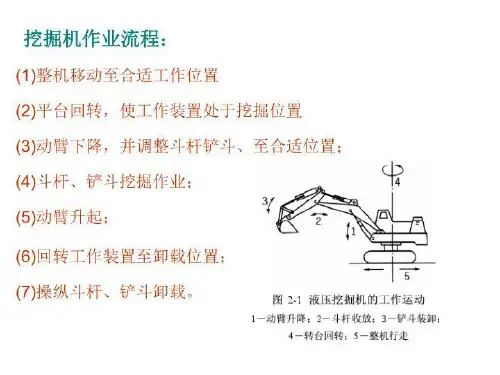
挖掘机工作装置
- 格式:doc
- 大小:2.74 MB
- 文档页数:66
太原科技大学本科毕业设计说明书EXS 3500液压挖掘机正铲工作装置装设计The Working Device Design of EXS 3500 Crawler Face-shovel Bucket Hydraulic Excavator学院 (系 :机械工程学院专业:机械制造及自动化(工机学生姓名:学号:指导教师:史青录评阅教师:完成日期:2015.06.15太原科技大学Taiyuan University of Science and Technology太原科技大学毕业设计(论文任务书(由指导教师填写发给学生学院(直属系 :机械工程时间: 15年 3月 9 日摘要挖掘机械是工程作业机械的一种重要类型,是开挖土石方的主要机械设备,正铲单斗液压挖掘机是一种以铲斗进行挖掘作业并采用液压传动的机械设备。
工作装置是液压挖掘机的执行机构,从总体来看常见的正铲工作装置属于平面连杆机构,铲斗、动臂和斗杆之间采用铰接的方式,在液压缸推力的作用下各部件围绕铰接点摆动,完成卸土、挖掘和提升等动作,常用的液压挖掘机的工作装置有正铲,反铲,装载, 抓斗和起重装置。
本次设计主要内容是 EXS 3500正铲液压挖掘机工作装置的设计,主要对挖掘机工作装置机构的几何参数进行计算设计,采用合适的调整方法使其达到设计要求;对动臂、斗杆进行强度校核和载荷分析,使其满足使用要求。
在本次设计中应该注意工作装置设计的原则,在满足各部件要求的条件下实现6.06米最大挖掘深度, 15.81米最大挖掘半径, 12.42米最大卸载高度, 17.17米最大挖掘高度, 以实现挖掘的功能。
关键词:设计;挖掘机;强度校核;正铲工作装置the Working Device Design of EXS 3500 Crawler Face-shovel Hydraulic ExcavatorAbstractShovel machinery is a major type of construction Machinery, which is major earth excavation equipment. Single Bucket Hydraulic shovel is a mechanical which reliance on hydraulic transmission with the bucket to carry out excavation work. Hydraulic shovel working device are commonly backhoe, hoe, loading, grab and lifting gear.The design principal is to design an EXS 3500 crawler face-shovel hydraulic excavator working device. And major working device geometry parameters are designed; checked hydraulic cylinder locking power .Use the appropriate method of adjustment to meet the requirement. Check boom and rod strength to meet the requirements.Design principles work should be noted in the design of device. all components must be meet the conditions, machine for maximum digging depth of 6.06 meters, radius of the largest mining of 15.81 meters, uninstall the greatest height of 12.42 meters, maximum cutting height of 17.17 meters, to achieve the functions of excavation.Keyword :Design;Excavator; Strength Check; face-shovel working device目录摘要 . (II)Abstract .................................................................................................................................I II 第 1章引言 ........................................................................................................................ 1 1.1挖掘机和工作装置概述 . .................................................................................... 