弹性力学第十一章弹性力学的变分原理
- 格式:docx
- 大小:190.96 KB
- 文档页数:37
七、弹性力学参量的下标表示法前面给出的力分量、应力分量、应变分量和位移分量,其表示方法引用的是记号法;这是一种公认的弹性力学参量表示方法。
下标表示法书写简洁,便于力学问题的理论推导。
1. 下标符号具有相同性质的一组物理量,可用一个带下标的字母表示:如:位移分量u, v, w 表示为u 1, u 2, u 3,缩写为u i (i =1,2,3)坐标x, y, z 表示为x 1, x 2, x 3,缩写为x i (i =1,2,3)单位矢量i, j, k 表示e i (i =1,2,3)。
体力分量X, Y, Z 表示为X 1, X 2, X 3,缩写为X i (i =1,2,3)应力分量:z zy zx yz y yxxz xy x 可表示为:333231232221131211 缩写为:)3,2,1;3,2,1( j i ij4. 克罗内克(Kroneker)符号具有如下性质 )cos(j i ij e ej i e eji ji ij 01 100010001333231232221131211 ij ij (1)3ii j i ij A A ij 也称换名算子同理:ijkj ik A a (2)选取可能位移:十、利用位移变分原理的近似解法m mm m mm mm m w C w w v B v v u A u u 000其中系数是完全任意的m m m C B A 、、1、瑞雷—里兹法(1)是在边界上满足位移边界条件的设定函数000w v u 、、(2)是在边界上为零的设定函数m m m w v u 、、可见,由(1)、(2)选取出来的是可能位移w v u 、、。
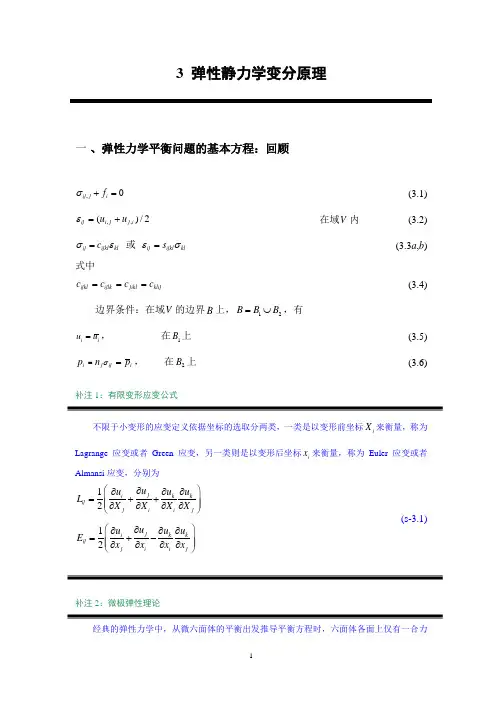
3 弹性静力学变分原理一 、弹性力学平衡问题的基本方程:回顾,0ij j i f σ+= 在域V 内(3.1),,()/2ij i j j i u u ε=+ (3.2) ij ijkl kl c σε= 或 ij ijkl kl s εσ= (3.3a ,b )式中ijkl ijlk jikl klij c c c c ===(3.4)边界条件:在域V 的边界B 上,12B B B =⋃,有i i u u =, 在1B 上(3.5) ij ij i p n p σ==, 在2B 上(3.6)补注1:有限变形应变公式不限于小变形的应变定义依据坐标的选取分两类,一类是以变形前坐标i X 来衡量,称为Lagrange 应变或者Green 应变,另一类则是以变形后坐标i x 来衡量,称为Euler 应变或者Almansi 应变,分别为12j i k k ij j i i j u uu u L X X X X ⎛⎫∂∂∂∂=++⎪ ⎪∂∂∂∂⎝⎭12j i k k ij ji i j u u u u E x x x x ⎛⎫∂∂∂∂=+- ⎪ ⎪∂∂∂∂⎝⎭ (s-3.1)补注2:微极弹性理论经典的弹性力学中,从微六面体的平衡出发推导平衡方程时,六面体各面上仅有一合力作用,自然有三个分量。
但我们在研究宏观构件,比如弹性直梁时,其截面上除了一个合力外,尚有一个合力矩(即三个力矩分量)。
也就是说,在经典的弹性理论中,微元体面上的合力矩被忽略了。
如果考虑这一合力矩的影响,我们便得到所谓的Cosserat 理论,相应的介质称为Cosserat 介质。
事实上,第一个考虑合力矩影响的是德国学者W. V oigt ,他于1887年发表论文,发现这一考虑将导致应力张量的非对称性。
