三相鼠笼式异步电动机设计讲解
- 格式:docx
- 大小:364.55 KB
- 文档页数:43
实验一三相鼠笼式异步电动机点动、自锁控制和正反转控制1. 通过对三相鼠笼式异步电动机点动控制和自锁控制路线的实际安装接线,掌握由电气原理图变换成安装接线图的知识。
2. 通过对三相鼠笼式异步电动机正反转控制路线的安装接线,掌握由电气原理图接成实际操作电路的方法。
3. 加深对电气控制系统各种保护、点动控制、自锁、互锁等环节的理解。
4. 学会分析、排除继电--接触控制路线故障的方法。
1. 继电─接触控制在各类生产机械中获得广泛地应用,但凡需要进行先后、上下、摆布、进退等运动的生产机械,均采用传统的典型的正、反转继电─接触控制。
交流电动机继电─接触控制电路的主要设备是交流接触器,其主要构造为:(1) 电磁系统─铁心、吸引线圈和短路环。
(2) 触头系统─主触头和辅助触头,还可按吸引线圈得电先后触头的动作状态,分动合〔常开〕、动断〔常闭〕两类。
(3) 消弧系统─在切断大电流的触头上装有灭弧罩,以迅速切断电弧。
(4) 接线端子,反作用弹簧等。
2. 在控制回路中常采用接触器的辅助触头来实现自锁和互锁控制。
〔1〕自锁。
要求接触器线圈得电后能自动保持动作后的状态,这就是自锁,通常用接触器自身的动合触头与起动按钮相并联来实现,以到达电动机的长期运行,这一动合触头称为“自锁触头〞。
〔2〕互锁。
使两个电器不能同时得电动作的控制,称为互锁控制,如为了防止正、反转两个接触器同时得电而造成三相电源短路事故,必须增设互锁控制环节。
为操作的方便,也为防止因接触器主触头长期大电流的烧蚀而偶发触头粘连后造成的三相电源短路事故,通常在具有正、反转控制的路线中采用既有接触器的动断辅助触头的电气互锁,又有复合按钮机械互锁的双重互锁的控制环节。
电气互锁○1为了防止接触器KM1 〔正转〕、 KM2 〔反转〕同时得电吸合造成三相电源短路,在KM1〔KM2〕线圈支路中串接有KM1〔KM2〕动断触头,它们保证了路线工作时KM1、KM2不会同时得电〔如图30-1〕,以到达电气互锁目的。
电工部分三相鼠笼式异步电动机正反转控制一、课程设计的目的及要求根据已有的电路图连接电路,在实验台上连接电路,最终实现让电动机转起来的要求:1掌握三相鼠笼式异步电动机正反转控制电路的工作原理、接线及操作方法。
2掌握继电器控制系统中“互锁”、“自锁”的概念及线路结构。
3学会分析、排除继电器劫持控制线路故障的方法。
4要求电动机可以正反转,由电动机原理可知,若将接至电动机的三相电源进线中的任意两根相对调,即可使电动机正反转。
二、设计原理⑴电动机的旋转方向三相异步电动机的旋转方向是取决于磁场的旋转方向,而磁场的旋转方向又取决于电源的相序,所以电源的相序决定了电动机的旋转方向。
任意改变电源的相序时,电动机的旋转方向也会随之改变。
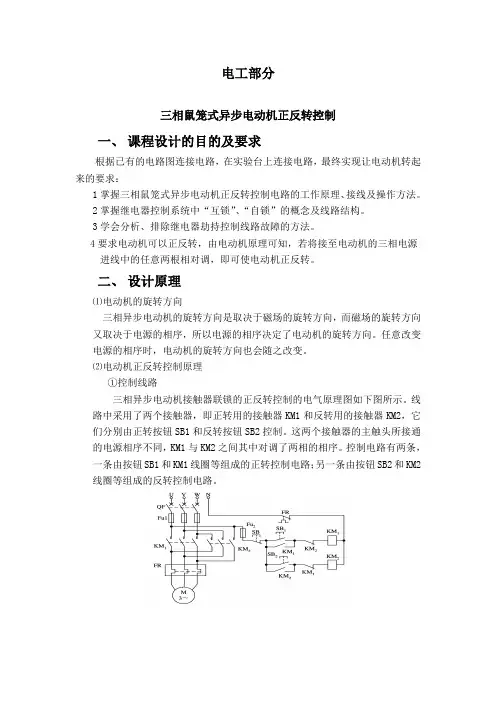
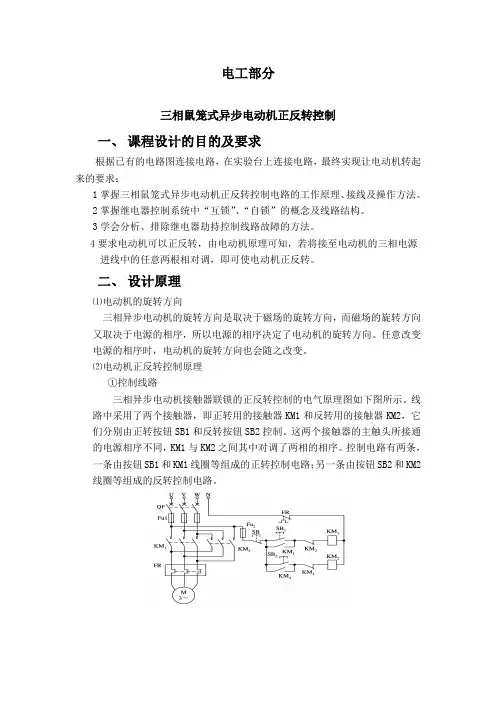
⑵电动机正反转控制原理①控制线路三相异步电动机接触器联锁的正反转控制的电气原理图如下图所示。
线路中采用了两个接触器,即正转用的接触器KM1和反转用的接触器KM2,它们分别由正转按钮SB1和反转按钮SB2控制。
这两个接触器的主触头所接通的电源相序不同,KM1与KM2之间其中对调了两相的相序。
控制电路有两条,一条由按钮SB1和KM1线圈等组成的正转控制电路;另一条由按钮SB2和KM2线圈等组成的反转控制电路。
②互锁原理接触器KM1和KM2的主触头决不允许同时闭合,否则造成两相电源短路事故。
为了保证一个接触器得电动作时,另一个接触器不能得电动作,以避免电源的相间短路,就在正转控制电路中串接了反转接触器KM2的常闭辅助触头,而在反转控制电路中串接了正转接触器KM1的常闭辅助触头。
当接触器KM1得电动作时,串在反转控制电路中的KM1的常闭触头分断,切断了反转控制电路,保证了KM1主触头闭合时,KM2的主触头不能闭合。
同样,当接触器KM2得电动作时, KM2的常闭触头分断,切断了正转控制电路,可靠地避免了两相电源短路事故的发生。
这种在一个接触器得电动作时,通过其常闭辅助触头使另一个接触器不能得电动作的作用叫联锁(或互锁)。
三相鼠笼异步电动机介绍三相鼠笼异步电动机,也称为混合式异步电动机,是一种电力驱动装置,被广泛应用于许多工业和家庭设备,如泵、风扇、制冷设备、工具和各种机器。
本文将介绍三相鼠笼异步电动机的基本原理、结构、特点以及其主要应用领域。
基本原理三相鼠笼异步电动机的工作原理是利用电机中的旋转磁场相互作用来产生转矩。
电动机的三个绕组,或称为三个相位,将其与电源连接以产生三个电流波形,每个波形都相移 120 度。
这些波形通过转子上的鼠笼形导体产生电流,从而形成一个旋转磁场,该磁场沿着电机的气隙旋转。
转子中的静磁场和旋转磁场相互作用,产生一个力矩,使电动机的转子开始旋转。
结构三相鼠笼异步电动机包括一个外部固定的定子和一个内部互相独立地旋转的转子。
定子主要由铁芯和三个附着在铁芯上的绕组组成。
绕组的数量和分布方式可以根据具体设计要求进行优化。
转子中心有一个轴承,它靠近定子一端的轴承过程中,安装有一个连续的穿孔的轴向齿槽。
特点三相鼠笼异步电动机具有以下特点:1.低成本:相对于同类别的电机,它的构造相对简单,因此造价较低。