1 1.2国内外研究现状 . ................................................................................................ 1 1.3液压挖掘机的发展前景 . .................................................................................... 2第 2章原始数据及设计要求 ............................................................................................ 4 2.1原始参数 . ............................................................................................................ 4 2.2工作装置设计原则 . ............................................................................................ 5第 3章工作装置总体方案选择 ........................................................................................ 6 3.1工作装置构成 . .................................................................................................... 6 3.2动臂及斗杆的结构形式的初选 . ........................................................................ 7 3.3动臂与动臂油缸的布置 . .................................................................................... 7 3.4铲斗与铲斗油缸的连接方式 . ............................................................................ 8第 4章工作装置机构参数的选择 .................................................................................... 9 4.1最大挖掘深度1h 校核 (10)4.2最大挖掘高度2h 校核: (11)4.3最大卸载高度3h 校核 (13)4.4最大挖掘半径1r 校核 (14)4.5斗杆最大挖掘力aF 校核 (15)4.6铲斗最大挖掘力bF 校核 .................................................................................. 17第 5章工作装置运动分析及包络图的绘制 .................................................................. 19 5.1动臂运动分析 . .................................................................................................. 19 5.2斗杆运动分析 . .................................................................................................. 20 5.3包络图的绘制 . .................................................................................................. 21第 6章工作装置主要部件的结构校核 .......................................................................... 23 6.1斗杆 . .................................................................................................................. 23 6.1.1工况一 ........................................................................................................ 23 6.1.2工况二 ........................................................................................................ 