传感器课程设计--基于电容压力传感器的液位测量系统设计
- 格式:doc
- 大小:773.12 KB
- 文档页数:7
基于充放电原理的电容式液位传感器测量电路的设计电容式液位传感器是一种用于测量液体水平高度的传感器。
它基于充放电原理,通过测量电容器中电荷的变化量来确定液位高度。
在本文中,我们将介绍如何设计一种基于充放电原理的电容式液位传感器测量电路。
首先,我们需要了解电容器的基本原理。
电容器是由两个电极以及介质隔离层组成的设备。
当电容器两个电极上施加电压时,它们之间会形成电场。
电场越大,电容器电容就越高。
在液位传感器中,我们可以利用电容器的这种原理来测量液位高度。
具体来说,我们可以将电容器放在液体中,其中一个电极将是传感器底部,另一个电极将在液面上方。
因为液体的介电常数是已知的,我们可以使用液位高度来计算电容器的电容值。
测量电路分为两个部分:充电和放电。
在充电过程中,我们将电容器的一个电极接地,将另一个电极和一个恒定的电压源相连。
然后,我们使用一个计时器来计算电容器充电的时间。
充电时间取决于电容器的电容和施加的电压。
在放电过程中,我们断开电压源,并通过另一个计时器来计算电容器放电的时间。
电容器放电的时间取决于它的电容和接收器的输入阻抗。
通过测量充电和放电时间,我们可以计算电容器的电容值。
从而,我们就可以计算出液位的高度。
这是一个简单的电路,基本实现液位高度的测量,但在实际应用中,我们需要加以改进。
为了提高测量精度,我们需要使用更高分辨率的计时器以及更准确的电源。
我们也可以加入计算机或微控制器来读取和处理传感器的测量结果。
总之,基于充放电原理的电容式液位传感器是一种非常有用的测量设备。
只要我们合理设计传感器测量电路,利用计时器和恒定电源等工具,就可以实现准确测量液位高度,并在许多应用中得到应用。
电容式智能液位仪目录目录摘要 (2)1.导言 (3)2.传感器 (4)2.1理想的电容式传感器 (4)2.2电路模型 (5)2.3传感器特性 (6)2.4传感器结构 (7)3.硬件电路设计 (11)3.1硬件电路划分 (11)3.2单片机的选用 (11)3.3直流充放电式电容测量电路设计 (13)3.4信号调理电路设计 (14)3.5单片机电路及模数转化电路设计 (15)3.6通信电路设计 (16)4.系统软件设计 (18)4.1编程环境与编程语言 (18)4.2软件总体设计 (18)5.电容测量电路的实验结果和分析 (19)5.1实验过程及结果 (19)5.2实验分析 (21)参考文献 (22)摘要设计一种多功能智能化液位检测装置,采用ATmega8作为硬件电路核心,以圆柱形电容探头为液位检测传感器,利用电容频率转换原理将电容变化为频率变化,利用单片机检测频率,软件计算液位高度。
本装置具有机械去液面波动,用软件进行温度修正、线性校正、用户自校正,通信和多液体选择等功能。
本文主要创新之处是提出一种适合于波动液面液位检测的智能液位仪,具有温度补偿、用户自校正和通信等功能。
本文设计了高度为100cm的柱形电容液位检测传感器,电容器具有结构简单,电路实现容易,利用555振荡电路实现了电容到频率的转换,利用程序实现频率到高度转换,理论正确可靠,推算过程合理,利用软件分段修正减小了线性误差。
在电容的两端装有液位缓冲器,采用机械的方式减小液面波动。
由实验测试可知,本液位检测装置性能稳定,检测可靠,测量精度达到1cm, 分辨率可0.1cm,达到车载式喷雾机液位检测的要求。
利用此方案可根据需要设计各种量程的液位检测装置,适用性较广。
·2·1.导言河流、水库或容器的液位可以通过测量浸在液体内两电极间的电容而进行监控。
使用电容式传感器进行液位测量,具有以下优点:低成本(即对于传感器有比较成熟的技术)、低功耗、高线性度、对应用场合的几何形状有较高的适应性。
目录一、项目叙述 (1)二、电容式液位传感器的结构与测量原理 (1)2.1电容式液位传感器的结构 (1)2.2电容式液位传感器的工作原理 (2)三、测量电路设计 (3)3.1测量电路 (3)3.2整流电路 (6)3.3放大电路 (7)四、误差分析 (8)4.1机械结构参数的影响 (8)4.2测量电路的影响 (8)五、结论 (8)六、明细表 (9)d AC ε=基于电容压力传感器的液位测量系统设计一、项目叙述在工业自动化生产过程中,为了实现安全快速有效优质的生产,经常需要对液位进行精确测量,继而进行自动调节、智能控制使生产结果更趋完善。
