基于TMS320F2812的数据采集与CAN总线传输
- 格式:pdf
- 大小:14.52 MB
- 文档页数:84

TMS320F2812中文手册第1章芯片结构及性能概述TMS320C2000系列是美国TI公司推出的最佳测控应用的定点DSP芯片,其主流产品分为四个系列:C20x、C24x、C27x和C28x。
C20x可用于通信设备、数字相机、嵌入式家电设备等;C24x主要用于数字马达控制、电机控制、工业自动化、电力转换系统等。
近年来,TI公司又推出了具有更高性能的改进型C27x和C28x系列芯片,进一步增强了芯片的接口能力和嵌入功能,从而拓宽了数字信号处理器的应用领域。
TMS320C28x系列是TI公司最新推出的DSP芯片,是目前国际市场上最先进、功能最强大的32位定点DSP芯片。
它既具有数字信号处理能力,又具有强大的事件管理能力和嵌入式控制功能,特别适用于有大批量数据处理的测控场合,如工业自动化控制、电力电子技术应用、智能化仪器仪表及电机、马达伺服控制系统等。
本章将介绍TMS320C28x系列芯片的结构、性能及特点,并给出该系列芯片的引脚分布及引脚功能。
1.1 TMS320C28x 系列芯片的结构及性能C28x系列的主要片种为TMS320F2810和TMS320F2812。
两种芯片的差别是:F2812内含128K×16位的片内Flash存储器,有外部存储器接口,而F2810仅有64K×16位的片内Flash存储器,且无外部存储器接口。
其硬件特征如表1-1所示。
表1-1 硬件特征特征 F2810 F2812 指令周期(150MHz) 6.67ns 6.67ns SRAM(16位/字)18K 18K 3.3V片内Flash(16位/字) 64K 128K 片内Flash/SRAM的密钥有有有有 Boot ROM掩膜ROM 有有外部存储器接口无有事件管理器A和B(EVA和EVB)EVA、EVB EVA、EVB*通用定时器 4 4*比较寄存器/脉宽调制 16 16*捕获/正交解码脉冲电路 6/2 6/2 看门狗定时器有有 12位的ADC 有有*通道数 16 16TMS320C28x系列DSP的CPU与外设(上) ?2?续表特征 F2810 F2812 32位的CPU定时器 3 3 串行外围接口有有串行通信接口(SCI)A和B SCIA、SCIB SCIA、SCIB 控制器局域网络有有多通道缓冲串行接口有有数字输入/输出引脚(共享)有有外部中断源 3 3 核心电压1.8V 核心电压1.8V 供电电压 I/O电压3.3V I/O电压3.3V 封装128针PBK 179针GHH,176针PGF 温度选择‡ A:-40? ~ +85? PGF和GHH PBK S:-40? ~ +125? 仅适用于TMS 仅适用于TMS 产品状况‡‡产品预览(PP) AI AI 高级信息(AI)(TMP)‡‡‡ (TMP)‡‡‡ 产品数据(PD)注:‡ “S”是温度选择(-40? ~ +125?)的特征化数据,仅对TMS是适用的。

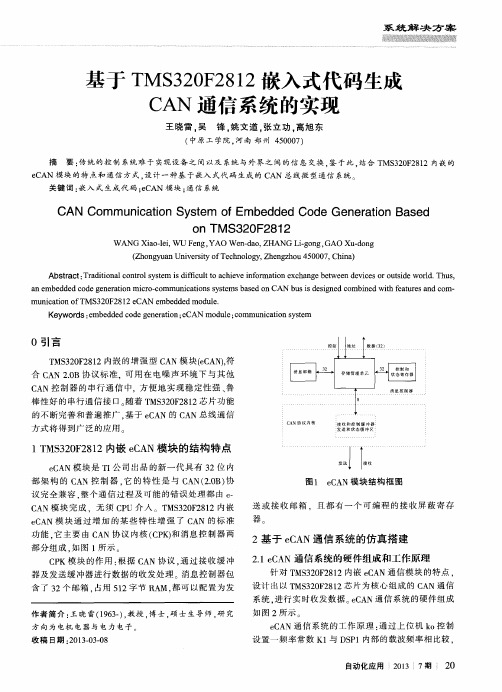
基于DSP的CAN总线通信的设计与实现李璐;张宏川;张爱玲【摘要】本文介绍了TMS320F2812的eCAN模块与TMS320LF2407的CAN模块之间通信以及两者与广州致远的CAN-USB I智能接口卡之间通信时CAN控制器的硬件电路设计及应用方法.利用该方法可以在波特率高达1Mbps的条件下可靠、稳定地传输数据,而且时间延时很小.在双PWM变频调速系统中的应用结果表明了该方法的可行性.【期刊名称】《电气技术》【年(卷),期】2011(000)005【总页数】4页(P13-16)【关键词】CAN总线;数据通信;TMS320F2812;TMS320LF2407【作者】李璐;张宏川;张爱玲【作者单位】太原理工大学电气与动力工程学院,太原,030024;太原理工大学电气与动力工程学院,太原,030024;太原理工大学电气与动力工程学院,太原,030024【正文语种】中文CAN总线是一种支持分布式控制和实时控制的串行通信网络,由于其独特的设计思想和高可靠性,使其有较高的通信速率和较强的抗干扰能力,可以作为现场总线应用于电磁噪声比较大的场合。
CAN总线已经成为最有发展前途的现场总线之一。
