数字航空摄影测量的相机检校
- 格式:pdf
- 大小:367.21 KB
- 文档页数:3

数字航摄仪(相机)检测系统一、简介作为航空摄影测量的核心——数字航摄仪(相机)是进行自然资源调查、监测的重要手段之一,已经广泛应用自然资源生产领域。
由于数字航摄仪(相机)产品种类繁多、性能各异,良莠不齐,为了加强数字航摄仪(相机)产品质量控制与管理,保证测量结果的准确可靠,国家测绘地理信息计量站(国家光电测距仪检测中心)建立我国首个数字航摄仪(相机)检测系统。
主要由室内光学检测实验室、室内几何检测实验室和野外空对地(几何)检测场和野外空对地(影像)检测场构成。
数字航摄仪(相机)的检测系统,确保了数字航摄仪(相机)测量成果准确可靠和量值统一,并可以溯源至国家计量基准,为数字航摄仪(相机)的检测和质量评价提供了技术支撑。
1、实验室检测光学检测实验室可开展数字航摄仪(相机)的光学分辨率、透过率、杂光系数以及信噪比等项目检测。
几何检测实验室可开展数字航摄仪(相机)的内方位元素、畸变参数、畸变精度等项目检测。
图1 畸变差检测仪图2 聚焦式光管阵列装置2、野外检测场检测野外检测场可开展各类航摄仪(相机)几何精度检测和辐射性能检测。
几何精度检测包括空中三角测量精度检测和立体像对摄影测量精度检测。
辐射性能检测包括动态摄影分辨率、线性度和信噪比等。
空对地(几何)检测场东西宽约7km,南北长约3km,区域气象条件稳定,地形地貌代表性好,包含山地、丘陵和平地等,地形最大高差约在400m左右,空域飞行不受约束的便利条件。
空对地(影像)检测场大小约为10000m2,铺设有满足光谱特性设计要求的永久性标志和各种不同分辨率的靶标,满足数字航摄仪(相机)的辐射性能检测的需要。
图3 空对地(几何)检测场(效果图)图4 空对地(影像)检测场(俯瞰照片)二、特点(1)室内外一体化:独特的实验室检测方法结合野外检测场检测验证,形成室内外检测和验证一体化的检测体系。
(2)产品全覆盖:可实现单面阵、多面阵、多拼和倾斜摄影数字相机高精度检测,适用于不同焦距的数字航摄仪(相机)检测需求。
作业指导书数字航摄仪(五镜头/单镜头)校准方法目录1、范围 (3)2、规范性引用文件 (3)3、术语和计量单位 (3)4、概述 (4)5、计量性能要求 (4)6、通用技术要求 (4)7、计量器具控制 (5)7.1 主要校准器具 (5)7.2 校准场位置及范围 (5)7.3 校准场控制点及检查点要求 (5)8、校准场校准操作步骤 (5)8.1 校准前准备 (5)8.2 空中三角测量精度 (6)8.3动态影像分辨率精度 (7)9、校准结果的不确定度评定................................................. 错误!未定义书签。
9.1数字航摄仪空中三角测量精度不确定度评定................................. 错误!未定义书签。
9.2、数字航摄仪动态影像分辨率不确定度评定 ................................. 错误!未定义书签。
附件1:空中三角测量精度校准结果示例. (7)附件2 量值溯源图....................................................... 错误!未定义书签。
数字航摄仪校准方法1、范围本指导书适用于数字航摄仪(包括数字相机)的校准。
其中,空对地校准适用于所有类型的数字航摄仪(包括数字相机),光学航摄仪(包括光学相机)的校准可参照执行。
2、规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
JJG827分辨力板JJG(测绘)3401-2016 数字航摄仪检定规程JJF 1059.1 国家计量技术规范:测量不确定度评定与表示3、术语和计量单位以下术语和定义适用于本文。
1 光电成像器件photoelectronic imaging device利用光电效应将可见或非可见的辐射图像转换或增强为可观察、记录、传输、存储以及可进行处理的图像的器件系列总称。
航摄测量中的摄影机校正和立体分析在航摄测量领域中,摄影机校正和立体分析是非常重要的步骤。
摄影机校正是指对航摄成像过程中产生的畸变进行校正,以保证获取准确的图像数据。
而立体分析则是利用航摄获取的立体影像数据进行地物的测量和三维模型的生成。
本文将就航摄测量中的摄影机校正和立体分析进行简单的介绍。
1. 摄影机校正1.1 摄影测量原理摄影测量是利用航空或航天平台上的摄影机对地面进行间接测量的技术。
它的原理是通过摄影机将地面上的点投影到成像平面上形成影像,再根据几何关系进行计算。
在这个过程中,摄影机的内外参数需要进行校正以消除畸变。
1.2 内参数校正内参数是指摄影机自身的参数,包括焦距、主点位置、畸变系数等。
校正摄影机的内参数是为了使摄影机能够准确地对地面点成像。
内参数校正一般采用标定板或辅助器具,通过拍摄特定的标定点或标定板进行计算和调整。
1.3 外参数校正外参数是指摄影机相对于地面坐标系的姿态参数,包括摄影机的位置和姿态信息。
外参数校正的目的是确定摄影机的相对位置和姿态,以便在计算过程中准确地转换成像平面坐标为地面坐标。
2. 立体分析2.1 立体像对的获取立体分析需要通过摄影测量技术获取一对具有重叠区域的立体影像,即立体像对。
立体像对可以通过航摄平台自动获取,也可以通过数字影像处理技术进行匹配和构建。
2.2 匹配和视差计算匹配是指确定立体影像对中对应点的过程。
通过分析立体影像中的特征点,利用匹配算法确定对应点的位置,进而计算视差。
视差是两幅影像中对应点的像素偏移量,它代表了地面点的深度信息。
2.3 立体重建在确定对应点的位置和计算视差后,就可以进行地物的三维重建。
通过匹配点之间的视差和航摄参数,可以计算出地物的高程、坐标等信息。
利用这些信息,可以进一步生成地物的三维模型,为地理信息系统、城市规划等领域提供支持。
