四工位专用机床课程设计说明书(超详细)
- 格式:doc
- 大小:578.00 KB
- 文档页数:18
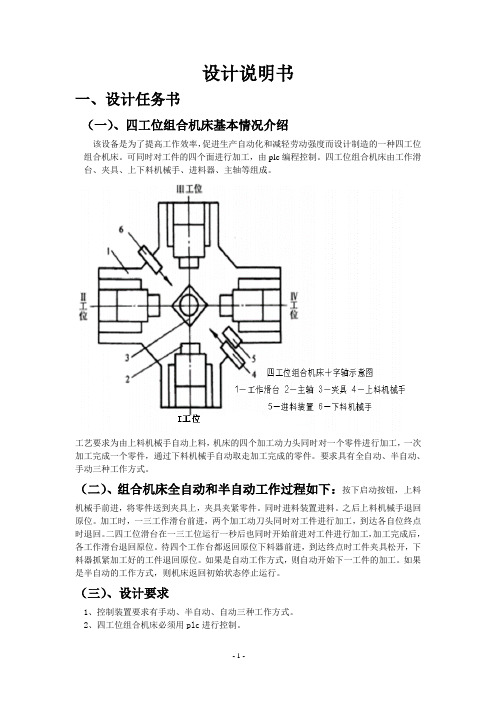
设计说明书一、设计任务书(一)、四工位组合机床基本情况介绍该设备是为了提高工作效率,促进生产自动化和减轻劳动强度而设计制造的一种四工位组合机床。
可同时对工件的四个面进行加工,由plc编程控制。
四工位组合机床由工作滑台、夹具、上下料机械手、进料器、主轴等组成。
工艺要求为由上料机械手自动上料,机床的四个加工动力头同时对一个零件进行加工,一次加工完成一个零件,通过下料机械手自动取走加工完成的零件。
要求具有全自动、半自动、手动三种工作方式。
(二)、组合机床全自动和半自动工作过程如下:按下启动按钮,上料机械手前进,将零件送到夹具上,夹具夹紧零件。
同时进料装置进料。
之后上料机械手退回原位。
加工时,一三工作滑台前进,两个加工动刀头同时对工件进行加工,到达各自位终点时退回。
二四工位滑台在一三工位运行一秒后也同时开始前进对工件进行加工,加工完成后,各工作滑台退回原位。
待四个工作台都返回原位下料器前进,到达终点时工件夹具松开,下料器抓紧加工好的工件退回原位。
如果是自动工作方式,则自动开始下一工件的加工。
如果是半自动的工作方式,则机床返回初始状态停止运行。
(三)、设计要求1、控制装置要求有手动、半自动、自动三种工作方式。
2、四工位组合机床必须用plc进行控制。
3、有急停、预停两种停止按钮。
4、滑台的进退,夹具的夹紧、松开以及上下料之间都进行互锁保护。
5、绘制电器原理图、选择电器元件、编制元件目录表。
6、绘制总接线图、控制面板布置图与接线图等工艺图样。
7、编制设计使用说明书。
8、设计用户程序,编写设计报告。
二、设计过程(一)、总体方案选择说明1、四工位组合机床四个主轴转动分别用M1~M4电机作为动力源。
2、四个滑台的进退以及夹具、上下料机械手和进料装置有一个液压系统进行控制,只需选用一个液压泵。
而冷却装置单独用一个液压系统进行控制。
3、四个滑台上都设有行程开关,来保证主轴与工件的相对位置的准确性。
4、M1~M4为自动控制连续运转,采用热继电器实现过载保护5、滑台的进退,夹具的夹紧、松开以及上下料之间都进行互锁保护。
四工位组合机床控制系统的设计【摘要】作为现代机械设备实现传动与控制的重要技术手段,液压技术在国民经济各领域得到了广泛的应用。
与其他传动控制技术相比,液压技术具有能量密度高﹑配置灵活方便﹑调速范围大﹑工作平稳且快速性好﹑易于控制并过载保护﹑易于实现自动化和机电液一体化整合﹑系统设计制造和使用维护方便等多种显著的技术优势,因而使其成为现代机械工程的基本技术构成和现代控制工程的基本技术要素。
液压压力机是压缩成型和压注成型的主要设备,适用于可塑性材料的压制工艺。
如冲压、弯曲、翻边、薄板拉伸等。
也可以从事校正、压装、砂轮成型、冷挤金属零件成型、塑料制品及粉末制品的压制成型。
四工位组合机床由四个工作滑台,各带一个加工动力头,组成四个加工工位。
除了四个加工工位外,还有夹具,上下料机械手和进料器四个辅助装置以及冷却和液压系统共四个部分。
机床的四个加工动力头同时对一个零件的四个端面进行加工。
一次加工完成一个零件。
要求具有全自动、半自动、手动三种工作方式,总体的控制流程,当按下启动按扭后,上料机械手向前,将零件送到夹具上,夹具加紧零件,同时进料装置进料,之后上料机械手退回原位,进料装置放料,然后四个工作滑台向前,四个加工动力头同时加工(洗端面),加工完成后。
由四工位加所实现的是加工按次序加工。
本次加工按次序分为在一工位装卸、二工位打中心孔、三工位钻孔、四工位加工螺纹。
本文运用大学所学的知识,提出了四工位组合机床的结构组成、工作原理以及液压回转工作台液压系统、动力头液压系统的组成,构建了四工位组合机床机械、液压控制系统总的指导思想,从而得出了该四工位组合机床的优点是高效,经济,并且运行平稳的结论。