二、电容式液位传感器的结构与测量原理2.1电容式液位传感器的结构电容式传感器是把被测的非电量转换为自身电容量变化的一种传感器。
这些被测量是用于改变组成电容器的可变参数而实现其转换的。
电容式传感器的基本工作原理可以用最普通的平行极板电容器来说明。
两块相互平行的金属极板,当不考虑其边缘效应(两个极板边缘处的电力线分布不均匀引起电容量的变化)时,其电容量为:(1)公式中 ε—— 电容极板间介质的介电常数;A ——两平行板所覆盖的面积;d ——两平行板之间的距离。
因此只要改变其中的一个参数,就会引起电容量的变化,根据这一电容结构关系可构成变极距电容传感器,变面积型电容传感器和变介质型传感器、用于测量液位的电容式传感器。
是利用容器中的物料为恒定的介电常数时,极间电容正比于液位的原理而构成的,并应用电子学方法测量电容值,从而探测液面位置信息。
特点是液位测量只与电容结构有关,与物料的密度无关 根据这一特点,可采用圆筒形结构构成变面积型的液位传感器,这种传感器结构的探头是由这两个电极极板构成,通过气、液或料相介质的高度不同引起极间电容改变来探测物面位置的。
其结构十分简单轻巧,便于安装、维护与使用。
电容式液位传感器的电极结构如图1所示。
图1适用于导电容器中的绝缘液体的液位测量,且容器为立式圆筒形,容器壁为一极,沿轴线插入裸金属棒作为另一极电极,其间构成的电容 C X 与液位成比例,也可悬挂带重锤的软导线作⎪⎭⎫ ⎝⎛H =d D Cln 2122πε()⎪⎭⎫ ⎝⎛-=d D H H C ln 21011πε()101120ln 2H C d D C K +=H -⎪⎭⎫ ⎝⎛+εεπ()()[]1120112101ln 2ln 2ln 2H -+H ⎪⎭⎫⎝⎛=⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛H -H εεεππεπεd D d D H d D 21C C C X +=为电极。
如何利用电容传感技术进行液位测量-设计应用无论是监测咖啡机中的水位,还是当奶瓶快要没奶时发出提醒的智能冰箱。
液位测量在提高产品性能的同时,并从竞争对手中脱颖而出。
技术干货● 电容感应技术可以在任何环境因素下提供可靠的、强大的液位测量解决方案。
● 互电容传感器不易受寄生电容的影响。
● 测量结果的准确性取决于合适的校准、传感器的线性度以及是否能够消除影响性能的因素,比如传导性干扰和环境变化影响。
说到电容感应技术,我们首先想到的是不同设备的用户界面所使用的电容感应按钮。
但这是电容感应技术的用途吗?非也。
该项技术可用于任何系统输入可能引起电容变化的应用。
电容传感器在许多应用中可以取代传统技术,如液体位置测量、湿度感应、金属物体检测等。
它不会受环境条件变化的影响,同时更加可靠和稳定。
液体位置测量也是咖啡机等家用电器的一项重要功能。
它能探测咖啡机中的水位或者奶瓶容器中牛奶的液位,也能探测洗衣机中洗衣液的用量。
液位测量分为两种:● 点液位测量:这种测量方式,传感器被安置在容器上的不同的区域,用于检测容器满或空的状态,并显示单个的较低分辨率的不连续的液位高度。
● 连续液位测量:正如其名所示,这种传感器可以探测到液位的细微变化。
每种传感器都有其各自的使用方式。
本文主要介绍连续测量和确保测量精度的一些重要因素。
目前已有多种液位测量方法,包括:● 磁性浮子:将磁体安装在一个随容器液位变化而移动的浮子上,并会促发杆体中密封的“舌簧开关”。
这种解决方案具有很高的可重复性,但由于磁浮子的可移动性,因此寿命较短,可靠性也较低。
● 超声波传感:传感器传输到液体表面的超声波信号与反射的回波信号之间的延迟被转换为相关容器的液位。
此类系统可以探测的液位取决于收发器的结构。
测量会受到温度、压力和湿度等环境因素变化的影响。
● 导电测量:此类设备通过两个导电电极测量传导性。
这种方法比前两种更可靠,但无法用于可燃液体。
显然,制造商需要更强大、更可靠、更且用途更广泛的液位测量技术。
基于传感器的压力液位检测系统设计简介本文档旨在介绍一种基于传感器的压力液位检测系统的设计。