3. 应用前景摄影机校正和立体分析在航摄测量领域具有广泛的应用前景。
在资源环境调查、地质勘查、城市规划等领域,摄影测量可以提供高精度的地理信息数据,为科学研究和决策提供依据。
航测.No4航测关键点——相机检校参数的获取与优化前言拖了两个月的航测系列,终于来填坑了= =航测第4期,测绘营地为大家详细讲解一下影响航测精度的关键所在——相机检校参数的获取与优化。
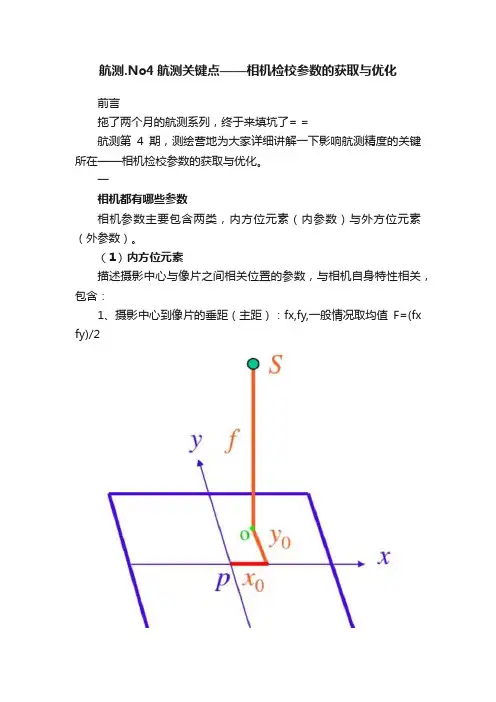
一相机都有哪些参数相机参数主要包含两类,内方位元素(内参数)与外方位元素(外参数)。
(1)内方位元素描述摄影中心与像片之间相关位置的参数,与相机自身特性相关,包含:1、摄影中心到像片的垂距(主距):fx,fy,一般情况取均值F=(fx fy)/22、像主点在框标坐标系中的坐标(主点位置):x0,y03、径向畸变参数:k1,k2,k34、切向畸变参数:p1,p2(2)外方位元素表示摄影中心和像片在空间坐标系中的位置和姿态,与像片拍摄时所处的空间条件有关,包含1、相机位置,即照片中心在世界坐标系中的空间坐标:X,Y,Z2、相机姿态,即相对于航线方向,照片的三个姿态角:航偏角、俯仰角、横滚角问:航测处理时,我们需要重点关注的是哪些?答:焦距F、主点位置x0,y0、径向畸变参数k1,k2,k3、切向畸变参数:p1,p2二如何简单地获取相机参数对于精灵4RTK来说,出厂时已经自带一个检校值,会存储在拍摄的每一张照片中。
为此,为了获取某精灵4RTK相机出厂检校参数,我们只需要利用一个小工具【精灵4RTK相机检校参数解析器】,任意读取一张该相机拍摄的照片即可。
该工具可在公众号后台回复【相机参数】获取。
对应第一节我们讲到的相机参数分类,我们可以看到以下信息:直接复制使用对应参数即可。
但这个小工具仍有一些不足,如:焦距值不是平均值,而是默认取的Fx的值;像元尺寸不够精确:应为2.41左右三如何详细查看与计算相机参数我们将任意一张照片用写字板的方式打开(记事本打开会比较卡),搜索【DewarpData】,然后就可以看到相机的检校参数信息如下:3707.970000000000,3696.130000000000,-8.520000000000,-11.610000000000,-0.271195000000,0.116523000000,0.000629533000,-0.000143233000,-0.0414********需要注意的是,相机参数的存放顺序为:fx,fy,△x0,△y0,k1,k2,p1,p2,k3(其中,fx,fy,△x0,△y0的单位均为像素)然后,我们将这些原始的参数作一些简单计算:(照片分辨率为5472*3648的情况下)F=(fx fy)/2=(3707.97 3696.13)/2=3702.05像素或者F=3702.05像素*2.41微米=8.92194毫米(其中,2.41为一个像素的尺寸大小,具体由来可参考下文:航测.No1 | 如何计算一张大疆精灵4RTK照片拍摄的地面实际大小)x0=5472/2 △x0=5472/2 (-8.52)=2727.48y0=3648/2 △y0=3648/2 (-11.61)=1812.39k1=-0.271195k2=0.116523k3=-0.0414261p1=0.000629533p2=0.000143233在Pix4D、ContextCapture等软件中,均按照以上参数输入保存即可。
文章编号:049420911(2005)1120041202中图分类号:P204 文献标识码:B数字航空摄影测量的相机检校张建霞1,2,3,王留召2,3,4,刘先林3,李天子2,3,郭 辉2,3(1.西安科技大学,陕西西安710054;2.河南理工大学,河南焦作454001;3.中国测绘科学研究院,北京100039;4.昆明理工大学,云南昆明690053)C amera C alibration for Digital Air SurveyZH ANGJian 2xia ,W ANGLiu 2zhao ,LI U X ian 2lin ,LI T ian 2zi ,G UO Hui摘要:介绍数字航空摄影测量中数字相机检校的理论与方法,主要包括检校场的建立、检校的数学模型及解算和检校结果的验证等内容。
通过实例验证与分析得出结论,为数字航空摄影测量系统研究的后续工作提供基础性的保证。
关键词:数字影像;相机检校;检校参数;航空摄影测量 收稿日期:2005204205基金项目:河南省科技攻关资助项目(0524220043)作者简介:张建霞(19752),男,江苏淮安人,讲师,主要从事摄影测量教学和研究工作。
一、引 言目前国内航空摄影测量仍然大量使用进口的模拟航空摄影相机,不仅价格昂贵,要使用胶片,还要用昂贵的仪器进行胶片影像数字化,而且胶片动态范围小(6~7bit ),航摄质量低,测图周期长,影响整个行业进步。
另外,近几年国家每年有1亿多元的航空摄影任务,以国家、集体,甚至个人等形式的航摄队伍,都难以完成,只有发展新的数字航空摄影测量系统,才能适应这一需要。
航空摄影用数字相机是数字航空摄影测量的关键设备,而数字相机不是专门为摄影测量设计的,是非量测相机,其内方位元素无法直接测定,也存在较大的光学畸变差。
因此,数字相机的严格检校是数字航空摄影测量的基础性工作之一。
二、数字相机检校1.数字相机及其检校数字相机是由传统相机演变而来,仍使用传统的光学系统,只是图像信息的载体发生了变化,在原有胶片的位置换上了CC D 芯片。
航空摄影测量规范
航空摄影测量是利用航空摄影技术对地面进行测量和制图
的方法。
为了确保数据的准确性和一致性,航空摄影测量
需要遵循一定的规范和标准。
以下是一些常用的航空摄影
测量规范:
1. 相机校准:在进行航空摄影之前,需要对相机进行校准。
校准包括内部参数和外部参数的确定,以及畸变的校正。
2. 航空摄影参数:航空摄影的参数包括飞行高度、航向、