E. Cosserat 和F. Cosserat 兄弟俩于1909年完善了Voigt 的工作,特别是提出了物体在变形过程中其每一点不仅有平移变位,而且伴随着转动变位。
弹性力学的变分原理和应用1. 弹性力学的基本原理•弹性力学是研究物体在受力后发生形变,但受力取消后又能恢复原状的力学学科。
•弹性力学的基本原理包括胡克定律、平衡条件和应变能最小原理。
1.1 胡克定律•胡克定律是描述弹性体材料内部应力和应变之间关系的基本规律。
•胡克定律表述为应力与应变之间成正比,且比例系数为弹性模量。
•弹性模量是衡量材料弹性性能的物理参数,常见的有杨氏模量、剪切模量等。
1.2 平衡条件•在弹性力学中,物体达到平衡时需要满足平衡条件。
•平衡条件包括力的平衡条件和力矩的平衡条件。
力的平衡条件要求合外力为零,力矩的平衡条件要求合外力矩为零。
1.3 应变能最小原理•应变能最小原理是变分法在弹性力学中的应用。
•应变能是描述物体变形程度的物理量,应变能最小原理认为在给定边界条件下,物体的平衡状态对应的应变能应该是极小值。
2. 弹性力学的变分原理•变分原理是弹性力学中一种重要的数学方法,用于研究力学系统的平衡和稳定性。
•弹性力学的变分原理主要有广义虚功原理和最小势能原理。
2.1 广义虚功原理•广义虚功原理是描述连续介质力学中变形对象平衡状态的数学表述。
•广义虚功原理要求在满足平衡条件的情况下,任意变形状态与原始状态之间的虚功总和等于零。
•广义虚功原理能够推导出弹性力学的基本方程,如平衡方程和边界条件。
2.2 最小势能原理•最小势能原理是应变能最小原理在弹性力学中的具体应用。
•最小势能原理认为在给定边界条件下,力学系统的平衡状态对应的势能应该是极小值。
•最小势能原理可以通过变分法推导出与广义虚功原理等价的弹性力学方程。
3. 弹性力学的应用•弹性力学在工程和科学研究中有广泛的应用,以下列举其中一些应用领域。
3.1 结构力学•弹性力学在结构力学领域中应用广泛,用于探索材料的力学性能和结构的稳定性。
•结构力学涉及材料的弹性性质、刚度、变形和应力分布等问题,借助弹性力学的原理可以进行合理的设计和分析。
3.2 地质力学•地质力学研究地球内部岩石和土壤的力学性质及其变形行为。
弹性力学的变分原理及其应用弹性力学的基本概念•弹性力学是研究物体在外力作用下产生形变的力学学科。
•弹性力学主要关注物体的弹性变形,即物体在受到外力作用后可以恢复到原始形状的能力。
•弹性力学可以用数学模型来描述物体的变形行为,其中变分原理是一种重要的分析工具。
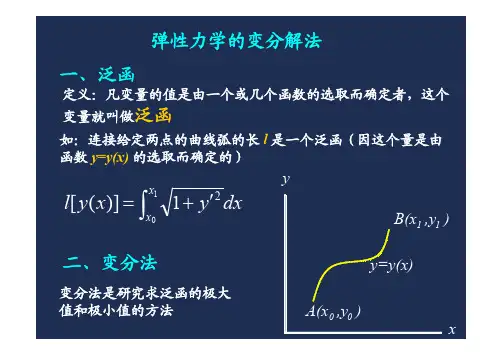
变分原理的概念•变分原理是数学中的一种重要方法,可以用来求解函数的极值问题。
•在弹性力学中,变分原理是用来求解物体的形变问题的一种方法。
•变分原理通过将弹性力学问题转化为一个变分问题,通过对变分方程进行求解,可以得到物体的形变情况。
弹性力学的变分原理•弹性力学的变分原理基于能量最小化的原理。
•变分原理假设物体的形变状态是能量最小的状态,通过对能量进行变分求解,可以求得物体的形变情况。
•变分原理可以用来推导出弹性力学中的重要方程,如弹性能量密度函数和应力-应变关系等。
变分原理的应用•变分原理在弹性力学中有着广泛的应用。
•变分原理可以用来推导出弹性力学中的基本方程,如胡克定律、拉梅定律和势能函数等。
•变分原理还可以用来求解复杂的边界值问题,如弹性体的静力平衡问题和弹性体的振动问题等。
弹性力学的变分原理应用案例•弹性体的静力平衡问题:通过变分原理可以求解弹性体在给定外力作用下的形变情况,并得到物体的位移场和应力场等信息。