设计目标该系统的设计目标包括但不限于以下几点:- 实时监测液体的压力和液位;- 提供可靠的数据,以便用户能够准确了解液体的状态;- 高度精度和稳定性;- 易于安装和使用。
系统组成该压力液位检测系统主要由以下几个组件组成:1. 压力传感器:用于测量液体的压力,并将其转化为电信号;2. 液位传感器:用于测量液体的液位,并将其转化为电信号;3. 控制器:接收传感器转化的电信号,并进行处理和分析,以得出液体的压力和液位数据;4. 显示屏:用于显示液体的压力和液位数据,使用户能够直观地了解液体的状态;5. 电源供应:提供系统所需的电力。
工作原理该系统的工作原理如下:1. 压力传感器通过测量液体对其施加的压力,将其转化为相应的电信号;2. 液位传感器通过测量液体的液位高度,将其转化为相应的电信号;3. 控制器接收传感器传来的电信号,并根据预设的算法对其进行处理和分析,从而得出液体的压力和液位数据;4. 显示屏将处理后的数据展示给用户,使其能够直观地了解液体的状态。
实施步骤下面是设计该系统的一般实施步骤:1. 进行需求分析,明确系统的设计目标;2. 选择合适的压力传感器和液位传感器,确保其满足系统要求;3. 设计并实现传感器与控制器之间的连接和数据传输;4. 开发控制器的算法和逻辑,确保准确地计算出液体的压力和液位数据;5. 连接显示屏和控制器,并确保其正常工作;6. 进行系统测试和调试,确保其稳定性和精确性;7. 完成系统的安装和部署,并提供使用说明。
总结基于传感器的压力液位检测系统设计是一个复杂而具有挑战性的任务,但通过合理的规划和实施,我们可以实现高精度和可靠的液体状态监测。
该系统的设计目标、组成和工作原理在本文档中得到了详细阐述,并提供了一般的实施步骤。
希望本文档能为设计和开发基于传感器的压力液位检测系统提供一定的指导和帮助。

水位传感器自动测试系统的设计1 水位传感器的工作原理:水位传感器原理图如图1所示,主要利用电容传感器原理,其电容极板间的距离变化引起电容值的变化而达到水位测试的目的。
极板下边所连空心小球所受浮力的大小与极板的所受重力应满足应满足的条件如公式①,极板间的距离x代表着水位的高低,x与电容值应满足的公式如式②。
图1测试简易图m g≤ρgv ①C=ε A/x ②2测试方案:测试方案流程图如图3所示:由此流程图可以知道是利用电容传感器变化的电容值和高频震荡器电容并联,改变了频率,再由鉴频把它转化成电压信号,在进行放大输出,输出后的电压波形图如图3:图⑴,调频震荡:调频调制原理设载波y(t)=Acos(ω0t),这里角频率ω0为常量。
如果振幅A为常数。
让载波瞬时角频率ω(t)随调制信号x(t)做线性变化,则有:ω(t)=ω0+kx(t)=dθ(t)/dt式中的k为比例因子。
于是调频信号的总相角可以表示为:Θ(t)=∫ω(t)dt=ω0t+k∫x(t)dt+θ0频率调制一般用振荡电路来实现,如图4所示LC振荡电路,变容二极管调制器(电容传感器),组成的电路。
LC振荡电路该电路常用于电容,涡流,电感等传感器作测量电路。
将电容或电感作为调谐参数,则电路的震荡频率为:f0=1/2π√LC0 ③若电容C0的变化量为▲C,则上式变为:f=1/2π√LC0(1+▲C/C0)=f0/√1+▲C/C0 ④将上式按泰勒级数展开并忽略高阶项,得f≈f0(1-▲C/2C0)=f0-▲f ⑤式中:▲f=f0▲C/2C0 ⑥将式①代入式⑥可以得到:▲f= f0εxA/2 C0 ⑦有以上分析可以知道LC振荡电路的振荡频率f与调谐参数呈线性变化关系,亦即振荡频率受控于被测物理量(这里指C0)。
这种被测物理量转化为振荡频率的过程称为直接调频测量。
图4⑵鉴频电路:对调频波的解调也称为鉴频,鉴频的原理是将调频信号频率的变化相应的复原为原来电压幅值的变化。
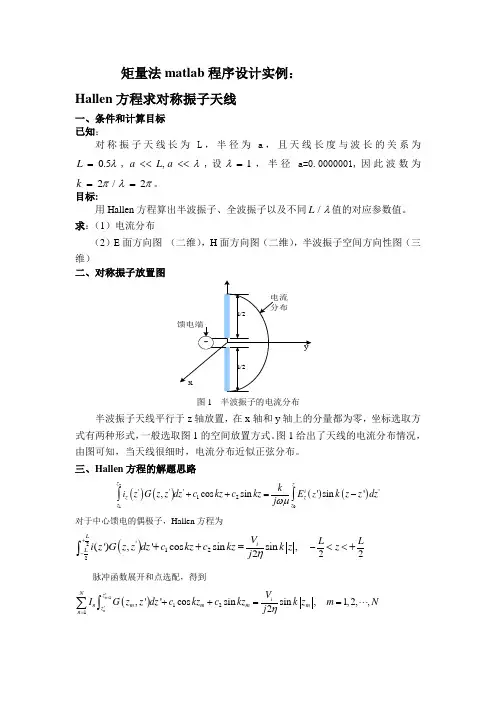
矩量法matlab 程序设计实例:Hallen 方程求对称振子天线一、条件和计算目标 已知:对称振子天线长为L ,半径为a ,且天线长度与波长的关系为λ5.0=L ,λ<<<<a L a ,,设1=λ,半径a=0.0000001,因此波数为πλπ2/2==k 。
目标:用Hallen 方程算出半波振子、全波振子以及不同λ/L 值的对应参数值。