2.易于维护:三相鼠笼异步电动机不需要常规的维护,只需要定期保养和检查以确保其在最佳工作条件下运行。
3.良好的可靠性:电动机的耐用性和可靠性可以保证其正常使用和长寿命。
4.高效率:三相鼠笼异步电动机的效率很高,从而可以提高设备的运行效率,并帮助用户节省电费。
应用领域三相鼠笼异步电动机的应用非常广泛,常见于以下几类设备:1.工业泵:水泵、离心泵、柱塞泵和真空泵等。
2.辅助设施:风扇、冷却器、空气压缩机和压缩机。
3.制冷设备:冰箱、空调和冷冻设备。
一下,三相鼠笼异步电动机是一种广泛应用于工业和家庭设备的电力驱动装置。
它具有低成本、易于维护、良好的可靠性和高效率等特点。
其适用于各种环境和应用领域,包括工业泵、辅助设施和制冷设备。

鼠笼式三相异步电动机结构一、引言鼠笼式三相异步电动机是一种常见的工业用电动机,其结构简单、可靠性高、维护方便,广泛应用于各个领域。
它采用了一种特殊的转子结构,使得电动机能够在三相交流电源的激励下产生旋转磁场,从而实现机械能的转换。
二、鼠笼转子的结构鼠笼式三相异步电动机的转子由许多平行排列的导体棒组成,这些导体棒通常是铜或铝制成。
导体棒的两端通过两个短路环连接起来,形成了一个类似于鼠笼的结构,因此被称为鼠笼转子。
这种结构简单、坚固,能够承受高电流和高转速的工作条件。
三、定子的结构鼠笼式三相异步电动机的定子由三个相互平衡的线圈组成,每个线圈都被均匀地分布在定子的周围。
这三个线圈分别连接到三相交流电源上,通过电流的流动产生旋转磁场。
定子的结构通常采用铁芯绕组,以提高磁场的强度和稳定性。
四、工作原理当三相交流电源通电时,定子中的电流会产生一个旋转磁场,这个磁场的方向和大小随着电源电压和频率的变化而变化。
而鼠笼转子中的导体棒处于这个旋转磁场中,由于导体棒本身的电阻,导体棒中会产生感应电流。
这些感应电流在导体棒中形成了一个与旋转磁场方向相反的磁场,产生了一个电磁力,使得转子开始旋转。
由于导体棒是短路的,感应电流会在导体棒之间形成环流,使得转子继续旋转。
这样,电动机就完成了能量的转换,将电能转化为机械能。
五、优点和应用鼠笼式三相异步电动机具有结构简单、可靠性高、维护方便等优点,因此被广泛应用于各个领域。
它常用于电动机驱动的机械设备,如风机、泵、压缩机等。
由于其可靠性高,即使在恶劣的工作环境下,也能够正常工作。
此外,鼠笼式三相异步电动机的启动电流较小,能够节约能源,降低电网负荷。
六、总结鼠笼式三相异步电动机是一种结构简单、可靠性高的电动机。
其通过鼠笼转子的特殊结构,利用定子中的旋转磁场产生感应电流,从而将电能转化为机械能。
由于其优点和应用广泛,鼠笼式三相异步电动机在各个领域都有着重要的地位。
我们在日常生活和工业生产中都能够看到它的身影,为我们的生活和工作提供了便利。
三相鼠笼式异步电机工作原理三相鼠笼式异步电机是目前工业和民用领域使用最为广泛的电机之一。
它适用于各种功率等级,广泛应用于机器制造、电力、交通、建筑、矿山等各个领域。
本文将介绍三相鼠笼式异步电机的工作原理。
一、三相鼠笼式异步电机基本构造三相鼠笼式异步电机的基本构造由固定部分和旋转部分组成。
其固定部分又称为定子,由铁心、绕组和端盖等组成;旋转部分又称为转子,由铁心和根据不同型号而有所不同的铝或铜向外突出的鼠笼形导条所组成。
转子可分为两类,一类是短路转子(又称鼠笼转子),另一类是抽象极转子。
二、三相鼠笼式异步电机工作原理三相鼠笼式异步电机是一种交流电动机,其工作原理是依据异步电动机的运行原理。
异步电动机的运行是通过定子上交变电磁场与转子中感应电动势作用产生的扭矩来实现的。
1. 定子产生旋转磁场三相交流电压AC在定子上的三个绕组(也称为初始绕组)间轮流通电,分别形成三个简单的旋转磁场,这三个旋转磁场相互距离相等,夹角为120度,并沿着定子的纵轴线旋转。
这个旋转磁场是由定数上的电流所产生的,定子上的电流也是由交流电压所引起的。
2. 转子中产生感应电动势由于变化的磁场,在转子中感应出一电流。
这不仅有能量损失,也会导致电机损耗。
这时电动磁通的作用在转子中生成感应电流,而感应电流在旋转磁场的作用下将受到些方向和大小变化的力的作用,使它绕着定子的纵轴线旋转。
3. 定子和转子的同步速度不同定子两个极间的电磁场总是与转子上的导条彼此交错。
当变化的磁场转动时,导条内的电流也会随之偏转。
由于旋转磁场的旋转速度不同于转子的旋转速度,导致在转子中形成了电流的旋转磁场,与定子电磁场方向相对。
在理论上,如果转子的旋转速度与电磁场的旋转速度相同,那么就可以获得最大扭矩。
4. 转子受到的力和扭矩在实际情况中,转子的旋转速度比电磁场的旋转速度稍慢一些,导致效率稍微降低。
由于定子和转子之间的磁场之间的相对滞后,产生了导电节团中的电流旋转磁场,电机的转动根据力矩计算,可得到最大扭矩的产生时刻,此时转子的旋转速度与电磁场的旋转速度相同。
杭州职业技术学院《电器控制与PLC》实验报告机电工程系电气教研室2005年4月实验一三相鼠笼式异步电动机的点动和自锁控制线路一、实验内容继电接触控制系统对中小功率笼式异步机进行直接起动,其控制线路由继电器、接触器、按钮等有触头电器组成。
某些生产机械在安装或维修后常常需要所谓“点动”控制。
除点动外,电机更多地工作于连续工作状态。