•弹性体的振动问题:通过变分原理可以推导出物体的振动方程,并得到物体的共振频率和振动模态等信息。
•弹性体的材料参数求解:通过变分原理可以推导出物体材料的一些参数,如弹性模量和泊松比等。
总结弹性力学的变分原理是研究物体形变问题的重要方法,并且在弹性力学中有着广泛的应用。
通过对能量的变分求解,可以得到物体的形变情况和应力分布等重要信息。
变分原理不仅可以用来求解弹性体的静态问题,还可以用来求解弹性体的动态问题和材料参数等。
因此,掌握弹性力学的变分原理对于深入理解和应用弹性力学有着重要的意义。

弹性力学的基本原理弹性力学是研究物体在受力后能够恢复原状的力学分支。
它的基本原理可以总结如下:背景介绍弹性力学是力学学科的一个重要分支,研究物体受力后能够恢复原状的性质和行为。
弹性力学的研究对象可以是实物材料,如金属、塑料等,也可以是抽象的理想模型。
本文主要内容本文将讨论弹性力学的基本原理,包括以下几个方面:1. 倍力定律:弹性力学的基本原理之一是倍力定律。
倍力定律指出,在弹性变形范围内,物体受力与其变形之间存在着线性关系。
换句话说,物体受力越大,变形也越大,且两者之间成正比。
2. 弹性恢复:另一个基本原理是弹性恢复。
当外力作用于物体时,物体会变形,但在外力消失后,物体会努力恢复到原来的形状和尺寸。
这种恢复性质是弹性力学的核心特征。
3. 施加力和变形的关系:弹性力学研究物体受力后的变形情况。
在弹性力学中,施加力的方式和大小与物体的变形密切相关。
不同的力学作用方式将导致不同类型的变形,如拉伸、压缩、弯曲等。
4. 弹性模量:弹性力学的另一个关键概念是弹性模量。
弹性模量是衡量物体对外力的抵抗程度的指标。
不同材料具有不同的弹性模量,例如金属具有较高的弹性模量,而橡胶具有较低的弹性模量。
结论弹性力学的基本原理包括倍力定律、弹性恢复、施加力和变形的关系以及弹性模量等重要概念。
理解这些原理可以帮助我们更好地理解物体的弹性行为和性质。
请注意,本文的内容仅为简要介绍弹性力学的基本原理,详细的数学理论和推导过程超出了本文的范围。
参考文献:。
第十一章弹性力学的变分原理知识点静力可能的应力弹性体的功能关系功的互等定理弹性体的总势能虚应力应变余能函数应力变分方程最小余能原理的近似解法扭转问题最小余能近似解有限元原理与变分原理有限元原理的基本概念有限元整体分析几何可能的位移虚位移虚功原理最小势能原理瑞利-里茨(Rayleigh-Ritz)法伽辽金(Гапёркин)法最小余能原理平面问题最小余能近似解基于最小势能原理的近似计算方法基于最小余能原理的近似计算方法有限元单元分析一、内容介绍由于偏微分方程边值问题的求解在数学上的困难,因此对于弹性力学问题,只能采用半逆解方法得到个别问题解答。
一般问题的求解是十分困难的,甚至是不可能的。
因此,开发弹性力学的数值或者近似解法就具有极为重要的作用。
变分原理就是一种最有成效的近似解法,就其本质而言,是把弹性力学的基本方程的定解问题,转换为求解泛函的极值或者驻值问题,这样就将基本方程由偏微分方程的边值问题转换为线性代数方程组。
变分原理不仅是弹性力学近似解法的基础,而且也是数值计算方法,例如有限元方法等的理论基础。
本章将系统地介绍最小势能原理和最小余能原理,并且应用变分原理求解弹性力学问题。
最后,将介绍有限元方法的基本概念。
本章内容要求学习变分法数学基础知识,如果你没有学过上述课程,请学习附录3或者查阅参考资料。
二、重点1、几何可能的位移和静力可能的应力;2、弹性体的虚功原理;3、最小势能原理及其应用;4、最小余能原理及其应用;5、有限元原理的基本概念。