求:(1)电流分布(2)E 面方向图 (二维),H 面方向图(二维),半波振子空间方向性图(三维)二、对称振子放置图图1 半波振子的电流分布半波振子天线平行于z 轴放置,在x 轴和y 轴上的分量都为零,坐标选取方式有两种形式,一般选取图1的空间放置方式。
图1给出了天线的电流分布情况,由图可知,当天线很细时,电流分布近似正弦分布。
三、Hallen 方程的解题思路()()()()21''''12,cos sin sin 'z zi z z z z i z kz G z z dz c kz c kz E k z z dz j ωμ'++=-⎰⎰对于中心馈电的偶极子,Hallen 方程为()22'1222('),'cos sin sin ,2LL iL L V i z G z z dz c kz c kz k z z j η+--++=<<+⎰脉冲函数展开和点选配,得到()1121,''cos sin sin ,1,2,,2nnNz in m m m m z n V I G z z dz c kz c kz k z m N j η+''=++==⋅⋅⋅∑⎰上式可以写成 1122,1,2,,N nmn m m m n Ip c q c s t m N -=++==⋅⋅⋅∑矩阵形式为⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----N N N N N N N N N N N t t t t c c I I I s q p p p s q p p p s q p p p 121211321,322,21,223221,11,11312,,,,,,,,,,,,, 四、结果与分析(1)电流分布图2 不同λ/L 电流分布图分析:由图2可知半波振子天线λ/L =0.5的电流分布最大,馈点电流最大,时辐射电阻近似等于输入电阻,因为半波振子的输入电流正好是波腹电流。
基于电容压力传感器的液位测量系统设计姓名:张宜静班级:电气自动化二摘要:电容式压力传感器是以各种类型的电容器作为敏感元件,将被测压力的变化转换为电容量变化的一种传感器,具有结构简单、高分辨率、可非接触测量,并能在高温、辐射和强烈震动等恶劣条件下工作的独特优点。
随着集成电路技术和计算机技术的发展,促使它扬长避短,成为一种很有发展前途的传感器。
一种测量水位用的电容式传感装置。
电容式传感体将电信号输入线性电容检测电路,促使其方波发生电路与单稳态电路输出脉冲送入与门电路进行复合,从而使与门输出的脉宽变化线性地反映传感体浸入水中后增加的所测量可变电容的变化。
而线性修正电路则弥补检测电路输出所造成的非线性误差。
本实用新型线性好,性能指标优良,线路简便。
关键词:传感器、压力、电容、测量引言:传感器的研究始于二十世纪三十年代,它是研究非电量信息与电量间转换的一门跨学科边缘技术科学。
早期传感器是模拟式传感器,现在常称为传统传感器。
随着高性能计算机测控系统的发展,当系统对传感器提出数字化、智能化要求后,传统传感器不再与系统向适应。
控制系统要求传感器输出数字信号,并具备较强的信息处理和自我管理能力,以实现信息的采集与信息的预处理,减轻控制计算机的数据处理负担和提高整个测控系统的可靠性。
电容传感器的基本理想公式为:改变A 、d 、ε 三个参量中的任意一个量,均可使平板电容的电容量C 改变,固定三个参量中的两个,可以做成三种类型的电容传感器。
1 液位电容式传感器测量原理:导电液体电容式传感器主要利用传感器两电极的覆盖面积随被测液体液位的变化而变化,从而引起电容量变化的关系进行液位测量。
图1为传感器部分结构原理图:2 液位测量系统设计:该系统是由数据测量电路和单片机检测监控系统两个部分组成。
首先,被测电路由电容式传感器与二极管环形桥路组成,如图2所示0 r A A C d dεεε==图1当液体处在圆柱形电极与圆柱形容器之间,由于液面高度不同,引起介电常数变化,导致电容量的变化。
电容式液位计 课程设计一、课程目标知识目标:1. 理解电容式液位计的工作原理与构造,掌握其测量液位的物理基础。
2. 学会分析电容式液位计的电路图,并能解释各部分的功能和相互关系。
3. 掌握影响电容式液位计测量精度的因素,能够列举并解释至少三种主要影响因素。
技能目标:1. 能够运用所学的知识,正确操作电容式液位计进行液位的测量。
