机电装备设计(5)
- 格式:ppt
- 大小:2.78 MB
- 文档页数:44



机电一体化毕业设计范文一、引言。
大家好!今天我要给大家讲讲我的机电一体化毕业设计——智能物料搬运机器人。
在现代工业生产中,物料搬运可是个大活儿,又累人又容易出错。
所以呢,我就想设计一个聪明的机器人来干这个活儿。
二、设计目标。
1. 精准定位:它得知道自己在哪儿,要去哪儿,不能像个没头的苍蝇到处乱撞。
2. 安全可靠:在工厂里有很多人和设备,机器人可不能到处乱撞,得稳稳当当、安安全全的。
3. 高效搬运:毕竟是来干活儿的,要是慢吞吞的,那可不行,得快速准确地把物料从一个地方搬到另一个地方。
三、总体设计方案。
# (一)机械结构设计。
1. 底盘。
底盘就像是机器人的脚,我选择了四轮驱动的底盘结构。
四个轮子能够提供更好的稳定性和机动性。
轮子采用了特殊的橡胶材质,有很好的摩擦力,这样机器人在行驶过程中就不容易打滑。
为了实现转向功能,我在底盘上安装了转向机构。
这个转向机构就像汽车的方向盘一样,可以控制机器人的行驶方向。
2. 机械臂。
机械臂是用来抓取和搬运物料的关键部件。
我设计的机械臂有三个关节,可以灵活地伸展和弯曲。
每个关节都由一个电机驱动,通过精确的控制算法,能够实现机械臂在三维空间中的精确定位。
在机械臂的末端,我安装了一个特制的夹具。
这个夹具可以根据不同物料的形状和大小进行调整。
对于方形的物料,可以使用夹板式夹具;对于圆形的物料,可以使用环抱式夹具。
# (二)控制系统设计。
1. 硬件部分。
控制器:我选用了一款功能强大的单片机作为机器人的大脑。
这个单片机可以处理各种传感器传来的信息,并且根据预先编写的程序控制机器人的行动。
传感器:为了让机器人能够感知周围的环境,我安装了多种传感器。
比如说,安装了激光雷达传感器,它就像机器人的眼睛一样,可以扫描周围的环境,构建出环境地图,这样机器人就能知道哪里有障碍物,哪里是安全的通道。
还安装了红外传感器,用于近距离检测障碍物,起到一个辅助的作用。
另外,在机械臂上安装了力传感器,当夹具抓取物料时,力传感器可以检测到抓取的力度,避免用力过大损坏物料或者用力过小抓不住物料。

机电系统设计20220409180257机电系统设计是当今工程领域的一个重要分支,它将机械工程与电子工程相结合,通过精确的控制系统实现机械装置的高效、稳定运行。
本文档将围绕机电系统设计的基本概念、设计流程、关键技术和应用实例展开,旨在为读者提供全面、深入的指导。
一、基本概念机电系统设计涉及到机械、电子、控制等多个学科领域,其核心是利用电子技术对机械装置进行精确控制。
一个典型的机电系统通常包括机械结构、传感器、执行器、控制器和电源等组成部分。
其中,机械结构是系统的主体,负责执行具体的物理任务;传感器用于检测系统的状态和性能;执行器根据控制器的指令对机械结构进行操作;控制器则是整个系统的核心,负责接收传感器信号、处理数据并控制指令;电源则为系统提供所需的能量。
二、设计流程1. 需求分析:明确系统的功能、性能、成本等要求,确定设计目标和约束条件。
2. 方案设计:根据需求分析的结果,提出多种设计方案,并进行比较和选择。
3. 详细设计:对选定的方案进行详细设计,包括机械结构设计、电路设计、控制算法设计等。
4. 模型建立:建立系统的数学模型,以便进行仿真分析和性能评估。
5. 仿真分析:利用仿真软件对系统进行仿真分析,验证设计的合理性和可行性。
6. 系统集成:将各个模块集成在一起,进行调试和测试。
7. 性能优化:根据测试结果对系统进行性能优化,提高系统的稳定性和可靠性。
8. 文档编写:编写设计文档、用户手册等,为系统的使用和维护提供指导。
三、关键技术机电系统设计涉及到许多关键技术,包括:1. 机械设计:根据系统的功能要求,设计合理的机械结构,确保其强度、刚度和精度。
2. 传感器技术:选择合适的传感器,提高系统的检测精度和可靠性。
3. 执行器技术:根据系统的控制要求,选择合适的执行器,确保其响应速度和精度。
4. 控制算法设计:设计合理的控制算法,实现系统的稳定、快速、准确的控制。