§11.1 弹性变形体的功能原理学习思路:本节讨论弹性体的功能原理。
能量原理为弹性力学开拓了新的求解思路,使得基本方程由数学上求解困难的偏微分方程边值问题转化为代数方程组。
而功能关系是能量原理的基础。
首先建立静力可能的应力和几何可能的位移概念;静力可能的应力和几何可能的位移可以是同一弹性体中的两种不同的受力状态和变形状态,二者彼此独立而且无任何关系。
第十一章 弹性力学的变分原理几何可能的位移虚位移 虚功原理 最小势能原理 瑞利-里茨 (Rayleigh-Ritz) 法 伽辽金(Γa∏epκuH )法最小余能原理 平面问题最小余能近似解 基于最小势能原理的近似计算方法 基于最小余能原理的近似计算方法 有限元单元分析一、内容介绍由于偏微分方程边值问题的求解在数学上的困难,因此对于弹性力学问题, 只能采用半逆解方法得到个别问题解答。
一般问题的求解是十分困难的, 甚至是 不可能的。
因此,开发弹性力学的数值或者近似解法就具有极为重要的作用。
变分原理就是一种最有成效的近似解法,就其本质而言,是把弹性力学的基 本方程的定解问题, 转换为求解泛函的极值或者驻值问题, 这样就将基本方程由 偏微分方程的边值问题转换为线性代数方程组。
变分原理不仅是弹性力学近似解 法的基础,而且也是数值计算方法,例如有限元方法等的理论基础。
本章将系统地介绍最小势能原理和最小余能原理, 并且应用变分原理求解弹 性力学问题。
最后,将介绍有限元方法的基本概念。
本章内容要求学习变分法数学基础知识,如果你没有学过上述课程,请学习 附录3或者查阅参考资料。
知识点 静力可能的应力 弹性体的功能关系 功的互等定理弹性体的总势能 虚应力应变余能函数 应力变分方程 最小余能原理的近似解法 扭转问题最小余能近似解 有限元原理与变分原理 有限元原理的基本概念 有限元整体分析、重点1几何可能的位移和静力可能的应力;2、弹性体的虚功原理;3、最小势能原理及其应用;4、最小余能原理及其应用;5、有限元原理的基本概念。
§11.1弹性变形体的功能原理学习思路:本节讨论弹性体的功能原理。
能量原理为弹性力学开拓了新的求解思路,使得基本方程由数学上求解困难的偏微分方程边值问题转化为代数方程组。
而功能关系是能量原理的基础。
(Tt UJ C首先建立静力可能的应力「:,和几何可能的位移’概念;静力可能的应力和几何可能的位移;可以是同一弹性体中的两种不同的受力状态和变形状态,二者彼此独立而且无任何关系。
建立弹性体的功能关系。
功能关系可以描述为:对于弹性体,外力在任意一组几何可能的位移上所做的功,等于任意一组静力可能的应力在与上述几何可能的位移对应的应变分量上所做的功。
学习要点:1、静力可能的应力;2、几何可能的位移;3、弹性体的功能关系;4、真实应力和位移分量表达的功能关系。
1、静力可能的应力假设弹性变形体的体积为V,包围此体积的表面积为S。
表面积为S可以分为两部分所组成:一部分是表面积的位移给定,称为S u;另外一部分是表面积的面力给定,称为S O如图所示显然S=S u+Sσ假设有一组应力分量Gj在弹性体内部满足平衡微分方程% +伦=°在面力已知的边界S二,满足面力边界条件F辐二S这一组应力分量称为静力可能的应力。
静力可能的应力未必是真实的应力,因为真实的应力还必须满足应力表达的变形协调方程,但是真实的应力分量必然是静力可能的应力。
为了区别于真实的应力分量,我们用表示静力可能的应力分量。
2、几何可能的位移假设有一组位移分量U i和与其对应的应变分量;ij ,它们在弹性体内部满足几何方程在位移已知的边界S U上,满足位移边界条件这一组位移称为几何可能的位移。