2. 通过实践,学会对电容式液位计进行简单的故障诊断和校准。
3. 能够设计简单的液位控制电路,并运用电容式液位计作为传感部件。
情感态度价值观目标:1. 培养学生对物理传感器在工业控制中应用的兴趣,激发学生探索工程技术的热情。
2. 增强学生的团队合作意识,通过小组合作完成实验和项目设计。
3. 培养学生严谨的科学态度,认识到精确测量在工业生产中的重要性。
分析:本课程针对高中年级学生,他们已具备基础的物理知识和一定的电路原理理解能力。
课程性质为实践性与理论性相结合,要求学生在理解电容式液位计理论知识的基础上,通过实践活动加深理解,并将知识应用于解决实际问题。
课程目标旨在通过理论与实践的结合,提升学生的知识应用能力和实践操作技能,同时培养对物理学科的兴趣和正面价值观。
通过具体的学习成果分解,教师可依据目标进行教学设计和评估学生的学习效果。
二、教学内容1. 理论知识:- 电容式液位计的工作原理与物理基础。
- 电容式液位计的电路分析与各部分功能。
- 影响测量精度的因素,包括介质特性、传感器间距、温度等。
- 传感器在工业控制中的应用案例分析。
2. 实践操作:- 电容式液位计的组装与操作流程。
- 液位测量实验,包括不同介质下的测量对比。
- 简单故障的诊断与校准方法。
- 设计并实现一个简单的液位控制电路。
3. 教学大纲安排:- 章节一:电容式液位计的基础知识(1课时)- 章节二:电容式液位计的电路分析与功能(1课时)- 章节三:影响测量精度的因素及解决方案(1课时)- 章节四:实践操作与实验(2课时)- 章节五:液位控制电路设计与实现(2课时)4. 教材关联:- 教科书第三章:传感器及其应用。
目录一、前言 (4)(一)概述 (4)(二)发展前景 (4)(三)设计思想 (4)二、液位控制系统分析 (5)(一)液位控制系统的工作原理 (5)(二)液位控制的实现方式 (5)1、简单的机械式控制方式 (5)2、复杂控制系统控制方式 (5)3、方案选择 (6)三、液位控制系统的设计 (6)(一)硬件设计 (6)1、传感器的选用 (6)2、放大器的选用 (7)3、比较器的选用 (8)4、三极管电子开关 (9)5、继电器的选择 (10)6、输出显示部分 (10)(二)调试过程 (10)1、液位控制系统模型框图 (11)2、调试 (11)五、遇到的问题分析 (11)六、总结 (12)参考文献 (12)液位控制系统设计一、前言传感器技术是现代测量和自动化系统的重要技术之一,从宇宙开发到海底探秘,从生产的过程控制到现代文明生活,几乎每一项技术都离不开传感器。
液位控制在多个领域都有使用,所以实现其自动化检测具有非常重要的意义。
通过压力传感器实现液位控制系统,具有体积小,实际应用系统简单实用,成本低,效益好;具有较高的性能价格比;系统不易受到干扰,可靠性高等优势。
(一)概述在各类传感器中压力传感器具有体积小、重量轻、灵敏度高、稳定可靠、成本低、便于集成化的优点,可广泛用于压力、高度、加速度、液体的流量、流速、液位、压强的测量与控制。
除此以外,还广泛应用于水利、地质、气象、化工、医疗卫生等方面。
在该液位控制系统的设计方案中,所使用的传感器为六角测压测重传感器,将水重量产生的压强转化为电压值输出,通过对电压大小的控制,从而实现传感器在液位控制中的功能。
(二)发展前景由于该技术是平面工艺与立体加工相结合,又便于集成化,所以可用来制成血压计、风速计、水速计、压力表、电子称以及自动报警装置等。
压力传感器已成为各类传感器中技术最成熟、性能最稳定、性价比最高的一类传感器。
国外液位控制系统的发展已相当成熟,我们国内也在朝着这方面努力,而且好多企业与国际接轨,有了不菲的成绩。
基于电容器原理的液位测量系统作者:秦慧娴袁明昱来源:《报刊荟萃(下)》2018年第05期摘要:液位测量系统广泛的应用于生产生活中,常用的测量方法也有很多,如浮球液位计、雷达液位计等。
有些测量方法测量精度较高,耐腐蚀性强,但价格昂贵,受容器几何结构和材料特性影响较大,并且容易受电磁波干扰。
除此以外,在工业领域,也有气泡法测量液位。
将电容器原理和多谐振荡电路相结合而成的基于电容器原理的液位测量方法可准确有效地进行液位测量,具有应用广泛等优点。
