BLDC霍尔位置传感器驱动设计
- 格式:ppt
- 大小:1.68 MB
- 文档页数:36

内置霍尔感应电机驱动ic原理
内置霍尔感应电机驱动IC(集成电路)的原理主要基于霍尔效应和电机驱动技术。
这种IC通常用于无刷直流电机(BLDC)或有刷直流电机(BDC)的控制。
下面简要介绍其工作原理:
1.霍尔效应:霍尔效应是指当电流通过置于磁场中的导体时,在导体的垂直于磁场和电流方向的两个端面之间会出现电势差。
内置霍尔感应电机驱动IC
利用霍尔元件(霍尔传感器)检测电机转子的位置,从而确定换向时刻。
2.电机驱动:电机驱动部分负责根据霍尔传感器的信号控制电机的换向和速度。
对于无刷直流电机,驱动IC通过控制定子绕组的电流方向来实现电子换向。
对于有刷直流电机,驱动IC则通过控制电枢电流的方向来实现换向。
具体来说,内置霍尔感应电机驱动IC的工作原理如下:
1.当电机启动时,霍尔传感器检测电机转子的初始位置。
2.根据霍尔传感器的信号,驱动IC确定电机的换向时刻,并控制相应的功率开关管导通或截止,从而改变定子绕组或电枢的电流方向。
3.通过不断检测霍尔传感器的信号并调整功率开关管的状态,驱动IC可以实现对电机转速和转向的精确控制。
内置霍尔感应电机驱动IC具有集成度高、体积小、功耗低、可靠性高等优点,广泛应用于各种小型电动工具、家用电器、汽车电子设备等领域。
无传感器BLDC驱动控制系统的设计近年来,国内市场上电动车使用的电机主要有三种:有刷电机、有位置传感器无刷电机和无位置传感器无刷电机。
使用有刷直流电机容易解决换相问题,但是噪音大,而且碳刷容易磨损或损坏,这会增大维护、维修难度,增加使用成本;使用有传感器无刷直流电机容易确定转子位置,解决换相问题,但却增大了电机的设计、制造和安装难度,也增加了成本,并且传感器容易损坏,导致电机的使用寿命缩短;无传感器无刷直流电机换相虽然在技术上有难度,但在成本和寿命上更容易满足消费者需求。
综合以上特点,本文讨论的方案选择了性价比较高的无传感器无刷直流电机,以HT46R6?为主控芯片,用反电势法(back electromotive force)实现电机正常换相,软硬结合,使电动车驱动系统工作在最佳状态,从而提高产品的可靠性和使用寿命。
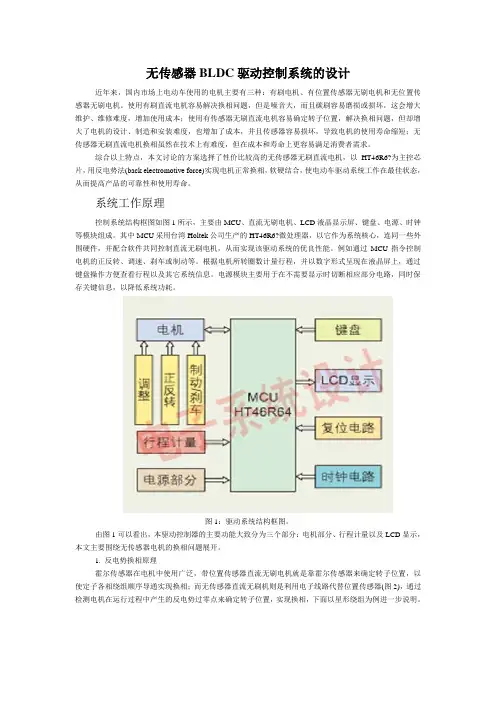
系统工作原理控制系统结构框图如图1所示,主要由MCU、直流无刷电机、LCD液晶显示屏、键盘、电源、时钟等模块组成。
其中MCU采用台湾Holtek公司生产的HT46R6?微处理器,以它作为系统核心,连同一些外围硬件,并配合软件共同控制直流无刷电机,从而实现该驱动系统的优良性能。
例如通过MCU指令控制电机的正反转、调速、刹车或制动等。
根据电机所转圈数计量行程,并以数字形式呈现在液晶屏上,通过键盘操作方便查看行程以及其它系统信息。
电源模块主要用于在不需要显示时切断相应部分电路,同时保存关键信息,以降低系统功耗。
图1:驱动系统结构框图。
由图1可以看出,本驱动控制器的主要功能大致分为三个部分:电机部分、行程计量以及LCD显示,本文主要围绕无传感器电机的换相问题展开。
1. 反电势换相原理霍尔传感器在电机中使用广泛,带位置传感器直流无刷电机就是靠霍尔传感器来确定转子位置,以使定子各相绕组顺序导通实现换相;而无传感器直流无刷机则是利用电子线路代替位置传感器(图2),通过检测电机在运行过程中产生的反电势过零点来确定转子位置,实现换相,下面以星形绕组为例进一步说明。
电动助力转向系统BLDC电机控制模块设计摘要由于电动助力转向(EPS)系统具有高性能、高效率、低成本、节能环保等优点,随着汽车电子技术的发展,电动助力转向技术逐渐取代传统的液压助力转向(HPS),成为转向助力技术的主流。
目前,EPS 的助力电机多采用传统的永磁直流电机,直流电机所用电刷产生的机械摩擦,带来了噪声、火花、电磁干扰以及寿命短等致命弱点,降低了 EPS 的可靠性和安全性能。
因此,开发一种新型的、适应于 EPS 的驱动电机—无刷直流电机,对提高 EPS 的性能具有重要意义。