侧向摆角、重叠度等。
这些参数需要根据具体的测量任务
来确定,以保证测量结果的精度和完整性。
3. 像控点的布设:在摄影测量中,需要设置一系列的像控
点以提供地面的控制信息。
像控点的布设需要考虑地形地貌、摄影任务的需求以及测量精度要求等因素。
4. 影像处理和配准:航空摄影后,需要对航空影像进行处理和配准,以获得准确的地理位置信息。
处理包括影像的几何校正、辐射校正、色彩平衡等。
5. 点和线的测量:通过航空影像,可以获取地面上的点和线的坐标信息。
测量需要采用专业的软件和方法,以保证测量精度和一致性。
6. 数字制图:最后,根据测量结果,可以进行数字制图。
数字制图的规范包括图幅的设置、符号和线型的规范、图件的比例和尺寸等。
这些是常用的航空摄影测量规范,不同的测量任务和地区可能会有一些特殊的规范要求,需要根据实际情况进行确定和遵守。
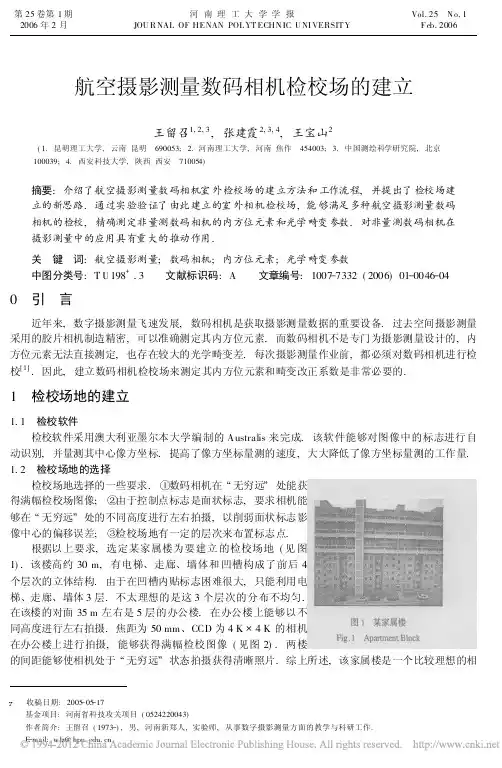
航空摄影测量数码相机检校场的建立王留召1,2,3,张建霞2,3,4,王宝山2(1.昆明理工大学,云南昆明 690053; 2.河南理工大学,河南焦作 454003; 3.中国测绘科学研究院,北京100039; 4.西安科技大学,陕西西安 710054)摘要:介绍了航空摄影测量数码相机室外检校场的建立方法和工作流程,并提出了检校场建立的新思路.通过实验验证了由此建立的室外相机检校场,能够满足多种航空摄影测量数码相机的检校,精确测定非量测数码相机的内方位元素和光学畸变参数.对非量测数码相机在摄影测量中的应用具有重大的推动作用.关 键 词:航空摄影测量;数码相机;内方位元素;光学畸变参数中图分类号:T U198+.3 文献标识码:A 文章编号:1007O 7332(2006)01O 0046O 040 引 言近年来,数字摄影测量飞速发展,数码相机是获取摄影测量数据的重要设备.过去空间摄影测量采用的胶片相机制造精密,可以准确测定其内方位元素.而数码相机不是专门为摄影测量设计的,内方位元素无法直接测定,也存在较大的光学畸变差.每次摄影测量作业前,都必须对数码相机进行检校[1].因此,建立数码相机检校场来测定其内方位元素和畸变改正系数是非常必要的.1 检校场地的建立1.1 检校软件检校软件采用澳大利亚墨尔本大学编制的Australis 来完成.该软件能够对图像中的标志进行自动识别,并量测其中心像方坐标.提高了像方坐标量测的速度,大大降低了像方坐标量测的工作量.1.2 检校场地的选择检校场地选择的一些要求.¹数码相机在/无穷远0处能获得满幅检校场图像;º由于控制点标志是面状标志,要求相机能够在/无穷远0处的不同高度进行左右拍摄,以削弱面状标志影像中心的偏移误差;»检校场地有一定的层次来布置标志点.根据以上要求,选定某家属楼为要建立的检校场地(见图1).该楼高约30m,有电梯、走廊、墙体和凹槽构成了前后4个层次的立体结构.由于在凹槽内贴标志困难很大,只能利用电梯、走廊、墙体3层.不太理想的是这3个层次的分布不均匀.在该楼的对面35m 左右是5层的办公楼.在办公楼上能够以不同高度进行左右拍摄.焦距为50mm 、CCD 为4K @4K 的相机在办公楼上进行拍摄,能够获得满幅检校图像(见图2).两楼的间距能够使相机处于/无穷远0状态拍摄获得清晰照片.综上所述,该家属楼是一个比较理想的相第25卷第1期2006年2月河南理工大学学报JOU R NAL OF HENAN POL YT ECHN IC U NI VERSIT YVol.25 N o.1F eb.2006y 收稿日期:2005O 05O 17基金项目:河南省科技攻关项目(0524220043)作者简介:王留召(1973O ),男,河南新郑人,实验师,从事数字摄影测量方面的教学与科研工作.E O mail:w lz@机室外检校场地.1.3 控制点标志的选择和制作1.3.1 控制点标志的选择检校场控制点人工标志类型较多(见图3)[2].依据Aus -tralis 软件的功能要求,经过多次实验,最终选定图3(d)标志作为此检校场的控制点标志.标志的大小为直径60m m.1.3.2 利用反射片测量距离可靠性实验为方便测量控制点标志中心坐标,在人工标志的中心粘贴带有十字丝刻划的反射片.由于反射片带有十字丝刻划,其既可用来测量距离又可用来瞄准.反射片尺寸为10m m @10mm.经过实验粘贴反射片不影响Australis 软件对标志图像的自动识别.由于反射片面积很小,为保证观测精度,对反射片和棱镜所测距离进行了对比.实验采用一一对比法,在检校场设置田字形9个观测站.将反射片贴在反射棱镜的贴板上,对棱镜和反射片分别测距.理论上二者的平距完全相等.从实验结果(见表1)来看,在该检校场使用范围内,使用反射片所测距离与使用棱镜一致.1.3.3 标志的制作考虑到标志的长期使用性,标志的材料采用不易腐蚀的铝材.最初,材料表面的黑色采用氧化的办法生成,但经过阳光照射后出现了明显的褪色现象,无法达到长期使用的目的.后采用丝网印刷技术将铝标志印成黑色,经实验结果比较稳定.最后制作完成的标志如图4.1.4 控制点坐标的测定检校场控制点的坐标是利用全站仪极坐标法来测定的.以近似垂直家属楼(检校场)正面方向为x 方向,向上为z 方向,左手系构建独立坐标系.两观测控制点设在办公楼顶.由于测量检校场控制点坐标时,一些点的观测倾角较大,直接采用全站仪坐标测量模式(半测回),测点坐标误差将较大.因此,利用全站仪程序中的斜距测量模式(该模式可以记录测点点名、方向值、倾角和斜距)进行测回法观测.根据其数据格式,编制了计算坐标的程序.这样就提高了坐标测量精度.依此方法,采取重新对中,甲、乙、丙3人各观测1遍,取平均值作为最后成果.