理论力学@5点的一般运动和刚体的基本运动
- 格式:doc
- 大小:803.50 KB
- 文档页数:17
理论力学知识点总结理论力学是研究物体运动规律的一门基础物理学科,它主要研究在力的作用下物体的运动状态。
以下是理论力学的知识点总结:1. 基本概念- 力:物体间的相互作用,可以改变物体的运动状态。
- 质量:物体所含物质的多少,是物体惯性大小的量度。
- 惯性:物体保持其运动状态不变的性质。
- 运动:物体位置随时间的变化。
- 静止:物体相对于参照系位置不发生改变的状态。
2. 牛顿运动定律- 第一定律(惯性定律):物体在没有外力作用下,将保持静止或匀速直线运动。
- 第二定律(加速度定律):物体的加速度与作用力成正比,与物体质量成反比,方向与作用力方向相同。
- 第三定律(作用与反作用定律):对于任何两个相互作用的物体,它们之间的作用力和反作用力大小相等、方向相反。
3. 功和能- 功:力在物体上做功,等于力与位移的乘积,是能量转化的量度。
- 动能:物体由于运动而具有的能量,与物体质量和速度的平方成正比。
- 势能:物体由于位置而具有的能量,与物体位置有关。
- 机械能守恒定律:在没有非保守力做功的情况下,系统的机械能(动能加势能)保持不变。
4. 动量和角动量- 动量:物体运动状态的量度,等于物体质量与速度的乘积。
- 角动量:物体绕某一点旋转运动状态的量度,等于物体质量、速度与该点到物体距离的乘积。
- 动量守恒定律:在没有外力作用的系统中,系统总动量保持不变。
- 角动量守恒定律:在没有外力矩作用的系统中,系统总角动量保持不变。
5. 刚体运动- 平动:刚体上所有点的运动状态相同,即刚体整体移动。
- 转动:刚体绕某一点或某一轴的旋转运动。
- 刚体的转动惯量:衡量刚体对转动的抵抗程度,与刚体的质量分布和旋转轴的位置有关。
6. 振动和波动- 简谐振动:物体在回复力作用下进行的周期性振动,其运动方程为正弦或余弦函数。
- 阻尼振动:在阻尼力作用下的振动,振幅随时间逐渐减小。
- 波动:能量在介质中的传播,包括横波和纵波。
7. 分析力学- 拉格朗日力学:通过拉格朗日量(动能减势能)来描述物体的运动。
基础部分——运动学第5 章点的一般运动与刚体的基本运动一、运动学的研究对象及任务点刚体zz几何性质z合成分解例1例2例3例4例5例6二、学习运动学的目的三、运动学的分析方法矢量工具数值求解工具四、具体内容第5章点的一般运动与刚体的基本运动点的运动的矢量法点的运动的直角坐标法点的运动的弧坐标法一、运动方程二、轨迹三、点的速度O)(t r )(t t Δ+r vMM ′位矢四、点的加速度点的运动的矢量法一、运动方程点的运动的直角坐标法O rMxy z)(zy,x,xyz二、轨迹方程三、点的速度四、点的加速度AB点的运动的弧坐标法运动轨迹原点O 一、运动方程sMO)(−)(+正方向弧坐标s二、自然轴系主法线n 切线τ,指副法线b思考:共同点不同点)(t r M O三、点的速度⋅lim ⋅st s d d d d r⋅τ⋅=v tsv d d =)(t t Δ+r vM ′sΔO)(−)(+r Δτ四、点的加速度速度大小随时间的变化率方向ττa 22t d d d d tst v ==22t d d d d tst v a ==z切向tas t ΔΔ⋅→Δτ0lim⋅速度方向随时间的变化率z法向n a sΔΔτs ΔΔϕsd d ϕ→方向?n2n2taa +全t 讨论:加速减速[例5-1]纯滚动解:(1)运动方程运动方程=x =y (2)速度22yxv v +t ωcos 22−(3)切向、法向加速度思考:如何求速度投影加速度投影全加速度22a a yx +法向加速度2t2aa −曲率半径(4)运动方程(弧坐标)如何取弧坐标的原点?讨论:Array纯滚动速度为零加速度不为零5-4-1 平行移动(平移)任一直线z形状相同z速度相同z加速度相同5-4-2 定轴转动=矢量表示:=右手规则滑动矢量αωαkz线速度v(弧坐标法)Rv ω=Rna ta αta 方向?z加速度aRa α=t Ra 2n ω=2n2t aa +42ωα+t a α思考:过轴的任一条直线上θαθrωv ×=ααt a rαa ×=t na vωa ×=nr ωr×=td d αααx ′y ′z ′1O i ′j ′k ′rωv ×=[例5-2]解:r ω=+d d r tω−=avtr R +=22ππ[思考题]j i i k ⎜+′⎟⎜′⋅+′⎟′⋅提示:5-5-1 注意区别几组公式5-5-2 描述点的运动的其它方法点的一般运动与刚体基本运动点的一般运动刚体基本运动矢量法直角坐标法弧坐标法其它方法平移定轴转动5-5-3 本章知识结构框图补充:轮系的传动比一、齿轮传动z速度z 切向加速度外啮合内啮合=两齿轮之传动比:21=1 2112R R i ==ωω2112ωω=i 22211±=±=±=正号內啮合负号外啮合11±=外啮合转向推广:二、带轮(链轮)传动二、带轮(链轮)传动z z 皮带与带轮间无相对滑动。