关键词:电容器原理;液位测量;多谐振荡电路一、测量原理及方法该装置主要分为电容式传感器、多谐振荡电路两个部分[1]。
其中电容式传感器将液位高度转换为电容的测量,多谐振荡电路又将电容转化为频率的测量,进而可以间接测量出被测液体的高度。
二、液位测量系统设计电容式液位传感器用两个半径不同的圆筒形极板构成,由同高度的不锈钢管与不锈钢管芯各1根,555定时器,示波器1台,电阻若干,二极管,电压源,刻度尺,导线若干组成。
具体装置如图一所示。
向极板间倒入一定量的被测溶液,则极板间共有两种介质,分别为空气和被测溶液。
当传感器内充满单一介质时,电容器的电容值为:,其中L为不锈钢管和不锈钢芯的长度(m),ε为极板间介质的介电常数,R1是内圆桶形极板的外半径[2],R2是外圆桶形极板的外半径。
假设气体的介电常数为ε0,待测液体相对于气体的介电常数为ε1,被测液位高度为H,液体部分电容量为C1,气体部分电容量为C2,则:所以此时的电容:(1)由此公式(1)可看出,在其他参数为定值的情况下,传感器电容的变化只与与液位高度H有关。
多谐振荡电路部分:多谐震荡电路如图二所示,其中Vcc为5V直流电源,Cx为被测电容,即图二所示装置。
接通电源后,Cx被充电,2管脚电压上升,当上升到2/3Vcc时,即输入达到高电频时,触发器被复位,同时555芯片内部放电三极管导通,此时U0为低电平。
之后,Cx通过R2和放电三极管放电,使2管脚电压下降。
课程设计课程《安全检测技术》课程设计题目油库安全监测系统传感器设计七(压力式液位传感器设计)电子工程学院安全工程专业安全 1001 班学号 201005040123 学生胡萧超指导老师徐竟天二○一三年六月《安全检测技术》课程设计任务书题目油库安全监测系统传感器设计七(压力式液位传感器设计)学生姓名胡萧超学号201005040123专业班级安全1001设计内容与要求课程设计主要完成某油库安全监测系统硬件设计中电容式压力传感器的选型、应用及接线等。
要求运用已学过各类传感器的知识,完成安全监测系统中传感器的原理、选型、厂家产品参数、接线等内容,将书本传感器的理论知识与厂家具体产品对应起来,使得可以真正理论联系实际。
要求熟悉相关传感器的原理与硬件结构,学会计算机监测系统硬件设计的步骤和方法,具有初步设计小型计算机安全监测系统硬件方案中传感器部分的能力。
课程设计内容及基本要求如下:1.熟悉油库工艺流程、监控目标及监控要求。
2.学会常用的各种传感器(温度、流量、压力、液位等)参数及使用,了解其工作原理。
3.课程设计中以压力式液位传感器为主,详细介绍所选液位传感器的工作原理、硬件组成、测量电路、使用时的注意事项。
详细介绍所选压力传感器的厂家产品参数、接线、特点等参数。
4.完成监测系统硬件方案设计,画出原理图。
5.课程设计时间一周,完成课程设计报告。
起止时间2013年6月17日至 2013年6月23日指导教师签名年月日系(教研室)主任签名年月日学生签名年月日目录1 绪论 (1)1.1 国内外油库现状 (1)1.2 油库的布局要求 (2)1.2.1 平面布置 (2)1.2.2 立面布置 (3)1.3 油库的主要设备 (4)1.4 油库的工艺流程及主要技术指标 (5)1.5 油库监控目标和要求 (5)1.6 系统I/O点数统计 (6)2 传感器介绍 (8)2.1 压电式传感器 (8)2.2 压力式液位传感器 (8)2.2.1 工作原理 (8)2.2.2 压力液位传感器的分类 (9)2.2.3 压力液位传感器的功能特性 (10)2.2.4 主要技术参数 (10)2.3 压力式液位传感器的选择 (10)2.3.1 液位传感器的选择技巧 (10)2.3.2 ZRN701A投入式液位传感器 (11)3 其他传感器选型 (15)3.1 热电阻温度传感器 (15)3.1.1 工作原理 (15)3.1.2 选型须知 (15)3.2 热电偶 (16)3.2.1 工作原理 (16)3.2.2 结构要求 (17)3.3 应变式压力传感器 (17)3.3.1 工作原理 (17)3.3.2 内部结构 (18)3.4 压电式压力传感器 (18)3.4.1 压电式压力传感器的特点 (18)3.4.2 压电式压力传感器的应用 (18)4 结论 (20)参考文献 (21)附录A 热电偶分度表 (22)1 绪论凡是用来接收、储存和发放原油或原油产品的企业和单位都称为油库。