26 6.2动臂 . .................................................................................................................. 28 6.2.1工况一 ........................................................................................................ 29 6.2.2工况二 ........................................................................................................ 31 6.3销轴校核 . .......................................................................................................... 33总结 . ......................................................................................................................................34EXS 3500液压挖掘机正铲工作装置装设计参考文献 (35附录A 文献翻译原文 (36附录B 文献翻译中文 (44致谢 (49第1章引言1.1挖掘机和工作装置概述挖掘机在农田水利以及快速抢修等物料挖掘、搬移方面以及机场、港口、矿山、油田、城乡建设中得到了充分的利用,发挥了其他机械不可替代的关键作用。
研究内容:1、工作装置机构的几何参数设计2、各主要工作尺寸验算3、工作装置各部件运动及受力分析、工作装置挖掘性能分析4、各液压缸闭锁力验算5、动臂机构、斗杆机构的结构设计6、动臂、斗杆强度校核研究方法:采用静力学原理和机构几何学原理,对挖掘工作装置进行应用研究。
原始参数:表1-1 原始参数表技术要求:对工作装置的参数和几何构进行研究设计,设计尺寸达到要求;主要工作尺寸误差不得大3%;对动臂、斗杆进行强度校核。
工作装置应满足以下要求:1.主要工作尺寸及工作范围满足使用要求。
在设计反铲装置时要考虑与同类型机器相比的先进性,考虑国家标准的规定,并注意到运动参数受机构碰撞限制等的可能性。
2.整机挖掘力的大小及其分布情况应满足使用要求,并且有一定的先进性。
3.作业条件复杂,使用情况多变时应考虑工作装置的通用性,采用变铰点结构或配套机构时,要注意分清主次。
要满足使用要求的前提下,力求替换构件种类少,结构简单,换装方便。
4.工作装置结构形式和布置要便于装卸和维修,尤其应便于易损件的更换。
动臂是工作装置的主要构件,反铲动臂可分为整体式和组合式两类。
整体式动臂有直动臂和弯动臂两种。
直动臂构造简单,轻巧,布置紧凑,主要用于悬挂式挖掘机。
整体式动臂结构简单,价廉,刚度相同时结构重量轻于组合式动臂。
动臂液压缸的布置方案如图所示,动臂液压缸装于动臂的上方这个方案的特点是动臂下降幅度较大,在挖掘时动臂液压缸往往处于受压状态,闭锁能力较强。
动臂提升时液压缸小腔进油,提升速度也较快。
为了统一缸径和液压缸的闭锁能力,双动臂液压缸的方案采用渐多。
有些悬挂式动臂液压缸布置时考虑到不破坏动臂箱型截面,且不与斗杆液压缸碰撞,也采用双缸,斗杆液压缸一般只用一个。
但大多数动臂液压缸还是采用单缸。
本设计采用在上方布置的单动臂液压缸。
第二节铲斗总体方案的选择铲斗与铲斗液压缸的连接有三种形式,如下图所示,其区别主要在于液压缸活塞杆端部与铲斗的连接方式不同。

三、工作装置各部分的基本尺寸计算和验证反铲装置的合理设计问题至今尚未理想地解决。
以往多按经验,采取统计和作周试凑的方法,现在则尽可能采用数解分析方法。
液压挖掘机基本参数是表示和衡量挖掘机性能的重要指标,本文主要计算和验证铲斗、动臂、斗杆的尺寸。
(一)反铲装置总体方案的选择反铲装量总体方案的选择包括以下方面:1、动臂及动臂液压缸的布置确定用组合式或整体式动臂,以及组合式动臂的组合方式或整体式动臂的形状动臂液压缸的布置为悬挂式或是下置式。
2、斗杆及斗杆液压缸的布置确定用整体式或组合式斗扦,以及组合式斗杆的组合方式或整体式斗扦是否采用变铰点调节。
3、确定动臂与斗杆的长度比,即特性参数K1 l1 l2 。
对于一定的工作尺寸而言,动臂与斗杆之间的长度比可在很大范围内选择。
—般当K1> 2时(有的反铲取K1>3)称为长动臂短斗杆方案,当K1<1.5 时属于短动比长斗杆力案。
K1在1.5~2 之间称为中间比例方案。
要求适用性较强而又无配套替换构件或可调结构的反铲常取中间比例方案。
4、确定配套铲斗的种类、斗容量及其主参数,并考虑铲斗连杆机构传动比是否需要调节。
5、根据液压系统工作压力、流量、系统回路供油方式、工厂制造条件等确定各液压缸缸数、缸径、全伸长度与全纳长度之比λ。
考虑到结构尺寸、运动余量、稳定性和构件运动幅度等因素一般取λ1=1.6~1.7。
取λ2=1.6~1.7;λ3=1.5~1.7。
(二)斗形主要参数的确定当铲斗容量q 一定时,挖掘转角2 ,挖掘半径R和平均斗宽B 之间存在一定的关系,即具有尺寸R和B 的铲斗转过2 角度所切下的土壤刚好装满铲斗,于是斗容量可按下式计12q R2B(2 sin2 )K s算:2(4.1)式中:K s ——土壤松散系数。