几何可能的位移未必是真实的位移,因为真实的位移还必须在弹性体内部满足位移表示的平衡微分方程;在面力已知的边界S匚上,必须满足以位移表示的面力边界条件。
但是,真实的位移必然是几何可能的。
为了区别于真实的位移,用;表示几何可能的位移。
几何可能的位移产生的应变分量记作二3、弹性体的功能关系对于上述的静力可能的应力■»,、几何可能的位移;以及其对应的应变分量% ,设F bi和F S分别表示物体单位体积的体力和单位面积的面力(面力也包括在位移边界S的约束反力)。
则不难证明,有以下恒等式证明:由于匚和二满足几何方程,而且应力),是对称的,所以将上式代入等式的右边,并且利用高斯积分公式,可得由于),满足面力边界条件,上式的第一个积分为由于),满足平衡微分方程,所以第二个积分为∫∫∫吗H西AJJJ恥Wy V将上述结果回代,可以证明公式∫∫∫ 耳諾非÷∫∫= ∫∫∫< ⅛眇为恒等F 5 F式O4、真实应力和位移分量表达的功能关系公式揭示了弹性体的功能关系。
¥S 7功能关系可以描述为:对于弹性体,外力在任意一组几何可能位移上所做的功,等于任意一组静力可能应力在上述几何可能位移对应的应变分量上所做的功。
这里需要强调指出的是:对于功能关系的证明,没有涉及材料的性质,因此适用于任何材料。
当然,证明时使用了小变形假设,因此必须是满足小变形条件。
其次,功能关系中,静力可能的应力 ),、几何可能的位移J以及其对应的应变分量J ,可以是同一弹性体中的两种不同的受力状态和变形状态,二者彼此独立而且无任何关系。
假如静力可能的应力Y:‘和几何可能的应变分量"满足材料本构方程时,则对应的静力可能的应力和几何可能的位移厂以及其对应的应变分量二均成为真实的应力,位移和应变分量。
对于真实的应力,位移和应变分量,功能关系为JJJ心「"二-皿恥WF ^ P r^显然这是应变能表达式。
不过在应变能公式中,假设外力,即体力和面力是由零缓慢地增加到最后的数值的,因此应变能关系式中有1/2。
而在功能关系公式的推导中,并没有这一加载限制。
功能关系是弹性力学中的一个普遍的能量关系,这一原理将用于推导其它的弹性力学变分原理。
§11.2变形体的虚功原理学习思路:本节讨论的重点是弹性体的虚功原理。
首先定义虚位移概念,通过将几何可能的位移定义为真实位移与虚位移的和,可以确定虚位移是位移边界条件所容许的位移微小改变量。
对于虚位移所产生的虚应变,记作Xj 。
根据弹性体的功能关系,可以得到虚功方程表达式W = U。
虚功方程的意义为:如果弹性体是处于静力平衡状态的,外力在虚位移上所做的虚功,等于真实应力分量在对应的虚应变上所做的虚功,即虚应变能。
这就是虚功原理。
虚功原理等价于平衡微分方程和面力边界条件,它满足了静力平衡的要求。
学习要点:1、虚位移与虚应变;2、虚功原理;3、虚功原理的意义。
1、虚位移与虚应变功是指力与力作用点处沿力方向位移的乘积。
显然,功包括力和位移两个基本量。
如果力或者应力在其自身引起的真实位移或者应变上作功,这种功称为实功;如果力或者应力在其他某种原因引起的微小位移或者应变上作功,这种功称为虚功。
设几何可能的位移为饥:=U i这里U i为真实位移,称为虚位移。
虚位移是位移边界条件所容许的位移的微小改变量。
由于几何可能的位移在边界S U上,应该满足位移边界条件,因此,边界S u,有δ U i=O将几何可能位移公式代入几何方程⅛ = I(WL+⅛J = ∣(⅛ J +⅛ I) ■*■扣% J + 3 % J)显然,上式右边的第一项是真实应变,而第二项是虚位移所产生的虚应变,记作Ij。
因此,上式可以写作几何可能的位移对应的应变可以用真实应变与虚位移所产生的虚应变之和表示。
