Delay_2us(5);dat=dat>>1;if(flag){dat|=0x80;}Delay_2us(3);}Out=0;return dat;}uint ReadTem() /*温度转换*/ {uint High,Low;Reset();Writedata(0xcc);Writedata(0x44);Delay_8us(85);Reset();Writedata(0xcc);Writedata(0xbe);Delay_8us(85);Low=Readdata();High=Readdata();Point=High&0xf8;if(Point){T=(~((High<<8)|Low)+1)*0.625;}else{T=((High<<8)|Low)*0.625;}return T;}Display(uint T) /*显示*/{if(Point){P2=Ledplace[1];P0=Ledcode_s[10];Delay_ms(5);P0=0;}else{P2=Ledplace[1];P0=0;Delay_ms(5);P0=0;}P2=Ledplace[2];P0=Ledcode[T/100];Delay_ms(5);P0=0;P2=Ledplace[3];P0=Ledcode_s[T%100/10];Delay_ms(5);P0=0;P0=Ledcode[T%10];Delay_ms(5);P0=0;P2=Ledplace[5];P0=Ledcode[10];Delay_ms(5);P0=0;}void Outinter() interrupt 0 /*外部中断*/{if((T>Up&&Point==0)||(T>Down&&Point==1)){Speaker();}else{Nospeaker();}Out=1;}main(void) /*主程序*/{EA=1;EX0=1;IT0=0;while(1){switch(Tplace){case 0: {Ledblue=1;Ledred=0;Display(ReadTem());}break;case 1: {Ledred=1;Ledblue=0;Point=0;Display(Up);}break;case 2: {Ledred=1;Ledblue=0;Point=1;Display(Down);}break;}if(!Button1){Delay_ms(300);if(Tplace==3){Tplace=0;}}if(!Button2&&Tplace==1){Delay_ms(300);Up=Up+10;if(Up>990){Up=0;}}if(!Button3&&Tplace==1){Delay_ms(300);Up=Up-10;if(Up<0){Up=990;}}if(!Button2&&Tplace==2){Delay_ms(300);Down=Down-10;if(Down<0){Down=550;}}if(!Button3&&Tplace==2){Delay_ms(300);Down=Down+10;if(Down>550){Down=0;}}}}用ISIS模拟,显示正常,但是将模拟的电路焊出来,反而出现了几个问题:1.必须去掉第五位数码管选择位管脚的三极管,数码管方能正常显示。

18b20测温数码管显示实验--精确到小数点后4位//滑国虎于09.9.20完成////DS18B20的读写程序,数据脚P1.5 ////温度传感器18B20程序,采用器件默认的12位转化 ////最大转化时间750微秒,显示温度-55到+125度,显示精度 // //为0.1度,显示采用4位LED共阳显示测温值 ////P0口为段码输入,P27~P21为位选 ///***************************************************/#include "reg51.h"#include "intrins.h" //_nop_();延时函数用 #define Disdata P0 //段码输出口 #define discan P2 //扫描口 #define uchar unsigned char #define uint unsigned intsbit DQ=P1^5; //温度输入口 sbit DIN=P0^7; //LED小数点控制 uint h;uint temp;//uchar codedis_7[12]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff,0x bf};//共阳LED段码表 "0" "1" "2" "3" "4" "5" "6" "7" "8" "9" "不亮""-"uchar code scan_con[7]={0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd}; //列扫描控制字uchar data temp_data[2]={0x00,0x00}; //读出温度暂放 uchar data display[7]={0x00,0x00,0x00,0x00,0x00,0x00,0x00}; //显示单元数据,共4个数据和一个运算暂用/*****************11us延时函数*************************///void