机械系统的运动简图设计
- 格式:ppt
- 大小:1.96 MB
- 文档页数:44
第1章机械系统的运动简图设计一、基本内容及要求本章学习的主要内容是:(1)平面运动副及其分类;(2)平面机构运动简图的绘制方法;(3)平面机构自由度的计算。
本章的学习要求:1. 掌握各种平面运动副的一般表示方法。
能较熟练看懂教材中的平面机构运动简图。
通过实验初步掌握将实际机构绘制成机构运动简图的技能。
2. 能够识别平面机构运动简图中的复合铰链、局部自由度和最常见的虚约束。
会运用公式计算平面机构的自由度并判断其运动是否确定。
看懂和绘制平面机构运动简图是本章的重点。
复合铰链、局部自由度和虚约束的判断是个难点。
只要求掌握教材中列举的几种实例,不宜在此花费过多时间。
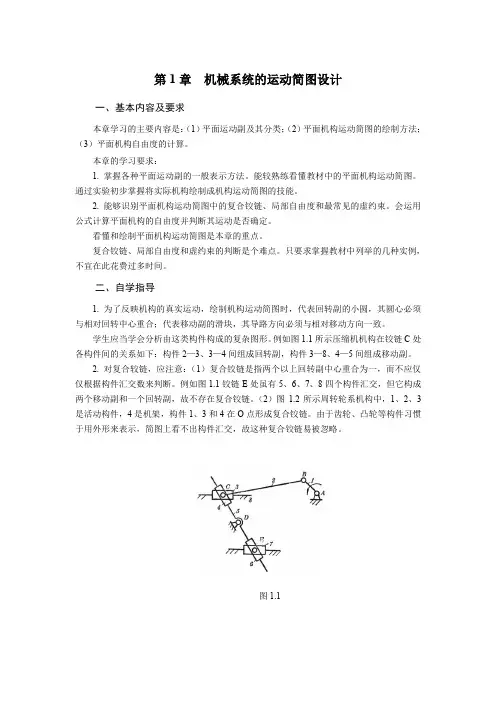
二、自学指导1. 为了反映机构的真实运动,绘制机构运动简图时,代表回转副的小圆,其圆心必须与相对回转中心重合;代表移动副的滑块,其导路方向必须与相对移动方向一致。
学生应当学会分析由这类构件构成的复杂图形。
例如图1.1所示压缩机机构在铰链C处各构件间的关系如下:构件2—3、3—4间组成回转副,构件3—8、4—5间组成移动副。
2. 对复合较链,应注意:(1)复合铰链是指两个以上回转副中心重合为一,而不应仅仅根据构件汇交数来判断。
例如图1.1铰链E处虽有5、6、7、8四个构件汇交,但它构成两个移动副和一个回转副,故不存在复合铰链。
(2)图1.2所示周转轮系机构中,1、2、3是活动构件,4是机架,构件1、3和4在O点形成复合铰链。
由于齿轮、凸轮等构件习惯于用外形来表示,简图上看不出构件汇交,故这种复合铰链易被忽略。
图1.13. 局部自由度在平面机构中主要出现在有滚子的场合。
在计算自由度时,为了防止错算构件数和运动副数,建议将图1.3,a中的滚子及其安装件固联为一整体,如图1.3,b所示。
图1.2 图1.34. 虚约束比较复杂,不要求深入研究,只要求理解和熟悉以下几个实例:(1)由两构件组成多个导路平行的移动副而产生的虚约束;(2)轮系中的对称部分产生的虚约束;(3)在平行四边形机构中加入一个与某边平行且相等的构件造成轨迹重迭而产生的虚约束(其他类型的轨迹重迭往往需要复杂的数学证明,可不深究);(4)“两构件间组成多个轴线重合的回转副”,这类虚约束通常出现在轮系的侧视图中,在运动平面内绘制的机构运动简图不会出现这类虚约束。

机械课程设计运动简图一、教学目标本节课的学习目标包括知识目标、技能目标和情感态度价值观目标。
知识目标要求学生掌握机械运动简图的基本概念、绘制方法和应用。
技能目标要求学生能够独立绘制简单的机械运动简图,并能够分析机械运动的特点。
情感态度价值观目标培养学生的创新意识,提高学生对机械运动的兴趣,培养学生的团队合作精神。
二、教学内容本节课的教学内容主要包括机械运动简图的基本概念、绘制方法和应用。
首先,介绍机械运动简图的概念,让学生了解机械运动简图的作用和意义。
然后,讲解机械运动简图的绘制方法,包括图元的表示、运动轨迹的表示和运动规律的表示等。
最后,通过实例分析,让学生了解机械运动简图在实际工程中的应用。
三、教学方法为了激发学生的学习兴趣和主动性,本节课将采用多种教学方法。