(取K s 1.25 )一般取: (1.0~1.4) 3q (4.2)R的取值范围:(1.3~1.6) 3q (4.3)式中:q ——铲斗容量,m3;B ——铲斗平均宽度,m。
![毕业设计(论文)-小型液压挖掘机挖掘工作装置设计[管理资料]](https://uimg.taocdn.com/2b2898a177232f60dccca134.webp)
小型液压挖掘机挖掘工作装置设计摘要挖掘机广泛的应用于建筑行业,排水灌溉,采矿,清除障碍和露天开矿等各种场合。
它对减轻繁重的体力劳动,保证工程的质量,加快建设的速度,提高劳动的生产率起到了巨大的作用。
随着液压传动的技术在工程机械上广泛应用,单斗液压挖掘机也有了迅速的发展。
液压挖掘机具有质量轻、体积小、结构紧凑、挖掘力大、操纵轻便,以及易实现无级变速和自动控制等一系列的优点。
为了能满足不同的作业要求,其工作装置也有很多类型。
例如:正铲,反铲,牵引绳,塔式等。
在上述的工作装置中,反铲挖掘机应用的最为广泛,因而合理设计工作装置具有十分重要的意义。
本论文主要对由动臂、斗杆、铲斗、连杆机构等组成的小型液压挖掘机工作装置进行设计。
具体内容包括以下的五部分: 挖掘机工作装置的总体设计;挖掘机的工作装置详细的机构运动学分析;工作装置各部分的基本尺寸的计算和验证;工作装置主要部件的结构设计。
通过静强度与动强度分析,得出了工作装置在静载荷下结构是安全的。
并利用同类机械的的参数做相应的调试,得出一套较合理的参数,为后续的工作打好了基础。
关键词:挖掘机;液压;动臂;斗杆;铲斗THE DESIGN OF WORKING DEVICE OF SMALLHYDRAULIC EXCA VATORABSTRACTExcavators are widely used in all branches of constructions, to drain and irrigate land, extract useful minerals, the removal of obstacle and the open-cast excavation of coal and ore. They play a tremendous role in relieving labor force, ensuring project quality, accelerating the speed of construction and improving the labor productivity.With the great development of hydraulic technology, the single buckethydraulic excavator has been improving greatly. The hydraulic excavator is provided a great many advantages,such as light weight, small volume, compact structure, powerful dig force, easy operate, continuous variable velocity, automatic controls and so order to meet the different requirements, the working device also has many types. For example: dipper shovel, pull shovel,dragline, jib crane, tower crane and so the above work device, backhoe excavator is used most widely, so the rational design of work device is of great significance.In this paper, mainly by the boom, bucket rod, bucket, excavator linkage component of small hydraulic excavator working device design. It includes thefollowing several parts:the overall design of excavator work device; excavator working device detailed kinematics analysis; the basic size calculation and verification of each part of Working device ; Through the static strength and dynamic strength analysis, the device under static loading structure is safe. Use the same mechanical parameters of the commissioning, to derive a set of reasonable parameters, for