至此,整个检校场建立完毕[3].2 基于此检校场的数码相机检校表1 利用棱镜和反射片测量距离比对表 mT ab.1 Compar ison of t he Distances AttainedT hrough Reflectiv e P rism and Reflective Sheet点 位棱 镜反射片差 值a 144.83844.8370.001b 139.22439.2240c 141.75141.7510a 245.44545.4450b 239.14939.150-0.001c 241.68241.683-0.001a 346.07346.075-0.002b 340.68540.6840.001c 343.74343.743在办公楼顶和地面的不同位置对检校场的一定区域进行拍摄.利用Australis 软件量测各标志点中心的像方坐标,利用光束法解算内方位元素和畸变改正参数.经多次不同区域测量,所得各项参数很稳定.为验证所得参数的可靠性,用检校过的相机模拟航空摄影拍摄立体像对,拍摄距离为40m 左右.然后利用检定所得相机47第1期 王留召等:航空摄影测量数码相机检校场的建立48河南理工大学学报(自然科学版)2006年第25卷内方位元素和畸变参数对像片进行重采样[4O6],将采样后的像对在JX4上进行处理.取4个控制点作为绝对定向控制点,其余控制点按碎部点进行采点,结果见表2.表2摄测坐标与全站仪测量坐标比较表T ab.2Compar ison of t he Coordinates Attained by Photogrammetr ic and T otal Stations mm 点号$x$y$z点号$x$y$z点号$x$y$z 211 2.70.0 3.3512 2.3 6.7 3.08150.3-3.3-5.3 2120.0-2.0 2.3513 4.3 1.3-6.0901-0.3 6.0 2.0 213 4.00.0 1.0514 3.30.0 2.3902-0.3 6.3-1.3 214 6.7-1.7-7.0601 2.77.0 1.3903-0.3 3.7-7.7 215 6.3-3.3-4.7602 4.0 5.7 1.79040.3 2.0-9.7 301 1.3 2.0 6.0603 5.5 3.5-9.5905-1.3 1.7-5.3 302 4.7 3.7 2.0604 5.00.5-8.51110-1.0 4.77.3 3037.0 1.3-2.0605 3.0 1.3-4.01112-0.3 2.3-6.7 3048.3 1.3-6.7701 1.77.0 2.71113-2.3 1.3-9.3 401 4.7 4.0 3.77020.7 5.30.31114-6.3 2.30.0 402 3.3 5.3-1.3811-1.0 6.7 1.01210-0.7 3.39.3 403 5.3 2.3-8.7812-0.3 6.7-6.31212-2.3 1.3-4.7 4047.70.0-7.7813-0.3 1.0-6.7405 5.3 1.0-7.3814-0.3-2.7-7.7把全站仪测量的坐标作为真值,利用坐标差根据公式m=?[$$]/n,计算x、y、z的中误差,结果如下m x=?3.8m m,m y=?3.7mm,m z=?5.6mm,点位中误差为m o=?m2x+m2y+m2z=?7.7mm.实验结果表明,用这台已检校的数码相机进行近景或低空摄影测量,完全能够满足测制大比例尺地图的精度要求.同时验证了相机检校的正确性,说明了该检校场的建立是成功的.3结论介绍的大型室外航摄相机检校场建立的新途径,通过多种实验验证了检校场的正确性和可靠性.这种检校场能够方便准确地测定非量测性数码相机的内方位元素和畸变改正参数,对非量测数码相机在近景和低空摄影测量中的应用具有重大的推动作用.参考文献:[1]程效军,胡敏捷.数字相机的检校[J].铁路航测,2001,(4):12O14.[2]张祖勋,张剑清.数字摄影测量学[M].武汉:武汉大学出版社,1997.[3]杨朝辉,李浩,杨林.数码相机可量测化的研制[J].测绘工程,2003,12(2):34O37.[4]冯文灏.工业测量[M].武汉:武汉大学出版社,2004.[5]冯文灏.关于近景摄影机检校的几个问题[J].测绘通报,2000,(10):1O3.[6]魏明果,胡宁杰.基于非量测用数码相机的解析数字摄影测量软件开发[J].三峡大学学报:自然科学版,2004,26(1):19O21.Establishment of the Field U sed to Calibrate A erialPhotogrammetric Digital CameraWANG Liu O zhao 1,2,3,ZH ANG Jian O x ia 2,3,4,WANG Bao O shan 2(1.K unming University of S cience and T echnology ,K un ming 690053,China ;2.Hena n Polytec h nic Univer sity ,Jiaoz uo 454000,China;3.Chinese Academy of S urv eying and M apping,Beij ing 100039,China ;4.Xi .an University of Scie nc e and Technology ,Xi .an 710054,China)Abstract:In the paper,establishment technique and process of the field are expounded w hich are used to calibrate dig ital camera and a new idea is proposed.The ex periments have testified that non O mensuration dig ital camera .s interior orientation element and lens distortion parameters w hich are attained through the field are accuracy .The result w ill benefit for non O mensuration digital camera .s application in photogram -metric.Key words:Aerial photogrammetric;Digital camera;Interior orientation element;Lens distortion pa -rameters(责任编校 李文清)我校获2项2006年河南省杰出人才创新基金项目日前,2006年度河南省杰出人才创新基金评审揭晓,我校获得2项省杰出人才创新基金项目.