2008年振动力学期末考试试题
- 格式:doc
- 大小:437.00 KB
- 文档页数:9
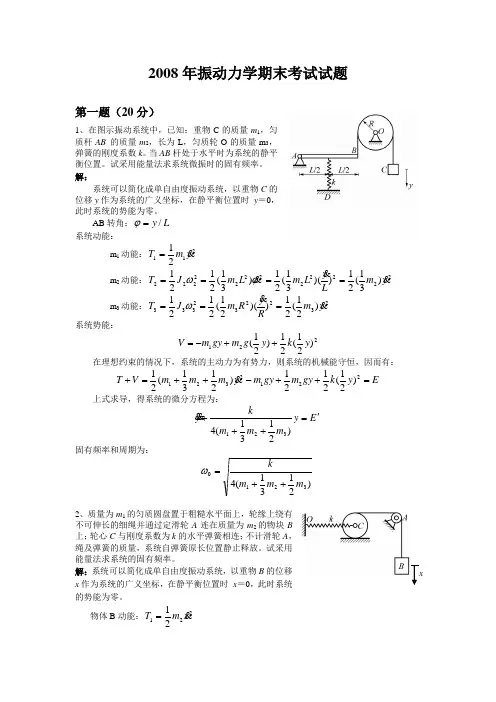
2008年振动力学期末考试试题第一题(20分)1、在图示振动系统中,已知:重物C 的质量m 1,匀质杆AB 的质量m 2,长为L ,匀质轮O 的质量m 3,弹簧的刚度系数k 。
当AB 杆处于水平时为系统的静平衡位置。
试采用能量法求系统微振时的固有频率。
解:系统可以简化成单自由度振动系统,以重物C 的位移y 作为系统的广义坐标,在静平衡位置时 y =0,此时系统的势能为零。
AB 转角:L y /=ϕ 系统动能:m 1动能:21121y m T =m 2动能:222222222222)31(21))(31(21)31(2121y m L y L m L m J T ====ϕω m 3动能:232232333)21(21))(21(2121ym R y R m J T ===ω 系统势能:221)21(21)21(y k y g m gy m V ++-=在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而有:E y k gy m gy m ym m m V T =++-++=+2212321)21(2121)2131(21 上式求导,得系统的微分方程为:E y m m m ky'=+++)2131(4321固有频率和周期为:)2131(43210m m m k++=ω2、质量为m 1的匀质圆盘置于粗糙水平面上,轮缘上绕有不可伸长的细绳并通过定滑轮A 连在质量为m 2的物块B 上;轮心C 与刚度系数为k 的水平弹簧相连;不计滑轮A ,绳及弹簧的质量,系统自弹簧原长位置静止释放。
试采用能量法求系统的固有频率。
解:系统可以简化成单自由度振动系统,以重物B 的位移x 作为系统的广义坐标,在静平衡位置时 x =0,此时系统的势能为零。
物体B 动能:22121x m T =轮子与地面接触点为速度瞬心,则轮心速度为x v c 21=,角速度为x R21=ω,转过的角度为x R21=θ。
轮子动能: )83(21)41)(21(21)41(212121212221212212x m x RR m xm J v m T c =+=+=ω 系统势能:22228)21(21)(2121x kxR R k R k kx V c ====θ 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,有:E x kxm m V T =++=+22218)83(21上式求导得系统的运动微分方程:083221=++x m m kx固有频率为:210832m m k+=ω第二题(20分)1、在图示振动系统中,重物质量为m ,外壳质量为2m ,每个弹簧的刚度系数均为k 。
中南大学考试试卷2005 - 2006学年上学期时间门o分钟《机械振动基础》课程32学时1.5学分考试形式:闭卷专业年级:机械03级总分100分,占总评成绩70 %注:此页不作答题纸,请将答案写在答题纸上一、填空题(本题15分,每空1分)1>不同情况进行分类,振动(系统)大致可分成,()和非线性振动;确定振动和();()和强迫振动;周期振动和();()和离散系统。
2、在离散系统屮,弹性元件储存(),惯性元件储存(),()元件耗散能量。
3、周期运动的最简单形式是(),它是时间的单一()或()函数。
4、叠加原理是分析()的振动性质的基础。
5、系统的固有频率是系统()的频率,它只与系统的()和()有关,与系统受到的激励无关。
二、简答题(本题40分,每小题10分)1、简述机械振动的定义和系统发生振动的原因。
(10分)2、简述振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。
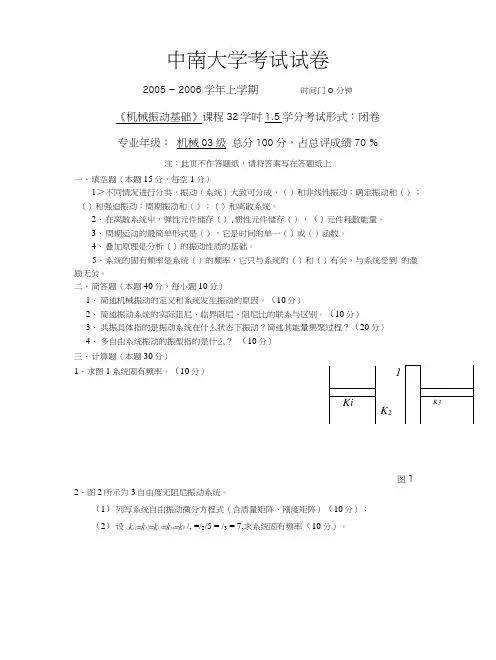
(10分)3、共振具体指的是振动系统在什么状态下振动?简述其能量集聚过程?(20分)4、多自由系统振动的振型指的是什么?(10分)三、计算题(本题30分)图1 2、图2所示为3自由度无阻尼振动系统。
(1)列写系统自由振动微分方程式(含质量矩阵、刚度矩阵)(10分);(2)设k t[=k t2=k t3=k t4=k9 /, =/2/5 = /3 = 7,求系统固有频率(10 分)。