关键词:液压技术四工位组合机床液压系统结论The design of the control system of the four working position combination machine tool 【ABSTRACT】As one of the modern machinery equipment ransmission and control important technical means, hydraulic technology in the field of national economy has been widely used. Compared with other transmission control technology, hydraulic technology has high energy density, flexible and convenient configuration, large speed range, rapid and smooth work ability, easy to be controlled and overload protection, easily rintegration ,system integration design ,easy maintenance in manufacturing operation and other significant advantages n technology which make it become the basic technology of modern mechanical engineering.it can be engaged in the adjustment, the mounting indentation, the grinding wheel formation, the swaging metal parts formation, the plastic products and the powder products suppressed formation.including the choice of motor, a crank connecting rod transmission design, shaft design, bearing design, selection of the key and the design of the frame, trying to through the design, so that the transport mechanism of walnut is simple, and can improve the efficiency, and also can reduce the energy consumption.Vibrating conveyer is the eccentric wheel drives a connecting rod to generate centrifugal force, the materials can be separated. This paper is divided into several parts to illustrate the design process, so I did about graduation design walnut vibration conveyi ng equipment.Graduation project this time is a tube axial compressive loading machine. This paper introduces the theoretical calculation to design sleeve pressing machine structure, working principle and main parts of the strength check and the advantages of the sleeve, pressing machine is efficient.Keywords:eneryoperationintergrtindesign modern advantages目录1 绪论 (1)1.1 课题的意义、背景及现状 (1)1.2 组合机床概述 (2)1.3 液压系统的基本组成 (3)2 组合机床液压系统的工况分析 (7)2.1 负载分析 (8)2.2 运动分析 (9)3 液压系统主要参数的确定 (10)4 确定液压系统方案和拟定液压系统原理图 (13)4.1 确定液压系统方案 (14)4.2 确定基本回路 (15)4.3将液压回路综合成液压系统 (16)5 选择液压元件 (17)5.1 液压泵 (18)5.2 阀类元件及辅助元件 (19)5.3 油管 (19)5.4 油箱 (20)5.5 密封件的选择 (21)6 液压缸在实际中的应用情况分析 (22)结束语 (23)谢辞 (24)参考文献 (25)1 绪论由于液压工程的知识总量已经远远超越个人掌握所有,一些专业知识是必不可少的。