the follow-up work to lay a good foundation.KeyWord: Excavator; Hydraulic; Movable arm,Dipper,Bucket目录1 绪论 (1)课题设计的背景和意义 (1)挖掘机的行业现状 (1)挖掘机技术发展趋势 (2)工程机械的前景展望 (3)2 小型液压挖掘机反铲工作装置结构方案设计 (3)引言 (3)液压挖掘机的工作原理与基本组成分析 (3)反铲工作装置的结构设计方案分析 (5)反铲工作装置的结构形式及结构特点 (5)本章小结 (7)3 小型液压挖掘机反铲工作装置参数设计 (7)工作装置的设计原则与参数说明 (7)反铲工作装置的设计原则 (7)机构自身的几何参数设计 (8)反铲工作装置几何参数的设计计算 (8)铲斗机构主要参数的设计计算过程 (8)动臂结构参数的计算过程 (9) (13)铲斗机构及铲斗液压缸主要参数的设计过程 (15)动臂液压缸的设计计算 (18)液压系统闭锁压力的确定分析 (20)4 反铲工作装置的载荷分析计算 (21)工况分析以及确定不利工况 (21)第一种工况位置下动臂和斗杆受力分析计算 (24)第二种工况位置下动臂和斗杆受力分析计算 (28)第三种工况位置下动臂和斗杆受力分析计算 (32)斗杆内力图分析 (37)动臂内力图分析 (38)5 挖掘机工作装置截面尺寸的设计与校核 (40)工作装置斗杆截面尺寸的设计与校核 (41)斗杆的强度校核 (41)斗杆稳定性校核 (42)铰座挤压强度校核 (42)动臂截面尺寸设计与校核 (43)动臂强度校核 (44)动臂稳定性校核 (46)铰座的挤压强度校核 (46)6 结论 (58)参考文献 (59)致谢 (50)1 绪论课题设计的背景和意义总所周知,我国是一个发展中的国家,在其广阔的土地上正在进行着大规模经济建设,这就需要很多土石方施工机械为建设服务,而我们知道液压挖掘机是一类最重要的土石方的施工机械。
第一章绪论1. 1 液压挖掘机的组成、分类、作用和特点挖掘机由转台及转台上部机构、底架及行走系、与工作装置等三大部分构成。
转台上布置了发动机、主轴泵及驾驶室等,经由回转滚盘装在底架之上。
工作装置的动臂铰支于转台上。
转台可绕底架的垂直面内绕其铰点作一定的转动。
它的工作过程是以铲斗的切削刃切削土壤,铲斗装满后提升、回转至卸土位置,卸空后的铲斗再回到挖掘位置并开始下一次的作业。
因此,液压挖掘机是一种周期作业的土方机械。
【7】液压挖掘机的分类有很多种:根据行走装置传动型式分:全液压式,半液压式;根据不同的行走系分:履带式、轮胎式、汽车式和悬挂式;根据主要用途和工作装置的不同分:通用型和专用型;根据工作装置的结构不同分:铰接式和伸缩臂式等。
挖掘机械在建筑机械发展中占有很大比重和重要的地位,是重点发展的机械品种之一、尤其是中小型、通用的单斗挖掘机不仅用于土石方的挖掘工作,而且通过工作装置的更换,还可以用作起重、装载、抓取、打桩、钻孔等多种作业,它在各种工程施工中用途更大,已成为机械化施工中广泛使用的不可缺少的机械设备。
由于液压挖掘机具有质量小,挖掘力大,工作平稳,效率高,操纵灵活,机动性好等优点,单斗液压挖掘机由于在动力装置和工作装置之间采用容积式液压传动,靠液体的压力能进行工作,因此,与机械传动相比有许多优点:能无级调速且调速范围大(最高与最低速度之比可达1000:1);能得到较低的稳定转速(采用柱塞式油马达,稳定转速可低到1转/分);快速作用时,液压元件产生的惯性较小,并可作高速反转(电动机回转部分的起动力矩比其工作力矩大50%,而油马达则不大于5%)。
加速中等功率电动机需1秒钟到数秒钟,而加速油马达只需0.1秒;传动平稳,结构简单,可吸收冲击和振动;操纵省力,易实现自动化控制;易实现标准化、通用化、系列化。
单斗液m液压挖掘机斗齿切削力为12~压挖掘机与同级机械传动挖掘机相比,挖掘力高30%左右(如:1.0315吨,而同级机械传动挖掘机只有10吨左右)。
挖机的工作原理挖机,也称为挖掘机,是一种用于挖掘土壤、矿石和其他材料的重型机械设备。
挖机的工作原理是通过液压系统驱动液压缸进行动作,实现挖掘、装载、卸载等操作。
下面将详细介绍挖机的工作原理。
一、液压系统1.1 液压泵:液压泵是挖机液压系统的动力源,通过驱动液压油流动产生高压油液,为液压缸提供动力。
1.2 液压缸:液压缸是挖机的执行元件,通过液压油的压力驱动活塞运动,实现挖掘、卸载等操作。
1.3 液压阀:液压阀是控制液压油流向的装置,通过控制液压阀的开关状态,可以实现挖机各种功能的控制。
二、工作装置2.1 铲斗:挖机的主要工作装置是铲斗,通过液压缸的动作,铲斗可以实现挖掘、装载、卸载等操作。
2.2 铲斗杆:铲斗杆是连接铲斗和挖机主体的部件,通过液压缸的伸缩,可以改变铲斗的位置和角度。
2.3 回转机构:挖机的回转机构通过液压马达驱动,实现挖机的回转动作,使铲斗能够在360度范围内作业。
三、动力系统3.1 发动机:挖机的动力来源是内燃机,通过燃油燃烧产生动力,驱动液压泵和其他机械部件运转。
3.2 驱动系统:挖机的驱动系统包括行走和转向系统,通过液压马达驱动履带或轮胎运动,实现挖机的行走和转向。
3.3 冷却系统:挖机的发动机和液压系统会产生大量热量,在工作过程中需要通过冷却系统散热,保持设备正常运行。
四、控制系统4.1 操纵台:挖机的操纵台上设有各种操纵杆和按钮,操作员可以通过操纵台控制挖机的各项功能。