2、虚功原理如果用虚位移表达的几何可能位移' I1丄、和真实应力作为静力可能应力代入功能关系表达式,注意到F Z P F真实应力和位移是满足功能关系的,因此可以得到用虚位移U i和虚应变;ij表达的虚功方程上式中应力分量为实际应力。
注意到在位移边界SU上,虚位移是恒等于零的, 所以在上述面积分中仅需要在面力边界S:土完成。
就力学意义而言,虚功原理表达式的等号的左边为外力在虚位移中所做的功,称为外力虚功:W ;右边为应力分量在虚位移对应的虚应变上产生的应变能, 称为虚应变能:U。
即根据上述分析,可以得出结论:如果弹性体是处于静力平衡状态的,对于满足变形连续条件的虚位移及其虚应变而言,外力在虚位移上所做的虚功,等于真实应力分量在对应的虚应变上所做的虚功,即虚应变能。
这就是虚功原理。
3、虚功原理的意义∫∫∫+ FM K AS= JjJ乐矶d V对于虚功方程「' ,其右边的积分可以写作j]¼t叽+吟丿(I心⅛√讥> 声+訓5(叫)評F=JjkQS = ∫∫∫(σ^ U i))声-JjJ% ∕¾ W = JjV≠ 诃-JJJ% / 堆AV上式在推导中应用了在位移边界S U上,「□ = 0的边界条件。
现在将上式回代到虚功方程,整理可得df z+ ∫∣(兀一σ^n.)δ U i dS=O因为虚位移U i是任意的,因此上式的成立,要求在弹性体内在位移已知边界S U上,有© 二M显然,虚功原理等价于平衡微分方程和面力边界条件,它满足了静力平衡的要求。
应该指出:虚功原理的推导并没有涉及任何材料性质,因此适用于任何材料。
当然,由于使用了小变形假设,即线性的几何方程,因此虚功原理必须是在小变形条件下适用于任何材料。
除此以外应力和应变分量之间不需要满足任何关系。
§11.3功的互等定理学习思路:本节讨论功的互等定理。
定理的证明比较简单,将功能方程应用于同一弹性体的两种不同的受力和变形状态,则可以得到功的互等定理。
它是弹性体功能原理的另一种应用形式。
功的互等定理可以描述为:作用在弹性体上的第一种状态的外力,包括体力和面力,在第二种状态外力对应的位移上所做的功为例,等于第二种状态的外力在第一种状态对应的位移上所做的功。
功的互等定理是一个十分重要的力学概念。
它的应用可以帮助我们推导和理解有关的有关的力学公式和概念,同时也可以直接用于求解某些弹性力学问题。
学习要点:1、功的互等定理1、功的互等定理如果将功能方程工M「〔山「「二L一ιliτ「匚应用于同一弹性体VSV的两种不同的受力和变形状态,贝U可以得到功的互等定理。
假设第一种状态的体力为在面力边界上的面力为■,在位移已知的边界SU的位移为r ,弹性体内部的应力,应变和位移分别为 J ;第二种状态的体力,面力,应力,应变和位移分别为,「八,环时。
由于两种状态的应力和应变分量都是真实解,所以它们当然也就是静力可能的和几何可能的。
现在把第一种状态的应力作为静力可能的应力,而把第二种状态的位移和应变作为几何可能的位移和应变。
将上述两种状态的应力和位移分别代入功能方程,有JJJ時和八JJ>扭仏二Jj>锐"同理,把第二种状态的应力取为静力可能的应力,而把第一种状态的位移和应变作为几何可能的位移和应变分别代入功能方程,有∫∫∫ ⅛11<J^+∫∫ 心JJJ 或WW对于上述公式的右边,由于∫∫∫ ⅛dΓ-∫∫∫ b;可Wl]jF y 八*所以df7+ ∫∫ F^dS -上式称为功的互等定理。
功的互等定理可以叙述为:作用在弹性体上的第一种状态的外力,包括体力和面力,在第二种状态对应的位移上所做的功等于第二种状态的外力在第一种状态对应的位移上所做的功。