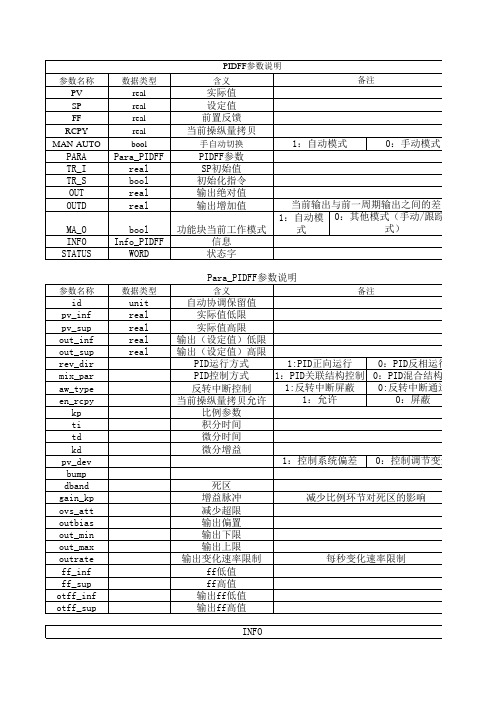
PID功能块参数表
- 格式:doc
- 大小:265.50 KB
- 文档页数:12
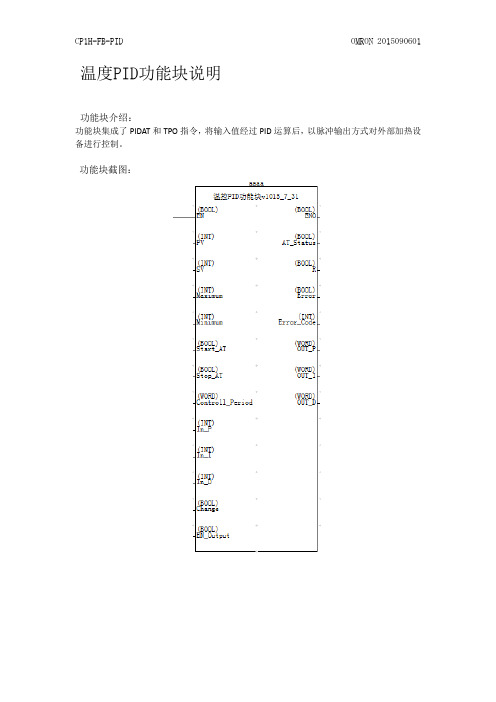
温度PID功能块说明
功能块介绍:
功能块集成了PIDAT和TPO指令,将输入值经过PID运算后,以脉冲输出方式对外部加热设备进行控制。
功能块截图:
参数说明:
实例应用:
1、对功能块地址进行定义
2、设置输入参数
温度传感器数据在2通道,当前温度为22度(16 hex)
设定的加热温度为60度(3C hex)
最大设定值1300度(0514 hex)最小设定值-200度(FF38 hex)即温度传感器的测量范围(注:请保证所有的温度设定为相同的单位,如果传感器采样精度为0.1℃,当前温度则会变为220,此时目标温度请设定为600,代表60℃。
对应的最大设定温度值也依此比例放大)R的控制周期设为1秒即100个单位0064 hex
EN_Output为控制实际输出的使能条件,用于保证功能块关闭时可以停止实际输出。
迟滞值设置为无迟滞
3、启用功能块,执行自整定。
将W0.00和W1.01置1
AT_Status 为1,说明在自整定中
自整定完成后该位会置0,并且得出PID参数,开始PID控制。
如果需要手动修改PID值,则填入In_P In_I In_D 三个参数,再将为Change置一。
改变PID值后,指令将按照新的PID值进行控制。
4.直接使用已有的PID参数启动PID功能块:
由于不执行AT指令,P,I,D内的值为‘0’,所以PID_Error 置1,故障代码#0601。
需要添加以下程序自动复位#0601的错误,并且输入设定好的PID参数。
功能块可以正常运行。


PID功能块此主题包括PID功能块将所有必要的逻辑联合起来,以实现模拟量输入通道处理,为非线性控制(包含平方误差和锯齿增益)的比例-积分-微分(PID)控制,还有模拟量输出通道处理。
PID功能块支持模式控制,信号缩放和限制,前馈控制,超驰跟踪,报警检测,还有信号状态传播。
您可以使能仿真来支持测试。
这允许测量值和状态以手动或另一个功能块经由SIMULATE_IN输入来提供。
串级(Cas)模式下,设定值(SP)由主控制器调整。
自动(Auto)模式下,SP可以由操作员调整。
在这两种模式下,输出是由标准或者级数PID方程形式来计算的。
手动(Man)模式下,功能块输出由操作员设置。
PID功能块也有两种远程模式,远程串级和远程输出。
这些模式和串级还有手动模式相似,只是SP和OUT由远程监督程序提供。
PID功能块可以直接连接到过程I/O(在DeltaV里面,不过不适合现场总线设备)。
它也可以通过IN和OUT参数连接到其它功能块来实现串级或其它复杂控制策略。
把BKCAL_IN和下游功能块的BKCAL_OUT连接起来可以防止积分饱和并提供无扰动传递。
连接跟踪输入(TRK_VAL)来实现外部控制输出跟踪。
PID功能块BKCAL_IN是来自下游功能块的BKCAL_OUT作为一个功能块无扰动传递的输出的值和状态。
如果PID在串级里是另一个控制器的主回路,这个连接很重要。
没有这个连接,副回路控制器不转换到CAS并且主PID不会激活。
CAS_IN是来自另一个功能块的远程SP值。
FF_VAL是前馈控制输入值和状态。
IN是到来自另一个功能块过程变量(PV)的连接。
SIMULATE_IN是功能块用来在仿真使能时替代模拟测量值的输入值和状态。
TRK_IN_D初始化外部跟踪功能。
TRK_VAL是缩放后应用到OUT的值。
BKCAL_OUT是送到上游功能块来防止积分饱和,提供闭环控制无扰动传递的值和状态。
OUT是功能块输出的值和状态。
原理图-PID功能块下图显示了PID功能块的内部结构。
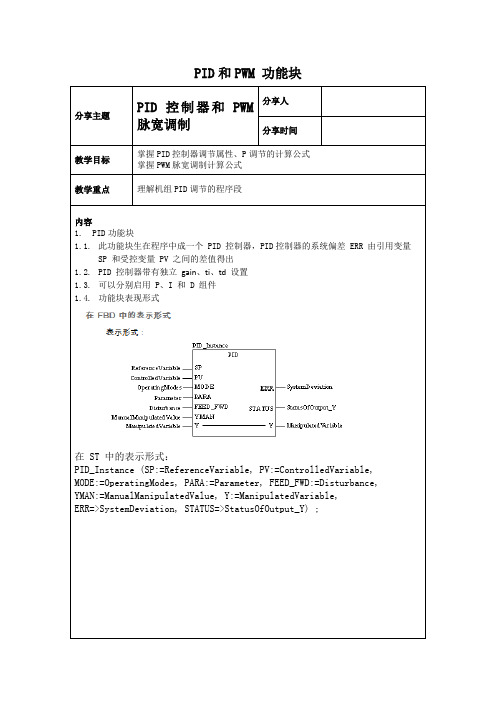