理论力学运动学知识点总结第一篇:理论力学运动学知识点总结运动学重要知识点一、刚体的简单运动知识点总结1.刚体运动的最简单形式为平行移动和绕定轴转动。
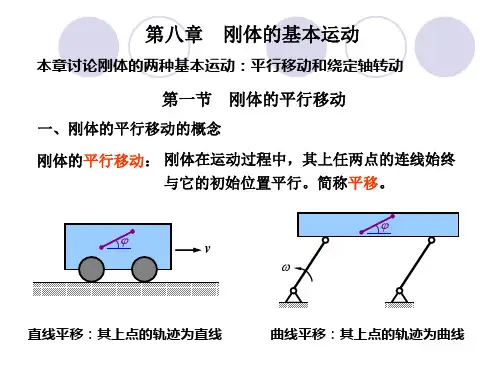
2.刚体平行移动。
·刚体内任一直线段在运动过程中,始终与它的最初位置平行,此种运动称为刚体平行移动,或平移。
·刚体作平移时,刚体内各点的轨迹形状完全相同,各点的轨迹可能是直线,也可能是曲线。
·刚体作平移时,在同一瞬时刚体内各点的速度和加速度大小、方向都相同。
3.刚体绕定轴转动。
• 刚体运动时,其中有两点保持不动,此运动称为刚体绕定轴转动,或转动。
• 刚体的转动方程φ=f(t)表示刚体的位置随时间的变化规律。
• 角速度ω表示刚体转动快慢程度和转向,是代数量,以用矢量表示。
,当α与ω。
角速度也可• 角加速度表示角速度对时间的变化率,是代数量,同号时,刚体作匀加速转动;当α 与ω异号时,刚体作匀减速转动。
角加速度也可以用矢量表示。
• 绕定轴转动刚体上点的速度、加速度与角速度、角加速度的关系:。
速度、加速度的代数值为。
• 传动比。
一、点的运动合成知识点总结1.点的绝对运动为点的牵连运动和相对运动的合成结果。
• 绝对运动:动点相对于定参考系的运动;• 相对运动:动点相对于动参考系的运动;• 牵连运动:动参考系相对于定参考系的运动。
2.点的速度合成定理。
• 绝对速度:动点相对于定参考系运动的速度;• 相对速度:动点相对于动参考系运动的速度;• 牵连速度:动参考系上与动点相重合的那一点相对于定参考系运动的速度。
3.点的加速度合成定理。
• 绝对加速度:动点相对于定参考系运动的加速度;• 相对加速度:动点相对于动参考系运动的加速度;• 牵连加速度:动参考系上与动点相重合的那一点相对于定参考系运动的加速度;• 科氏加速度:牵连运动为转动时,牵连运动和相对运动相互影响而出现的一项附加的加速度。
• 当动参考系作平移或 = 0,或与平行时,= 0。

95第5章 点的一般运动和刚体的基本运动 5.1 主要内容5.1.1 点的运动的表示法研究如何描述一个几何点(即动点)在空间运动的规律。
物体的运动是相对于某一参照物而言,离开参照物,无法确定物体在空间的位置。
这一特点称为运动的相对性。
通常以地球为参照系。
在同一参照系上,可以建立不同的坐标系来描述物体的位置及其随时间的变化。
如本章讨论的各种坐标系。
点的运动方程描述动点在空间的几何位置随时间的变化规律。
对于不同的坐标系,将有不同的形式。
1.矢量式()t r r =其中r 是点的矢径。
此式主要用于理论推导。
2.直角坐标形式—用于轨迹未知的情形建立直角坐标系Oxyz ,动点M 的位置由其在坐标系中的x ,y ,z 坐标确定。
()()()()()()t f t z z t f t y y t f t x x 321,,======上式亦可看作点的运动轨迹的参数方程。
如果消去时间参数t ,即可得到轨迹的曲线方程,它是下列两空间柱面方程的交线。
()0,=y x ψ ()0,=z y ψ3.弧坐标形式(自然法)—用于轨迹已知的情形 在轨迹上建立弧坐标系,以s 为弧坐标。
()()t f t s s ==点的速度是个矢量,它反映点的运动的快慢和方向。
点的加速度是个矢量,它反映速度大小和方向随时间的变化率。