delay(uint t) //11us{for (;t>0;t--);}///****************DS18B20复位函数************************/ow_reset(void){char presence=1;while(presence){while(presence){DQ=1;_nop_();_nop_();//从高拉倒低DQ=0;delay(50); //550 usDQ=1;delay(6); //66 uspresence=DQ; //presence=0 复位成功,继续下一步}delay(45); //延时500 uspresence=~DQ;}DQ=1; //拉高电平 }/****************DS18B20写命令函数************************/ //向1-WIRE 总线上写1个字节void write_byte(uchar val){uchar i;for(i=8;i>0;i--){DQ=1;_nop_();_nop_(); //从高拉倒低DQ=0;_nop_();_nop_();_nop_();_nop_(); //5 usDQ=val&0x01; //最低位移出delay(6); //66 usval=val/2; //右移1位}DQ=1;delay(1);}/****************DS18B20读1字节函数************************/ //从总线上取1个字节uchar read_byte(void){uchar i;uchar value=0;for(i=8;i>0;i--){DQ=1;_nop_();_nop_();value>>=1;DQ=0;_nop_();_nop_();_nop_();_nop_(); //4 usDQ=1;_nop_();_nop_();_nop_();_nop_(); //4 usif(DQ)value|=0x80;delay(6); //66 us}DQ=1;return(value);}/****************显示扫描函数***************************/ scan(){char k;for(k=0;k<7;k++) //4位LED扫描控制{Disdata=dis_7[display[k]]; //数据显示 P0if (k==2){DIN=0;} //小数点显示 P0.7discan=scan_con[k]; //位选 P2delay(150);discan=0xff;}}/****************读出温度函数************************/ //read_temp(){ow_reset(); //总线复位delay(200);write_byte(0xcc); //发命令write_byte(0x44); //发转换命令ow_reset();delay(1);write_byte(0xcc); //发命令write_byte(0xbe);temp_data[0]=read_byte(); //读温度值的低字节temp_data[1]=read_byte(); //读温度值的高字节temp=temp_data[1];temp=temp&0x0f; //去掉符号位temp=temp<<8; //temp为16位temp=temp|temp_data[0]; // 两字节合成一个整型变量。
目录第1章绪论 (1)1.1 选题目的 (1)1.2 设计要求 (1)第2章电路结构及工作原理 (2)2.1 电路方框图 (2)2.1.1 电路图 (2)2.1.2 系统流程 (3)2.2芯片介绍 (5)2.2.1 DS18B20 (5)2.2.1.1 DS18B20的工作原理 (5)2.2.1.2 DS18B20的使用方法 (6)2.2.2 AT89C51 (8)2.2.2.1 AT89C51简介 (8)第3章整机工作原理 (10)第4章系统调试与分析 (12)4.1 系统的调试 (12)4.2系统的分析 (12)结论 (13)收获和体会 (14)致谢 (15)参考文献 (16)附录一元件清单 (17)课程设计任务书年月日第1章绪论1.1 选题目的随着人们生活水平的不断提高,单片机技术已经普及到我们生活,工作,科研等各个领域。
单片机控制无疑是人们追求的目标之一,它所给人带来的方便是不可否定的,其中数字温度计就是一个典型的例子,但人们对它的要求越来越高,要为现代人工作、科研、生活提供更好的更方便的设施就需要从数单片机技术入手,一切向着数字化控制,智能化控制方向发展。
本文利用单片机结合传感器技术开发设计,把传感器理论与单片机实际应用有机结合,详细地讲述了利用温度传感器DS18B20测量环境温度,设置上下报警温度,当温度不在设置范围内是,可以报警。
同时51单片机在现代电子产品中广泛应用以及其技术已经非常成熟,DS18B20可以直接读出被测温度值,而且采用一线制与单片机相连,减少了外部的硬件电路,具有低成本和易使用的特点。
1.2 设计要求(1)设计题目和设计指标测量温度范围为0-100℃。