13 Kt3四、证明题(本题15分)对振动系统的任一位移{兀},证明Rayleigh商R(x)=⑷严⑷满足材 < 尺⑴ < 忒。
{x}\M\{x}这里,[K]和[M]分别是系统的刚度矩阵和质量矩阵,®和①,分别是系统的最低和最高固有频率。
(提示:用展开定理{x} = y{M} + y2{u2}+……+ y n{u n})3 •简述无阻尼单自由度系统共振的能量集聚过程。
(10 分) 4.简述线性多自由度系统动力响应分析方法。
(10 分)中南大学考试试卷2006 - 2007学年 上 学期 时间120分钟机械振动 课程 32 学时 2 学分 考试形式:闭卷专业年级: 机械04级 总分100分,占总评成绩 70%注:此页不作答题纸,请将答案写在答题纸上一、填空(15分,每空1分)1. 叠加原理在(A )中成立;在一定的条件下,可以用线性关系近似(B ) o2. 在振动系统中,弹性元件储存(C ),惯性元件储存(D ) , (E )元件耗散 能量。

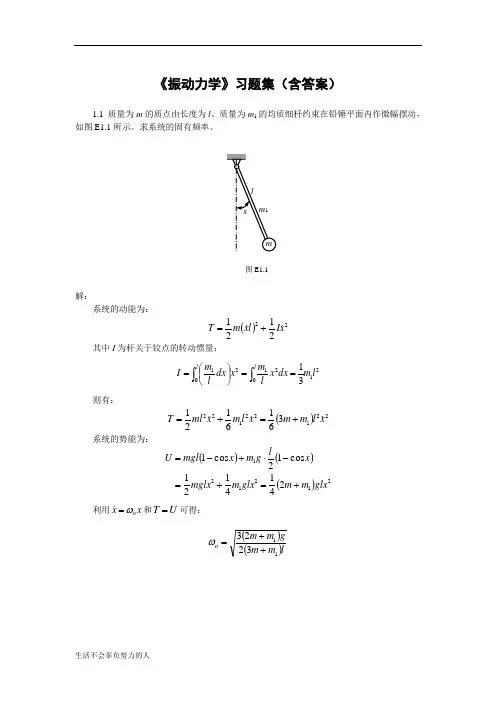
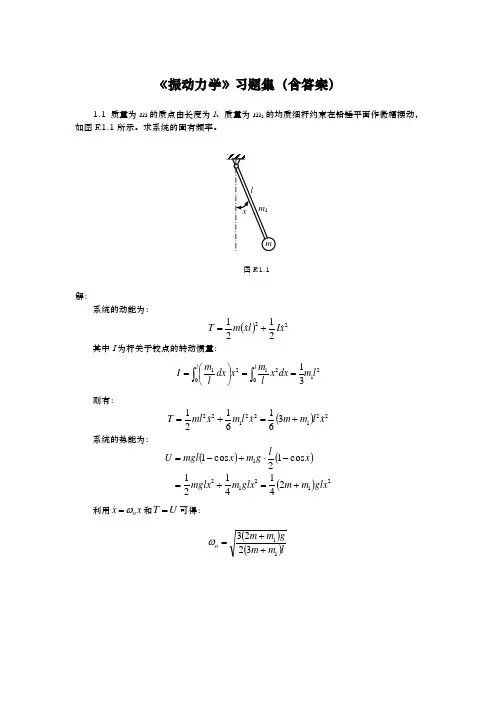
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解: 系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得: ()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解: 系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
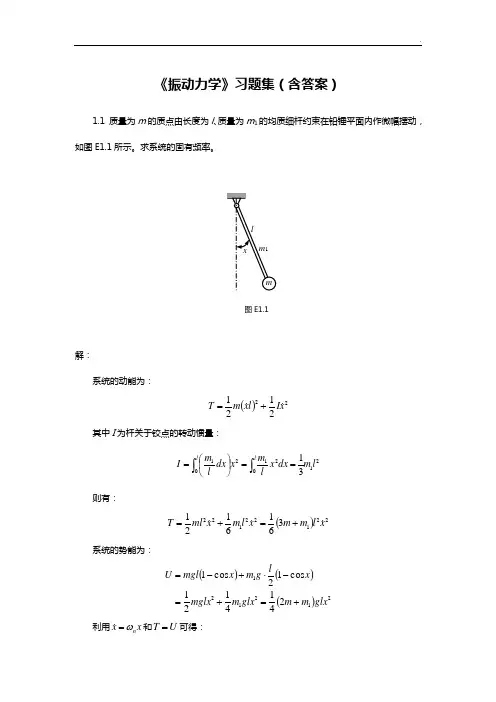
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解:系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得:()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得:()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解:系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222121212121θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
物理机械振动考试题及答案一、单项选择题(每题3分,共30分)1. 简谐运动的振动周期与振幅无关,与以下哪个因素有关?A. 质量B. 弹簧常数C. 初始位移D. 初始速度答案:B2. 阻尼振动中,振幅逐渐减小的原因是:A. 摩擦力B. 重力C. 弹力D. 空气阻力答案:A3. 以下哪个量描述了简谐运动的振动快慢?A. 振幅B. 周期C. 频率D. 相位答案:C4. 两个简谐运动的合成,以下哪个条件可以产生拍现象?A. 频率相同B. 频率不同C. 振幅相同D. 相位相反答案:B5. 以下哪个量是矢量?A. 位移B. 速度C. 加速度D. 以上都是答案:D6. 单摆的周期与以下哪个因素无关?A. 摆长B. 摆球质量C. 重力加速度D. 摆角答案:B7. 以下哪个量描述了简谐运动的能量?A. 振幅C. 频率D. 相位答案:A8. 以下哪个因素会影响单摆的周期?A. 摆长B. 摆球质量C. 摆角D. 重力加速度答案:A9. 阻尼振动中,振幅减小到原来的1/e时,经过的时间为:A. 1/2TB. TC. 2T答案:C10. 以下哪个现象不是简谐运动?A. 弹簧振子B. 单摆C. 弹簧振子的振幅逐渐减小D. 单摆的振幅逐渐减小答案:C二、填空题(每题4分,共20分)11. 简谐运动的周期公式为:T = 2π√(____/k),其中m为质量,k为弹簧常数。
答案:m12. 单摆的周期公式为:T = 2π√(L/g),其中L为摆长,g为重力加速度。
答案:L13. 阻尼振动的振幅公式为:A(t) = A0 * e^(-γt),其中A0为初始振幅,γ为阻尼系数,t为时间。
答案:A014. 简谐运动的频率公式为:f = 1/T,其中T为周期。
答案:1/T15. 简谐运动的相位公式为:φ = ωt + φ0,其中ω为角频率,t 为时间,φ0为初始相位。