能源学院陆庭侃教授的/深井大断面复杂几何结构巷道的结构优化和支护技术研究0,机械学院米国发教授的/大型铝合金复杂薄壁构件精密铸造技术及实现0获得2006年度省杰出人才创新基金资助,资助金额分别为35万元.省杰出人才创新基金由省科技厅、省财政厅于2001年联合设立,主要支持省内外高层次科技人员针对我省国民经济、社会发展领域中急需解决的共性、关键技术难题进行研究开发和技术创新,培育和建设一支高素质人才队伍,形成一批对我省经济、社会发展有重大影响的创新性科技成果.(洪振涛)49第1期 王留召等:航空摄影测量数码相机检校场的建立。
数字摄影测量相机在航空摄影测量中的探讨崔银江(广东省核工业地质局测绘院,广东广州510800)摘要:文章主要论述将数字摄影测量相机并行到计算航空摄影测量及大比例尺数字化成图中,并概述了在航空摄影测量中的应用和方法。
关键词:数字摄影测量;航空摄影测量;相机1.数字摄影测量相机的成像原理21世纪初,行空出色的数字摄影测量系统对于航空摄影测量的发展有着划时代的意义。
它通过非常直接的得到数字航空影像的形式一举破除了长时间来,以胶片的形式,观察航空影像的局面,真正意义上把航空摄影测量技术引领到了一个全数字摄影测量的时代,并取得了普遍的应用。
数字摄影测量相机的中心部件为镜头,镜头的重要部件则是源于CCD图像阵列传感器,因为科技与经济上的因素,采取胶片式航空摄影仪器并全方位采取CCD芯片的理论理想方案来设计数字摄影测量相机基本上是不可能的。
但是从专业的影像捕捉视域而言,一次曝光在最大程度上可以得到怎样尺寸的地面覆盖的影像还是极为重要的。
所以,数字摄影测量相机采用了多镜头平行操作的设计办法最大程度上确保曝光工作时的地面覆盖水平。
目前,国外内所应用的普遍数字摄影测量相机其光学成像系统主要是依靠4个全色波段和4个多光谱波段构建而成。
全色波段相机焦距均为120mm,沿飞行方向呈2X2矩阵排列,它们之间的距离分别像幅窄边方向为80mm和宽边为170mm。
根据像片视场角公式可以确定全色波段影像单个镜头的航向和旁向视场角分别为23.15ʎ。
和39.44ʎ。
相机镜头对应尺寸为4096*7168像素的CCD阵列,每像素12um。
全色波段影像单个镜头所获取的影像最终被拼接在一起,形成一个尺寸为7680X13824像素的数字影像。
基于此,怎样可以生成类似胶片式航空摄影仪器一次曝光所可以实现的地面覆盖水平,且能够大面积兼容当下的数字摄影测量工作站,是数字摄影测量相机保证摄影效率的重中之重。
2.数字摄影测量相机在航空摄影测量中的质量控制但是,数字摄影测量相机的数字航空摄影系统显然还没有完全革新早已非常成熟的摄影测量理论,数字摄影测量相机的航摄结局已然需要利用对空中三角测量的加密,方可实施工作后续的数字化产品生产。
浅淡数字航空影像质量控制和检查分析摘要:随着科学技术的快速发展,航空摄影技术逐步进入数字化时代,数字航空影像逐步成为航空摄影过程中重要的数据来源,对成图的精度和质量有直接影响,然而在实际操作过程中,数字航空影像的质量检查以及生产都没有形成完整科学的行业要求,导致影像数据在后续处理和应用的过程中产生很多问题,本文对数字航空影像质量控制和检查进行分析研究,以供参考。
关键词:航空影像;数字化;质量检查;控制措施1航空像片的质量检查1.1影像的基本指标数字航空影像的基本指标指的主要是色彩模式、压缩标准数据格式、影像分辨率是对数字营销信息量进行反应的主要参数,现在获取数字航空影像的办法主要是高精度航片扫描仪。
所以它和地面分辨率的概念有些不同,主要是通过扫描分辨率来对其影像分辨率进行描述。
扫描分辨率主要体现的是数字影像当中,对应原始胶片上尺寸大小的像素。
通常条件下,影像扫描需要控制在15到25微米,影像分辨率还需要依照航片的成图比例尺,航片的摄影比例以及航拍质量来共同计算。
一般条件下,一个项目的影像分辨率前后需要相同,否则在进行后续操作的过程中,软件将无法对其进行影像匹配和立体模型显示,TIF格式是现在比较流行的一种图像格式,一般的处理软件和影像扫描仪都可以处理该图像格式,色彩模式主要表示的是影像色彩的类型,比如说彩色模型、灰度模型、二值模型等彩色模型,还可以区分是CMYK彩色空间还是RGB彩色空间。
1.2影像清晰度影像清晰度是对影像质量进行反应的重要指标,清晰的影像不单单可以让物体的判读更明确,还可以让影像匹配成功率提高,并且让目视鉴别精度和目视鉴别能力加强,不清晰的影像主要在以下几点表现,首先影像当中出现杂质,在摄像扫描保存清晰的时候,由于没有进行合理的处理而产生刮痕、毛发、手指印等痕迹。
其次是影像像素较粗。
没有很高的分辨率或者卤化银颗粒比较大,或者是由于扫描的过程中没有设置好采样参数而造成的。
最后是产生图像模糊的情况,主要是原始相片造成的,或者在扫描的过程中压片玻璃没有将胶片压平而导致的。
数码航空摄影测量中相机的检校
邱立勇;郭辉
【期刊名称】《科技情报开发与经济》
【年(卷),期】2008(018)011
【摘要】通过分析数码相机的误差来源,讨论了测定数码相机畸变差的原理与方法,主要包括相机检校的数学模型、检校场的建立、畸变参数的解算与畸变差的改正,并通过实例应用证明了检校的高精度性、可靠性与可行性.