并通过数码管显示(2)设计功能利用DS18B20实现温度采集,并用数码管显示第2章 电路结构及工作原理2.1 电路方框图图2-1 电路方框图2.1.1 电路图2.1.2 系统流程图2-3 读DS18B20的子程序图2-4 读转换温度子程序2.2芯片介绍2.2.1 DS18B202.2.1.1 DS18B20的工作原理当DS18B20接收到温度转换命令后,开始启动转换。

DS18B20单线数字温度传感器DALLAS半导体公司的数字化温度传感器DS1820是世界上第一片支持“一线总线”接口的温度传感器,体积更小、适用电压更宽、更经济。
一线总线独特而且经济的特点,使用户可轻松地组建温度传感器网络,为测量系统的构建引入全新概念。
DS18B20、DS1822 “一线总线”数字化温度传感器同DS1820一样,支持“一线总线”接口,测量温度范围为-55°C~+125°C,在-10~+85°C范围内,精度为±0.5°C,而DS1822的精度较差为± 2°C 。
现场温度直接以“一线总线”的数字方式传输,大大提高了系统的抗干扰性,适合于恶劣环境的现场温度测量,如:环境控制、设备或过程控制、测温类消费电子产品等。
DS18B20可以程序设定9~12位的分辨率,精度为±0.5°C,分辨率设定,以及用户设定的报警温度存储在EEPROM中,掉电后依然保存。
DS1822与DS18B20软件兼容,是DS18B20的简化版本。
省略了存储用户定义报警温度、分辨率参数的EEPROM,精度降低为±2°C,适用于对性能要求不高,成本控制严格的应用,是经济型产品。
继“一线总线”的早期产品后,DS1820开辟了温度传感器技术的新概念。
DS18B20和DS1822使电压、特性及封装有更多的选择,让我们可以构建适合自己的经济的测温系统。
1、 DS18B20性能特点DS18B20的性能特点:①采用单总线专用技术,既可通过串行口线,也可通过其它I/O口线与微机接口,无须经过其它变换电路,直接输出被测温度值(9位二进制数,含符号位),②测温范围为-55℃-+125℃,测量分辨率为0.0625℃,③内含64位经过激光修正的只读存储器ROM,④适配各种单片机或系统机,⑤用户可分别设定各路温度的上、下限,⑥内含寄生电源。
最近都在学习和写单片机的程序, 今天有空又模仿DS18B20温度测量显示实验写了一个与DS18B20基于单总线通信的程序.DS18B20 数字温度传感器(参考:智能温度传感器DS18B20的原理与应用)是DALLAS 公司生产的1-Wire,即单总线器件,具有线路简单,体积小的特点。
因此用它来组成一个测温系统,具有线路简单,在一根通信线,可以挂很多这样的数字温度计。
DS18B20 产品的特点: (1)、只要求一个I/O 口即可实现通信。
(2)、在DS18B20 中的每个器件上都有独一无二的序列号。
(3)、实际应用中不需要外部任何元器件即可实现测温。
(4)、测量温度范围在-55 到+125℃之间; 在-10 ~ +85℃范围内误差为±5℃; (5)、数字温度计的分辨率用户可以从9 位到12 位选择。
将12位的温度值转换为数字量所需时间不超过750ms;(6)、内部有温度上、下限告警设置。
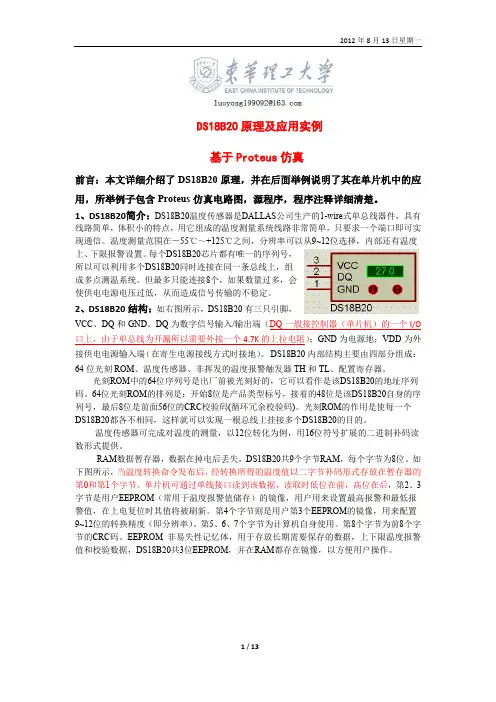
DS18B20引脚分布图DS18B20 详细引脚功能描述:1、GND 地信号;2、DQ数据输入出引脚。
开漏单总线接口引脚。
当被用在寄生电源下,此引脚可以向器件提供电源;漏极开路, 常太下高电平. 通常要求外接一个约5kΩ的上拉电阻.3、VDD可选择的VDD 引脚。
电压范围:3~5.5V; 当工作于寄生电源时,此引脚必须接地。
DS18B20存储器结构图暂存储器的头两个字节为测得温度信息的低位和高位字节;第3, 4字节是TH和TL的易失性拷贝, 在每次电复位时都会被刷新;第5字节是配置寄存器的易失性拷贝, 同样在电复位时被刷新;第9字节是前面8个字节的CRC检验值.配置寄存器的命令内容如下:MSBLSBR0和R1是温度值分辨率位, 按下表进行配置.默认出厂设置是R1R0 = 11, 即12位.温度值分辨率配置表4种分辨率对应的温度分辨率为0.5℃, 0.25℃, 0.125℃, 0.0625℃(即最低一位代表的温度值)12位分辨率时的两个温度字节的具体格式如下:低字节:高字节:其中高字节前5位都是符号位S, 若分辨率低于12位时, 相应地使最低为0, 如: 当分辨率为10位时, 低字节为:, 高字节不变....一些温度与转换后输出的数字参照如下:由上表可看出, 当输出是负温度时, 使用补码表示, 方便计算机运算(若是用C语言, 直接将结果赋值给一个int变量即可).DS18B20 的使用方法:由于DS18B20 采用的是1-Wire 总线协议方式,即在一根数据线实现数据的双向传输,而对单片机来说,我们必须采用软件的方法来模拟单总线的协议时序来完成对DS18B20芯片的访问。
DS18B20温度传感器测温通过数码管显示(详尽版)/*-----------------------------------------------名称:DS18B20温度传感器数码管显示编写:JR日期:2017.12修改:无内容:利用DS18B20温度传感器测量温度-40~+100℃,通过数码管显示单片机开发板使用“金容电子(https:///item.htm?id=544540401703)”开发的JR51单片机开发板。