1、本次实验的内容:1)、三相鼠笼式异步电机点动控制线路2)、三相鼠笼式异步电机单方向连续旋转控制线路3)、三相鼠笼式异步电机点动及单方向连续旋转复合控制线路2、实验原理图1)三相鼠笼式异步电机点动控制线路的原理图2)三相鼠笼式异步电机单方向连续工作控制线路的原理图3)三相鼠笼式异步电机点动及单方向连续工作复合控制线路的原理图二、实验目的1、熟悉三相鼠笼式异步电机单方向起动停止和点动控制线路中各电器元件的使用方法及其在线路中所起的作用。
2、掌握三相鼠笼式异步电机单方向起动停止和点动控制线路的工作原理、接线方法、调试及故障排除技能。
三、实验步骤1)、三相鼠笼式异步电机点动控制2)、三相鼠笼式异步电机单方向连续旋转控制3)、三相鼠笼式异步电机点动及单方向连续旋转复合控制四、思考题1、在单向连续工作控制线路中,若自锁常开触头错接成常闭触头,会发生什么现象?2、在点动及单向连续工作复合控制线路中,说明按下按钮SB3时电机为何是点动工作?3、实验线路中是如何实现短路保护、过载保护、欠压保护与失压保护的?实验二三相鼠笼式异步电动机可逆旋转控制线路一、实验内容在生产实践中,常常需要生产机械的运动部件能在一定范围内自动往复运动,此时往往要求电动机能正转、反转可逆运行。
1、本次实验的内容:三相鼠笼式异步机“正←→反”可逆控制线路2、实验原理图三相鼠笼式异步电机“正←→反”可逆控制线路的原理图二、实验目的1、掌握三相笼式异步机可逆运行控制线路的工作原理、接线方式及操作方法。
2、掌握机械及电气互锁的连接方法及其在控制线路中所起的作用。
三相鼠笼式异步电动机电磁计算及其优化引言三相鼠笼式异步电动机是一种常见的工业电机,广泛应用于各个行业中。
在电磁计算和优化方面,对三相鼠笼式异步电动机的性能进行分析和优化有助于提高其工作效率和降低能源消耗。
本文将介绍三相鼠笼式异步电动机的电磁计算方法,并讨论其优化策略。
电动机的电磁计算磁路计算在进行电动机的电磁计算之前,首先需要进行磁路计算。
磁路计算主要包括确定电机的磁路参数和磁路中的磁通分布。
通过磁路计算,可以得到电机的磁路阻抗和磁通链路。
定子电磁计算定子电磁计算主要包括定子绕组的计算和定子铁心的计算。
定子绕组的计算是根据电机的设计参数和电机的功率因数来确定绕组的匝数和截面积。
定子铁心的计算是通过磁路计算得到的磁通分布来确定定子铁心的形状和尺寸。
转子电磁计算转子电磁计算主要包括转子导体的计算和转子铁心的计算。
转子导体的计算是根据电机的设计参数和电机的功率因数来确定导体的形状和尺寸。
转子铁心的计算是通过磁路计算得到的磁通分布来确定转子铁心的形状和尺寸。
励磁计算励磁计算主要是计算电机的励磁特性,包括定子励磁电流和转子励磁电流。
通过励磁计算,可以得到电机的励磁电流和励磁特性曲线。
电动机的优化策略材料优化优化电动机的材料可以降低电机的能量损耗和提高电机的效率。
通过选择合适的材料,可以减少电机的磁路阻抗和铜损耗,从而提高电机的效率。
结构优化结构优化主要是通过改变电机的结构来提高电机的性能。
通过优化电机的定子绕组和转子导体的形状和尺寸,可以减少电机的铜损耗和焦耳损耗,从而提高电机的效率。
控制优化控制优化主要是通过改变电机的控制策略来提高电机的性能。
通过优化电机的启动、运行和停止过程,可以降低电机的能量损耗和提高电机的效率。
结论通过电磁计算和优化策略,可以提高三相鼠笼式异步电动机的工作效率和节能性能。
在电磁计算方面,磁路计算、定子电磁计算、转子电磁计算和励磁计算是关键步骤。
在优化策略方面,材料优化、结构优化和控制优化可以显著提高电动机的性能。
实验三三相鼠笼异步电动机实验【实验名称】三相鼠笼异步电动机实验【实验目的】1.掌握三相异步电机的负载试验的方法。
2.用直接负载法测取三相鼠笼异步电动机的工作特性。
3.测定三相鼠笼型异步电动机的参数【预习要点】1.异步电动机的工作特性指哪些特性?2.异步电动机的等效电路有哪些参数?其物理意义是什么?3.工作特性和参数的测定方法。
【实验项目】1.测量定子绕组的冷态电阻。
2.判定定子绕组的首末端3.测取三相异步电动机的运行特性【实验设备及仪器】【实验方法及步骤】1.测量定子绕组的冷态直流电阻。
准备:将电机在室内放置一段时间,用温度计测量电机绕组端部或铁芯的温度。
当所测温度与冷动介质温度之差不超过2K 时,即为实际冷态。
记录此时的温度和测量定子绕组的直流电阻,此阻值即为冷态直流电阻。
(这里默认室温20℃即为实际冷态)测量线路如图3-1。
其中:1S ,2S :双掷开关,位于NMEL-05R :四只900Ω和900Ω联(NMEL-03)。
A 、V 表,或采用NMEL-06屏上。
量程的选择:为50mA 时电压约为2.5伏,所以直流电压表量程用20V 档,实验开始前,合上开关1S ,断开开关2S ,调节电阻R 至最大(3600Ω)。
分别合上绿色“闭合”按钮开关和220V 直流可调电源的船形开关,按下复位按钮,调节直流可调电源及可调电阻R ,使试验电机电流不超过电机额定电流的10%,以防止因试验电流过大而引起绕组的温度上升,读取电流值,再接通开关2S 读取电压值。
读完后,先打开开关S2,再打开开关S1。
调节R 使A 表分别为50mA ,40mA ,30mA 测取三次,取其平均值,测量定子三相绕组的电阻值,记录于表3-1中。
表3-1 室温℃绕组I 绕组Ⅱ绕组ⅢI(mA)U(V)R(Ω)注意事项:(1)在测量时,电动机的转子须静止不动。