四机位专用机床课程设计一、课程目标知识目标:1. 让学生掌握四机位专用机床的基本结构、工作原理及功能特点,与课本知识紧密结合。
2. 使学生了解四机位专用机床在制造业中的应用场景和重要性,提高对机床行业的认识。
3. 引导学生掌握四机位专用机床的编程与操作方法,培养实际操作能力。
技能目标:1. 培养学生运用所学知识分析、解决四机位专用机床在实际生产中遇到的问题的能力。
2. 提高学生的团队协作和沟通能力,学会在小组讨论中分享观点、倾听他人意见。
3. 培养学生动手实践和创新能力,能够针对四机位专用机床进行简单的故障排查和维护。
情感态度价值观目标:1. 培养学生对机械制造领域的兴趣,激发学习热情,提高学习积极性。
2. 引导学生树立正确的职业观念,认识到机械制造行业的重要性,培养敬业精神。
3. 培养学生的安全意识,加强对四机位专用机床操作过程中安全防护的认识。
课程性质:本课程为专业技能课,结合课本知识,注重实践操作,提高学生的专业素养。
学生特点:学生处于专业技能学习阶段,对机床操作有一定的基础,但实践经验不足,需要加强实际操作能力的培养。
教学要求:教师需结合课本内容,设计丰富的实践活动,引导学生积极参与,确保课程目标的实现。
同时,注重培养学生的团队协作、沟通能力和安全意识,为将来的职业生涯打下坚实基础。
通过本课程的学习,使学生能够达到预期学习成果,为后续课程和实际工作奠定基础。
二、教学内容1. 四机位专用机床基本结构:讲解机床的床身、立柱、横梁、滑座、刀架等主要部件的结构特点,结合教材第二章内容。
2. 工作原理:介绍四机位专用机床的工作原理,包括电机、传动系统、数控系统等,与教材第三章内容相结合。
3. 功能特点:分析四机位专用机床在加工精度、效率、自动化程度等方面的优势,参照教材第四章内容。
4. 应用场景:展示四机位专用机床在航空、汽车、模具等领域的应用案例,结合教材第五章内容。
5. 编程与操作:教授四机位专用机床的编程方法和操作技巧,包括手动编程、自动编程及操作界面,依据教材第六章内容。
目录一,功能原理和设计要求 (1)1)工作原理2)设计要求二,功能分解和运动分析1)功能分解2)运动分析三,拟定运动循环图四,执行机构选型五,传动机构选型六,机械运动方案的选择七,机械运动方案简图八,尺寸计算1)机器整体轮廓打消的确定2)电机的选型3)减速器的传动设计4)槽轮的尺寸计算5)直动推杆圆柱凸轮的尺寸设计九,机械运动方案的评价和改进一,功能原理和设计要求1.工作原理四工位专用机床是在四个工位上分别完成相应的装卸工件,钻孔,扩孔,绞孔工作,它执行动作有两个:一时装有四工位工件的回转台转动;二十装有由专用电动机丹东的三把专用刀具的主轴箱的刀具的转动和移动。
2.设计要求1)顶端离开工件表面65mm,快速移动送进了60mm后,再匀速送进60mm(包括5mm刀具切入量,45mm工件孔深,10mm刀具切出量),然后快速返回,回程和工作行程的平均速度只比K=2.2)刀具匀速进给速度为2mm/s,工件装,卸时间不超过10s.3)生产率为每小时约75件。
4)执行机构系统应装入机体内。
二.功能分解和运动分析1.功能分解通过对工作原理和设计要求的分析可知,四工位专用机床的回转台与主轴箱的功能分为一下几个动作:1)安装工件的回转台间歇转动。
2)安装刀具的主轴箱要完成快进,匀速进给,快速返回几个动作。
3)主轴箱上的刀具转动切削工件。
2..运动分析设选定电动机型号为Y160M2—8,其转速n=720r/min,P=5.5km,则四工位专用机床的一个周期内的详细运动情况为:1)电动机作为驱动,通过减速装和其他齿轮系将符合要求的转速传递给回转台上的间歇机构,使其做间歇转动,同时也将符合要求的转速传递给主轴箱下的刀具移动机构,使其做符合要求的动作。
2)当间歇机构开始第一次循环时,安装,并加紧工件,间歇机构从0°转至90°3)间歇机构从从90°转至180°,主轴完成一次工作循环(快进,刀具匀速进给,快退)。

四工位专业机床课程设计一、课程目标知识目标:1. 学生能够掌握四工位专业机床的基本结构、功能及操作流程。
2. 学生能够理解机床坐标系、工件坐标系及编程中的坐标变换原理。