------------------------------------------------*/#include<reg52.h>#include<stdio.h>#include<intrins.h>#include"delayus.h"#define uchar unsigned char#define uint unsigned intsbit DQ=P2^2; //温度传感器信号线sbit dula=P2^6; //数码管段选线sbit wela=P2^7; //数码管位选线sbit beep=P2^3; //数码管位选线uint temper;uchar a1,a2,a3,a4,a5,n;uint aaa,num;uint warn_l=3000; //低温-40℃报警,测试温度乘以100uint warn_h=10000; //高温100℃报警,测试温度乘以100float ttt;void disp(uchar num0,uchar num1,uchar num2,uchar num3,uchar num4,uchar num5);const uchar table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x40,0x00};//不带小数点0-9编码const uchar table1[]={0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef}; //带小数点0-9编码uchar data temp_data[2]={0x00,0x00}; //读出温度暂放void delay(uint z){uint x,y;for(x=z;x>0;x--)for(y=110;y>0;y--);}/*******************************************************************18B20复位初始化函数1、将数据线拉高到12、延时2us(该时间要求不是很严格,但是要尽可能短一点)3、将数据线拉低到04、延时750us(该时间范围可以在480~960us)5、将数据线拉高到16、延时等待(70us),如果初始化成功则在15~60us内产生一个由18B20返回的低电平0,据该状态可以确定它的存在。
//DS18B20温度传感器和数码管显示//编程时间:连线表: CPU=stc89C52 SysClock=12MHz// LEDLE= 控制位高电平有效 LEDSEG=P2 KEYBOARD=P3 LEDWEI=,LED高到底//**********************************************************//DS18B20//**********************************************************//连线表: CPU=stc89C52 SysClock=12MHz *//单总线: TMDAT=////**********************************************************#include <>#define uchar unsigned char#define uint unsigned intuchar discount=0;//显示扫描位计数uchar last=0;//最终温度值uchar itcount=0x13;//定时器延时计数uchar seg[4];//数码管显示暂存uchar tem[2];//读取温度暂存uchar flag=0;//温度正负标志位/********************LED引脚定义********************/sfr LEDSEG=0x80;//P2sfr LEDWEI=0xA0;//P3/********************DS18B20引脚定义********************/sbit TMDAT=P1^0; //温度传感器数据位/********************DS18B20函数定义*******************/void dmsec(uint count);//延时(count)毫秒void tmreset(void); //产生复位信号void tmpre(void); //检测器件应答信号bit tmrbit(void); //从总线读一个bituchar tmrbyte(void); //从总线读一个字节void mwbyte(uchar dat);//向总线写一个字节void tmstart(void); //启动一次温度转换uchar tmrtemp(void); //读取温度数据/********************LED函数定义*******************/uchar * uchartodectoseg(uchar unm);//字符转换为十进制然后转换为数码管段表void disp(uchar *seg);//显示函数void delay_ms(uint t); //延时函数/************************************************/uchar code