本文在详细了解EPS系统性能要求和工作原理的基础上,对各种已有的EPS助力电机进行了总结和比较。
对比结果表明,无刷直流电机(BLDC)凭借其显著的优点,成为EPS助力电机的较优选择。
本文研究开发了 EPS 用无刷直流电机控制系统,论文的主要工作有:1)分析了无刷直流电机的结构、工作原理。
并从电磁因素、电流换向、齿槽因素、电枢反应机械工艺等方面分析和研究了造成转矩脉动的原因,提出了改进措施。
2)构建了以Microchip公司的dsPIC33FJ12MC202微处理器作为控制核心的无刷直流机控制系统,设计了系统的硬件电路,编写调试了相应的控制程序,设计了无刷直流电机的控制系统。
实验表明:无刷直流电机体积小、出力大、机械特性好,是 EPS 的理想驱动电机。
开发的无刷直流电机控制器成本低廉,性能可靠,符合 EPS 助力平顺、方便操纵、实时性高的要求,为后续的研究工作提供了良好的开发、测试平台。
关键词:电动助力转向;无刷直流电机;dsPIC33FJ12MC202;控制系统AbstractAs the electric power steering (EPS) system with high performance, high efficiency, low cost , energy saving , etc., with the development of automotive electronics technology, electric power steering technology is gradually replacing the traditionalhydraulic power steering (HPS), became steering technology mainstream .Currently , EPS booster motors use more conventional permanent magnet DC motors, DC motors brush mechanical friction , bringing noise , sparks , electromagnetic interference , and short life fatal weakness , reducing the reliability and security of EPS performance . Therefore , the development of a novel , adapted EPS drive motor - brushless DC motor, to improve the EPS performance is important.In this paper, a detailed understanding of the EPS system performance requirements and works on the basis of various existing EPS booster motors were summarized and compared. Comparative results show that the brushless DC motor (BLDC) With its significant advantages to become the optimum choice EPS booster motor. In this paper, the research and development of EPS Brushless DC motor control system , the paper's main tasks are:1 ) analyzes the structure of brushless DC motor works. From electromagnetic factors , current commutation , alveolar factors , technology and other aspects of mechanical armature reaction analysis and study of the causes of torque ripple , the proposed improvements.2 ) constructed with Microchip 's dsPIC33FJ12MC202 microprocessor as the core control brushless DC motor control system , the hardware circuit design , write and debug the corresponding control procedures designed brushless DC motor control system .Experimental results show that : the brushless DC motor , small size , large output , good mechanical properties, is ideal for EPS drive motor . Low cost brushless DC motor controller developed , reliable performance , in line with EPS power smooth , easy manipulation, high real-time requirements, providing a good development for subsequent studies , the test platform.Keywords :electric power steering ; brushless DC motor ; dsPIC33FJ12MC202; Control System目录摘要 (1)Abstract (2)第一章绪论 (4)1. 1 引言 (4)1. 2 课题研究的目的和意义 (4)1. 3 电动助力转向系统的发展历程和研究现状 (6)1. 4 EPS系统原理 (7)1. 5 EPS用助力电机概述 (8)1. 6 无刷直流电动机概述 (10)1. 7 课题研究的主要内容 (12)第二章 EPS用永磁无刷直流电动机的设计 (12)2. 1 电机结构型式的选择 (12)2. 2 永磁无刷直流电动机的设计概述 (15)2. 3 电磁负荷和电机主要尺寸 (16)2. 4 样机的主要参数 (17)2. 5 本章小结 (18)第三章EPS用无刷直流电动机控制系统的设计 (18)3. 1EPS控制系统概述 (18)3. 2 无刷直流电机控制系统的设计 (21)3. 3主控电路 (23)3. 4功率及驱动电路 (28)3. 5控制系统软件设计 (31)3. 6 硬件电路及实验结果 (33)3. 7 本章小结 (34)结论 (35)参考文献(References) (36)致谢 (37)第一章绪论1.1 引言汽车转向系统的性能直接影响到汽车的操纵稳定性,对于确保车辆的安全行驶,减少交通事故以及保护驾驶员的人身安全,改善驾驶员的工作条件起着重要的作用。
DSC控制下的无位置传感器的无刷直流电机驱动的
设计的开题报告
一、选题背景
无刷直流电机(BLDC)因其具有高效、低噪音、长寿命等特点,在许多工业领域得到了广泛应用。
目前,电机控制技术已经非常成熟,而且随着控制器的价格逐渐下降,BLDC控制器的应用越来越广泛。
传统的BLDC电机需要安装位置传感器来自动控制电机的转速和方向。
然而,这种传感器增加了系统的成本和复杂性,同时还会影响电机的可靠性。
因此,越来越多的研究者开始探索无位置传感器的BLDC驱动技术。
二、研究内容
本次设计的主要目的是研究DSC控制下的无位置传感器的BLDC驱动技术。
采用无位置传感器控制BLDC的驱动系统不仅简化了系统结构,降低了制造成本,并且还大大提高了系统的可靠性。