首先,采用讲授法,讲解机械运动简图的基本概念和绘制方法。
其次,采用讨论法,让学生分组讨论机械运动简图的应用实例,增强学生的思考能力。
再次,采用案例分析法,分析机械运动简图在实际工程中的应用,提高学生的实际操作能力。
最后,采用实验法,让学生动手绘制机械运动简图,培养学生的实践能力。
四、教学资源为了支持教学内容和教学方法的实施,本节课将选择和准备适当的教学资源。
教材方面,将使用《机械运动简图》教材,为学生提供基础的理论知识。
参考书方面,将推荐《机械运动简图教程》等参考书籍,为学生提供更多的学习资料。
多媒体资料方面,将制作机械运动简图的PPT和教学视频,为学生提供直观的学习体验。
实验设备方面,将准备绘图板、彩笔等绘图工具,以及相关的机械模型,为学生提供实践操作的机会。
五、教学评估本节课的教学评估将采用多元化的评估方式,以全面、客观、公正地评价学生的学习成果。
评估主要包括平时表现、作业和考试三个部分。
平时表现主要考察学生的课堂参与度、提问回答和团队合作等情况,占总评的30%。
作业主要包括绘图练习和思考题,占总评的30%。
考试为闭卷考试,主要包括选择题、填空题和应用题,占总评的40%。
机构运动简图设计的内容、方法和步骤机械产品的设计是为了满足产品的某种功能要求。
机构运动简图设计是机械产品设计的第一步,其设计内容包括选定或开发机构构型并加以巧妙组合,同时进行各个组成机构的尺度综合,使此机构系统完成某种功能要求。
机构运动简图设计的好坏是决定机械产品的质量、水平的高低、性能的优劣和经济效益好坏的关键性的一步。
机构运动简图的设计,主要包括下列内容:1)功能原理方案的设计和构思根据机械所要实现的功能,采用有关的工作原理,并由此出发设计和构思出工艺动作过程,这就是功能原理方案设计。
灵巧的功能原理是创造新机械的出发点和归宿。
2)机械运动方案的设计根据功能原理方案中提出的工艺动作及各个动作的运动规律要求,选择相应的若干个执行机构,并按一定的顺序把它们组成机构运动示意图。
机械运动方案的设计是机构运动简图设计中的型综合。
3)机构运动简图的尺度综合根据机械运动方案中各执行机构工艺动作的运动规律和机械运动循环图的要求,通过分析、计算、确定机构运动简图中各机构的运动学尺寸。
在进行尺度综合时,应同时考虑其运动条件和动力条件,否则不利于设计性能良好的新机械。
机构运动简图设计的一般程序:1)机械总功能的分解将机械需要完成的工艺动作过程进行分解,即将总功能分解成多个功能元,找出各功能元的运动规律和动作过程;2)功能原理方案确定将总功能分解成多个功能元之后,对功能元进行求解,即将需要的执行动作,用合适的执行机构来实现。
将功能元的解进行组合、评价、选优,从而确定其功能原理方案,即机构系统简图。
为了得到能实现功能元的机构,在设计中,需要对执行构件的基本运动和机构的基本功能有一全面的了解。
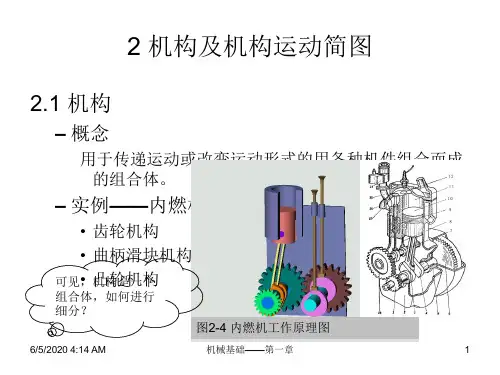
ⅰ)执行机构基本运动常用机构执行构件的运动形式有回转运动、直线运动和曲线运动三种,回转和直线运动是最简单的机械运动形式。
按运动有无往复性和间歇性,基本运动的形式如表1所示。
表1 执行构件的基本运动形式机构的功能是指机构实现运动变换和完成某种功用的能力。