答案:ωt + φ0三、计算题(每题10分,共50分)16. 一个质量为2kg的物体,通过弹簧连接在墙上,弹簧的弹簧常数为100N/m。
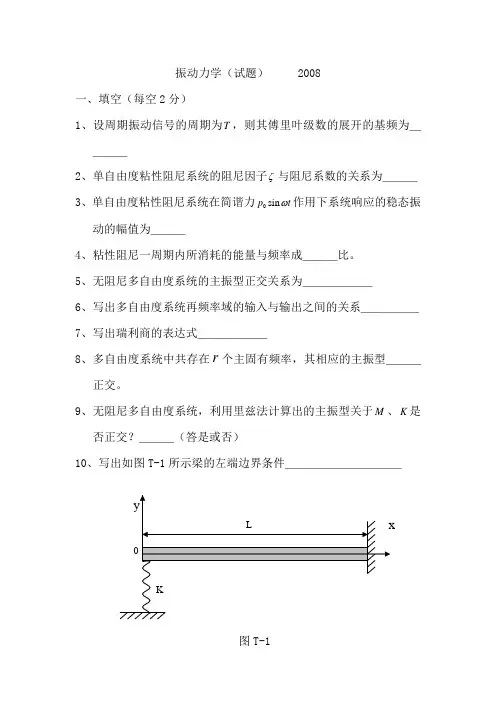
振动力学(试题) 2008一、填空(每空2分)1、设周期振动信号的周期为T,则其傅里叶级数的展开的基频为____2、单自由度粘性阻尼系统的阻尼因子ζ与阻尼系数的关系为___3、单自由度粘性阻尼系统在简谐力0sinp tω作用下系统响应的稳态振动的幅值为___4、粘性阻尼一周期内所消耗的能量与频率成___比。
5、无阻尼多自由度系统的主振型正交关系为______6、写出多自由度系统再频率域的输入与输出之间的关系_____7、写出瑞利商的表达式______8、多自由度系统中共存在r个主固有频率,其相应的主振型___正交。
9、无阻尼多自由度系统,利用里兹法计算出的主振型关于M、K是否正交?___(答是或否)10、写出如图T-1所示梁的左端边界条件__________图T-1二、(20分)系统如图T-2所示,杆AB 为刚性、均质,长度为L ,总质量为m ,弹簧刚度为k ,阻尼系数为c 。
求系统的固有频率及阻尼因子。
三、系统如图T-3所示。
求系统的固有频率与主振型。
图T-23图T-3四、五、(20分)简支梁如图T-5所示,弹性模量为E ,质量密度为 ,横截面积为A ,截面惯性矩为J 。
求梁在中央受集中弯矩M 下的响应。
(假设梁的初始状态为零)图T-5答案一、填空(每空2分)1、周期振动信号的周期为T ,则其傅里叶级数的展开的基频为2/T π2、单自由度粘性阻尼系统的阻尼因子ζ与阻尼系数的关系为ζ=3、单自由度粘性阻尼系统在简谐力0sin p t ω作用下系统响应的稳态振动的幅值为0p B k =4、粘性阻尼一周期内所消耗的能量与频率成_正_比。
5、无阻尼多自由度系统的主振型正交关系为 加权(M,K )正交:0()()T T i j pi i j M M i j ϕϕ≠⎧=⎨=⎩0()()T Ti j pi i j K K i j ϕϕ≠⎧=⎨=⎩ 6、写出多自由度系统在频率域的输入与输出之间的关系()()()x H P ωωω=其中21()()H K M i C ωωω-=-+7、写出瑞利商的表达式 ()T T X KXR X X MX=8、多自由度系统中共存在r 个重固有频率,其相应的主振型_?加权(M,K )正交。
振动试验试题及答案一、单项选择题(每题2分,共20分)1. 振动试验中,以下哪个参数是不需要测量的?A. 频率B. 加速度C. 温度D. 时间答案:C2. 振动试验的目的是什么?A. 测试产品的重量B. 测试产品的耐热性C. 测试产品的耐振性D. 测试产品的耐压性答案:C3. 在振动试验中,通常使用哪种类型的振动?A. 随机振动B. 正弦振动C. 谐振振动D. 所有以上答案:D4. 振动试验中,加速度的单位是什么?A. 米/秒²B. 牛顿C. 帕斯卡D. 瓦特答案:A5. 振动试验中,频率的单位是什么?A. 赫兹B. 米/秒C. 牛顿D. 瓦特答案:A6. 以下哪种振动试验不适用于电子产品?A. 正弦振动试验B. 随机振动试验C. 冲击试验D. 跌落试验答案:D7. 振动试验的频率范围通常是?A. 5Hz-500HzB. 1Hz-100HzC. 100Hz-1000HzD. 500Hz-5000Hz答案:A8. 振动试验的加速度范围通常是?A. 0.1g-10gB. 1g-100gC. 10g-1000gD. 100g-10000g答案:B9. 在振动试验中,什么是“g”?A. 重力加速度B. 重力的单位C. 振动的频率D. 振动的振幅答案:A10. 振动试验的持续时间通常由什么决定?A. 试验设备的能力B. 被测试产品的重量C. 被测试产品的耐振性D. 试验标准的规定答案:D二、多项选择题(每题3分,共15分)1. 振动试验可以模拟以下哪些环境条件?A. 运输过程中的振动B. 地震C. 操作过程中的振动D. 所有以上答案:D2. 在振动试验中,哪些因素会影响试验结果?A. 试验设备的精度B. 试验环境的温度C. 被测试产品的材料D. 被测试产品的结构答案:A, B, C, D3. 以下哪些是振动试验的类型?A. 正弦振动试验B. 随机振动试验C. 冲击试验D. 跌落试验答案:A, B4. 振动试验中,哪些参数需要记录?A. 频率B. 加速度C. 时间D. 振幅答案:A, B, C5. 振动试验中,以下哪些因素需要控制?A. 试验的频率B. 试验的加速度C. 试验的时间D. 试验的环境答案:A, B, C, D三、判断题(每题1分,共10分)1. 振动试验只适用于机械产品。