一、条件和计算目标 已知:对称振子天线长为L ,半径为a ,且天线长度与波长的关系为λ5.0=L ,λ<<<<a L a ,,设1=λ,半径a=0.0000001,因此波数为πλπ2/2==k 。
目标:用Hallen 方程算出半波振子、全波振子以及不同λ/L 值的对应参数值。
求:(1)电流分布(2)E 面方向图 (二维),H 面方向图(二维),半波振子空间方向性图(三维)二、对称振子放置图图1 半波振子的电流分布半波振子天线平行于z 轴放置,在x 轴和y 轴上的分量都为零,坐标选取方式有两种形式,一般选取图1的空间放置方式。
图1给出了天线的电流分布情况,由图可知,当天线很细时,电流分布近似正弦分布。
三、Hallen 方程的解题思路()()()()21''''12,cos sin sin 'z ziz z zzi z kz G z z dz c kz c kz E k z z dz j ωμ'++=-⎰⎰ 对于中心馈电的偶极子,Hallen 方程为()22'1222('),'cos sin sin ,2LL iL L V i z G z z dz c kz c kz k z z j η+--++=<<+⎰脉冲函数展开和点选配,得到()1121,''cos sin sin ,1,2,,2nnNz in m m m m z n V I G z z dz c kz c kz k z m N j η+''=++==⋅⋅⋅∑⎰上式可以写成 1122,1,2,,N nmn m m m n Ip c q c s t m N -=++==⋅⋅⋅∑矩阵形式为⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----N N N N N N N N N N N t t t t c c I I I s q p p p s q p p p s q p p p 121211321,322,21,223221,11,11312,,,,,,,,,,,,, 四、结果与分析(1)电流分布图2 不同λ/L 电流分布图分析:由图2可知半波振子天线λ/L =0.5的电流分布最大,馈点电流最大,时辐射电阻近似等于输入电阻,因为半波振子的输入电流正好是波腹电流。
(2)E 面方向图 (二维)图5 不同λ/L 的E面方向图(1)分析:(a )θ=0时,辐射场为0。
(b )当1/<<λL (短振子)时,方向函数和方向图与电流元的近似相同。
(c )25.1/<λL 时,最大辐射方向为2max πθθ==,主瓣随λ/L 增大变窄。
1/>λL 后开始出现副瓣。
由图6可以看出。
(d )25.1/>λL 时,随λ/L 增大,主瓣变窄变小,副瓣逐渐变大;λ/L 继续增大,主瓣转为副瓣,而原副瓣变为主瓣。
(如图6所示)图6 不同λ/L 的E 面方向图(2)H 面方向图(二维)图7 未归一化的不同λ/L 的H 面方向图图8 归一化的不同 /L 的H 面方向图空间方向性图(三维)图9 半波振子的空间方向图图10 半波振子的空间剖面图附程序:clc;clear allclf;tic; %计时lambda=1;N=31;a=0.0000001;%已知天线和半径ii=1;for h=0.2:0.1:0.9L=h*lambda;len=L/N;%将线分成奇数段,注意首末两端的电流为0e0=8.854e-012;u0=4*pi*10^(-7);k=2*pi/lambda;c=3e+008;w=2*pi*c;%光速,角频率ata=sqrt(u0/e0);z(1)=-L/2+len/2;for n=2:Nz(n)=z(n-1)+len;endfor m=1:Nfor n=1:Nif (m==n)p(m,n)=log(len/a)/(2*pi)-j*k*len/4/pi;elser(m,n)=sqrt((z(m)-z(n))^2+a^2);p(m,n)=len*exp(-j*k*r(m,n))/(4*pi*r(m,n));endendendfor