1.矢径法r rv a r r v =====22d d d d ,d d tt t 2.直角坐标法96 ⎪⎪⎪⎭⎪⎪⎪⎬⎫======z t z v yt y v x t x v z y x d d d d d d ⎪⎪⎪⎭⎪⎪⎪⎬⎫=========z t z t v a y t y t v a x t x t v a z z y y x x222222d d d d d d d d d d d d , k j i v z y x ++=,k j i a zy x ++=222z y x ++=v ,222zy x ++=a 3.弧坐标法τττv v s t s ===d d τττa ττa s tv=== d dn n a n n a v ==ρ20=b ab n τa a a a ++=22n a a +=τa切向加速度τa 只反映速度大小随时间的变化,法向加速度n a 只反映速度方向随时间的变化。
0>⋅v a τ:加速运动 0τ<⋅v a :减速运动 几种特殊运动(1)直线运动 ∞→≡ρ,0n a (2)圆周运动 常数(圆的半径)=ρ (3)匀速运动 0≡τa (4)匀变速运动 常数=τa5.1.2 刚体的基本运动刚体的平行移动和定轴转动称为刚体的基本运动。
是刚体运动的最简单形态,刚体的复杂运动均可分解成若干基本运动的合成。
刚体平动的特点是:刚体上各点的轨迹形状、速度及加速度相同。
因此,只要求得刚体97上任一点的运动,就可得知其它各点的运动,从而确定整体运动。
刚体绕定轴转动用角坐标ϕ确定定轴转动刚体的位置。
运动方程)()(t t f ϕϕ==角速度ϕϕω ==t d d 角加速度ϕωε ==td d 转动刚体上各点的速度分布ωR v =转动刚体上各点加速度分布ετR a = 2ωR a n = R 为点到转轴的距离。
矢量表示法ωk ω= ω为ω在z 轴上的投影; εk ε= ε为ε在z 轴上的投影。
定轴转动刚体上各点速度v 及加速度a 的计算: r v ⨯=ω v r a ⨯+⨯=ωε r a ⨯=ετ, 切向加速度; v a n ⨯=ω, 法向加速度。
n a a a +=τ其中r 为由转动轴上任一点引向该点的矢径。
5.2 基本要求1掌握描述运动的矢径法、直角坐标法和弧坐标法,能求点的运动轨迹,能熟练地求解与点的速度和加速度有关的问题。
2熟悉刚体平动和定轴转动的特征。
能正确判断作平动的刚体和定轴转动的刚体 3能熟练地求解与定轴转动刚体的角速度、角加速度以及刚体内各点的速度和加速度有关的问题。
熟悉角速度、角加速度及刚体内各点速度和加速度的矢量表示法。
5.3 重点讨论三种方法描述同一点的运动,其结果应该是一样的。
如果将矢径法中的矢量r、v、a用解析式表示,就是坐标法;矢量v、a在自然轴上的投影,就得出自然法中的速度与加速度。
直角坐标系与自然轴系都是三轴相互垂直的坐标系。
直角坐标系是固定在参考体上,可用来确定每一瞬时动点的位置。
自然轴系是随动点一起运动的直角轴系(切向轴、法向轴n及副法向轴b),因此,不能用自然轴系确定动点的位置。
自然法以已知轨迹为前提,用弧坐标来建立点的运动方程,以确定动点每一瞬时在轨迹上的位置。
用直角坐标法求速度和加速度是将三个坐标分别对时间取一阶和二阶导数,得到速度和加速度在三轴上的投影,然后再求它的大小和方向。
用自然法求速度,则将弧坐标对时间取一阶导数,就得到速度的大小和方向。
自然法中的加速度,物理概念清楚,和分别反映了速度大小和速度方向改变的快慢程度。
在点的运动学中,问题的类型一般分为三类。
1.已知运动方程,求轨迹、速度、加速度运动量。
这类问题首先要建立点的运动方程,通过求导数运算计算速度和加速度。
2.已知动点的速度或加速度的变化规律,求运动方程。
这类问题可通过积分运算求得运动方程,积分常数由运动的初始条件确定。
3.综合问题。
给出用直角坐标法表示的点的运动方程,需求点沿轨迹的运动方程,点的切向加速度、法向加速度、全加速度及点的曲率半径等。
这类问题表明,可用不同的方法描述同一点的运动问题。
在刚体的基本运动中,首先要判断刚体作何种运动(平动或定轴转动),然后根据刚体的运动选用相应的方法。
对于平动刚体的问题,可归结为点的运动学问题;对于定轴转动刚体的问题,可归结为两类问题。
1.给出刚体转动方程,依次对时间求导数,得到刚体的角速度、角加速度,并求出刚体上任一点的速度、加速度。
2.给出转动刚体的角加速度,经过积分运算,求刚体的转动方程,但需给出初始条件。
5.4 例题分析例5-1已知小环由静止从A开始沿轨迹运动。
︵︵DECD=。
在AB段,加速度为a = g,在︵BCE段,切向加速度ϕτcosga=;求小环在C、D两处的速度和加速度。