table[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0xc6};/*************数码表*******0 1 2 3 4 5 6 7 8 9 无显示 C**************/ /************************************************/uchar * uchartodectoseg(uchar unm){uchar x00,xx,x0,x,n;x00=unm/100;//取百位xx=unm%100;//取余x0=xx/10;//取十位x=xx%10;//取余即取个位n=0;seg[n]=table[x00];n++;seg[n]=table[x0];n++;seg[n]=table[x];n++;seg[n]=table[11];//最后一位显示摄氏度符号Cif(flag==1)seg[0]=0x40;//显示负号‘-’if(seg[0]==table[0])seg[0]=table[10]; //如果百位为零则不显示if((seg[0]==table[0])&(seg[1]==table[0]))seg[1]=table[10];//如果百位为零且十位为零则十位不显示return seg;}/***************************************************/ /******DELAY***************************/void delay_ms(uint t){uint m,n;for(m=0;m<t;m++){for(n=0;n<950;n++);}}/******************************************//*********************显示LEDSEG*****************************/void disp(uchar *seg){uchar wei[]={0x08,0x04,0x02,0x01};//位扫描码//LEDSEG=seg[10];LEDWEI =wei[discount];LEDSEG = seg[discount];delay_ms(1);discount++;if(discount==4){ delay_ms(1);discount=0;//LEDSEG=seg[10];LEDWEI=wei[discount];LEDSEG=seg[discount];}//检测是否扫描完,扫描完的话则重新置初值}/*********************************************************//*****************DS18B20函数体定义****************/void dmsec(uint count) {uint i;while(count--){for(i=0;i<125;i++){} }}void tmreset(void){uint i;TMDAT=0;i=103;while(i>0) i--;TMDAT=1;i=4;while(i>0) i--;}void tmpre(void){uint i;while(TMDAT);while(~TMDAT);i=4;while(i>0) i--;}bit tmrbit(void){uint i;bit dat;TMDAT=0;i++;TMDAT=1;i++;i++;dat=TMDAT;i=8;while(i>0) i--;return(dat);}uchar tmrbyte(void){uchar i,j,dat;dat=0;for(i=1;i<=8;i++){ j=tmrbit();dat=(j<<7)|(dat>>1); }return(dat);}void tmwbyte(uchar dat) {uint i;uchar j;bit testb;for(j=1;j<=8;j++){ testb=dat & 0x01; dat=dat>>1;if(testb){ TMDAT=0;i++; i++;TMDAT=1;i=8;while(i>0) i--; }else{ TMDAT=0;i=8;while(i>0) i--; TMDAT=1;i++; i++;}}}void tmstart(void){tmreset();tmpre();dmsec(1);tmwbyte(0xcc);tmwbyte(0x44);}uchar tmrtemp(void){uchar y1,y2,y3;tmreset();tmpre();dmsec(1);tmwbyte(0xcc);tmwbyte(0xbe);tem[0]=tmrbyte();tem[1]=tmrbyte();if(tem[1]>127){tem[1]=(255-tem[1]);tem[0]=(255-tem[0]);flag=1;} //负温度求补码y1=tem[0]>>4;y2=tem[1]<<4;y3=y1|y2;return(y3);}/*********************************************************/void main(){TMOD=0X01;TL0=0XB0;TH0=0X3C;EA=1;ET0=1;TR0=1;dmsec(1);tmstart();while(1){uchartodectoseg(last);disp(seg);}}void time0() interrupt 1{TL0=0XB0;TH0=0X3C;//定时50msitcount--;if(itcount==0){last=tmrtemp();dmsec(1);tmstart();itcount=0x13;}}。