在本次设计中,将针对DSC控制器进行研究,实现BLDC电机的无位置传感器控制。
三、研究方法
本次设计将采用以下流程进行:
1. 了解BLDC电机的控制原理和无位置传感器的应用技术;
2. 对DSC进行研究并确定其应用范围;
3. 根据BLDC电机的特性和DSC的应用要求,设计BLDC电机无位置传感器控制电路;
4. 利用测试工具,对所设计的无位置传感器控制电路进行验证和优化。
四、预期成果
本次设计预期实现BLDC电机的无位置传感器控制,并优化电路参数以达到最佳效果。
同时,还将做出详实的设计报告和实验报告,并开发出相应的程序代码以供其他用户参考。
五、拟解决问题
本次设计将探索DSC控制下BLDC电机无位置传感器控制的技术,解决传感器对系统稳定性的影响,提高电机的可靠性,同时使系统成本更低、结构更简单。
BLDC电动机本体设计及控制原理(详细版)一、引言直流无刷电动机(Brushless DC Motor,BLDC)是近年来研究与应用领域日益扩大的电机类型。
它具有高效率、高转矩、低噪音、长使用寿命等优点,广泛应用于电动汽车、航空航天、家用电器、微型机器人等领域。
本文主要论述BLDC电动机本体设计及控制原理。
二、BLDC电动机结构及工作原理BLDC电动机主要由转子、定子、传感器、电路控制系统等部分组成。
1. 转子转子是BLDC电动机的核心部分,主要由磁铁和轴组成。
磁铁通常采用强磁性永磁体,由于磁阻较小、磁延迟性小,因此稳定性好,容易控制。
轴材料通常为钢铁材料,既满足强度要求,又具备较高的刚度。
转子采用永磁体的励磁方式,可以降低电机的故障率。
2. 定子定子是BLDC电动机的外部部分,主要由铁芯和绕组组成。
定子铁芯通常由硅钢片穿插叠压而成,目的是避免铁芯中涡流的损耗。
绕组则由若干个线圈组成,其数量与定子极数有关。
3. 传感器传感器主要包括霍尔元件和编码器。
霍尔元件主要用于检测转子磁极位置,编码器用于检测转子具体位置。
这些传感器输出的信号可以通过控制器计算得到电机的精确位置和转速。
4. 电路控制系统电路控制系统主要由驱动电路和控制器组成。
由于BLDC电机是三相交流电机,因此需要采用三相桥式电路进行驱动。
这种电路可以通过PWM技术实现精确的电机控制。
BLDC电动机的工作原理是依靠磁场作用产生电动力矩,具体而言,是依靠定子电流的旋转磁场作用与永磁体产生相互作用力而产生电动力矩的。
BLDC电机通过不断改变定子电流方向和大小来控制电机的转速和方向。
三、BLDC电动机控制原理1. 电机转速控制为了实现BLDC电动机的精确控制,需要对电机的转速进行控制。
一般采用PID控制算法对电机进行控制。
PID算法通过将实际转速与设定值进行比较,计算出误差,然后根据误差大小来调整控制电压的大小和方向。
这种方法可以有效地降低电机的振动和噪声,提高电机的精度和稳定性。
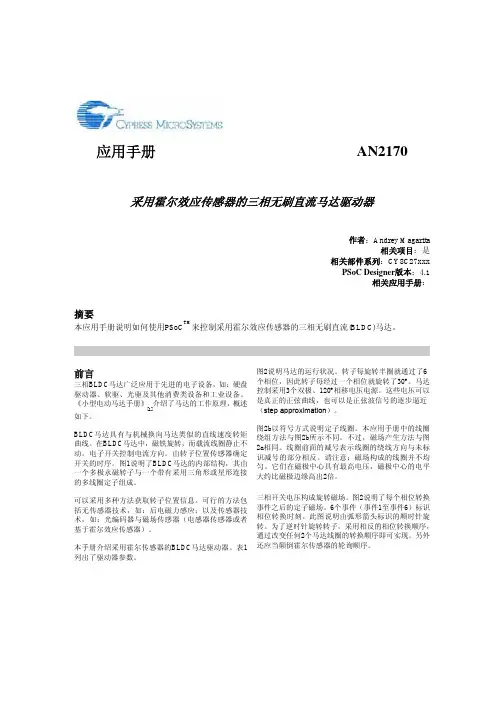
应用手册AN2170 采用霍尔效应传感器的三相无刷直流马达驱动器作者:Andrey Magarita相关项目:是相关部件系列:CY8C27xxxPSoC Designer版本:4.1相关应用手册:摘要本应用手册说明如何使用PSoC TM来控制采用霍尔效应传感器的三相无刷直流(BLDC)马达。
前言三相BLDC马达广泛应用于先进的电子设备,如:硬盘驱动器、软驱、光驱及其他消费类设备和工业设备。
《小型电动马达手册》[1]介绍了马达的工作原理,概述如下。
BLDC马达具有与机械换向马达类似的直线速度转矩曲线。
在BLDC马达中,磁铁旋转,而载流线圈静止不动。
电子开关控制电流方向。
由转子位置传感器确定开关的时序。
图1说明了BLDC马达的内部结构,其由一个多极永磁转子与一个带有采用三角形或星形连接的多线圈定子组成。
可以采用多种方法获取转子位置信息。
可行的方法包括无传感器技术,如:后电磁力感应;以及传感器技术,如:光编码器与磁场传感器(电感器传感器或者基于霍尔效应传感器)。
本手册介绍采用霍尔传感器的BLDC马达驱动器。
表1列出了驱动器参数。
图2说明马达的运行状况。