4.2 传感器:挖机上装有各种传感器,可以监测挖机的工作状态和环境情况,确保挖机安全高效地运行。
4.3 控制器:挖机的控制器负责接收传感器信息,并根据预设的程序控制液压系统和其他部件的工作,实现挖机的自动化操作。
五、安全系统5.1 报警系统:挖机上装有各种报警器和指示灯,可以在发生故障或危险情况时发出警报,提醒操作员及时处理。
5.2 防护装置:挖机的铲斗和其他部件上装有防护装置,可以保护操作员和周围环境免受意外伤害。
挖掘机工作装置的分类和使用方法挖掘机是一种常见的工程机械设备,主要用于挖掘土壤、破碎岩石和运输材料。
挖掘机的工作装置是实现以上功能的关键部分之一。
工作装置的分类和使用方法对挖掘机的工作效率和安全性具有重要影响。
本文将介绍挖掘机工作装置的分类和使用方法,以帮助读者更好地了解和使用挖掘机。
一、挖掘机工作装置的分类挖掘机的工作装置按照功能和结构可以分为以下几类:挖掘装置、装卸装置、平整装置和其他特殊装置。
1. 挖掘装置:挖掘装置是挖掘机最基本的工作装置,用于开挖和挖掘作业。
挖掘装置通常由斗杆、斗杆缸、斗杆连接杆、斗杆支撑杆、斗杆锁紧装置以及斗杆液压系统组成。
挖掘装置的作用是通过斗杆和斗杆缸实现斗的升降和倾斜。
2. 装卸装置:装卸装置主要用于装卸作业和物料搬运。
常见的装卸装置有抓斗装置和钩装置。
抓斗装置通过液压缸的作用,实现夹取和释放物料。
钩装置主要用于悬挂和搬运重物,通过杠杆原理提供机械力来完成工作。
3. 平整装置:平整装置用于地面平整和整理工作。
平整装置通常由刮板和刮板液压缸组成。
刮板装置通过刮板液压缸的作用,控制刮板的升降和倾斜,以实现地面平整和整理。
4. 其他特殊装置:除了以上常见的工作装置,挖掘机还可以配备其他特殊装置来适应不同的工作需求。
例如,破碎锤装置用于岩石破碎,钻孔装置用于地下钻探等。
二、挖掘机工作装置的使用方法挖掘机的工作装置使用方法因具体工作装置的不同而有所差异。
下面以挖掘装置和装卸装置为例,介绍挖掘机工作装置的使用方法。
1. 挖掘装置的使用方法:(1)启动挖掘机,确保液压系统正常运行。
(2)通过挖掘机的操纵杆控制斗杆的上升和下降,实现挖掘深度的控制。
(3)通过挖掘机的操纵杆控制斗杆的倾斜,实现挖掘斗的倾斜角度的调整。
(4)挖掘完毕后,通过挖掘机的操纵杆控制斗杆的下降,将挖取的物料倾倒到指定位置。
2. 装卸装置的使用方法:(1)启动挖掘机,确保液压系统正常运行。
(2)通过挖掘机的操纵杆控制抓斗的张合,实现物料的夹取和释放。
挖掘机知识点总结挖掘机是一种大型建筑机械,主要用于土方作业、挖掘和运输土石料等工程。
它以其高效、大力、灵活等特点,在建筑、市政、矿山等领域得到广泛应用。
挖掘机作为一种多功能、高效的工程机械,其技术和性能不断得到提升和改进。
下面将从挖掘机的结构、工作原理、维护保养以及应用领域等方面来对挖掘机进行详细的解析。
一、挖掘机的结构挖掘机主要由动力系统、液压系统、操作系统、工作装置、行走装置、驾驶室等多个部分组成。
1.动力系统:挖掘机的动力系统通常由柴油发动机、液压泵、油箱、散热系统等组成。
柴油发动机作为挖掘机的动力源,其功率大小直接影响到挖掘机的工作性能。
液压泵负责将柴油发动机产生的动力传递到液压系统中,从而驱动液压缸、液压马达等液压执行部件进行工作。
2.液压系统:挖掘机的液压系统主要由液压泵、液压缸、液压马达、液压管路、液压阀等组成。
液压系统通过传递液压油将动力转化为机械运动能力,实现挖掘机的各项工作功能,如起升、提升、摆动、翻转等。
3.操作系统:挖掘机的操作系统包括操纵杆、脚踏板、行走控制器、转台控制器等。
操作系统是挖掘机的控制中枢,通过操纵杆和控制器来操作挖掘机的各项功能。
4.工作装置:挖掘机的工作装置通常包括挖斗、抓斗、锤具等工作装置。
不同类型的挖掘机的工作装置也会有所不同,但其基本功能是进行挖掘、装载和卸载工作。
5.行走装置:挖掘机的行走装置通常由履带、行走马达、行走齿轮等组成。
行走装置能使挖掘机在工地上灵活移动,适应不同的工作现场要求。
6.驾驶室:挖掘机的驾驶室是挖掘机操作员的工作空间,通常包括座椅、方向盘、控制台、显示屏等设备。
操作员通过驾驶室内的各种设备来控制挖掘机的工作状态和动作。
以上就是挖掘机的基本结构,不同制造商生产的挖掘机在结构和部件上可能会有所不同,但总体上都符合上述基本结构。
二、挖掘机的工作原理挖掘机的工作原理主要是通过液压系统来实现的,其基本的工作原理是利用液体的不可压缩性和液压传动原理来实现各项工作功能。
挖掘机零件分类
1. 工作装置部件:挖斗、挖掘臂、转台、刀盘、液压缸、工作装置底座等。
2. 驱动系统部件:发动机、液压马达、液压泵、传动轴、链条、液压传动系统等。
3. 行走系统部件:行走马达、行走轮、履带链、履带板、行走驱动器等。
4. 控制系统部件:控制阀、液压控制系统、操纵杆、电子控制模块、传感器等。
5. 电子设备部件:仪表盘、控制面板、灯具、电池、电线等。
6. 保护装置部件:护板、防护网、防撞装置、遮阳棚等。
7. 液压系统部件:油缸、油箱、油管、油泵、滤清器、管道等。
8. 底盘部件:底盘框架、承载轴承、支撑点、固定螺栓等。
9. 附件部件:附属工具、夹具、挖掘斗齿、装卸装置等。
10. 散热系统部件:散热器、冷却风机、散热液等。
以上是挖掘机零件的分类,提供给您参考。