9899解 在AB 段,由g a svv t v a ===d d d d 作积分s g v v Rv Bd d 0⎰⎰=得gR v B 22=在︵BCE 段,由ϕϕcos d d d d g R v v t v a ===作积分ϕϕϕd cos d 0gR v v v v B⎰⎰=得ϕsin 222gR v v B +=在C 点处,gR v C 2,2π==ϕ,g a a a g Rv a n c C C C n C4,0,42=====τ 在D 点处,22)()(,)22(,22,848.1,π43ττϕD n D D n D D D a a a g a g a gR v +=+=-==== 3.487g 。
例5-2 A 处抛一石刚能过仓库,取重力加速度g = 10m/s 2; 求 l 为多大可使初速度v 0最小?不计空气阻力。
解 石块的运动方程为20021sin cos gttv y tv x -==θθ 消去t 得轨迹方程)tan 1(2tan 2220θθ+-=x v g x y 将B 、C 两点坐标代入,分别得)tan 1(21tan 20222θθ+-=l v g l (1))tan 1()40(21tan )40(20222θθ++-+=l v g l (2)图5-1100 由式(1)、(2)消去(1+tan 2θ)得20)40(240tan ll l++=θ(3)由式(1)-式(2),得 ⎪⎭⎫ ⎝⎛++=θθtan 1tan )20(20l g v 将式(3)代入上式,令0d d 0=lv ,得l 2+ 40l -800 = 0 解得l = 14.64m 时最小例5-3 半径为r 的车轮在直线轨道上滚动而不滑动,如图5-3示。
已知轮心A 的速度u 是常量,求轮缘上一点M 的轨迹、速度、加速度和轨迹的曲率半径。
解:取Ox y 坐标系如图示。
令0=t 时,M 点位于坐标原点O ,轮心A 位于Oy 轴的A 0点。
设在t 瞬时,轮心和M 点位于图示位置。
由于轮只滚不滑ut A A MC OC ===0(a) 又 rutr MC ==ϕ(b)M 点的x 、y 坐标都是角ϕ的函数 ϕsin r OC BC OC OB x -=-== (c)ϕcos r r AE AC MB y -=-==(d)将式(a )、式(b )代入式(c )、(d )r utr ut x sin-= (e)rut r r y cos -= (f)这就是M 点的运动方程。
消去时间参量t ,得M 点的轨迹方程()⎪⎭⎫⎝⎛-=-+r y r y r y x 1arccos 2这就是旋轮线或摆线方程。
图5-3 ︵ ︵101式(e )、式(f )对时间求一阶导数得速度的投影⎪⎭⎫ ⎝⎛-=r ut u v x cos 1(g)r utu v y sin =(h)M 点的速度的大小和方程余弦为()()MDDE r utv v MD ME r utv v r ut u r ut r ut u v v v y x yx=========⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛-=+=2cos 2cos,cos 2sin 2sin ,cos 2sin2sin cos 12222ϕϕj v i v (i)可见,速度v 恒通过车轮的最高点D 。
式(g )、式(h )对时间求一阶导数得加速度的投影r ut r u t v a x x sin d d 2==r ut r u dt dv a y y cos 2==M 点的加速度的大小和方向余弦为()()MAAEr ut a a MA MEr ut a a ru a a a y x yx==========+=ϕϕcos cos,cos sin sin ,cos 222j a i a 常量 (j)可见,加速度a 恒通过车轮中心A 。
式(i )对时间求一阶导数,得M 点的切向加速度rutr u dt dv a 2cos2==τ (k)式(j )、式(k )代入式(5-21),得M 点的法向加速度rutr u a a a n 2sin222=-=τ由式(5-20)得轨迹在M 点处的曲率半径102rut r a v n 2sin 42==ρ由此可见,当π=rut(对应轨迹的最高点),曲率半径最大,)(2,4max →==u v r ρ )(2↓-=r u a ;当0=r ut 或π2 时(M 点在轨道上),曲率半径最小,,0,0m i n ==v ρ)(2↑=ru a 。
轨迹在这里是两段连续旋轮线的连接点——不连续的尖端点。