【总页数】2页(P151-152)
【作者】邱立勇;郭辉
【作者单位】广州市番禺城市规划设计院,广东广州,511400;安徽理工大学地球与环境学院,安徽淮南,232001
【正文语种】中文
【中图分类】TB85
【相关文献】
1.数字航空摄影测量的相机检校 [J], 张建霞;王留召;刘先林;李天子;郭辉
2.航空摄影测量数码相机检校场的建立 [J], 王留召;张建霞;王宝山
3.室内控制场数码相机检校应用于通用航空摄影测量的可行性研究 [J], 李伟;任超峰
4.航空摄影测量数码相机检校场的建立 [J], 晋磊;邵岩
5.浅谈航空摄影测量数码相机的检校方法 [J], 丁帅甫;杜巧玲
因版权原因,仅展示原文概要,查看原文内容请购买。
测绘技术中的航空摄影与测量的精度控制方法详解测绘技术是现代科学技术领域中一项重要的技术,它被广泛地运用于国土资源调查、城市规划和土地利用等众多领域。
其中,航空摄影与测量技术作为测绘的核心内容之一,其精度控制方法的研究对于测绘的准确性和可靠性具有至关重要的意义。
航空摄影与测量技术以航空器为平台,通过相机对地面进行影像的拍摄,然后通过空中三角测量以及相关的数据处理方法,进行地形地貌的测量与生成。
在这个过程中,精度控制是确保测绘结果准确性的关键。
在航空摄影中,摄影机的校准和安装是精度控制的第一步。
校准主要包括焦距、主轨、光心和畸变等参数的测量和调整。
焦距是摄影机的核心参数,直接影响测绘结果的立体定位精度。
主轨是指摄影机光心的轨迹,测量主轨可以保证每幅影像之间的相对位置关系准确。
光心是摄影机的光轴位置,通过精确测量和调整光心位置,可使影像与地面实际位置之间的平行关系得到保证。
畸变是指摄影机对景物形状的扭曲,通过畸变修正可以消除影像中的畸变,提高测绘质量。
校准结果的精度要求对于不同的测绘任务而言是不同的,需要根据具体测绘任务来确定校准的精度控制要求。
在摄影测量中,立体像对的投影对准是精度控制的关键。
立体像对的投影对准主要是指将两幅相邻影像中同一地物在重叠区域内按一定的投影线对应准。
传统的投影对准方法主要是基于地形地貌特征的匹配,通过寻找共视点、共线点和共面点等特征,然后进行平差计算,实现两幅影像之间的投影对准。
然而,这种方法对于复杂地形和大变形地区的影像匹配效果较差。
近年来,随着计算机视觉和影像处理技术的快速发展,基于特征点匹配的自动化影像对准方法已经应用于摄影测量中。
此类方法通过提取图像中的特征点,并利用这些特征点之间的几何关系进行准确的像对匹配,实现影像的自动投影对准。
在摄影测量中,立体像对的密接匹配也是精度控制的重要环节。
密接匹配是指将两幅相邻影像中相似特征进行像素级别的匹配。
传统的密接匹配方法主要是基于相关匹配算法,在影像的小区域内进行图像亮度值的相关计算,然后确定最大相关值的像素位置,实现两幅影像之间的像素级别匹配。
航空摄影测量的数码相机参数优化与校正摄影测量是一种以空中照片为数据源,通过测量分析照片上的特征点、几何形状等信息,来获取空中目标的几何、形状和地理空间位置等相关参数的一种测量方法。
航空摄影测量作为航空测绘领域的重要技术手段,对于城市规划、土地利用规划、遥感地图制作等领域具有重要的应用价值。
而数码相机则是航空摄影测量的主要设备之一,在航空摄影测量过程中,相机参数的优化与校正是提高成果精度的关键环节。
一、航空摄影测量中的数码相机参数数码相机是将光信号转换为数字信号的设备,其内部由图像传感器、镜头、光圈、焦平面等组成。
在航空摄影测量中,数码相机参数对于数据采集、图像处理和三维重建等步骤有着重要的影响。
1. 焦距参数焦距是指数码相机镜头的焦点距离,通常以毫米为单位表示。
在航空摄影测量中,焦距参数直接影响到相机获取图像的视角范围和像点尺寸。
通过调整焦距参数,可以控制相机的视角范围,从而选择合适的摄影区域。
2. 地面光斑的大小地面光斑的大小取决于相机的空间分辨率和高程分辨率,而这两个分辨率又与相机的像元尺寸和空中高程的关系紧密相关。
合理选择相机的像元尺寸可以实现较高的空间分辨率和高程分辨率,从而提高测量数据的精度。
3. 透镜变形透镜变形是指数码相机镜头在图像中产生的畸变现象,分为径向畸变和切向畸变两种。
径向畸变是由于镜头的球面曲率导致图像中心位置与边缘位置产生不同程度的形状变化;而切向畸变则是由于镜头轴与图像平面的夹角不垂直而产生的变形效果。
透镜变形会对后续的图像匹配、特征提取和地理位置的精确定位等步骤产生影响,因此需要对其进行优化与校正。
二、数码相机参数的优化方法为了提高航空摄影测量的数据精度,在选择数码相机的同时,还可以通过以下几种方法来进行参数的优化。
1. 系统校正系统校正是指在数码相机工作前对其进行一系列的检查和校正,以保证其输出图像的质量和精度。
例如,可以对相机的白平衡、色彩还原和对比度参数进行优化,以获得更为真实和准确的图像信息。
【导语】2019注册测绘师考试备考正在进⾏中,为了⽅便考⽣及时有效的备考,那么,为您精⼼整理了2019注册测绘师《综合能⼒》考点:航摄仪的检定,欢迎⼤家的关注。
如想获取更多注册测绘师考试的备考资料,请关注的更新。
航摄仪的检定:
1、摄影机检校的内容
⼀般来讲,胶⽚摄影机检校的内容主要包括:
(1)像主点位置(x0,y0)与主距(f)的测定;
(2)摄影物镜光学畸变差或畸变系数⼤⼩的测定;
(3)底⽚压平装置的测定;
(4)框标间距以及框标坐标系垂直性的测定。
对于数字摄影机,检校的内容还应包括像元⼤⼩(x,y⽅向)的测定、调焦后主距变化的测定以及调焦后畸变差变化的测定等。
上述所提到的摄影机检校的内容均属于⼏何检校的范畴。
⼴义上讲,摄影机检校的内容还应包括辐射检校和对影像质量评估的相关内容。
对于多传感器集成的摄影成像系统,还必须考虑系统的检校问题。
2、摄影机检校的⽅法
航空摄影测量的摄影机检校⽅法主要包括实验室检校法和试验场检校法两⼤类。
⼤多数情况下,对摄影机内⽅位元素的确定和物镜光学畸变差的确定是摄影机检校的主要内容。
摄影机的检校⽅法主要有光学实验室检校法、试验场检校法和⾃检校法。
浅谈航空摄影测量数码相机的检校方法作者:丁帅甫杜巧玲来源:《科技视界》 2015年第17期丁帅甫杜巧玲(郑州方纬测绘技术有限公司,河南郑州 451450)【摘要】通过分析航空摄影中数码相机的误差来源及主流校验方法的比较,讨论了相机检校的目的和数学模型、检校场的建立,并在分析实际检测数据的基础上,完善了控制点的获取效率进而改进了控制点的布设方案,验证相机内参数的可靠性,最后通过实验论证了此方法的高精度性、可靠性与可行性。