许多微处理器都将 CAN控制器嵌入到系统中,成为片上的微处理器,TI公司推出的 TMS320F2812和TMS320LF2407就在其中。
这种结构成本低、运行稳定、功能完备,是一种很有前途的 CAN通信系统组成方案。
上述两种DSP上的CAN 模块有所不同,TMS320F2812DSP片上的增强型CAN控制器eCAN模块,其性能比TMS320LF2407DSP内嵌CAN控制器有较大的改进。
本文主要介绍TMS320F2812的eCAN模块与 TMS320LF2407的CAN模块之间通信以及两者与广州致远的CAN-USB I智能接口卡之间通信时CAN控制器的硬件电路以及软件设计,同时对程序运行结果进行了分析,实验证明了这种通信方式的可行性,并在双PWM变频调速系统中得到了应用。


题目:基于TMS320F2812的DSP最小系统设计要求:TMS320F2812的DSP最小系统设计包括两个模块,即硬件设计模块和软件检测模块。
硬件设计模块包括电源设计、复位电路设计、时钟电路设计、存储器设计、JTAC接口设计等。
软件检测模块需要编写测试程序。
用Protel软件绘制原理图和PCB图。
从理论上分析,设计的系统要满足基本的信号处理要求。
DSP主要应用在数字信号处理中,目的是为了能够满足实时信号处理的要求,因此需要将数字信号处理中的常用运算执行的尽可能快。
这就决定了DSP的特点和关键技术。
适合数字信号处理的技术:DSP包涵乘法器,累加器,特殊地址发生器,领开销循环等;提高处理速度的技术:流水线技术,并行处理技术,超常指令等。
DSP对元件值的容限不敏感,受温度、环境等外部参与影响小;容易实现集成;VLSI 可以时分复用,共享处理器;方便调整处理器的系数实现自适应滤波;可实现模拟处理不能实现的功能:线性相位、多抽样率处理、级联、易于存储等;可用于频率非常低的信号。
关键词: TMS320F2812,CCS3.3,Protel99SE软件目录第1章绪论第2章系统设计2.1系统方案介绍2.2 系统结构设计第3章硬件电路设计3.1 TMS320F2812芯片介绍3.2电源及复位电路设计3.3 时钟电路设计3.4 DSP与JTAG接口设计3.5 DSP的串行接口设计3.6 通用扩展口设计3.7 总体电路原理图设计第4章软件设计4.1 程序设计4.2 仿真调试总结参考文献附录1:总体电路图附录2:程序代码第1章绪论数字化已成为电子、通信和信息技术的发展趋势与潮流。
在这种趋势与潮流的推动下,数字信号处理的理论与实现手段获得了快速的发展,已成为当代发展最快的学科之一。
而DSP芯片作为数字信号处理,尤其是实时数字信号处理的主要方法和手段,自20世纪70年代末、80年代初诞生以来,无论在性能上还是在价格上,都取得了突破性的迅猛发展。
关于F2812的CAN问题关于F2812的CAN问题2812得can说起来不复杂,但是我调了有一段时间。
我是看了T I提供得例子程序,然后修改放在自己上面得,刚开始得时候不知道为什么总是不行,后来在网上搜,问别人,答案都不让人满意。
于是我就放置了,过了一段时间再拿出来看,问题却解决了。
我很感叹自己从中得经历,所以将自己开发得过程和得出得教训写给大家,以供参考。
我是先参考TI得例子程序来做得,TI得例子程序可以从网站上下载。
can得例子程序是自测试得,而且程序是再ram里面跑得,修改和下载都比较方便,只是没有用到滤波,中断,标准模式,我想这些也是比较容易添加得,前提是要资料看会了,还有个办法就是参考ca n得例子程序,这个文件名是《Programming Examples for the TM S320F281x eCAN.pdf》里面有不少例子。
快说糊涂了,其实我想说明4个问题,1 怎么样快速得得到自己得程序 2 can接收到发送方得id后怎么存放得。
3 发送邮箱得数据修改4 发送和接收中断得使用1 怎么样快速得到自己得程序参考ti提供得例子程序,先将他们得例子在自己得板子上跑起来,其实就是用自测试得方式来验证一下程序,也可以加些中断,看看程序怎么跑得。
这步没问题得话,可以改写程序,当然还在自测试模式下先试,如果可以改写后,在自测试模式下可以。
那么就差不多了,将自测试模式改成正常模式,将程序移植到自己得程序中,拿一个经过验证可以正常通讯得can模块通讯,记得两个can得速率要一致。