(2)测量通电时间不应超过1分钟。
2.判定定子绕组的首未端先用万用表测出各相绕组的两个线端,将其中的任意二相绕组串联,如图3-2所示。
电机与拖动控制课程设计报告题目三相式鼠笼异步电动机的工作特性系别自动化系专业名称自动化目录摘要--------------------------------------------------------------------3前言--------------------------------------------------------------------4 实验项目-------------------------------------------------------------53.1 实验设备-----------------------------------------------------53.2 工作原理------------------------------------------------------73.3 工作特性-----------------------------------------------------94.1课程设计所用的基本知识-- - -------- --------------------------95.1空载实验------ -------------------------------------------10相鼠笼交流电动机空载测试-----------------------------10 实物连线------------------------------------------------------11 5.2 负载试验--- - -------------------------------------------------15 实验总结- -----------------------------------------------------------19 心得体会- -----------------------------------------------------------20 参考文献--- - -------------------------------------------------------21三相鼠笼异步电动机的工作特性摘要三相异步电动机。
实验八 三相鼠笼式异步电动机及正、反转控制一、实验目的1.了解三相鼠笼式异步电动机的结构及铭牌数据的含义。
2. 了解交流接触器、热继电器、按钮等元件的结构、动作原理及其使用方法。
3.学习异步电动机正、反转控制线路的接线和调试。
4. 学会使用兆欧表、转速表、钳形电流表。
二、实验原理简述三相鼠笼式电动机主要由定子和转子两部分组成。
定子绕组是三相对称绕组,有六个出线端1D 、2D 、3D 、4D 、5D 、6D 分别接在机座线盒上。
其中D 1、D 4为一相定子绕组的首端和末端,D 2、D 5为另一相定子绕组的首末端,又D 3、D 6为一相定子绕组的首末端,如图1-8-2所示。
根据电动机的铭牌数据和三相电源电压确定连接成星形(Y 形)还是接成三角形(Δ形)。
具体接法如图l-8-1所示。
电动机转子绕组如同一个圆柱型的笼子,在小容量电动机中,转子绕组以及作冷却用的风扇叶通常用铝铸成一体,以简化制造工艺。
(a) Y 接法 (b ) △接法1-8-1 三相鼠笼式电动机的接法三相鼠笼式异步电动机的主要额定值都标注在电动机的铭牌上。
为了电动机能安全可靠地运行,除了保证电动机正常工作所需的一切外部条件外,电动机内部绕组间和绕组与机壳间还必须有良好的绝缘。
因此,使用电动机之前和使用期间都应作绝缘电阻的检测。
测试电动机绝缘电阻的接线图如图l-8-2所示。
通常对额定电压500V 以下的电动机采用500V 兆欧表进行测试。
三相380V 电动机的各种绝缘电阻都必须大于0.5兆欧方可使用。
三相鼠笼式电动机的起动方法分直接起动和降压起动两种。
直接起动的电流大,适用于小容量电动机。
降压起动能减小起动电流,但起动转矩相应减小,适用于容量较大及起动转矩要求不大的场合。
图1-8-2电动机绝缘电阻的测量以继电器、接触器为主体的继电接触控制电路是目前仍广泛应用的电动机控制电路。
异步电动机的正、反转控制电路在不少生产机械中得到了广泛的应用。
交流接触器是一种受电磁作用而动作的电器,其主触头容量大,用于电动机主电路以实现三相电压的加入。
三相鼠笼式异步电动机实验报告三相鼠笼式异步电动机实验报告引言:电动机是现代工业中不可或缺的设备之一,而异步电动机作为最常见的一种电动机类型,广泛应用于各个领域。
本次实验旨在通过对三相鼠笼式异步电动机的实验研究,深入了解其原理和性能特点。
一、实验目的本次实验的主要目的有三个方面:1.了解三相鼠笼式异步电动机的基本原理和结构;2.掌握电动机的运行特性和性能参数的测量方法;3.通过实验验证电动机的运行特性与理论分析的一致性。
二、实验原理1.三相鼠笼式异步电动机的结构和工作原理三相鼠笼式异步电动机是由定子和转子两部分组成。
定子上的三相绕组通过外接三相交流电源形成旋转磁场,转子上的鼠笼导体受到磁场的作用而感应出电动势,从而产生转矩,使电动机转动。
2.电动机的运行特性和性能参数电动机的运行特性主要包括转速-负载特性、转矩-负载特性和效率-负载特性。