【关键词】航空数码相机;检校方法;误差来源;数学模型0 前言近年来,随着CCD技术的发展,数字航空摄影测量已成为航测中研究与应用的热点,其相对于传统胶片有明显的优越性,但航空摄影用数码相机取代胶片式相机成为数字航空摄影测量的关键设备。
传统航测所采用的相机为量测相机,其光学畸变小,它可测定内方位元素,有框标装置,其机械结构稳固,摄影中心相对所拍摄影像的相对位置是经过严格检校的。
但是使用胶片相机不仅价格昂贵,还要用昂贵的仪器对胶片影像数字化,而且胶片动态范围小,故航摄数据质量低,测图周期长,影响了整个行业进步。
目前市场上缺乏测量专用的数码相机,航空摄影测量作业中使用的相机大多是使用高档的商业相机,没有检校出内方位元素,镜头畸变大,为了将数码相机应用于航空摄影测量,关键一步就是对相机进行严格的检校,求出相机的内方位元素及各项畸变参数,以便在数据后处理中消除影像的畸变差,使其达到航空摄影测量作业的要求。
本文通过分析数码相机的误差来源,主流校验方法的比较,讨论测定数码相机校验的目的,利用对数码像机检校数学模型的建立、检校场的建立,验证相机内参数的可靠性,最后用实例应用证明了检校的高精度性、可靠性与可行性。
1 数码相机的误差来源数码相机是利用CCD( Charge Coupled Device)将入射相机镜头的光辐射能量转化为数字影像的,CCD传感器感光元的数量为衡量数码相机性能的重要指标[1]。
数码相机检校的原理与过程
主距:镜头主节点到像平面的距离。
主距不是焦距,主距是像距,对于不同的摄影距离,像距不同。
在航空摄影测量中用到的数码相机分为量测型和非量测型两种。
像刘院士 SWDC 使用的是哈苏非量测型相机,我们 TOPDC 使用的是量测型的 Rollei 相机。
所谓量测像机,是指经过精确检校过(定标)的相机,相机的主距是固定的,相机的主距是可以精确设置的;•航空量测像机:RC30,RMK,ADS40,DMC,UltraCamD,TLS
•航天量测像机:SPOT,IKONOS,QuickBird,……
•恒星像机
•近景量测像机:P31,RolleiD30
而非量测像机,像机的主距是随时变化的,如120、135胶卷像机和普通数码相机等。
检校的方法有如下几类:
实验室方法:平行光管法
适合于检校航摄仪等具有固定主距的量测像机。
光学实验室检校法适用于调焦到无穷远处的摄影机的检校,室内的多台固定的准直管可转动的精密测角仪是光学实验室检校法的基本设备。
以准直管作为基本设备时,将多台准直管按准确的已知角 安排在物方,而在像方放置感光片,各准直管上经照明的十字丝即构像在像片上,经对像片的量测,可解得主距和畸变差。
基于控制场的方法:利用GCP和共线方程(包括3D和2D检校场)
对于3D检校场需要有
无需控制场的方法:
基于纯平移的方法:
基于纯旋转的方法
基于灭点的方法:利用场景结构
自检校法:利用相片间的关系
区域网空三自检校法。
文章编号:049420911(2005)1120041202中图分类号:P204 文献标识码:B数字航空摄影测量的相机检校张建霞1,2,3,王留召2,3,4,刘先林3,李天子2,3,郭 辉2,3(1.西安科技大学,陕西西安710054;2.河南理工大学,河南焦作454001;3.中国测绘科学研究院,北京100039;4.昆明理工大学,云南昆明690053)C amera C alibration for Digital Air SurveyZH ANGJian 2xia ,W ANGLiu 2zhao ,LI U X ian 2lin ,LI T ian 2zi ,G UO Hui摘要:介绍数字航空摄影测量中数字相机检校的理论与方法,主要包括检校场的建立、检校的数学模型及解算和检校结果的验证等内容。
通过实例验证与分析得出结论,为数字航空摄影测量系统研究的后续工作提供基础性的保证。
关键词:数字影像;相机检校;检校参数;航空摄影测量 收稿日期:2005204205基金项目:河南省科技攻关资助项目(0524220043)作者简介:张建霞(19752),男,江苏淮安人,讲师,主要从事摄影测量教学和研究工作。
一、引 言目前国内航空摄影测量仍然大量使用进口的模拟航空摄影相机,不仅价格昂贵,要使用胶片,还要用昂贵的仪器进行胶片影像数字化,而且胶片动态范围小(6~7bit ),航摄质量低,测图周期长,影响整个行业进步。
另外,近几年国家每年有1亿多元的航空摄影任务,以国家、集体,甚至个人等形式的航摄队伍,都难以完成,只有发展新的数字航空摄影测量系统,才能适应这一需要。
航空摄影用数字相机是数字航空摄影测量的关键设备,而数字相机不是专门为摄影测量设计的,是非量测相机,其内方位元素无法直接测定,也存在较大的光学畸变差。
因此,数字相机的严格检校是数字航空摄影测量的基础性工作之一。
二、数字相机检校1.数字相机及其检校数字相机是由传统相机演变而来,仍使用传统的光学系统,只是图像信息的载体发生了变化,在原有胶片的位置换上了CC D 芯片。
景物光信号通过CC D 转换为电信号,再由模数转换形成数字影像。
数字相机检校的目的是恢复影像光束的正确形状,即通过检校获取影像的内方位元素和各项畸变系数。
2.数字相机检校内容及误差来源分析数字相机的检校内容包括主点位置(x 0,y 0)的测定;主距(f )的测定;光学畸变系数的测定。
数字相机的误差由光学误差、电学误差和机械误差组成。
光学误差主要是指光学畸变误差,即指相机物镜系统制作、装配引起的像点偏离其理想位置的点位误差,它分为径向畸变差和偏心畸变差两类;电学误差主要包括行同步误差、场同步误差和采样误差;机械误差是指从光学镜头摄取的影像转化到数字化阵列影像所产生的误差,主要由以下两个因素引起:①扫描阵列不平行于光学影像,致使数字化影像相对于光学影像有旋转;②每个阵列元素尺寸不同而产生不均匀变形。
3.数字相机检校的数学模型本检校是一种基于空间后方交会的检校方法。
它以共线方程为基础,以像点坐标作为观测值,解求相机内外方位元素、畸变系数以及其他附加参数的检校方法。
