平面机构运动副和运动简图
- 格式:ppt
- 大小:1.44 MB
- 文档页数:28


使两物体直接接触而又能产生一定相对运动的联接,称为运动副。
根据运动副中两构接触形式不同,运动副可分为低副和高副。
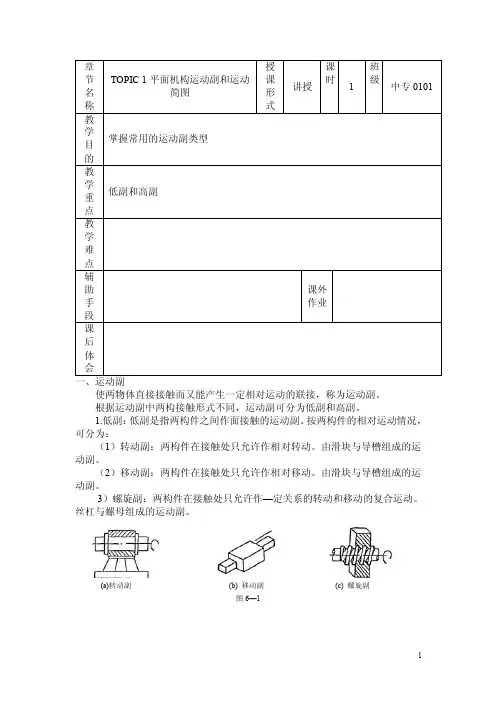
1.低副:低副是指两构件之间作面接触的运动副。
按两构件的相对运动情况,可分为:(1)转动副:两构件在接触处只允许作相对转动。
由滑块与导槽组成的运动副。
(2)移动副:两构件在接触处只允许作相对移动。
由滑块与导槽组成的运动副。
3)螺旋副:两构件在接触处只允许作—定关系的转动和移动的复合运动。
丝杠与螺母组成的运动副。
2.高副:高副是两构件之间作点或线接触的运动副。
二、自由度—个作空间运动的构件具有六个独立的运动,即沿X 、Y 、Z 轴的移动和绕 X 、Y 、Z 轴的转动,构件的这种独立的运动称为构件的自由度。
一个作平面运动的自由构件,可以产生三个独立运动,即沿X 、Y 、Z 轴的移动及绕A 点(极点)的转动,所以具有三个自由度。
当两个作平面运动的构件组成运动副之后,由于受到约束,相应的自由度也随之减少。
转动副约束了沿 X 、Y 轴向移动的自由度,保留了—个转动的自由度。
移动副约束了沿一轴方向的移动和在平面内两个转动自由度,保留了沿另—轴方向移动的自由度。
高副则只约束了沿接触处公法线方向移动的自由度,保留了绕接触处的转动和沿接触处共切线方向移动的两个自由度。
所以在平面机构中,每个低副引入两个约束,使构件失去两个自由度。
每个高副引入一个约束,使构件失去一个自由度。
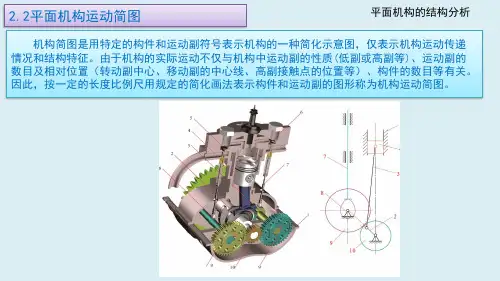
三、平面机构的运动简图绘制平面机构运动简图的目的绘制平面机构运动简图的目的在于:撇开与机构运动无关的外部形态,把握机构运动性质的内在联系,揭示机构的运动规律和特性。
机构的相对运动只与运动副的数目、类型、相对位置及某些尺寸有关,而与构件的横截面尺寸、组成构件的零件数目、运动副的具体结构无关。
用线条表示构件,用简单符号表示运动副的类型,按一定比例确定运动副的相对位置及与运动有关的尺寸,这种简明表示机构各构件运动关系的图形称机构运动简图。
只表示机构的结构及运动情况,不严格按比例绘制的简图称为机构示意图。