《振动力学》习题集(含答案)质量为 m 的质点由长度为 l 、质量为 m 1 的均质细杆约束在铅锤平面内作微幅摆动,如图所示。
求系统的固有频率。
lxm 1m图解:系统的动能为:T1m xl 21 Ix 222其中 I 为杆关于铰点的转动惯量:l m 1 2lm 1 21 2Ildx xlx dxm 1l3则有:T1 ml2 x 2 1m 1l 2 x213m m 1 l 2 x 226 6系统的势能为:U mgl 1 cosx m 1gl 1 cosx21mglx 21m 1glx 2 1 2m m 1 glx 224 4利用 x n x 和T U 可得:n3 2m m 1 g 2 3m m 1 l质量为 m、半径为 R的均质柱体在水平面上作无滑动的微幅滚动,在CA=a的 A 点系有两根弹性刚度系数为k 的水平弹簧,如图所示。
求系统的固有频率。
k A kaCR图解:如图,令为柱体的转角,则系统的动能和势能分别为:T 1I B21mR2 1 mR2 23 mR2 2 2224U 21k R a2k R a 2 22利用n和 T U可得:4k R a2R a4kn3mR2R3m转动惯量为 J 的圆盘由三段抗扭刚度分别为k 1 , k 2 和 k 3 的轴约束,如图所示。
求系统的固有频率。
Jk 1 k 2图解:系统的动能为:T1 J2 2k 2 和 k 3 相当于串联,则有:k 323 ,k2 2k3 3以上两式联立可得:2k 3 ,3k 2k 3k 3k 2k 2系统的势能为:U1k 1 21k 2 221k 3 32 1 k 1 k 2 k 3 k 2k 3 2222 2k 2 k 3 利用n 和 TU 可得:nk 2k 3 k 1 k 2 k 3J k 2 k 3在图所示的系统中,已知k i i 1,2,3 , m, a 和 b ,横杆质量不计。
求固有频率。
x1k1k 2F1bmga a bbk3m图a x0bx2xmg aF2amgb答案图解:对 m进行受力分析可得:mg k3 x3mg ,即 x3k3如图可得:x1F1mgb,x2F2mgak1k2 a b k2a b k1a x2x1a2k1b2 k2x0 x1x x1 a b a b 2 k1k2mgx x0x3a2k1b2 k21mg1mg a b 2 k1k2k3k0则等效弹簧刚度为:2k1k2k3 k e a b2k1k3 b2k2k32a ab k1k2则固有频率为:k e k1k2k3 a b 2nm k1k2 a b 2k3 k1a2k2b2m质量 m1在倾角为的光滑斜面上从高h 处滑下无反弹碰撞质量m2,如图所示。
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解: 系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得: ()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解: 系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
08级物理学期末试卷(B )参考答案一.填空:每空2分,共38分1.^^7260j i V -=→, ^^7230j i a -=→2.dt dV a =τ 切线 RV a n 2= 圆心22τa a a n+= τθa a tg n= 3.^^cos sin j t b i t a ωωωω+- 4.角动量增量 5.线性恢复力, km π2 6.合外力等于零,外力的矢量合所作的功和非保内力的功等于零,合外力矩等于零,惯性。
7.0mv 竖直向下8.2221ωρϖA =二.选择:每题2分,共20分CDCCBDBCCB三.计算题:42分1.解:取质点为研究对象,由加速度定义有t dtdv a 4==(一维可用标量式)tdt dv 4=⇒ 2分由初始条件有:⎰⎰=tvtdt dv 04得: 22t v = 2分由速度定义得:22t dtdxv ==dt t dx 22=⇒ 2分由初始条件得:dt t dx tx⎰⎰=02102即10322+=t x m 4分 2.