3. 学生能够运用所学知识,对中等复杂程度的零件进行加工工艺分析及编程。
技能目标:1. 学生能够熟练操作四工位专业机床,完成铣削、钻削等基本加工任务。
2. 学生能够运用CAD/CAM软件进行零件造型、加工路径规划及生成加工程序。
3. 学生能够根据实际加工要求,合理选择切削参数,提高加工效率及质量。
情感态度价值观目标:1. 培养学生对机械加工行业的兴趣和热爱,激发他们投身制造业的积极性。
2. 培养学生严谨、细致的工作态度,提高他们在实际工作中解决问题的能力。
3. 培养学生的团队协作意识,使他们能够在实际工作中与同事密切配合,共同完成任务。
本课程针对中职或高职学生,结合四工位专业机床的实际情况,注重理论联系实际,提高学生的实际操作能力和工艺分析能力。
课程目标旨在帮助学生掌握机床操作、加工工艺及编程等方面的知识,为将来从事机械加工行业工作打下坚实基础。
同时,注重培养学生的情感态度和价值观,使他们成为具有较高职业素养的技能型人才。
1. 四工位专业机床结构及功能:介绍机床的组成、各部件的功能及作用,以教材第3章为基础,重点讲解主轴、进给系统、冷却系统等关键部分。
2. 坐标系及坐标变换:以教材第4章为参考,讲解机床坐标系、工件坐标系的建立及编程中的坐标变换方法。
3. 零件加工工艺分析:结合教材第5章,分析铣削、钻削等加工工艺,教授学生如何根据零件图纸制定合理的加工方案。
4. CAD/CAM软件应用:以教材第6章为例,教授学生使用CAD/CAM软件进行零件造型、加工路径规划及生成加工程序。
5. 切削参数的选择:参考教材第7章,讲解切削速度、进给量、切削深度等参数对加工效率和质量的影响,教授学生如何合理选择切削参数。
6. 实践操作:安排教材第8章内容,指导学生进行四工位专业机床的操作,完成铣削、钻削等基本加工任务。

工位专用机床设计说明书HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】附件:目录1.设计任务工作原理及工艺动作过程四工位机床是在四个工位上分别完成相应的装卸工件、钻孔、扩孔、铰孔工作。
它的执行动作有两个:一是装有四工位工件的回转运动;二是装有专用电动机带动三把专用的主轴箱的刀具转动和水平往复移动。
原始数据及设计要求⑴刀具顶端离开工作表面65mm,快速移动送进60mm后,再匀速送进60mm(包括5mm 刀具切入量,45mm工件孔深,10mm刀具切出量,如图①所示),然后快速返回。
回程和进程的平均速度之比为K=2。
⑵刀具的匀速给进速度为2mm/s工作装卸时间不超过10s。
⑶机床生产效率每小时约60件。
⑷执行机构及传动机构能装入机体内。
⑸传动系统电机为交流异步电动机,功率,转速960r/min。
图①孔的典型加工工艺及刀具孔的加工包括从实体材料上加工孔和对已有孔进行加工两大类。
麻花钻是在实体材料上加工孔的常用刀具,加工精度较低。
扩孔钻和铰刀是用于对已有孔进行加工的刀具。
扩孔钻的外形和麻花钻相类似,只是加工余量小,刀齿数目比麻花钻多,加工后孔的质量较好,一般能达IT10—11级精度。
铰刀是提高被加工孔质量的半精加工或精加工刀具,切削时加工余量更小,刀齿数目更多,加工后孔的精度最高可达IT8。
孔加工刀具示意图2.功能分解与运动分析功能分解通过对设计任务的了解,可以看出,四工位专用机床的加工部分可以分为如下几个工艺动作。
(4)安装工作台的间歇转转动。
(5)安装刀具的主轴箱应按要求进行静止,快进,快给,快退的工艺动作。
(6)刀具转动。
画出四工位专用机床的动作要求图。
四工位专用机床工作原理及外形尺寸专用机床旋转工作台有四个工作位置Ⅰ、Ⅱ、Ⅲ、Ⅳ(如图2所示),分别对应工件的装卸、钻孔、扩孔和铰孔。
主轴箱上装有三把刀具,对应于工位Ⅱ的位置装钻头,Ⅲ的位置装扩孔钻,Ⅳ的位置装铰刀。
设计题目:四工位专用机床机械原理课程设计指导书1.孔的典型加工工艺及刀具孔的加工包括从实体材料上加工孔和对已有孔进行加工两大类。
麻花钻是在实体材料上加工孔的常用刀具,加工精度较低。
扩孔钻和铰刀是用于对已有孔进行加工的刀具。
扩孔钻的外形和麻花钻相类似,只是加工余量小,刀齿数目比麻花钻多,加工后孔的质量较好,一般能达IT10—11级精度。
铰刀是提高被加工孔质量的半精加工或精加工刀具,切削时加工余量更小,刀齿数目更多,加工后孔的精度最高可达IT8。