转子每旋转半圈就通过了6个相位,因此转子每经过一个相位就旋转了30°。
马达控制采用3个双极、120°相移电压电源。
这些电压可以是真正的正弦曲线,也可以是正弦波信号的逐步逼近(step approximation)。
图2b以符号方式说明定子线圈。
本应用手册中的线圈绕组方法与图2b所示不同。
不过,磁场产生方法与图2a相同。
线圈前面的减号表示线圈的绕线方向与未标识减号的部分相反。
请注意:磁场构成的线圈并不均匀。
它们在磁极中心具有最高电压,磁极中心的电平大约比磁极边缘高出2倍。
三相开关电压构成旋转磁场。
图2说明了每个相位转换事件之后的定子磁场。
6个事件(事件1至事件6)标识相位转换时刻。
此图说明由弧形箭头标识的顺时针旋转。
为了逆时针旋转转子,采用相反的相位转换顺序,通过改变任何2个马达线圈的转换顺序即可实现。

bldc驱动电路设计-回复BDLC驱动电路设计引言:电机驱动是现代工业中常见的应用之一。
其中,电动机的高效运行和精确控制离不开一个可靠的驱动电路。
在不同类型的电动机中,无刷直流电机(Brushless DC Motor,BLDC)因其结构简单、控制精确等特点而被广泛应用。
本文将以BDLC驱动电路设计为主题,从基本知识讲解、电路设计流程、关键参数选择、电路实现、性能评估等方面进行一步一步的回答。
一、基本知识讲解:1. 什么是BDLC?BDLC是无刷直流电机的简称,它是将传统的有刷直流电机与AC异步电机相结合的一种新型电动机。
相比传统有刷直流电机,BDLC具有无摩擦、无电刷磨损、转矩平稳等优点,因此在许多应用场景中取代了传统直流电机。
2. BDLC的工作原理是什么?BDLC电机的工作原理基于切换转子磁极与定子磁场的相互作用。
通过通过不同的方式控制电流方向,实现电子换向,使得BDLC可以实现高效率和高动态响应的运行。
3. BDLC驱动电路中的关键元件有哪些?BDLC驱动电路中的关键元件包括功率MOSFET、电流检测电阻、霍尔传感器等。
二、电路设计流程:1. 确定电机参数和运行要求:首先,需要清楚了解电机的额定电压、额定电流、最大转速等参数,以及驱动电路对电机的保护需求、控制方式等运行要求。
2. 计算电流、功率和电压:根据电机的额定电压和额定电流,可以计算出有效的电流和功率。
在设计中,需要合理选择功率MOSFET,确保其能够承受电机的额定工作电流。
3. 设计电流检测电阻:为了实现电流反馈控制,需要在驱动电路中设计合适的电流检测电阻,以便准确测量电机的电流。
4. 选择霍尔传感器:BDLC电机控制需要精确的转子位置信息,常用的方式是通过霍尔传感器获取转子位置信息。
在设计中,需要选择合适的霍尔传感器类型和位置,以确保传感器能够准确地检测到转子位置。
5. 选择驱动方案:根据电机运行要求和控制方式,选择合适的驱动方案,如三相桥式驱动、半桥驱动等,并考虑驱动电路的保护功能,避免电机过流、过压等故障。
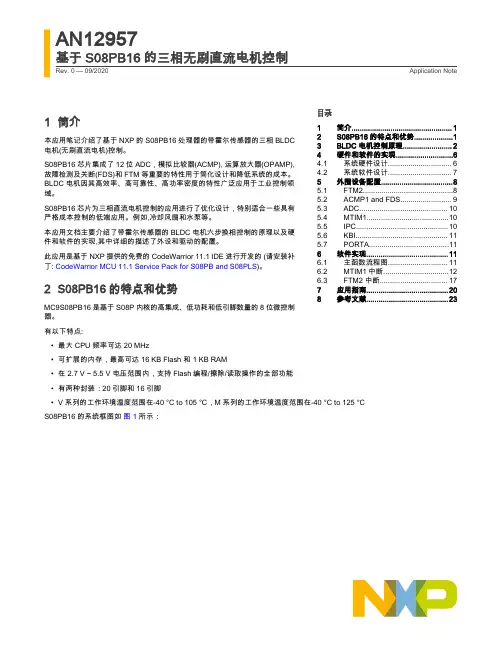
1简介本应用笔记介绍了基于NXP 的S08PB16处理器的带霍尔传感器的三相BLDC 电机(无刷直流电机)控制。
S08PB16 芯片集成了 12位 ADC,模拟比较器(ACMP), 运算放大器(OPAMP),故障检测及关断(FDS)和FTM 等重要的特性用于简化设计和降低系统的成本。
BLDC 电机因其高效率、高可靠性、高功率密度的特性广泛应用于工业控制领域。
S08PB16芯片为三相直流电机控制的应用进行了优化设计,特别适合一些具有严格成本控制的低端应用。
例如,冷却风扇和水泵等。
本应用文档主要介绍了带霍尔传感器的BLDC 电机六步换相控制的原理以及硬件和软件的实现,其中详细的描述了外设和驱动的配置。
此应用是基于NXP 提供的免费的CodeWarrior 11.1 IDE 进行开发的 (请安装补丁: CodeWarrior MCU 11.1 Service Pack for S08PB and S08PLS )。
2S08PB16的特点和优势MC9S08PB16是基于S08P 内核的高集成、低功耗和低引脚数量的8位微控制器。