5. 仿真技术:利用仿真软件对系统进行仿真分析,提高设计的效率和质量。
2.1 主传动系统设计定义:运用转速图的基本原理,拟定满足转速数列的经济、合理的传动系统方案,确定主要传动件的空间布置。
内容:★选择变速组及其传动副数;★确定各变速组中的传动比;★计算齿轮齿数和皮带轮直径;★设计主要传动件的空间布置、轴向定位及其结构尺寸。
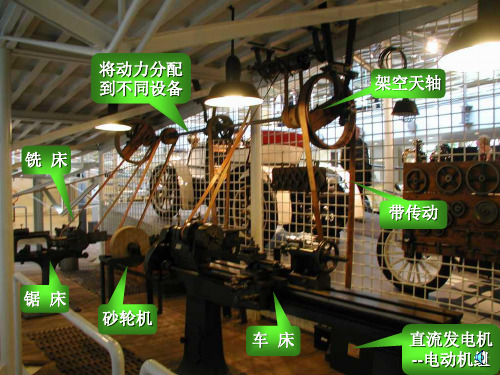
组成:由动力源、变速装置及执行件(如主轴、刀架、工作台),开停、换向和制动机构等部分组成。
动力源给执行件提供动力,变速装置传递动力以及变换运动速度,执行件执行机床所需的运动,完成旋转或直线运动。
2.1.2 分类和布局形式1、分类1)按动力源的类型,分为交流电动机驱动、直流电动机驱动和液压驱动。
○交流电动机驱动:单速交流电动机、调速交流电动机和交流伺服电动机驱动。
调速交流电动机驱动:多速交流电动机和变频调速交流电动机驱动。
2)按变速的连续性,分为有级变速传动和无级变速传动。
○有级变速传动是在一定的变速范围内均匀、离散地分布着有限级数的转速,变速级数不超过20~30级。
有级变速方式:滑移齿轮变速、交换齿轮变速和离合器变速。
优点:除摩擦片式离合器外,传递功率较大,变速范围广,传动比准确,工作可靠,应用于各种普通机床。
缺点:有速度损失,不能在运转中变速。
摩擦片离合器:可在运转过程中变换转速,操纵方式为机械的、电磁的或液压的,便于实现自动化。
但传动比不准确,发热量大。
无级变速传动:可在一定的变速范围内连续变速,以得到最有利的速度,能在运转中变速,便于实现变速自动化。
构成:由机械摩擦无级变速器、液压无级变速器和无级变速电动机实现。
特点:机械摩擦无级变速器结构简单、使用可靠,常用在中小型车床、铣床等的主传动中。
液压无级变速器传动平稳、运动换向冲击小,易于实现直线运动,常用于主运动为直线运动的机床,如磨床、拉床、刨床等机床的主传动中。
※无级变速电动机:直流电动机或交流变频调速电动机,可大大简化机械结构,便于实现自动变速、连续变速和负载下变速,广泛应用在数控机床上。
第1篇一、工程概况本项目为XX工厂机电设备安装工程,主要包括设备基础施工、设备安装、管道安装、电气安装、调试与试运行等环节。
工程地点位于XX市XX区,工程总投资约XXX万元。
工程工期为XX个月,确保按期完成。
二、施工准备1. 技术准备(1)组织施工人员认真学习设计图纸、技术规范和施工方案,确保施工人员掌握施工工艺和操作要领。
(2)对施工人员进行技术交底,明确施工要求和注意事项。
(3)对施工人员进行安全教育和培训,提高施工人员的安全意识。
2. 材料准备(1)根据工程量清单,提前采购各类设备、材料,确保材料质量符合要求。
(2)对采购的设备、材料进行验收,确保其质量、规格、型号等符合设计要求。
3. 人员准备(1)组织施工队伍,明确各工种人员配置,确保施工力量充足。
(2)对施工人员进行技术考核,选拔技术过硬、经验丰富的施工人员担任关键岗位。
4. 施工设备准备(1)提前准备各类施工设备,如吊车、叉车、钻机、电焊机等,确保施工过程中设备需求。
(2)对施工设备进行检查和维护,确保设备运行正常。
三、施工方案1. 设备基础施工(1)按照设计图纸和规范要求,进行设备基础施工。
(2)严格控制基础混凝土的浇筑质量和养护,确保基础强度达到设计要求。
(3)对设备基础进行验收,确保基础平整、坚实、无裂缝。
2. 设备安装(1)根据设备安装工艺要求,进行设备安装。
(2)确保设备安装位置准确、牢固,满足设备运行要求。
(3)对安装的设备进行调试,确保设备运行正常。
3. 管道安装(1)按照设计图纸和规范要求,进行管道安装。
(2)严格控制管道焊接质量和防腐处理,确保管道安全运行。
(3)对安装的管道进行验收,确保管道连接牢固、无泄漏。
4. 电气安装(1)按照设计图纸和规范要求,进行电气安装。
(2)严格控制电气设备安装质量和线路敷设,确保电气系统安全可靠。
(3)对安装的电气设备进行调试,确保电气系统运行正常。
5. 调试与试运行(1)对安装完成的设备进行单机调试,确保设备性能达到设计要求。