图1 孔加工刀具示意图2.四工位专用机床工作原理及外形尺寸专用机床旋转工作台有四个工作位置Ⅰ、Ⅱ、Ⅲ、Ⅳ(如图2所示),分别对应工件的装卸、钻孔、扩孔和铰孔。
主轴箱上装有三把刀具,对应于工位Ⅱ的位置装钻头,Ⅲ的位置装扩孔钻,Ⅳ的位置装铰刀。
刀具由专用电动机驱动绕其自身轴线转动。
主轴箱每向左移动送进一次,在四个工位上分别完成相应的装卸工件、钻孔、扩孔和铰孔工作。
当主轴箱右移(退回)到刀具离开工件后,工作台回转90º,然后主轴箱再次左移,这时,对其中每一个工件来说,它进入了下一个工位的加工,依次循环四次,一个工件就完成装、钻、扩、铰、卸等工序。
由于主轴箱往复一次,在四个工位上同时进行工作,所以每次就有一个工件完成上述全部工序。
机床外形可参考图2,外形总体尺寸可用于检查所设计机构能否装入机体内部。
图2 专用机床外形及尺寸3.设计步骤1)执行机构的选型根据专用机床的功能要求,回转工作台做单向间歇运动,主轴箱做往复直线运动。
实现工作台单向间歇运动的机构有棘轮机构、槽轮机构、凸轮机构、不完全齿轮机构等,实现主轴箱往复直线运动的机构有连杆机构和凸轮机构等。
上述机构的结构、工作原理及特点见参考材料1、2。
机构选型应遵循以下原则。
表1 选用执行机构的原则与方法2)机械运动方案的评价对上述两执行机构,做其形态学矩阵,可得到为数众多的方案。
机械运动方案的拟定,最终要求通过分析比较提供最佳方案。
四工位加工机床课程设计一、课程目标知识目标:1. 学生能够理解并掌握四工位加工机床的基本结构及其工作原理;2. 学生能够了解并描述四工位加工机床的常见加工工艺流程;3. 学生能够掌握四工位加工机床的安全操作规程和相关术语。
技能目标:1. 学生能够独立操作四工位加工机床完成指定零件的加工;2. 学生能够运用CAD/CAM软件进行四工位加工机床的编程;3. 学生能够解决四工位加工机床操作过程中遇到的一般性问题。
情感态度价值观目标:1. 培养学生热爱机械加工专业,增强其对制造业的认识和兴趣;2. 培养学生具有良好的团队合作精神,遵守加工机床操作规程,养成良好的安全生产意识;3. 培养学生勇于创新,善于思考,具备解决实际问题的自信心。
课程性质:本课程为机械加工专业课程,以实践操作为主,理论联系实际。
学生特点:学生具备一定的机械加工基础知识,动手能力较强,对新鲜事物充满好奇心。
教学要求:教师需结合学生特点,采用讲解与实践相结合的教学方法,充分调动学生的学习积极性,注重培养其操作技能和解决问题的能力。
在教学过程中,关注学生的个体差异,鼓励学生相互交流与合作,确保课程目标的实现。
通过本课程的学习,使学生具备四工位加工机床操作所需的基本知识和技能,为未来从事相关领域工作打下坚实基础。
二、教学内容1. 四工位加工机床概述:介绍四工位加工机床的发展历程、分类及其在制造业中的应用。
教材章节:《机械加工机床》第二章第一节。
2. 四工位加工机床的结构与原理:详细讲解四工位加工机床的各个组成部分及其工作原理。
教材章节:《机械加工机床》第二章第二节。
3. 四工位加工机床的加工工艺:分析四工位加工机床的加工工艺流程、参数设置及优化。
教材章节:《机械加工机床》第二章第三节。
4. 四工位加工机床操作与编程:讲解四工位加工机床的安全操作规程、编程方法及注意事项。
教材章节:《机械加工机床》第二章第四节。
5. 四工位加工机床维护与故障排除:介绍四工位加工机床的日常维护保养方法及常见故障的排除方法。
目录1、功能原理和设计要求 (1)1.1、工作原理 (1)1.2、设计要求 (1)1.3、设计方案提示 (2)2、功能分解和运动分析 (2)2.1、运动分解 (2)2.2、运动分析 (2)3、执行机构选型 (3)4、传动机构选型 (3)5、机械运动方案的选择 (4)6、画出机械运动方案简图 (5)7、根据运动分析和协调要求拟定运动循环图 (7)8、机械运动方案的比较和优选 (7)9、尺寸的计算 (9)9.1、运动循环图各区间时间的计算 (9)9.2、减速器的传动计算 (9)9.3、槽轮的尺寸计算 (10)9.4、直动推杆圆柱凸轮的尺寸设计 (12)10、参考文献: (12)四工位专用机床设计说明书1、功能原理和设计要求1.1、工作原理四工位专用机床是在四个工位上分别完成相应的装卸工件、钻孔、扩孔、铰孔工作。
:一是装有四工位工件的回转转动;二是装有专用电动机带动三把专用的主轴箱的刀具转动和移动。
1.2、设计要求专用机床外形及其尺寸如图4所示。
工作台有Ⅰ、Ⅱ、Ⅲ、Ⅳ四个工作位置,工位I是装卸工件,工位Ⅱ是钻孔,工位Ⅲ是扩孔,工位Ⅳ是铰孔。