性能参数包括额定功率、额定转速、额定电压、额定电流、功率因数和效率等。
三、实验步骤1.准备工作将三相鼠笼式异步电动机与电源连接,确保电源电压和频率与电动机额定电压和频率一致。
2.测量电动机的空载特性将电动机启动,使其处于空载状态,通过电流表和电压表测量电动机的电流和电压,计算出功率因数。
3.测量电动机的负载特性逐步增加负载,测量电动机在不同负载下的电流、电压和功率因数,并计算出转速和转矩。
4.计算电动机的效率根据测量结果,计算出电动机在不同负载下的效率,并绘制效率-负载特性曲线。
四、实验结果与分析通过实验测得的数据,我们可以得出以下结论:1.电动机的空载电流较小,功率因数较低;2.随着负载的增加,电动机的电流和功率因数逐渐增大,转速和转矩逐渐降低;3.电动机的效率在额定负载附近最高,随着负载的增加和减小而降低。
五、实验总结通过本次实验,我们深入了解了三相鼠笼式异步电动机的原理和性能特点。
实验结果与理论分析基本一致,验证了电动机的运行特性与理论模型的一致性。
同时,我们也发现了电动机在不同负载下的效率变化规律,为电动机的选型和应用提供了参考。
「三相鼠笼式异步电动机设计实例」鼠笼式异步电动机是一种常见的三相感应电动机,由于其结构简单、耐久可靠、成本较低等特点,在工业领域得到了广泛应用。
本文将以三相鼠笼式异步电动机的设计实例为主题,详细介绍其设计原理和步骤。
首先,我们需要确定设计的目标和参数。
假设我们要设计一台额定功率为20kW、三相380V、50Hz的鼠笼式异步电动机。
根据这些参数,我们可以开始设计。
第一步是确定定子绕组的电气参数。
根据所给的电压和功率,可以计算出对应的电流值。
假设我们要求电流密度为6 A/mm²,根据功率和电压得到额定电流值为40 A,根据定子槽数的设计要求,可以计算出定子绕组的导体截面积。
第二步是计算定子槽数和转子槽数。
一般来说,定子槽数和转子槽数的比值在2.5~3之间。
根据这个比值,我们可以计算出定子和转子的槽数。
第三步是确定空载电流和满载电流的比值。
一般来说,空载电流和满载电流的比值范围为1.4~1.8、根据给定的功率和额定电流值,可以计算出空载电流和满载电流。
第四步是确定磁链密度和定子绕组的电磁参数。
磁链密度是电机设计中的一个重要参数,它会影响电机的输出功率、效率和性能。
根据给定的功率和电压,可以计算出磁链密度。
然后,根据导体截面积和定子槽数,可以计算出定子绕组的电阻、电感和导纳。
第五步是确定转子电阻和转子槽数。
转子电阻是电机设计中的另一个重要参数,它会影响电机的起动性能和负载特性。
根据给定的功率和电压,可以计算出转子电阻。
然后,根据转子电阻和转子槽数,可以计算出转子的电感和电纳。
第六步是根据电磁参数,计算出电机的等效电路参数。
这些参数包括定子和转子的电阻、电感和导纳。
通过电机的等效电路参数可以进行电机的性能分析和计算。
第七步是进行电机的磁路设计。
根据所给的电压和功率,可以计算出磁路的长度、磁链密度和磁通。
根据磁路的长度和磁链密度,可以确定磁路的尺寸和磁通。
第八步是进行电机的槽设计。
根据定子和转子的槽数,可以确定槽的尺寸和形状。
三、本课题研究内容:中小型三相感应电动机电磁计算程序是根据技术条件或技术任务书(技术建议书)的规定,参照生产实践经验,通过计算和方案比较,来确定与所设计电机电磁性能有关的尺寸和数据,选定有关材料,并核算其电磁性能。
其主要内容包括以下四个步骤,分别是:a)额定数据及主要尺寸的计算;b)磁路计算;c)参数计算;d)起动计算。
四、本课题研究方案:在核算原方案的基础上,进一步设计三个方案,其中多个方案亦有不同的要求,从而找出最佳方案:方案一:节省材料,将铁芯缩短5毫米,尽量减少定子绕组用铜量、用硅铜量、用铁量和转自绕组用铝量。
方案二:提高性能,提高效率、减少起动电流、增大起动转矩和最大转矩。
方案三:既节省又提高性能。
目录摘要........................................... 错误!未定义书签。
ABSTRACT .......................................... 错误!未定义书签。
绪论........................................... 错误!未定义书签。
第1章异步电机概念............................... 错误!未定义书签。
1.1异步电机的类型、特点和用途................... 错误!未定义书签。
1.2异步电机的发展趋势........................... 错误!未定义书签。
第2章三相异步电动机的基本结构和工作原理.. (1)2.1三相异步电动机的基本结构 (1)2.2三相异步电动机的铭牌数据与主要系列 (2)2.3三相异步电动机的工作原理 (4)2.4三相异步电动机的机械特性和工作特性 (5)第3章电机设计基本理论 (6)3.1电机制造与设计的概况 (6)3.2电磁设计 (6)第4章毕业设计手算程序及优化方案 (9)4.1手算程序 (9)4.2优化方案 (28)结论 (32)参考文献 (33)附录I.CAD图 (35)第2章三相异步电动机的基本结构和工作原理2.1 三相异步电动机的基本结构三相异步电动机主要是由定子和转子两大部分组成,转子有鼠笼型及绕线型转子两种。