请注意,这些分类只是普通的分类方式,并不涉及具体的零件名称。
如需了解真实名称和引用,请参考挖掘机零件相关的官方文档或咨询专业人士。
挖掘机工作装置目录1绪论 (1)1.1课题背景及目的 (1)1.2国内外研究状况 (1)1.3 课题研究方法 (2)1.4 论文构成及研究内容 (2)2总体方案设计 (3)2.1 工作装置构成 (3)2.2 动臂及斗杆的结构形式 (5)2.3 动臂油缸与铲斗油缸的布置 (5)2. 4 铲斗与铲斗油缸的连接方式 (6)2.5 铲斗的结构选择 (6)2.6 原始几何参数的确定 (7)3 工作装置运动学分析 (9)3.1 动臂运动分析 (9)3.2 斗杆的运动分析 (10)3. 3 铲斗的运动分析 (11)3.4 特殊工作位置计算: (15)4基本尺寸的确定 (19)4.1 斗形参数的确定 (19)4.2 动臂机构参数的选择 (19)4.2.1 α1与A点坐标的选取 (19)4.2.2 l1与l2的选择 (20)4.2.3 l41与l42的计算 (20)4.2.4 l5的计算 (20)4.3 动臂机构基本参数的校核 (22)4.3.1 动臂机构闭锁力的校核 (22)4.3.2 满斗处于最大挖掘半径时动臂油缸提升力矩的校核 (24)4.3.3 满斗处于最大高度时,动臂提升力矩的校核 (25)4.4 斗杆机构基本参数的选择 (26)4.5 铲斗机构基本参数的选择 (27)4.5.1 转角范围 (27)4.5.2 铲斗机构其它基本参数的计算 (27)5工作装置结构设计 (30)5.1斗杆的结构设计 (30)5.1.1 斗杆的受力分析 (30)5.1.2 结构尺寸的计算 (40)5.2动臂结构设计 (42)5.2.1第一工况位置 (42)5.2.2 第二工况位置: (47)5.2.3内力图和弯矩图的求解: (50)5.3 铲斗的设计 (56)5.3.1铲斗斗形尺寸的设计 (56)5.3.2铲斗斗齿的结构计算: (57)5.3.3 铲斗的绘制: (57)6 销轴与衬套的设计 (59)6.1 销轴的设计 (59)6.2 销轴用螺栓的设计: (59)6.3 衬套的设计: (59)7 总结 (61)参考文献 (62)致谢 (63)附件一开题报告 (64)附件二外文翻译 (70)挖掘机工作装置结构设计1绪论1.1课题背景及目的挖掘机在国民经济建设的许多行业被广泛地采用,如工业与民用建筑、交通运输、水利电气工程、农田改造、矿山采掘以及现代化军事工程等等行业的机械化施工中。
据统计,一般工程施工中约有60%的土方量、露天矿山中80%的剥离量和采掘量是用挖掘机完成的。
随着我国基础设施建设的深入和在建设中挖掘机的广泛应用,挖掘机市场有着广阔的发展空间,因此发展满足我国国情所需要的挖掘机是十分必要的。
而工作装置作为挖掘机的重要组成部分,对其研究和控制是对整机开发的基础。
反铲式单斗液压挖掘机工作装置是一个较复杂的空间机构,国内外对其运动分析、机构和结构参数优化设计方面都作了较深入的研究,具体的设计特别是中型挖掘机的设计已经趋于成熟。
而关于反铲式单斗液压挖掘机的相关文献也很多,这些文献从不同侧面对工作装置的设计进行了论述。
而笔者的设计知识和水平还只是一个学步的孩子,进行本课题的设计是为对挖掘机的工作装置设计有一些大体的认识,巩固所学的知识和提高设计能力。
1.2国内外研究状况当前,国际上挖掘机的生产正向大型化、微型化、多能化和专用化的方向发展。
国外挖掘机行业重视采用新技术、新工艺、新结构和新材料,加快了向标准化、系列化、通用化发展的步伐。
我国己经形成了挖掘机的系列化生产,近年来还开发了许多新产品,引进了国外的一些先进的生产率较高的挖掘机型号[1]。
由于使用性能、技术指标和经济指标上的优越,世界上许多国家,特别是工业发达国家,都在大力发展单斗液压挖掘机。
目前,单斗液压挖掘机的发展着眼于动力和传动系统的改进以达到高效节能;应用范围不断扩大,成本不断降低,向标准化、模块化发展,以提高零部件、配件的可靠性,从而保证整机的可靠性;电子计算机监测与控制,实现机电一体化;提高机械作业性能,降低噪音,减少停机维修时间,提高适应能力,消除公害,纵观未来,单斗液压挖掘机有以下的趋势:(1)向大型化发展的同时向微型化发展。
(2)更为普遍地采用节能技术。
(3)不断提高可靠性和使用寿命。
(4)工作装置结构不断改进,工作范围不断扩大。
(5)由内燃机驱动向电力驱动发展。
(6)液压系统不断改进,液压元件不断更新。
(7)应用微电子、气、液等机电一体化综合技术。
(8)增大铲斗容量,加大功率,提高生产效率。
(9)人机工程学在设计中的充分利用。
1.3 课题研究方法本文作者对三一重工生产的SANY200C进行现场测绘,取得了工作装置的大体数据资料。
再结合同济大学出版的《单斗液压挖掘机》,利用旋转矢量法和力学知识分别对单斗液压挖掘机的工作装置进行运动学分析和力学计算。
根据运动学分析和力学计算的结果得到工作装置的基本尺寸和结构尺寸。
然后用CAD软件进行二维和三维图的绘制。
1.4 论文构成及研究内容本论文主要对由动臂、斗杆、铲斗、销轴、连杆机构组成挖掘机工作装置进行设计。
具体内容包括以下五部分:(1) 挖机工作装置的总体设计。
(2) 挖掘机的工作装置详细的机构运动学分析。
(3) 工作装置各部分的基本尺寸的计算和验证。
(4) 工作装置主要部件的结构设计。
(5) 销轴的设计及螺栓等标准件进行选型。