顾及改正项的共线方程式为(x -x 0)+Δx = -fa 1(X -X S )+b 1(Y -Y S )+c 1(Z -Z S )a 3(X -X S )+b 3(Y -Y S )+c 3(Z -Z S )(y -y 0)+Δy = -fa 2(X -X S )+b 2(Y -Y S )+c 2(Z -Z S )a 3(X -X S )+b 3(Y -Y S )+c 3(Z -Z S )(1)以像点坐标为观测值,可列出误差方程式V =AX E +BX I +CX AD -L (2)式中,X E 表示影像外方位元素;X I 表示影像内方位元素;X AD 表示一些附加参数,主要包括光学畸变改正项。
三、检校实例1.概 述本次数字相机检校的数学模型解算引进了墨尔142005年 第11期 测 绘 通 报 本大学的Australis 软件,像点定位和检校数学解算都由该软件完成。
采用的数字相机,其分辨率为4K ×4K,标称焦距为50mm ,影像以DCR 格式存储输出。
检校建立了室外检校场,在某家属楼立面布设了数百个间隔为1.5~2.5m 的控制点标志;该楼高约30m ,宽约为100m ,墙体有电梯、走廊和凹槽,构成了前后四个层次的立体结构。
控制点标志采用黑色的铝片做成,为了提高控制点坐标的获取效率,创造性地在铝片中间粘贴了全站仪棱镜反光片,其标志具体制作见图1。
图1 检校场控制点标志2.检校及结果在不同位置、不同高度和不同角度共拍摄了72张影像。
为以后作为航空相机使用,拍摄距离在40m 以外,与焦距相比,可视为无穷远,获取的影像能充满像幅(见图2)。
利用Australis 软件作数学解算时,将72张影像按拍摄的方位规律地分为3组,每组24张影像。
经检校,所得相机各项参数数值稳定,精度高,内方位元素的检校精度达到微米级,部分数据见表1。
图2 检校影像表1 主要参数检校结果影像组f /mmx 0/mmy 0/mmκ1κ2κ3152.090 0.185660.48642 2.5179E 25-9.3696E 29-2.2281E 212252.094 0.184630.48465 2.5525E 25-1.0014E 28-1.9466E 212352.091 0.187740.48615 2.5374E 25-9.6886E 29-2.0918E 212均值52.09170.186010.485742.5359E 25-9.6907E 29-2.0888E 212 3.检校可靠性验证为验证检校参数的可靠性,利用该相机作了近景立体摄影测量,设置了60个控制点。
利用上述数字相机的检校结果,经摄影测量数学解算,所得结果精度高,达到毫米级精度,表明该数字相机的检校结果正确可靠,部分示例数据见表2。
表2 近景立体摄影测量结果点号原始坐标/m近景摄影测量坐标/m坐标较差/m mXYZXYZΔXΔY ΔZ 103109.93971002.3060962.8713109.94061002.3070962.8695 -0.8 -1.1 -1.8212109.26801004.7630960.3923109.26911004.7640960.3894-1.1-0.5 2.9401104.97171006.8540960.8037104.97171006.8550960.80290-0.60.790697.0883996.5637960.380797.0867996.5634960.3779 1.60.3 2.8121291.04171002.2830962.874391.01321002.2840962.87211.5-1.22.2 利用公式m =±[ΔΔ]/n (3)计算中误差结果为m x =±1.3mm m y =±0.9mm m z =±3.8mm点位中误差为m o =±m 2x +m 2y +m 2z =±4.2mm 四、几点结论笔者目前正参与“轻型机数字航空摄影测量系统”项目的研究工作,数字相机的检校是整个研究工(下转第62页) 参考文献:[1] 江文萍,毋河海,杜清运,等.大型彩色地貌晕渲的自动生成技术研究[J].武汉大学学报(信息科学版),2004, 29(6):4962499.[2] 吴 樊,俞连笙.基于DE M的地貌晕渲图的制作[J].测绘信息与工程,2003,(2):31232.[3] 马海建,郭礼珍,赵 虎.基于DE M生成小比例尺分省彩色晕渲图[J].测绘信息与工程,2004,(8):40241. [4] 郭礼珍,李 霖,张园玉.基于视觉表象的彩色晕渲地图色彩设计[J].武汉大学学报(信息科学版),2004,29(6):4922495.[5] 李志林,朱 庆.数字高程模型[M].武汉:武汉测绘科技大学出版社,2003.[6] 俞连笙,王 涛.地图整饰[M].北京:测绘出版社,1995.[7] 曹纯贫.数字地貌晕渲中若干参数的设置[J].测绘通报,2003,(5):17219.[8] 徐 青.地形3维可视化技术[M].北京:测绘出版社,2000.[9] 王晓延,郭庆胜.基于DE M的地貌晕渲表达方法探讨[J].测绘通报,2003,(8):48250.[10] 江文萍,杜清运.数字地图3维可视化的若干研究与应用[E B/O L].http://w w ,2004210212.[11] 远图工作室.Atlas3D技术文档[E B/O L].http://w w w.,2004210214.(上接第42页)作的基础,决定着所有后续工作的价值和意义,通过检校工作及分析获得以下几点结论:1.相机机身要进行机械固定,否则会引起相机参数的不稳定;2.必须多方位地获取大量的影像才能得到高精度可靠的结果;3.条件允许时,尽可能建立3维检校场以消除检校参数间的病态相关性;4.检校场标志点的建立方法和检校软件Australis的首次使用为今后数字相机的检校提供了成功的范例;5.大面阵数字相机的成功检校为数字航空摄影测量系统研究奠定了前提和基础。
五、展 望胶片摄影被数字摄影所取代已成为必然趋势,数字航空摄影测量系统的研究已成为当前航空遥感领域的研究热点和发展方向,新型数字航空摄影机的应用必将为航空摄影测量技术带来一次变革,并把我国航空摄影测量技术推向数字航空摄影时代。
参考文献:[1] 冯文灏.近景摄影测量[M].武汉:武汉大学出版社,2002.[2] 张祖勋,等.数字摄影测量学[M].武汉:武汉大学出版社,2002.。