PID和PWM 功能块内容1.PID功能块1.1.此功能块生在程序中成一个 PID 控制器,PID控制器的系统偏差 ERR 由引用变量SP 和受控变量 PV 之间的差值得出1.2.PID 控制器带有独立gain、ti、td设置1.3.可以分别启用 P、I 和 D 组件1.4.功能块表现形式在 ST 中的表示形式:PID_Instance (SP:=ReferenceVariable, PV:=ControlledVariable, MODE:=OperatingModes, PARA:=Parameter, FEED_FWD:=Disturbance, YMAN:=ManualManipulatedValue, Y:=ManipulatedVariable,ERR=>SystemDeviation, STATUS=>StatusOfOutput_Y) ;1.5.参数介绍1.6.计算公式1.7.LCU程序中参数介绍(* 有功调节参数 MAN *)p_mode.en_p:=1;p_mode.en_i:=0;p_mode.en_d:=0;p_para.gain:=5.0;p_para.ti:=t#20s;p_para.td:=t#2s;p_para.ymax:=600.0;(* 建议同有功最大值 *)p_para.ymin:=0.0-p_para.ymax;(* 建议同负有功最大值 *)2.PWM功能块2.1.此功能作用是将模拟量信号转换为数字输出信号2.2.应用举例:关于传动装置驱动器的常规信息,通常二进制传动装置驱动器由两个二进制信号 Y_POS 和 Y_NEG 执行。
在电机上输出 Y_POS 相当于信号"顺时针旋转",输出 Y_NEG 相当于信号"逆时针旋转"2.3.功能块表现形式在 ST 中的表示形式PWM_Instance (X:=InputVariable, R:=ResetMode, PARA:=Parameters,Y_POS=>Positive_X_ValueOutput, Y_NEG=>Negative_X_ValueOutput) ;2.4.参数介绍2.5.LCU程序中的参数P_pwm_para.t_period:=t#5s;(* 调节周期 *)P_pwm_para.t_max:=t#4s;(* 最大脉宽 *)P_pwm_para.t_min:=t#0ms;(* 最小脉宽,此处未用 *)P_pwm_para.up_pos:=600.0;(* 建议同有功最大值 *)P_pwm_para.up_neg:=0.0-P_pwm_para.up_pos;(* 建议同负有功最大值 *) p_up_t_min:=t#400ms;(* 增最小脉宽,注意此处必须为毫秒单位 *)p_down_t_min:=t#400ms;(* 减最小脉宽,注意此处必须为毫秒单位 *)P_MINBAND:=20.0;(*(TIME_TO_REAL(IN:=p_up_t_min)*(P_pwm_para.up_pos-P_pwm_para.up_neg))/(TIME_TO_REAL(IN:=(P_pwm_para.t_max-P_pwm_para.t_min))*p_para.gain)*)2.6.计算公式3.机组LCU程序中PID调节程序(* 脉冲调节 *)P_PID(SP:=P.SET_VALUE,PV:=P.CURRENT_VALUE,MODE:=P_MODE,PARA:=P_PARA, FEED_FWD:=P_FEED_FWD,YMAN:=P_YMAN,Y:=P_Y);P_PWM(X:=P_Y,PARA:=P_PWM_PARA,R:=P_RESET);4.调节脉宽计算公式:增脉宽T_on=t_period*(gain*ERR)/up_pos 备注: (ERR= SP - PV)减脉宽T_on=t_period*(gain*ERR)/up_neg5.正常调节时,调节脉宽按上述计算公式进行调节。