有以下特点:•最大 CPU 频率可达20 MHz•可扩展的内存,最高可达16 KB Flash 和 1 KB RAM•在 2.7 V ~ 5.5 V 电压范围内,支持Flash 编程/擦除/读取操作的全部功能•有两种封装:20引脚和16引脚•V 系列的工作环境温度范围在-40 °C to 105 °C,M 系列的工作环境温度范围在-40 °C to 125 °C S08PB16 的系统框图如 图 1 所示:目录1简介.................................................12S08PB16的特点和优势...................13BLDC 电机控制原理........................24硬件和软件的实现............................64.1系统硬件设计...............................64.2系统软件设计...............................75外围设备配置...................................85.1FTM2............................................85.2ACMP1 and FDS.........................95.3ADC...........................................105.4MTIM1........................................105.5IPC.............................................105.6KBI.............................................115.7PORTA.......................................116软件实现........................................116.1主函数流程图.............................116.2MTIM1中断................................126.3FTM2 中断.................................177应用指南. (208)参考文献 (23)AN12957基于S08PB16的三相无刷直流电机控制Rev. 0 — 09/2020Application Note图 1. S08PB16 系统框图S08PB16用于无刷直流电机控制,有以下优势:•有多路PWM信号输出。
一、介绍BLDC电机(Brushless DC Motor)是一种无刷直流电机,它采用永磁体和电子元件来实现换向。
为了准确控制电机的转速和位置,通常需要使用霍尔传感器来检测转子的位置。
在本文中,我们将讨论如何利用霍尔传感器来计算BLDC电机的位置,以便实现精准的控制。
二、BLDC电机的工作原理1. 基本结构BLDC电机由定子和转子组成,其中定子上安装有绕组,用来产生磁场。
而转子上则安装有永磁体或者电子式永磁体。
转子上的永磁体通过控制器产生的交变磁场来进行换向,从而驱动电机转动。
2. 霍尔传感器为了确定转子的位置,通常在电机的定子上安装三个霍尔传感器,它们均匀分布在电机的周围,并与转子上的永磁体对准。
当转子旋转时,霍尔传感器可以检测永磁体的位置,并将此信息反馈给控制器。
三、霍尔传感器位置计算的原理1. 传统方法传统的霍尔传感器位置计算方法是通过检测霍尔信号的变化来确定转子的位置。
通过对霍尔信号进行脉冲计数,可以确定转子的位置,但是这种方法存在精度不高,响应速度慢的缺点。
2. 电子换向方法电子换向方法是一种新的转子位置计算方法,它通过对霍尔信号进行处理,可以准确快速地确定转子的位置。
通过采集霍尔信号的变化,结合预先存储的转子位置信息,控制器可以实时计算出转子的位置,并相应地进行换向控制。