数字温度传感器DS18B20摘要DS-18B20 数字温度传感器具有耐磨耐碰,体积小,使用方便,封装形式多样,适用于各种狭小空间设备数字测温和控制领域。
应用范围广泛,适用于冷冻库,粮仓,储罐,电讯机房,电力机房,电缆线槽等测温和控制领域,轴瓦,缸体,纺机,空调,等狭小空间工业设备测温和控制和汽车空调、冰箱、冷柜、以及中低温干燥箱等。
一、引脚图DS18B20引脚定义:(1)DQ为数字信号输入/输出端;(2)GND为电源地;(3)VDD为外接供电电源输入端(在寄生电源接线方式时接地)二、DS18B20的主要特性1.1、电压范围:3.0~5.5V,在寄生电源方式下可由数据线供电1.2、DS18B20在与微处理器连接时仅需要一条口线即可实现微处理器与DS18B20的双向通讯1.3、多个DS18B20可以并联在唯一的三线上,实现组网多点测温1.4、DS18B20在使用中不需要任何外围元件1.5、温范围-55℃~+125℃,在-10~+85℃时精度为±0.5℃1.6、可编程的分辨率为9~12位,对应的可分辨温度分别为0.5℃、0.25℃、0.125℃和0.0625℃,可实现高精度测温1.7、在9位分辨率时最多在93.75ms内把温度转换为数字,12位分辨率时最多在750ms内把温度值转换为数字,速度更快1.8、测量结果直接输出数字温度信号,以"一线总线"串行传送给CPU,同时可传送CRC校验码,具有极强的抗干扰纠错能力1.9、负压特性:电源极性接反时,芯片不会因发热而烧毁,但不能正常工作。
三、DS18B20的外形和内部结构DS18B20内部结构主要由四部分组成:64位光刻ROM 、温度传感器、非挥发的温度报警触发器TH和TL、配置寄存器。
DS18B20内部结构图四、DS18B20工作原理DS18B20的温度转换时的延时时间由2s 减为750ms。
DS18B20测温原理如图3所示。
DS18B20温度测试程序(51单片机数码管显示)+电路图•下面是电路图采用4位数码管显示程序一共有2个文件:/****************************************************************************** *****************************************ds18b20.h 头文件******************************************************************************* ****************************************/#ifndef _DS18B20_H_#define _DS18B20_H_#include <reg51.h>#define led P1#define ledw P2extern unsigned char f;extern void ds18b20_reset();extern void dela(unsigned char i);extern void ds18b20_write(unsigned char dat);extern unsigned char ds18b20_read();extern unsigned char ds18b20_temp();extern unsigned char ledtab[];#endif/****************************************************************************** **************************************ds18b20.c 文件******************************************************************************* *************************************/#include"ds18b20.h"#define uchar unsigned char#define uint unsigned int#define led P1#define ledw P2uchar ledtab[]={0xc0,0xf9,0xa4, 0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};sbit dq=P3^7 ;uchar delay,f;//uchar f;void dela(uchar i) //5us t=5+i*2{while(--i);}void ds18b20_reset(){while(1){dq=1;dq=0;delay=250; //540us延时,当delay=1时延时为2us ,T=2*xwhile(--delay);dq=1;delay=25;while(--delay);while(dq==0){delay=220;while(--delay);if(dq==1)break;}delay=150;while(--delay);break;}}void