2总体方案设计2.1 工作装置构成1-斗杆油缸;2- 动臂; 3-油管; 4-动臂油缸; 5-铲斗; 6-斗齿; 7-侧板;8-连杆; 9-曲柄: 10-铲斗油缸; 11-斗杆.图2-1 工作装置组成图图2-1为液压挖掘机工作装置基本组成及传动示意图,如图所示反铲工作装置由铲斗5、连杆9、斗杆11、动臂2、相应的三组液压缸1, 4,10等组成。
动臂下铰点铰接在转台上,通过动臂缸的伸缩,使动臂连同整个工作装置绕动臂下铰点转动。
依靠斗杆缸使斗杆绕动臂的上铰点转动,而铲斗铰接于斗杆前端,通过铲斗缸和连杆则使铲斗绕斗杆前铰点转动。
挖掘作业时,接通回转马达、转动转台,使工作装置转到挖掘位置,同时操纵动臂缸小腔进油使液压缸回缩,动臂下降至铲斗触地后再操纵斗杆缸或铲斗缸,液压缸大腔进油而伸长,使铲斗进行挖掘和装载工作。
铲斗装满后,铲斗缸和斗杆缸停动并操纵动臂缸大腔进油,使动臂抬起,随即接通回转马达,使工作装置转到卸载位置,再操纵铲斗缸或斗杆缸回缩,使铲斗翻转进行卸土。
卸完后,工作装置再转至挖掘位置进行第二次挖掘循环[2]。
在实际挖掘作业中,由于土质情况、挖掘面条件以及挖掘机液压系统的不同,反铲装置三种液压缸在挖掘循环中的动作配合可以是多样的、随机的。
上述过程仅为一般的理想过程。
挖掘机工作装置的大臂与斗杆是变截面的箱梁结构,铲斗是由厚度很薄的钢板焊接而成。
各油缸可看作是只承受拉压载荷的杆。
根据以上特征,可以对工作装置进行适当简化处理[3]。
则可知单斗液压挖掘机的工作装置可以看成是由动臂、斗杆、铲斗、动臂油缸、斗杆油缸、铲斗油缸及连杆机构组成的具有三自由度的六杆机构,处理的具体简图如2-2所示。
进一步简化得图如2-3所示。
图2-2 工作装置结构简图1-铲斗;2-连杆;3-斗杆;4-动臂;5-铲斗油缸;6-斗杆油缸;7、动臂油缸图2-3 工作装置结构简化图挖掘机的工作装置经上面的简化后实质是一组平面连杆机构,自由度是3,即工作装置的几何位置由动臂油缸长度L1、斗杆油缸长度L2、铲斗油缸长度L3决定,当L1、L2、L3为某一确定的值时,工作装置的位置也就能够确定[2]。
2.2 动臂及斗杆的结构形式动臂采用整体式弯动臂,这种结构形式在中型挖掘机中应用较为广泛。
其结构简单、价廉,刚度相同时结构重量较组合式动臂轻[3],且有利于得到较大的挖掘深度。
斗杆也有整体式和组合式两种,大多数挖掘机采用整体式斗杆。
在本设计中由于不需要调节斗杆的长度,故也采用整体式斗杆。
2.3 动臂油缸与铲斗油缸的布置动臂油缸装在动臂的前下方,动臂的下支承点(即动臂与转台的铰点)设在转台回转中心之前并稍高于转台平面[3],这样的布置有利于反铲的挖掘深度。
油缸活塞杆端部与动臂的铰点设在动臂箱体的中间,这样虽然削弱了动臂的结构强度,但不影响动臂的下降幅度。
并且布置中,动臂油缸在动臂的两侧各装一只,这样的双动臂在结构上起到加强筋的作用,以弥补前面的不足。
具体结构如图2-4所示。
1-动臂; 2=动臂油缸图2-4 动臂油缸铰接示意图2. 4 铲斗与铲斗油缸的连接方式本方案中采用六连杆的布置方式,相比四连杆布置方式而言在相同的铲斗油缸行程下能得到较大的铲斗转角,改善了机构的传动特性。
该布置中1杆与2杆的铰接位置虽然使铲斗的转角减少但保证能得到足够大的铲斗平均挖掘力。
如图2-5所示。
1-斗杆; 2-连杆机构; 3-铲斗 图2-5 铲斗连接布置示意图2.5 铲斗的结构选择铲斗结构形状和参数的合理选择对挖掘机的作业效果影响很大,其应满足以下的要求[1]:(1) 有利于物料的自由流动。
铲斗内壁不宜设置横向凸缘、棱角等。
斗底的纵向剖面形状要适合于各种物料的运动规律。
(2) 要使物料易于卸尽。
(3) 为使装进铲斗的物料不易于卸出,铲斗的宽度与物料的粒径之比应大于4,大于50时,颗粒尺寸不考虑,视物料为均质。
综上考虑,选用中型挖掘机常用的铲斗结构,基本结构如图2-6所示。
32 1图2-6 铲斗斗齿的安装连接采用橡胶卡销式,结构示意图如2-7所示。
1-卡销;2 –橡胶卡销;3 –齿座; 4–斗齿图2-7 卡销式斗齿结构示意图2.6 原始几何参数的确定(1)动臂与斗杆的长度比K1由于所设计的挖机适用性较强,一般不替换工作装置,故取中间比例方案,K1取在=1.8,即l1/l2=1.8。
1.5~2.0之间,初步选取K1(2)铲斗斗容与主参数的选择斗容在任务书中已经给出:q =0.9 m3按经验公式和比拟法初选:l3=1600mm(3)工作装置液压系统主参数的初步选择各工作油缸的缸径选择要考虑到液压系统的工作压力和“三化“要求。
初选动臂油缸内径D1=140mm,活塞杆的直径d1=90mm。
斗杆油缸的内径D2=140mm,活塞杆的直径d2=90mm。
铲斗油缸的内径D3=110mm,活塞杆的直径d3=80mm。
又由经验公式和其它机型的参考初选动臂油缸行程L1=1000mm,斗杆油缸行程L2=1500mm,铲斗油缸行程L3=1300mm。
并按经验公式初选各油缸全伸长度与全缩长度之比:λ1=λ2=λ3=1.6。
参照任务书的要求选择工作装置液压系统的工作压力P=31.4MPa,闭锁压力P g=34.3MPa。
3 工作装置运动学分析3.1 动臂运动分析:min 1L 动臂油缸的最短长度;:max 1L 动臂油缸的伸出的最大长度;A :动臂油缸的下铰点;B :动臂油缸的上铰点;C :动臂的下铰点.图3-1 动臂摆角范围计算简图φ1是L1的函数。