解:受力分析:A m :重力g m A,桌面支持力1N ,绳的拉力1T ;B m :重力g m B,绳的拉力2T ; c m :重力g m c,轴作用力2N , c m 绳作用力'1T 、'2T⎪⎪⎩⎪⎪⎨⎧=-=-=α2122121''R m R T R T a m T g m a m TcB B A 及11'T T =,22'T T =,αR a = 4分解得:⎪⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎪⎨⎧++⎪⎭⎫⎝⎛+=++=++=c B A B c A cB A B A c BA B m m m gm m m T m m m g m m T m m m g m a 2121212121 4分讨论:不计c m 时,⎪⎪⎩⎪⎪⎨⎧+==+=B A B A BA B m m gm m T T m m g m a 21 2分(即为质点情况)3.解:⑴研究对象:1m 、2m⑵受力分析:1m 、2m 各受两个力,即重力C图 4-9图 4-10gBB2N及绳拉力,如图2-7。
物理机械振动考试题及答案一、选择题1. 简谐振动的频率与振幅无关,这是由什么决定的?A. 振子的质量B. 振子的弹性系数C. 振子的阻尼D. 振子的初始条件答案:B2. 在阻尼振动中,振幅随时间如何变化?A. 保持不变B. 逐渐减小C. 逐渐增大D. 先增大后减小答案:B3. 以下哪个不是简谐振动的特点?A. 周期性B. 振幅不变C. 频率恒定D. 振子质量不变答案:D4. 什么是共振现象?A. 振子的振动频率等于系统固有频率时的现象B. 振子的振幅达到最大时的现象C. 振子的振动频率等于外部驱动频率时的现象D. 振子的振动频率等于外部阻尼频率时的现象答案:A5. 以下哪个公式描述了简谐振动的位移?A. \( x = A \sin(\omega t + \phi) \)B. \( x = A \cos(\omega t + \phi) \)C. \( x = A \tan(\omega t + \phi) \)D. \( x = A \sec(\omega t + \phi) \)答案:B二、填空题6. 一个物体在水平面上做简谐振动,其振动周期 \( T \) 与振动频率 \( f \) 的关系是 \[ T = \frac{1}{f} \]。
7. 阻尼振动中,振幅随时间的衰减速度与振子的________成正比。
8. 共振现象中,振子的振动频率等于系统的________频率。
9. 简谐振动的位移公式中,\( \omega \) 表示________,\( \phi \) 表示________。
10. 阻尼振动的振幅随时间的衰减可以表示为 \( A(t) = A_0 e^{-\alpha t} \),其中 \( \alpha \) 表示________。
三、简答题11. 简述什么是阻尼振动,并说明其振幅随时间的变化趋势。
答案:阻尼振动是指在振动过程中,由于存在阻力(如空气阻力、摩擦力等),振子的振动能量逐渐减小,导致振幅逐渐减小的振动。
振动力学考题集[]1、四个振动系统中,自由度为无限大的是()。
A. 单摆;B. 质量-弹簧;C. 匀质弹性杆;D. 无质量弹性梁;2、两个分别为c1、c2的阻尼原件,并连后其等效阻尼是()。
A. c1+c2;B. c1c2/(c1+c2);C. c1-c2;D. c2-c1;3、()的振动系统存在为0的固有频率。
A. 有未约束自由度;B. 自由度大于0;C. 自由度大于1;D. 自由度无限多;4、多自由度振动系统中,质量矩阵元素的量纲应该是()。
A. 相同的,且都是质量;B. 相同的,且都是转动惯量;C. 相同的,且都是密度;D. 可以是不同的;5、等幅简谐激励的单自由度弹簧-小阻尼-质量振动系统,激励频率()固有频率时,稳态位移响应幅值最大。
A. 等于;B. 稍大于;C. 稍小于;D. 为0;6、自由度为n的振动系统,且没有重合的固有频率,其固有频率的数目(A )。
A. 为n;B. 为1;C. 大于n;D. 小于n;7、无阻尼振动系统两个不同的振型u(r)和u(s),u(r)T Mu(s)的值一定()。
A. 大于0;B. 等于0;C. 小于0;D. 不能确定;8、无阻尼振动系统的某振型u(r),u(r)T Ku(r)的值一定()。
A. 大于0;B. 等于0;C. 小于0;D. 不能确定;9、如果简谐激励力作用在无约束振动系统的某集中质量上,当激励频率为无限大时,该集中质量的稳态位移响应一定()。
A. 大于0;B. 等于0;C. 为无穷大;D. 为一常数值;10、相邻固有频率之间的间隔呈近似无限等差数列的振动系统是()。