m=1:Nq(m)=cos(k*z(m));s(m)=sin(k*z(m));t(m)=sin(k*abs(z(m)))/(j*2*ata);endpp=p(N+1:N^2-N);pp=reshape(pp,N,N-2);mat=[pp,q',s'];%构造矩阵I=mat\t';II=[0;I(1:N-2);0];%加上两端零电流Current=abs(II);x=linspace(-L/2,L/2,N);figure(1);string=['b','g','r','y','c','k','m','r'];string1=['ko','bo','yo','co','mo','ro','go','bo'];plot(x,Current,string(ii),'linewidth',1.3);xlabel('L/\lambda'),ylabel('电流分布');grid onhold on%legend('L=0.1\lambda','L=0.2\lambda','L=0.3\lambda','L=0.4\lambda','L=0.5\lambd a','L=0.6\lambda','L=0.7\lambda','L=0.8\lambda','L=0.9\lambda','L=1\lambda') legend('L=0.1\lambda','L=0.3\lambda','L=0.5\lambda','L=0.7\lambda','L=0.9\lambda',' L=1.1\lambda','L=1.3\lambda','L=1.5\lambda')Zmn=1/I((N+1)/2);%%%%%%V=1vtheta=linspace(0,2*pi,360);for m=1:360for n=1:NF1(m,n)=II(n).*exp(j*k*z(n)*cos(m*pi/180))*len*sin(m*pi/180);endendF2=-sum(F1');F=F2/max(F2);%%%归一化figure(2);polar(theta,abs(F),string(ii));title('E面归一化方向图')view(90,-90)%legend('L=h\lambda','L=0.3\lambda','L=0.3\lambda','L=0.4\lambda','L=0.5\lambda',' L=0.6\lambda','L=0.7\lambda','L=0.8\lambda','L=0.9\lambda','L=1\lambda')legend('L=0.1\lambda','L=0.3\lambda','L=0.5\lambda','L=0.7\lambda','L=0.9\lambda','L=1.1\lambda','L=1.3\lambda','L=1.5\lambda')hold onfigure(3)kk=1;for phi=0:pi/180:2*pifor n=1:NFF(n)=II(n)*len*exp(i*k*len*n*cos(pi/2))*sin(pi/2);end;FFF(kk)=sum(FF);kk=kk+1;end;phi=0:pi/180:2*pi;polar(phi,FFF/max(abs(FFF)),string(ii));title('不同L/\lambda H-plane pattern,F({\theta},{\phi}),\theta=90');legend('L=0.1\lambda','L=0.3\lambda','L=0.5\lambda','L=0.7\lambda','L=0.9\lambda',' L=1.1\lambda','L=1.3\lambda','L=1.5\lambda')hold onfigure(4)polar(phi,FFF/max((FFF)),string(ii));title('归一化H-plane pattern,F({\theta},{\phi}),\theta=90');hold onfigure(5)mm=1;for theta=0:0.01*pi:pi;for n=1:NE(1,n)=2*pi*c*u0*len/(4*pi*1)*(exp(-i*k*1)*exp(i*k*len*n*cos(theta))*sin(theta)); endEE=E*II;G(mm)=(4*pi*1^2)/ata/abs(II((N-1)/2+1))^2/(-real(Zmn))*abs(EE)^2;mm=mm+1;end。