四、实际应用随着电机控制技术的不断发展,电子换向方法已经被广泛应用于BLDC 电机控制系统中。
通过使用电子换向方法,可以大大提高电机的控制精度和响应速度。
电子换向方法还可以减少霍尔传感器的数量,降低系统成本。
五、总结BLDC电机的位置控制对于实现精密控制和高效运行至关重要,而霍尔传感器位置计算方法则是实现精准控制的关键。
通过使用电子换向方法,可以提高转子位置计算的精度和响应速度,从而实现更加精准和高效的电机控制。
随着技术的不断进步,相信电子换向方法将会在BLDC电机控制领域发挥越来越重要的作用。
六、电子换向方法的优势1. 精度高相比传统的脉冲计数方法,电子换向方法能够更精确地确定转子的位置。
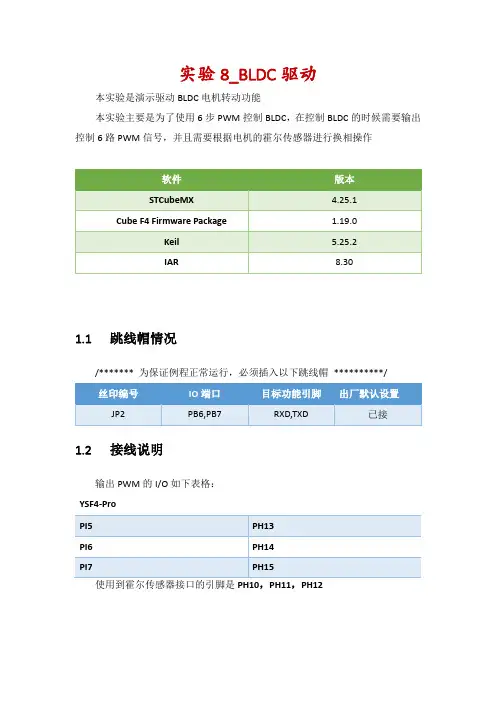
实验8_BLDC驱动
本实验是演示驱动BLDC电机转动功能
本实验主要是为了使用6步PWM控制BLDC,在控制BLDC的时候需要输出控制6路PWM信号,并且需要根据电机的霍尔传感器进行换相操作
1.1 跳线帽情况
/******* 为保证例程正常运行,必须插入以下跳线帽**********/
1.2 接线说明
输出PWM的I/O如下表格:
图 1 接线实物
1.3 操作与现象
1.打开实验箱电源。
2.串口屏上按照以下顺序点击进入6 PWM输出控制页面
实验选项->直流无刷电机->实验1
3.点击屏幕上的启动按钮,主控板输出6路不通的PWM波形,可以使用
逻辑分析仪或者示波器观看波形。
基于Hall位置传感器的BLDCM正弦波驱动性能研究马瑞卿;邓钧君【期刊名称】《微电机》【年(卷),期】2011(044)007【摘要】Adriving method of Brushless DC Motor (BLDCM) with sinusoidal current was presented. Space vector pulse width modulation ( SVPWM) techniques was adopted to generate sinusoidal current for motor three-phase windings according to the rotor position information provided by three-phase Hall sensors. The experimental results show that the approach is more effective for the minimization of the torque ripple and audible noise than the traditional square current driving method, and practical for quiet operation in low cost home appliances.%针对稀土永磁无刷直流电机( BLDCM),借助电机本体所固有的三相Hall转子位置传感器,通过空间矢量脉宽调制(SVPWM)控制技术,实现了BLDCM的正弦波电流驱动.实验结果表明,与方波电流驱动相比,采用正弦波驱动可有效减小BLDCM的运行噪声,降低转矩脉动,实现低成本家用电器等领域的静音运行.【总页数】4页(P59-61,109)【作者】马瑞卿;邓钧君【作者单位】西北工业大学稀土永磁电机及控制技术研究所,西安710129;西北工业大学稀土永磁电机及控制技术研究所,西安710129【正文语种】中文【中图分类】TM36+1【相关文献】1.基于无位置传感器 BLDCM转矩脉动抑制的研究 [J], 郑晓婉;杨胜浩;曹玲芝2.基于无位置传感器BLDCM控制系统的研究 [J], 高晗璎;黄淑娟3.基于无位置传感器的BLDCM方波控制策略研究 [J], 朱权4.基于DSP的无位置传感器BLDCM调速系统的研究与实现 [J], 杨柏松5.基于IRMCF343的无位置传感器BLDCM控制系统研究 [J], 李钦奉;陈齐伟;尹美富因版权原因,仅展示原文概要,查看原文内容请购买。