A. 杆的纵向振动;B. 弦的横向振动;C. 一般无限多自由度系统;D. 梁的横向振动;11、两个刚度分别为k1、k2串连的弹簧,其等效刚度是()。
A. k1+k2;B. k1k2/(k1+k2);C. k1-k2;D. k2-k1;12、无阻尼振动系统两个不同的振型u(r)和u(s),u(r)T Ku(s)的值一定()。
2008年振动力学期末考试试题第一题(20分)1、在图示振动系统中,已知:重物C 的质量m 1,匀质杆AB 的质量m 2,长为L ,匀质轮O 的质量m 3,弹簧的刚度系数k 。
当AB 杆处于水平时为系统的静平衡位置。
试采用能量法求系统微振时的固有频率。
解:系统可以简化成单自由度振动系统,以重物C 的位移y 作为系统的广义坐标,在静平衡位置时 y =0,此时系统的势能为零。
AB 转角:L y /=ϕ 系统动能:m 1动能:21121y m T =m 2动能:222222222222)31(21))(31(21)31(2121y m L y L m L m J T ====ϕω m 3动能:232232333)21(21))(21(2121ym R y R m J T ===ω 系统势能:221)21(21)21(y k y g m gy m V ++-=在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而有:E y k gy m gy m ym m m V T =++-++=+2212321)21(2121)2131(21 上式求导,得系统的微分方程为:E y m m m ky'=+++)2131(4321固有频率和周期为:)2131(43210m m m k++=ω2、质量为m 1的匀质圆盘置于粗糙水平面上,轮缘上绕有不可伸长的细绳并通过定滑轮A 连在质量为m 2的物块B 上;轮心C 与刚度系数为k 的水平弹簧相连;不计滑轮A ,绳及弹簧的质量,系统自弹簧原长位置静止释放。
试采用能量法求系统的固有频率。
解:系统可以简化成单自由度振动系统,以重物B 的位移x 作为系统的广义坐标,在静平衡位置时 x =0,此时系统的势能为零。
物体B 动能:22121x m T =轮子与地面接触点为速度瞬心,则轮心速度为x v c 21=,角速度为x R21=ω,转过的角度为x R21=θ。
轮子动能: )83(21)41)(21(21)41(212121212221212212x m x RR m xm J v m T c =+=+=ω 系统势能:22228)21(21)(2121x kxR R k R k kx V c ====θ 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,有:E x kxm m V T =++=+22218)83(21上式求导得系统的运动微分方程:083221=++x m m kx固有频率为:210832m m k+=ω第二题(20分)1、在图示振动系统中,重物质量为m ,外壳质量为2m ,每个弹簧的刚度系数均为k 。
设外壳只能沿铅垂方向运动。
采用影响系数方法:(1)以x 1和x 2为广义坐标,建立系统的微分方程;(2)求系统的固有频率。
解:系统为二自由度系统。
当x1=1,x2=0时,有:k11=2k ,k21=-2k 当x2=1,x2=1时,有:k22=4k ,k12=-2k 因此系统刚度矩阵为:⎥⎦⎤⎢⎣⎡--k k k k 4222 系统质量矩阵为:⎥⎦⎤⎢⎣⎡m m 200 系统动力学方程为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡0042222002121x x k k k k xx m m频率方程为:024222)(Δ22=----=ωωωm k kkm k 解出系统2个固有频率:m k )22(21-=ω,mk )22(22+=ω2、在图示振动系统中,物体A 、B 的质量均为m ,弹簧的刚度系数均为k ,刚杆AD 的质量忽略不计,杆水平时为系统的平衡位置。
采用影响系数方法,试求:(1)以x 1和x 2为广义坐标,求系统作微振动的微分方程;(2)系统的固有频率方程。
解:系统可以简化为二自由度振动系统,以物体A 和B 在铅垂方向的位移x 1和x 2为系统的广义坐标。
当x1=1,x2=0时,AD 转角为L 3/1=θ,两个弹簧处的弹性力分别为L k θ和L k θ2。