ds18b20_write(uchar dat) {uchar i=0;for(i=0;i<8;i++){dq=1;dq=0;delay=3;while(--delay);dq=dat&0x01;delay=35;while(--delay);dq=1;dat=dat>>1;}}uchar ds18b20_read(){uchar i=0,m=0;for(i=0;i<8;i++){//m>>=1dq=1;dq=0;delay=4;while(--delay);dq=1;delay=4;while(--delay);if(dq==1)m|=0x01<<i;//m=m|0x80;delay=25;while(--delay);dq=1;delay=1;while(--delay);}return m;}uchar ds18b20_temp(){uchar temp=0,temph=0,templ=0,k=0; ds18b20_reset();ds18b20_write(0xcc);ds18b20_write(0x44);ds18b20_reset();ds18b20_write(0xcc);ds18b20_write(0xbe);templ=ds18b20_read();temph=ds18b20_read();if((temph&0xf80)!=0){f=1;templ=~templ;temph=~temph;k=templ+1;templ=k;if(templ>0xff){temph++;}}elsef=0;templ=templ>>4;temph=temph<<4;temp=templ|temph;return temp;}/****************************************************************************** ************************************main.c 主文件******************************************************************************* ************************************/#include<reg51.h>#include"ds18b20.h"#define uchar unsigned charvoid main(){uchar a=0,b=0,c=0,temp=0;while(1){temp=ds18b20_temp();a=temp/100;b=temp0/10;c=temp;if(f==1){led=0xbf;ledw=1;dela(5000);ledw=0;dela(600);}led=ledtab[c]; ledw=8;dela(5000); ledw=0;dela(600) ;led=ledtab[b]; ledw=4;dela(5000); ledw=0;dela(600) ;led=ledtab[a]; ledw=2;dela(5000);ledw=0;dela(600) ; }}。
DS18B20温度传感器数字温度传感器DS18B20是由Dallas半导体公司生产的,它具有耐磨耐碰,体积小,使用方便,封装形式多样(如图1.1.1),适用于各种狭小空间设备数字测温和控制领域。
图1.1.1引脚说明:GND为接地引脚;DQ为数据输入输出脚。
用于单线操作,漏极开路;VCC接电源正;单总线通常要求接一个约4.7K左右的上拉电阻,这样,当总线空闲时,其状态为高电平。
如图1.1.2是温度传感器DS18B20的接线图图1.1.2温度传感器DS18B20的参数:●适应电压范围更宽,电压范围:3.0~5.5V,在寄生电源方式下可由数据线供电●温范围-55℃~+125℃,在-10~+85℃时精度为±0.5℃●可编程的分辨率为9~12位,对应的可分辨温度分别为0.5℃、0.25℃、0.125℃和0.0625℃,可实现高精度测温●在9位分辨率时最多在93.75ms内把温度转换为数字,12位分辨率时最多在750ms内把温度值转换为数字,速度更快●被测温度用符号扩展的16位数字量方式串行输出●有两种供电方式既可以直接加 3.0~5.5V的电源,也可以采用寄生电源方式由数据线供电DS18B20内部结构及功能:DS18B20的内部结构如图1.1.3所示。
主要包括:寄生电源,温度传感器,64位ROM和单总线接口,存放中间数据的高速暂存器RAM,用于存储用户设定温度上下限值的TH和TL触发器,存储与控制逻辑,8位循环冗余校验码(CRC)发生器等7部分。
开始8位是产品类型的编号,接着共有48 位是DS18B20 唯一的序列号。
最后8位是前面56 位的CRC 检验码,这也是多个DS18B20 可以采用一线进行通信的原因。
高速暂存存储器:高速暂存存储器由9个字节组成,其分配如图所示。
高速暂存存储器字节0~1 温度寄存器当DS18B20接收到温度转换命令后,开始启动转换。
转换完成后的温度值就以16位带符号扩展的二进制补码形式存储在高速暂存存储器的第1,2字节。