电机设计计算实例(三相感应电机)(一)额定数据及主要尺寸 1.输出功率2P 2P =15kw 2P =15kw2.外施相电压1U 1U =380V 1U =380V 3.功电流KW I113210U m P I KW⋅⋅==380310153⨯⨯=13.1579A KW I =13.1579A4.效率η' η'=0.89η'=.895.功率因数ϕ'cos ϕ'cos =0.81ϕ'cos =0.816.极数p p =6p =67.定子槽数1Q 1Q =54 1Q =54 转子槽数2Q 2Q =44 2Q =44 8.定子每极槽数p Q Q P 11==654=9 1P Q =9转子每极槽数p Q Q P 22==322644= 2P Q =3229.定转子冲片尺寸见图10.极距P τp D i P 1⋅=πτ=620514159.3⨯=107.3377 P τ=107.3377mm11.定子齿距1t111Q D t i ⋅=π=5420514159.3⨯=11.926411t =11.92641mm12.转子齿距2t 222Q D t ⋅=π=441.20414159.3⨯=14.57272t =14.5727mm13.节距y y =8y =814.转子斜槽宽SK b SK b =11.92641SK b 11.92641mm15.每槽导体数1Z 1Z =34 1Z =34 16.每相串联导体数1φZ11111a m Z Q Z ⋅⋅=φ=233454⨯⨯=3061φZ =306式中:1a =217.绕组线规(估算)8.107.5208189.01579.13cos 111111=⨯⨯='⋅'=''∆⋅'='⋅'ϕηKW I I a I S N式中:导线并绕根数·截面积'⋅'11S N查表 取'⋅'11S N =1⨯1.5'⋅'11S N=1⨯1.5定子电流初步估算值ϕη'⋅'='cos I I KW1=08189.01579.13⨯=18.252A'1I =18.252A定子电流密度'∆1 '∆1=5.07'∆1=5.0718.槽满率(1)槽面积22221R h h b R S S S S π+⎪⎭⎫ ⎝⎛-'+== ()28.314159.325.1825.58.322⨯+-+⨯=130.7573mm 2S S=130.7573mm 2(2)槽绝缘占面积7133.21)5.58.3)214159.3(25.18(35.0221=+⨯++⨯=⎪⎭⎫ ⎝⎛+++'=S S i i b R R h C S π i S =21.7133mm(3)槽有效面积 i S e S S S -==130.7573-21.7133=109.044 mm 2e S =109.044 mm 2(4)槽满率7784.0044.10958.13412211=⨯⨯=⋅⋅=e f S d Z N Sf S =0.7784绝缘厚度i C i C =0.35mmi C =0.35mm导体绝缘后外径d d =1.58mm d =1.58mm槽契厚度h h =2mmh =2mm19.铁心长l铁心有效长 无径向通风道g l l eff 2+==200+2⨯0.45=200.9mmeff l =200.9mm净铁心长无径向通风道l K l Fe Fe ⋅==0.92⨯200=184mmFe l =184mm铁心压装系数Fe l Fe K =0.92Fe K =0.9220.绕组系数111p d dp K K K ⋅==0.956⨯0.9848=0.945 1dp K =0.945(1)分布系数2sin2sin 111αα⋅⎪⎭⎫ ⎝⎛⋅=q q K d 查表取0.956 1d K =0.956式中:36354111=⨯=⋅=p m Q q 1q =33491.054614159.31=⨯==Q p πα(2)短距系数 ()9848.0)9098sin(90sin 1=⨯=⋅=o p K β1p K =0.9848式中:981==p Q y β98=β 21.每相有效串联导体数 1111dp dp K Z K Z ⋅=⋅φφ=306⨯0.945=289.171φZ =289.17(二)磁路计算22.每极磁通612.11069945.03065022.21051.35522.21081181=⨯⨯⨯⨯=⋅⋅⋅=dp K Z f E φφ φ612.11069=式中: 111U E L ⎪⎭⎫ ⎝⎛'-=ε=0.935⨯380=355.311E =355.31V23.齿部截面积(1)定子111P Fe T T Q l b S ⋅⋅==6.58169⨯184⨯9=10899.281T S =10899.28(2)转子222P Fe T T Q l b S ⋅⋅==8.881⨯184⨯22/3=11983.432T S =11983.4324.轭部截面积(1)定子 Fe C C l h S ⋅'=11=20.66667⨯184=3802.6671C S =3802.667式中:定子轭部磁路计算高度'1C h 圆底槽:66667.208.331)8.38.05.18(2205290312111=⨯+++--=+--='Rh D D h S i C'1C h =20.66667(2)转子Fe C C l h S ⋅'=22=30.05⨯184=6449.22C S =6449.2转子轭部磁路计算高度'2C h 平底槽05.35322711.2043222222=--=---='K R i C d h D D h'2C h =35.05mm25.