对D 点取力矩平衡,有:kL k 91411=;另外有kL k -=21。
同理,当x2=1,x2=1时,可求得:kL k =22,kL k -=12 因此,系统刚度矩阵为:⎥⎥⎦⎤⎢⎢⎣⎡--kL kL kL kL 914 系统质量矩阵为:⎥⎦⎤⎢⎣⎡m m 00 系统动力学方程为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡--+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡00914002121x x kL kL kL kL x x m m频率方程为:091422=----ωωm kL kLkL m kL即:0523922242=+-L k kmL m ωω第三题(20分)在图示振动系统中,已知:物体的质量m 1、m 2及弹簧的刚度系数为k 1、k 2、k 3、k 4。
(1)采用影响系数方法建立系统的振动微分方程;(2)若k 1= k 3=k 4= k 0,又k 2=2 k 0,求系统固有频率;(3)取k 0 =1,m 1=8/9,m 2 =1,系统初始位移条件为x 1(0)=9和x 2(0)=0,初始速度都为零,采用模态叠加法求系统响应。
解:(1)系统可以简化为二自由度振动系统。
当x1=1,x2=0时,有:k11=k1+k2+k4,k21=-k2x x当x2=1,x2=1时,有:k22=k2+k3,k12=-k2。
因此,系统刚度矩阵为:⎥⎦⎤⎢⎣⎡+--++3222421k k k k k k k系统质量矩阵为:⎥⎦⎤⎢⎣⎡2100m m 系统动力学方程为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+--+++⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡00002132224212121x x k k k k k k k x xm m(2)当0431k k k k ===,022k k =时,运动微分方程用矩阵表示为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡003224002100002121x x k k k k x xm m 频率方程为:04)3)(4(20220210=---k m k m k ωω 08)43(202021421=++-k k m m m m ωω求得:)168943(22221212121021m m m m m m m m k +--+⋅=ω)168943(22221212121022m m m m m m m m k +-++⋅=ω(3)当k 0=1,m 1=8/9,m 2 =1时,系统质量阵:⎥⎥⎦⎤⎢⎢⎣⎡=10098M 系统刚度阵:⎥⎦⎤⎢⎣⎡--=3224K固有频率为:2321=ω,622=ω 主模态矩阵为:⎥⎥⎦⎤⎢⎢⎣⎡-=112343Φ 主质量阵:⎥⎥⎦⎤⎢⎢⎣⎡==30023M ΦΦM Tp主刚度阵:⎥⎥⎦⎤⎢⎢⎣⎡==180049K ΦΦK Tp 模态空间初始条件:⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-44)0()0()0()0(21121x x q q Φ, ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-00)0()0()0()0(21121xx q q Φ 模态响应:01211=+q q ω ,02222=+q q ω即:t t q 11cos 4)(ω=,t t q 22cos 4)(ω-=因此有:⎩⎨⎧-+=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡t t t t t q t q t x t x 21212121cos 4cos 4cos 6cos 3)()()()(ωωωωΦ第四题(20分)一匀质杆质量为m ,长度为L ,两端用弹簧支承,弹簧的刚度系数为k 1和k 2。
杆质心C 上沿x 方向作用有简谐外部激励t ωsin 。
图示水平位置为静平衡位置。
(1)以x 和θ为广义坐标,采用影响系数方法建立系统的振动微分方程;(2)取参数值为m=12,L =1,k 1 =1,k 2 =3,求出系统固有频率;(2)系统参数仍取前值,试问当外部激励的频率ω为多少时,能够使得杆件只有θ方向的角振动,而无x 方向的振动? 解:(1)系统可以简化为二自由度振动系统,选x 、θ为广义坐标,x 为质心的纵向位移,θ 为刚杆的角位移,如图示。