DPU 算法功能块概述(NT6000系统)
科远DCS 控制系统NT6000功能块按其分为以下几组,见表 1-1。
组态软件中的功能模块的外观多采用不同的形状(如圆形、矩形、多边形等)来表示, 从而能从视觉上对不同的功能模块有所区别。
如图 1-1 所示,该模块形状为矩形,①表示模块类型;②表示模块名,该模块名在组态页内唯一,通常由模块类型名和一串随机数字来表示,组态时可以根据需要改变模块名;③是模块输入端;④是模块输出端;⑤表示模块在组态页内的顺序编号,该编号与组态的先后顺序有关,按下组态界面上“顺序”按钮时显示。
图 1-1 典型模块示意图
此外,一些特殊模块还会在右上角有相关数据显示,这些数据因模块类型的不同而表示不同的意义,在涉及到具体的模块时,后续文件中会进行详细介绍。
在后续的模块标记说明表格中的参数属性的相关内容含义如下:
(1)值类型:integer ——整型;real ——浮点数;boolean ——布尔量(开关量);port ——端口型;string ——字符串型;
(2)功能:input ——输入参数;output ——输出参数;property ——属性参数;
(3)连接性:con ——可用 TAG 名访问;no-con ——不可用 TAG 名访问;set ——可在线置值;no-set ——不可在线置值;link-in ——连入参数;link-out ——连出参数;no-link — —不可连接。
单位/范围:specifiable ——表示单位或范围因变量所表示的意义不同而有不同的单位和范围。
表1-1 功能块列表。
15-1-22Siemens Industry Online Support - Automation Service, Automati on Support, Simatic Service, Simatic Support, Technical Support, Tech nical Consulting 自动化技术 > 自动化技术 > 工业自动化系统 SIMATIC > 工业软件 > 运行软件 > Loadable functionblocks > 标准 PID 控制温度PID控制功能块FB58使用入门1 FB58基本特性介绍在标准库(Libraries/Standard Library/PID Control Blocks)中的PID控制块中提供了两个用于温度控制的功能块FB58和FB59。
其中,FB58用于具有连续或脉冲输入信号的执行器的温度控制器,而FB59用于类似于定位电机的执行器的步进温度控制器。
除了基本的功能之外,FB58还提供P ID的参数自整定功能。
PID功能块是纯软件控制器,相关运算数据存放在相应的背景数据块中,对于不同的回路,应该使用不同的背景数据块,否则会导致PID运算混乱的错误。
FB58可以用在仅加热的温度控制回路(例如控制蒸汽的供给量来控制温度),也可以用在仅冷却的温度控制回路(例如控制冷却风扇的频率、或者冷媒的供给量来控制温度)。
如果用于冷却,则回路工作在反作用状态,则需要给比例增益参数GAIN分配一个负数,其他保持不变。
和常规PID功能块(例如FB/SFB41)对比,FB58具有如下特性:提供控制带(Control Zone)功能;控制输出提供脉冲方式;过程值转换增加对温度信号转换(PV_PER*0.1/0.01)方式的支持;参数保存和重新装载;控制器参数自整定功能;设定值变化时的比例作用弱化功能。
2 FB58基本使用2.1 功能块调用在STEP7中,提供了关于FB58和FB59的一个示例项目,其路径如下图所示:图1 FB58/59示例项目该示例项目包含有如下几个示例程序:(1)连续控制器Continuous controller输出类型是连续数值的一类控制器,其中的FB100和DB100是一个模拟的控制对象;(2)脉冲控制Pulse control OB35, OB1输出类型是单个脉冲信号的一类控制,在OB35和OB1中同时调用,其中的FB10 2和DB102是一个模拟的接收脉冲信号的控制对象;(3)脉冲控制Pulse control OB35, OB32输出类型是单个脉冲信号的一类控制,在OB35和OB32中同时调用,其中的FB1 02和DB102是一个模拟的接收脉冲信号的控制对象。