空气隙面积 eff p g l S ⋅=τ=107.3377⨯200.9=21564.14g S =21564.1426.波幅系数φφ平均最大=S F =1.459833S F =1.45983327.定子齿磁密482647.128.10899612.11069459833.111===T ST S F B φ1T B =1.48264728.转子齿磁密3485.152.11983612.11069459833.122===T ST S F B φ2T B =1.348529.定子轭磁密4555.1667.3802612.11069212111=⋅=⋅=C C S B φ 1C B =1.455530.转子轭磁密858216.02.6449612.11069212122=⋅=⋅=C C S B φ 2C B =0.85821631.空气隙磁密7493831.014.21564612.11069459833.1===g Sg S F B φg B =0.749383132.查附录Vl 得1T at 2T at 1C at 2C at33.齿部磁路计算长度 定子圆底槽2S 1S 1T h h h +='+R 31=18.5+31⨯3.8=19.76667 '1T h =19.76667转子平底槽212R R T h h h +='=12.5'2T h =12.5mm34.轭部磁路计算长度定子=⎪⎭⎫ ⎝⎛'-='ph D l C C 2111π()1266667.2029014159.3-=70.511'1C l =70.511mm转子502.2712)05.3570(14159.32222=+=⎪⎭⎫ ⎝⎛'-='ph D l C i C π'2C l =27.50235.有效气隙长度21C C e K K g g ⋅⋅==0.45⨯1.287⨯1.0258=0.594e g =0.594式中: 定、转子卡氏系数1C K 、2C K()()287.15.3)5.375.045.04.4(92641.11)5.375.045.04.4(92641.1175.04.475.04.4221=-⨯+⨯⨯+⨯=-++=oo o C b b g t b g t K 1C K =1.287半闭口槽和半开口槽()()0258.11)175.045.04.4(5727.14)175.045.04.4(5727.1475.04.475.04.4222=-⨯+⨯⨯+⨯=-++=oo o C b b g t b g t K 2C K =1.0258式中: 齿距tt 1=11.92644mm t 2=14.5727mm槽口宽o bo b 1=3.5mm o b 2=1mm36.齿部所需安匝定子'⋅=1T 1T 1T h at AT =18.35322⨯1.976667=36.27821T AT =36.2782转子'⋅=2T 2T 2T h at AT=10.41563⨯1.25+25.99844⨯1.9 =62.416582T AT =62.4165837.轭部所需安匝定子'⋅⋅=1C 1C 11C l at C AT=0.3619942⨯15.93694⨯7.051125 =40.648491C AT =40.64849轭部磁路长度校正系数1C1C =0.3619942 1C =0.3619942转子'⋅⋅=2C 2C 22C l at C AT=0.7⨯2.806553⨯2.7502 =5.4032C AT =5.403校正系数2C 2C =0.72C =0.7 38.空气隙所需安匝e g g g B AT ⋅=8.0=0.8⨯749.383⨯0.594=356.11g AT =356.1139.饱和系数2771.111.35611.35641658.622782.3621=++=++=ggT T T AT AT AT AT FT F =1.277140.总安匝g C C T T AT AT AT AT AT AT ++++=2121=36.2782+62.41658+356.11+40.67849+5.403 =500.886AT =500.86641.满载磁化电流11122.2dp m K Z m p AT I φ⋅⋅==945.030636886.50022.2⨯⨯⨯⨯=7.69m I =7.69A42.满载磁化电流标么值KW m m I I i ==1579.1369.7=0.58444 m i =0.5844443.激磁电抗m m i x 1==58444.01=1.711 m x =1.71(三)参数计算 44.线圈平均半匝长(估算)双层线圈 S B Z C L l 2+==240+2⨯61.655 =Z l 363.31 式中: ()12d l L B +=直线部分长=240+2⨯20=240B L =240mmατcos 2YS C ==655.618666.028606.106=⨯S C =61.655()[]βπτpR h h h D S S SO i Y ++++=2112866.106986)8.38.173205(14157.3=⨯+++=Y τ=106.866mm式中: d1=20mmd1=20mm 8666.0499.01sin 1cos 22=-=-=αα111222sin T S S b R b Rb +++=α499.0576.628.325.58.325.5=⨯+⨯+⨯+=45.