当1=x 、0=θ时:2111k k k +=,2)(1221L k k k -= 当0=x 、1=θ时:2)(1211L k k k -=,4)(22122L k k k +=因此,刚度矩阵为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--+=4)(2)(2)(221121221L k k Lk k L k k k k K 质量矩阵为:⎥⎥⎦⎤⎢⎢⎣⎡=212100mL m M 系统动力学方程:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--++⎥⎦⎤⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡0sin 4)(2)(2)(121002*********t x L k k L k k L k k k k x mL m ωθθ(2)当m=12,L =,k 1 =1,k 2 =3时,系统动力学方程为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡0sin 111410012t x x ωθθ频率方程为:0111124202=--ωω即:0316122040=+-ωω求得:67420±=ω (3)令t x x ωθθsin ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡,代入上述动力学方程,有:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡--0111112422θωωx 由第二行方程,解得21ωθ--=x,代入第一行的方程,有:21k ⋅⋅θ 1=1)124(122---=ωωx ,]1)124[(2---=ωθ 要使得杆件只有θ方向的角振动,而无x 方向的振动,则需0=x ,因此1=ω。
第五题(20分)如图所示等截面悬臂梁,梁长度为L ,弹性模量为E ,横截面对中性轴的惯性矩为I ,梁材料密度为ρ。
在梁的a 位置作用有集中载荷)(t F 。
已知梁的初始条件为:)()0,(1x f x y =,)()0,(2x f x y = 。
(1)推导梁的正交性条件;(2)写出求解梁的响应),(t x y 的详细过程。
(假定已知第i 阶固有频率为i ω,相应的模态函数为)(x i φ,∞=~1i )提示:梁的动力学方程为:),(]),([222222t x f ty S x t x y EI x =∂∂+∂∂∂∂ρ,其中)()(),(a x t F t x f -=δ,δ为δ函数。
解:(1)梁的弯曲振动的动力学方程为:0),(]),([222222=∂∂+∂∂∂∂tt x y S x t x y EI x ρ ),(t x y 可写为:)sin()()()(),(θωφφ+==t a x t q x t x y代入梁的动力学方程,有:φρωφS EI 2)(=''''设与i ω、j ω对应有i φ、j φ,有: i i i S EI φρωφ2)(=''''(1)j j j S EI φρωφ2)(=''''(2)式(1)两边乘以j φ并沿梁长对x 积分,有:⎰⎰=''''lj i i li j dx S dx EI 020)(φφρωφφ (3)利用分部积分,上式左边可写为:⎰⎰''''+'''-'''=''''l lj i l i j l i j i j dx EI EI EI dx EI 000)()()(φφφφφφφφ (4)由于在梁的简单边界上,总有挠度或剪力中的一个与转角或弯矩中的一个同时为零,所以,上式右边第一、第二项等于零,成为:⎰⎰''''=''''l lj i i j dx EI dx EI 0)(φφφφ 将上式代入(3)中,有:⎰⎰=''''llj i i j i dx S dx EI 02φφρωφφ(5)式(2)乘i φ并沿梁长对x 积分,同样可得到:⎰⎰=''''llji jji dx S dx EI 02φφρωφφ (6)由式(5)、(6)得:⎰=-lj i ji dx S 0220)(φφρωω(7)如果j i ≠时,j i ωω≠,则有:⎰=lji dx S 00φφρ 当j i ≠(8)上式即梁的主振型关于质量的正交性。