stm32电机驱动bldc原理一、引言在现代工业自动化领域中,电机驱动技术扮演着至关重要的角色。
一种常见的电机类型是永磁无刷直流电机(BLDC),它在电动工具、机械设备以及汽车等领域中广泛应用。
本文将详细介绍stm32电机驱动bldc的原理。
二、BLDC电机简介1.BLDC电机的构成–转子:包含永磁体,多个磁极。
–定子:包含若干线圈和霍尔传感器。
–控制器:通常使用stm32单片机。
2.BLDC电机的工作原理 BLDC电机的工作原理基于电流在线圈中的方向变换来驱动转子。
三、stm32单片机驱动BLDC电机原理1.stm32单片机特点–低功耗,高性能。
–强大的计算和控制能力。
–丰富的外设接口。
2.接口电路设计–驱动电路:使用MOSFET或IGBT驱动电机。
–电流传感器:用于监测电流大小。
–位置传感器:通常采用霍尔传感器。
3.BLDC电机驱动算法–闭环控制:通过反馈信号控制电机的转速。
–传感器定位:使用霍尔传感器检测转子位置。
–电流控制:根据电流传感器的反馈信号来控制电机的电流。
四、stm32电机驱动BLDC的代码实现1.硬件配置–设置引脚模式和功能。
–配置时钟和外设中断。
2.软件实现–初始化定时器和PWM信号输出。
–实现控制算法。
–监测传感器信号和电流传感器信号。
–调整PWM信号以控制电机转速。
3.代码示例#include "stm32f4xx.h"void TIM3_IRQHandler(void){if(TIM_GetITStatus(TIM3, TIM_IT_CC2) != RESET){// 处理中断事件TIM_ClearITPendingBit(TIM3, TIM_IT_CC2);}}int main(void){// 初始化定时器和GPIO引脚// 配置中断优先级// 启动定时器while(1){// 等待中断事件}}五、应用实例1.电动工具 stm32电机驱动bldc技术可应用于各种电动工具,如电钻、电锯等,提高其效率和精度。
BLDC原理与驱动BLDC(Brushless Direct Current)无刷直流电机是一种采用电子换向技术、不需要碳刷与换向器件的电机。
相比传统的有刷直流电机,BLDC电机具有寿命长、效率高、噪音低等优点,因此在很多领域得到广泛应用。
下面将介绍BLDC电机的原理及其驱动方式。
BLDC电机原理:BLDC电机由定子和转子组成。
其转子上装有永磁体,通过变换定子绕组通电状态来使转子在磁场作用下旋转。
BLDC电机的转子是由多极永磁体组成的,而定子上的绕组由驱动器控制,通过改变绕组通电状态,使得定子磁场与转子磁场相互作用,从而实现转子的旋转。
BLDC电机的驱动方式:BLDC电机的驱动方式有两种,分别是传统的霍尔传感器驱动方式和无霍尔传感器驱动方式。
1.霍尔传感器驱动方式:霍尔传感器安装在定子上,用于检测转子位置。
BLDC电机的控制器通过读取霍尔传感器的信号来确定转子的位置,以便实现合适的绕组通电状态。
在此驱动方式下,电机的起动速度较快且无需外部反电动势检测,电机效率较高,但系统复杂度相对较高。
2.无霍尔传感器驱动方式:无霍尔传感器驱动方式采用传感器无关的控制算法,通过电机本身的反电动势来确定转子位置。
该驱动方式在电机结构上简化了设计,但在启动过程中需要检测转子位置,因此起动速度较慢。
此外,由于无霍尔传感器驱动方式需要通过测量电机的反电动势来估计绕组通电状态,所以在低速运行时可能存在转矩波动和定位不准确的问题。
因此,通常会在启动时使用霍尔传感器,以获得准确的转子位置,然后切换到无霍尔传感器驱动方式。
BLDC电机的驱动器将接收来自控制器的PWM(脉宽调制)信号,并控制适当的电压和电流输出到电机的绕组上,以实现所需的转速和扭矩。
控制器还可以使用闭环反馈机制来实现更高的精度和性能。
总结:BLDC电机通过电子换向技术实现了无刷与换向器件的电机驱动,在各个领域具有广泛应用前景。
BLDC电机驱动方式包括传统的霍尔传感器驱动方式和无霍尔传感器驱动方式,每种方式都有其优势和劣势。