主轴箱上装有三把刀具,对应于工位Ⅱ、位置装钻头,Ⅲ位置装扩孔钻,Ⅳ位置装铰刀。
刀具由专用电动机带动绕其自身的轴线转动。
主轴箱每向左栘动送进一次,分别在四个工位上完成对应的装卸图4专用机床工件、钻孔、扩孔和铰孔工作。
当主轴箱右移快速退回到刀具离开工件后,工作台回转90度,然后主轴箱再次左移。
这时对其中每一个工件来说,它进入了下一个工位的加工。
依次循环4次,一个工件完成装、钻、扩、铰、卸等工序。
由于主轴往复一次,在四个工位上同时进行工作,所以每次就有一个工件完成上述全部工序1)刀具顶端离开工作表面65mm,快速移动送进60mm后,再匀速送进60mm(包括5mm刀具切入量、45mm工件孔深、10mm刀具切出量,如右图所示),然后快速返回。
回程和进程的平均速度之比K=2。
2)刀具匀速进给速度为2mm/s,工件装卸时间不超过10s。
设计任务书设计任务:1 按工艺动作过程拟定机构运动循环图2 进行回转台间歇机构,主轴箱道具移动机构的选型,并进行机械运动方案评价和选择3 按选定的电动机和执行机构的运动参数进行机械传动方案的拟定4 对传动机构和执行机构进行运动尺寸设计5 在2号图纸上画出最终方案的机构运动简图6 编写设计计算说明书设计要求:1 从刀具顶端离开工件表面65mm位置,快速移动送进了60mm后,在匀速送进60mm (5mm刀具切入量,45mm工件孔深,10mm刀具切出量),然后快速返回。
回程和工作行程的速比系数K=2。
2 生产率约每小时60件。
3 刀具匀速进给速度2mm/s,工件装、卸时间不超过10s。
4 执行机构能装入机体内。
机械运动方案设计根据专用机床的工作过程和规律可得其运动循环图如下:机构运动循环图该专用机床要求三个动作的协调运行,即刀架进给、卡盘旋转和卡盘的定位。
其工作过程如下:要确保在刀具与工件接触时卡盘固定不动,刀具退出工件到下次接触工件前完成卡盘旋转动作。
几个动作必须协调一致,并按照一定规律运动。
机械总体结构设计一、原动机构:原动机选择Y132S-4异步电动机,电动机额定功率P=5.5KW,满载转速n=1440r/min 。
二、传动机构:传动系统的总传动比为i=n/n 6,其中n 6为圆柱凸轮所在轴的转速,即总传动比为1440/1。
采用涡轮蜗杆减速机构(或外啮合行星减速轮系)减速。
三、执行部分总体部局:执行机构主要有旋转工件卡盘和带钻头的移动刀架两部分,两个运动在工作过程中要保持相当精度的协调。
因此,在执行机构的设计过程中分为,进刀机构设计、卡盘旋转机构和减速机构设计。
而进刀机构设计归结到底主要是圆柱凸轮廓线的设计,卡盘的设计主要是间歇机构的选择。
在执行过程中由于要满足相应的运动速度,因此首先应该对于原动机的输出进行减速。
下面先讨论减速机构传动比的确定:由于从刀具顶端离开工件表面65mm 位置,快速移动送进了60mm 后,在匀速送进60mm (5mm 刀具切入量,45mm 工件孔深,10mm刀具切出量),然后快速返回。
设计任务书设计任务:1 按工艺动作过程拟定机构运动循环图2 进行回转台间歇机构,主轴箱道具移动机构的选型,并进行机械运动方案评价和选择3 按选定的电动机和执行机构的运动参数进行机械传动方案的拟定4 对传动机构和执行机构进行运动尺寸设计5 在2号图纸上画出最终方案的机构运动简图6 编写设计计算说明书设计要求:1 从刀具顶端离开工件表面65mm位置,快速移动送进了60mm后,在匀速送进60mm(5mm刀具切入量,45mm工件孔深,10mm刀具切出量),然后快速返回。
回程和工作行程的速比系数K=2。
2 生产率约每小时60件。
3 刀具匀速进给速度2mm/s,工件装、卸时间不超过10s。
4 执行机构能装入机体内。
机械运动方案设计根据专用机床的工作过程和规律可得其运动循环图如下:机构运动循环图该专用机床要求三个动作的协调运行,即刀架进给、卡盘旋转和卡盘的定位。
其工作过程如下:机床工作运动模型要确保在刀具和工件接触时卡盘固定不动,刀具退出工件到下次接触工件前完成卡盘旋转动作。
几个动作必须协调一致,并按照一定规律运动。
机械总体结构设计一、原动机构:原动机选择Y132S-4异步电动机,电动机额定功率P=5.5KW,满载转速n=1440r/min。
二、传动机构:传动系统的总传动比为i=n/n6,其中n6为圆柱凸轮所在轴的转速,即总传动比为1440/1。
采用涡轮蜗杆减速机构(或外啮合行星减速轮系)减速。