当然这个can模块还要能让你看到或者说能验证你得can是否通讯正常。
例如can转232接口得板子,如果收到你得can数据通过232口输出到电脑上。
我经过验证,ti得例子基本上,只要将自测试模式改成正常模式,基本上就可以正常通讯。
修改成那种方式,可以参看《Programming Examples for the TMS320F281x eCAN.pdf》2 can接收id得问题如果在不使用滤波得情况下,基本不用考虑id因为只有相同id得才能接收。
XINTF信号XA[0]~XA[18] --- 19位地址总线XD[0]~XD[15] --- 16位数据总线XMP/MC` --- 1 -- 微处理器模式 --- XINCNF7有效0 -- 微计算机模式 --- XINCNF7无效XHOLD` --- 外部DMA保持请求信号。
XHOLD为低电平时请求XINTF释放外部总线,并把所有的总线与选通端置为高阻态。
当对总线的操作完成且没有即将对XINTF进行访问时,XINTF释放总线。
此信号是异步输入并与XTIMCLK同步XHOLDA` --- 外部DMA保持确认信号。
当XINTF响应XHOLD的请求时XHOLDA呈低电平,所有的XINTF总线和选通端呈高阻态。
XHOLD 和XHOLDA信号同时发出。
当XHOLDA有效(低)时外部器件只能使用外部总线XZCS0AND1` --- XINTF区域O和区域1的片选,当访XINTF区域0或1时有效(低)XZCS2` --- XINTF区域2的片选,当访XINTF区域2时有效(低)XZCS6AND7` --- XINTF区域6和区域7的片选,当访XINTF区域6或7时有效(低)XWE` --- 写有效。
有效时为低电平。
写选通信号是每个区域操作的基础,由XTIMINGX寄存器的前一周期、当前周期和后一周期的值确定XRD` --- 读有效。
低电平读选通。
读选通信号是每个区域操作的基础,由xTIMINGX寄存器的前一周期、当前周期和后一周期的值确定。
注意:XRD`和XWE`是互斥信号XR/W` --- 通常为高电平,当为低电平时表示处于写周期,当为高电平时表示处于读周期XREADY --- 数据准备输入,被置1表示外设已为访问做好准备。
XREADY可被设置为同步或异步输入。
在同步模式中,XINTF接口块在当前周期结束之前的一个XTIMCLK时钟周期内要求XREADY有效。
在异步模式中,在当前的周期结束前XINTF接口块以XTIMCLK的周期作为周期对XREADY采样3次。
Electronic Component&Device Applications doi:10.3969/j.issn.1563-4795.2010.02.02266Vol.12No.2Feb.2010第12卷第2期2010年2月 2010.2ElectronicComponent&DeviceApplications度、采样次数等参数。
当完成以上CAN配置之后,还需按照图5所示的流程图来完成数据的发送与接收配置,同时初始化邮箱。
邮箱初始化主要是设置邮箱的标识符和控制域(即发送的是远程帧还是数据帧),以及对相应的邮箱赋初值。
数据接收时,所接收到的信息的标识符必须与相应的接收邮箱的标识符相同,否则该信息将被滤除。
这里,数据的发送与接收请求均采用标志位查询方式。
按照以上步骤设置好后,接着就是对数据的发送与接收请求进行配置。
数据接收可采用中断方式,中断配置可在主程序流程中进行配置。
正确配置中断入口地址及中断函数,并开放CAN接收中断后,还要分别配置不同的数据帧,包括标准帧和扩展帧,以及数据帧和远程请求帧。
图6表示为上位机接收数据的调试界面。
可以看到,CAN通信和下位机间的数据通信,可以写数据并发送给下位机,同时也可接收下位机的数据来验证电路及软件的正确性。
5结束语利用TMS320F2812内嵌的eCAN模块可使得硬件电路设计更为简单而可靠,而且性能也较已有的DSP内嵌的CAN控制器有较大的提高。
同时,采用C语言编程,则可使得程序的设计难度降低,提高程序的可维护性并缩短开发时间。
(a)CAN发送流程(b)CAN接收流程图5CAN系统的发送和接收流程(上接第65页)68。