15-1-22Siemens Industry Online Support - Automation Service, Automati on Support, Simatic Service, Simatic Support, Technical Support, Tech nical Consulting 自动化技术 > 自动化技术 > 工业自动化系统 SIMATIC > 工业软件 > 运行软件 > Loadable functionblocks > 标准 PID 控制温度PID控制功能块FB58使用入门1 FB58基本特性介绍在标准库(Libraries/Standard Library/PID Control Blocks)中的PID控制块中提供了两个用于温度控制的功能块FB58和FB59。
其中,FB58用于具有连续或脉冲输入信号的执行器的温度控制器,而FB59用于类似于定位电机的执行器的步进温度控制器。
除了基本的功能之外,FB58还提供P ID的参数自整定功能。
PID功能块是纯软件控制器,相关运算数据存放在相应的背景数据块中,对于不同的回路,应该使用不同的背景数据块,否则会导致PID运算混乱的错误。
FB58可以用在仅加热的温度控制回路(例如控制蒸汽的供给量来控制温度),也可以用在仅冷却的温度控制回路(例如控制冷却风扇的频率、或者冷媒的供给量来控制温度)。
如果用于冷却,则回路工作在反作用状态,则需要给比例增益参数GAIN分配一个负数,其他保持不变。
和常规PID功能块(例如FB/SFB41)对比,FB58具有如下特性:提供控制带(Control Zone)功能;控制输出提供脉冲方式;过程值转换增加对温度信号转换(PV_PER*0.1/0.01)方式的支持;参数保存和重新装载;控制器参数自整定功能;设定值变化时的比例作用弱化功能。
2 FB58基本使用2.1 功能块调用在STEP7中,提供了关于FB58和FB59的一个示例项目,其路径如下图所示:图1 FB58/59示例项目该示例项目包含有如下几个示例程序:(1)连续控制器Continuous controller输出类型是连续数值的一类控制器,其中的FB100和DB100是一个模拟的控制对象;(2)脉冲控制Pulse control OB35, OB1输出类型是单个脉冲信号的一类控制,在OB35和OB1中同时调用,其中的FB10 2和DB102是一个模拟的接收脉冲信号的控制对象;(3)脉冲控制Pulse control OB35, OB32输出类型是单个脉冲信号的一类控制,在OB35和OB32中同时调用,其中的FB1 02和DB102是一个模拟的接收脉冲信号的控制对象。
SFB 41/FB 41“CONT_C”输入参数
“过程物理值”或者“过程物理值百分比”,SP_INT必须使用相应相同的单位;如果使用PV_PER 作为外围设备的实际数值,SP_INT只能使用“-100.0 至 +100.0(%)”作为设定值。
如果设定值是SP_INT是0~10Mpa中的8Mpa,那么需要填写0.8,PV_PER填写硬件外设地址IW XXX;2)受控量通道中的参数应该有相同的单位。
SFB 41/FB 41“CONT_C”输出参数
SFB 42/FB 42“CONT_S”输入参数
1)“设定值通道”和“过程变量通道”中的参数,应该有相同的单位;
2)受控量通道中的参数应该有相同的单位。
SFB 42/FB 42“CONT_S”输出参数
SFB 43/FB 43“PULSEGEN”输入参数
输入参数的数值在块中没有限制。
没有参数检查。
SFB 43/FB 43“PULSEGEN”输出参数。