三、执行部分总体部局:执行机构主要有旋转工件卡盘和带钻头的移动刀架两部分,两个运动在工作过程中要保持相当精度的协调。
因此,在执行机构的设计过程中分为,进刀机构设计、卡盘旋转机构和减速机构设计。
而进刀机构设计归结到底主要是圆柱凸轮廓线的设计,卡盘的设计主要是间歇机构的选择。
在执行过程中由于要满足相应的运动速度,因此首先应该对于原动机的输出进行减速。
下面先讨论减速机构传动比的确定:由于从刀具顶端离开工件表面65mm位置,快速移动送进了60mm后,在匀速送进60mm(5mm 刀具切入量,45mm工件孔深,10mm刀具切出量),然后快速返回。
要求效率是60件/小时,刀架一个来回(生产1个工件)的时间应该是1分钟。
根据这个运动规律,可以计算出电机和工作凸轮之间的传动比为1440/1。
两种方案的传动比计算,参考主要零部件设计计算。
下面讨论执行机构的运动协调问题:有运动循环图可知,装上工件之后,进刀机构完成快进、加工、退刀工作,退后卡盘必须旋转到下一个工作位置,且在加工和退刀的前半个过程中卡盘必须固定不动,由于卡盘的工作位置为四个,还要满足间歇和固定两个工作,于是选择单销四槽轮机构(或棘轮机构、不完全齿轮机构和定位销协调)解决协调问题,具体实现步骤参考“回转工作台设计”。
由于进刀机构的运动比较复杂,因此要满足工作的几个状态,用凸轮廓线设计的办法比较容易满足。
廓线的设计参考主要零部件设计计算。
机械传动系统设计1、涡轮蜗杆减速器:采用如图机构,通过涡轮蜗杆加上一个定轴轮系实现了:2、外啮合行星齿轮减速器:采用如图采用渐开线直齿圆柱齿轮啮合传动,实现传动比:3、定轴轮系减速器:涡轮蜗杆减速机构采用如图采用渐开线直齿圆柱齿轮啮合传动,实现:定轴轮系减速机构主要零部件的设计计算一、减速机构设计:方案一:涡轮蜗杆减速机构结构图如下:1、蜗杆:m=5mm d=40mm (机械原理,p346,表10-7)2、涡轮:(d=mz) m=5mm z 2=20 d 2=100mm z 4=36 d 4=180mm3、齿轮:此齿轮机构的中心距a=135mm,模数m=5mm ,采用标准直齿圆柱齿轮传动,z 5=18,z 6=36,ha*=1.0,(d=mz,d 5=90mm,d 6=180mm)4、传动比计算: 1440183613612056341216=⨯⨯=∙∙=i i i i 方案二:外啮合行星齿轮减速器: 结构图如下:涡轮蜗杆减速机构12345678图示z 1=10, z 2=36, z 3=18, z 4=21, z 5=20, z 6=17, z 7=14, z 8=40 传动比计算:i 18=i 12i H6i 78 其中i 12= -z 2 /z 1=-36/10i H6=1/i 6H182017211113564636⨯⨯-=-=-=z z z z i i HH所以 336017211820182011636=⨯-⨯⨯=-=HH i i又i 78=-z 8/z 7=-40/12 所以14401240336010367861218=-∙∙-=∙∙=i i i i H 方案三:定轴轮系减速器图示z 1=17, z 2=51, z 3=12, z 4=60, z 5=12, z 6=72, z 7=13, z 8=52,z 9=12,外啮合行星轮系减速机构z 10=48,z 11=48 传动比计算:i 111=109753111108642z z z z z z z z z z z z ⨯⨯⨯⨯⨯⨯⨯⨯⨯⨯=1440二、圆柱凸轮进刀机构设计:1、运动规律:刀具运动规律:刀具快速进给60mm ,匀速进给60mm (刀具切入量5mm,工件孔深45mm,刀具余量10mm ),快速退刀。
因为刀具匀速进给的速度为2mm/s ,由此可得匀速进给的时间为30s ,设快速进给的时间为x ,快速退刀的时间为y ,又因为其回程和工作的速比系数K=2,所以可得下列方程:30+x=2y (1) 30+x+y=60 (2)定轴轮系减速机构(1)(2)两个方程联立可以得出,x=10s , y=20s 因此可以得出如下图所示的刀架运动规律图:60° 240°2、凸轮廓线设计:进刀机构的运动有凸轮的廓线来实现,进刀的方向为安装凸轮的轴的轴线方向,根据运动的特性,凸轮选择圆柱凸轮,按照运动规律设计其廓线如下:三、 回转工作台机构设计:回转工作台的运动规律:四个工作位置,每个工作位置之间相差90°,在工作过程中,旋转90°,停止定位,进刀加工,快速退刀后,旋转90°,进行下一个循环。