最近天气热了,想要是做个能显示温度的小设备就好了,于是想到DIY个电子温度计,网上找了很多资料,结合自己的材料,设计了这个用单片机控制的实时电子温度计。
作为单片机小虾的我做这个用了2天时间,当然是下班后,做工不行见谅了。
主要元件用到了单片机STC89C54RD+,DB18B20温度传感器,4为共阳数码管,PNPS8550三极管等。
先上原理图:
洞洞板布局图:
然后就是实物图了:
附上源程序:程序是别人写的,我只是自己修改了下,先原程序者的无私奉献。
#include"reg52.h"
#define uchar unsigned char
#define uint unsigned int
sbit DQ=P3^4; //温度数据口
sbit wx1=P2^0; //位选1
sbit wx2=P2^1; //位选2
sbit wx3=P2^2; //位选3
sbit wx4=P2^3; //位选4
unsigned int temp, temp1,temp2, xs;
uchar code table[]={0xc0,0xf9,0xa4,0xb0,0x99, //共阳数码管 0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6};
/******延时程序*******/
void delay1(unsigned int m)
{
unsigned int i,j;
for(i=m;i>0;i--)
for(j=110;j>0;j--);
}
void delay(unsigned int m) //温度延时程序
{
while(m--);
}
void Init_DS18B20()
{
unsigned char x=0;
DQ = 1; //DQ复位 ds18b20通信端口
delay(8); //稍做延时
DQ = 0; //单片机将DQ拉低
delay(80); //精确延时大于 480us
DQ = 1; //拉高总线
delay(4);
x=DQ; //稍做延时后如果x=0则初始化成功 x=1则初始化失败
delay(20);
}
/***********ds18b20读一个字节**************/
uchar ReadOneChar()
{
unsigned char i=0;
unsigned char dat = 0;
for (i=8;i>0;i--)
{
DQ = 0; // 高电平拉成低电平时读周期开始
dat>>=1;
DQ = 1; // 给脉冲信号
if(DQ)
dat|=0x80; //
delay(4);
}
return(dat);
}
/*************ds18b20写一个字节****************/
void WriteOneChar(unsigned char dat)
{
unsigned char i=0;
for (i=8; i>0; i--)
{
DQ = 0; //从高电平拉至低电平时,写周期的开始
DQ = dat&0x01; //数据的最低位先写入
delay(5); //60us到120us延时
DQ = 1;
dat>>=1; //从最低位到最高位传入
}
}
/**************读取ds18b20当前温度************/
void ReadTemperature()
{
unsigned char a=0;
unsigned b=0;
unsigned t=0;
Init_DS18B20();
WriteOneChar(0xCC); // 跳过读序号列号的操作/
WriteOneChar(0x44); // 启动温度转换
delay(5); // this message is wery important
Init_DS18B20();
WriteOneChar(0xCC); //跳过读序号列号的操作
WriteOneChar(0xBE); //读取温度寄存器等(共可读9个寄存器)前两个就是温度/ delay(5);
a=ReadOneChar(); //读取温度值低位 /
b=ReadOneChar(); //读取温度值高位 /
temp1=b<<4; //高8位中后三位数的值
temp1+=(a&0xf0)>>4; //低8位中的高4位值加上高8位中后三位数的值temp1室温整数值
temp2=a&0x0f; //小数的值
temp=((b*256+a)>>4); //当前采集温度值除16得实际温度值 zhenshu xs=temp2*0.0625*10; //小数位,若为0.5则算为5来显示 xs小数 xiaoshu
}
void wenduxianshi()
{
wx1=0;
P0=table[temp/10]; //显示百位
delay1(5);
wx1=1;
wx2=0;
P0=table[temp%10]+0x80; //显示十位加上0x80就显示小数点了。
delay1(5);
wx2=1;
wx3=0;
P0=table[xs%10]; //显示个位
delay1(5);
wx3=1;
wx4=0;
P0=table[12]; //显示 C 字符
delay1(5);
wx4=1;
}
void main()
{
while(1)
{
ReadTemperature();
wenduxianshi();
}
}。