在加工和退刀的前半段(即刀具和工件有接触)时,必须将工作台固定,由于卡盘的工作位置为四个,还要满足间歇和固定两个工作,1、采用单销四槽槽轮机构。
其结构图如下图所示:刀架运动规律图进刀圆柱凸轮廓线槽轮机构中,当圆销没有进入槽轮的径向槽时,由于槽轮的内凹锁止弧被拨盘的外凸锁止弧卡住,故槽轮固定不动;当圆销进入径向槽时,锁止弧的自锁段被松开,槽轮在圆销作用下旋转,实现了间歇运动。
因为卡盘每次旋转90°,所以选择四槽均布槽轮,刚好实现旋转90°的要求。
2、采用棘轮机构,其结构图如下图所示:机构采用曲柄摇杆机构来作为主动件,有运动循坏图中可知:3604.3076036011-+<+k 于是得:K>2.2所以极位夹角大于等于67.5°因此满足停留时间的于转动时间之间的比例关系,要求棘轮每次旋转90°,因此摇杆的摆角也为90°。
3、采用不完全齿轮机构,其结构如下图所示:不完全齿轮机构不完全齿轮的设计也是为了满足间歇运动,不完全齿轮上有1/4上有齿,因此在啮合过程中,有齿的1/4带动完全齿轮旋转90°,之后的270°由于没有齿啮合,完全齿轮不转动,该机构结构简单,在低速(1r/min)的转动中可和忽略齿轮啮合时的冲击影响。
故也能实现运动规律。
四、圆柱凸轮定位销机构设计:由机构运动循环图可以看出,定位销一共有两个工作位置,刀具在和工件接触前必须将主轴固定住,刀具离开工件后到再次接触前(即卡盘旋转时)定位销必须拔出。
由于本机床中采用了槽轮机构,该机构有固定功能,定位销的主要作用是辅助定位,起保险作用!其结构图如下图所示辅助凸轮廓线执行机构和传动部件的机构设计一、方案设计根据该机床包含两个执行机构,即主轴箱移动机构和回转台的回转机构。
主轴箱移动机构的主动件是圆柱凸轮,从动件是刀架,行程中有匀速运动段(称工作段),并具有急回特性。
要满足这些要求,需要将几个基本机构恰当地组合在一起来满足上述要求。
实现上述要求的机构组合方案可以有许多种。
1、减速机构的方案有:⑴、涡轮蜗杆减速机构⑵、外啮合行星轮系减速机构⑶、定轴轮系减速机构2、刀架规律性运动的方案有:⑴、圆柱凸轮实现刀架规律性移动:⑵、盘型凸轮—尺条实现刀架规律性移动3、回转工作台回转机构方案:⑴、单销四槽槽轮机构⑵、棘轮机构⑶、不完全齿轮机构4、定位销方案:采用圆柱凸轮机构实现二、方案比较㈠、减速机构1、涡轮蜗杆减速器方案分析:此方案采用最普通的右旋阿基米德蜗杆。
采用蜗杆传动的主要原因有:⑴、传动平稳,振动、冲击和噪声均较小;⑵、能以单级传动获得较大的传动比,故结构比较紧凑;⑶、机构返行程具有自锁性;本方案通过较为简单的涡轮蜗杆机构实现了:min /1r min /1440r n 主轴电机n的大传动比。
满足了机构要求的性能指标,而且结构紧凑,节约空间。
本方案存在的不足:由于涡轮蜗杆啮合齿间的相对滑动速度较大,使得摩擦损耗较大,因此传动效率较低,易出现发热和温升过高的现象。
磨损也较严重。
解决的办法是可以采用耐磨的材料(如锡青铜)来制造涡轮,但成本较高。
2、外啮合行星齿轮减速器方案分析:该方案采用渐开线直齿圆柱齿轮啮合传动,所选轮系为外啮合行星齿轮系,采用齿轮机构的原因是其在各种机构中的运用比较广泛,且制造过程简单,成本较低,并且具有功率范围大,传动效率高,传动比精确,使用寿命长,工作安全可靠等特点。
方案中齿轮系为复合轮系,实现了:min /1r min /1440r n =主轴电机n的大传动比。
且具有较高的传动效率。
本方案中存在的不足是,齿轮机构结构不够紧凑,占用空间较大。
3、定轴轮系减速器方案分析:该方案采用渐开线直齿圆柱齿轮啮合传动,所选轮系为定轴轮系,采用该机构的原因是运用广泛,制造过程简单,成本较低,并且具有功率范围大,传动效率高,传动比精确,使用寿命长,工作安全可靠等特点。
方案中轮系为定轴轮系,实现了:min /1r min /1440r n =主轴电机n的大传动比。
本方案中存在的不足是,齿轮机构结构不够紧凑,占用空间较大。
㈡、刀架规律性运动机构1、圆柱凸轮实现刀架规律性移动:该方案采用圆柱凸轮机构和连杆机构串联组成,采用凸轮机构,是因为该机构只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,而且机构简单紧凑,但其不足在于凸轮廓线和推杆之间为点,线接触,易磨损。
2、盘型凸轮—尺条实现刀架规律性移动:使用盘行凸轮机构首先需要加圆锥齿轮等机构将轴的传动方向转变,然后设计凸轮的廓线。