双层线圈端部轴向投影长 αsin ⋅=S d C f =61.655⨯0.499=30.7658=d f 30.7658mm47.漏抗系数()52121121063.2⋅⋅⋅⋅=U p K Z l P f C dp eff x φ=03825.0103806)945.0306(09.20155063.2522=⨯⨯⨯⨯⨯⨯⨯48.定子槽单位漏磁导11111L L U U S K K λλλ⋅+⋅==0.3842⨯0.91667+0.9375⨯1.237789 =1.52161S λ=1.5216式中: =1U K 0.916667 =1U K 0.916667=1L K 0.9375 =1L K 0.9375=1U λ0.3842 =1U λ0.384249.定子槽漏抗x dp eff S S C Q K l p m l x 1211111⋅⋅⋅⋅⋅=λ=Cx 54945.09.2005126.1632002⨯⨯⨯⨯⨯ =0.5620x C1S x =0.5620x C式中:无径向通风道时l l =1=200mm1l =200mm 50.定子谐波漏抗x Tdp e pd C F K S gm x ⋅⎪⎪⎭⎫ ⎝⎛⋅⋅=∑21211πτ =277.1945.010026714.1594.014159.33377.1073222⨯⨯⨯⎪⎭⎫ ⎝⎛⨯⨯- =0.4945x C1d x=0.4945x C式中: 210026714.1-⨯=∑S51.定子端部漏抗()x effd e C l f d x 5.02.111+==()Cx 9.2007658.305.0202.1⨯+1e x =0.2113x C=0.2113x C52.定子漏抗1111e d S x x x x ++==(0.562+0.4945+0.2113) x C =1.2678x C =0.0484931x =0.04849353.转子槽单位漏磁导 222L U S λλλ+==0.5+3.341641=3.841641 2S λ=3.841641 式中: =2U λ0.5=2U λ0.5=2L λ 3.341641 =2L λ 3.34164154.转子槽漏抗x eff S S C Q l p m l x 22122⋅⋅⋅⋅=λ=Cx 449.200841641.363200⨯⨯⨯⨯=1.56454x C2S x=1.56454x C55.x T e 2p 12d C F R gm x ∑⎪⎪⎭⎫ ⎝⎛⋅⋅=πτ =Cx 277.10153888.0594.014159.33377.10732⎪⎭⎫⎝⎛⨯⨯ =0.6619x C2d x =0.6619x C式中:∑=R 0.01538856.转子端部漏抗x Reff 2e C p D l 757.0x ⋅==Cx 9.200156757.0⨯ =0.098x C2e x =0.098x C=R D 156mm57.转子斜槽漏抗2d 22SKSK x tb 5.0x ⎪⎪⎭⎫ ⎝⎛=Cx 6619.05727.1492641.115.02⋅⎪⎭⎫ ⎝⎛==0.2216x CSK x =0.2216x C58.转子漏抗SK e d S x x x x x +++=2222 2x =0.0974=(1.56454+0.6619+0.098+0.2216) x C =0.097459.总漏抗 21x x x +==0.048493+0.0974=0.1459x =0.1459 60.定子相电阻100N S a Z l R 1111z 1⋅⋅⋅⋅⋅=φρΩ68264.01001767.12306331.360217.0=⨯⨯⨯⨯⨯=1R Ω68264.0=61.定子相电阻标么值 1KW 11U I R r = 023637.03801579.1368264.0=⨯= 1r 023637.0=62.有效材料51111Z Cu 10N S Q Z l C G -⋅⋅⋅⋅⋅⋅⋅=γ=1.05⨯36.331⨯54⨯34⨯1.767⨯1⨯8.9⨯510- =11.015KgCu G =11.015Kg()321108.7-⋅⋅+⋅⋅=δD l K G Fe Fe=0.92⨯0.2⨯290⨯290⨯7.8⨯0.001 =120.7Kg式中: C=1.05γ=8.91S =1.7672mm 1S =1.7672mm式中: Fe K =0.92δ=0.5mmδ=0.5mm63.转子电阻导条电阻⎪⎪⎭⎫ ⎝⎛⋅⋅⋅=2Q S l K K R B B B B B ρ⎪⎭⎫⎝⎛⨯⨯⨯=447.1070434.02404.10858.25 =0.478B R =0.478Ω端环电阻⎪⎪⎭⎫⎝⎛⋅⋅⋅⋅=R 2R R RSp D 2K R πρ ⎪⎭⎫⎝⎛⨯⨯⨯⨯=4303614159.30434.06.1520858.25=0.06985R R =0.06985Ω式中:()4211110dp K Z m K φ=()0858.2510094530634=⨯=B K =1.04 B K =1.04 转子导条面积 B S =107.7 B S =107.7 端环截面积R S =430R S =430转子导条或端环的电阻系数B ρ=0.0434,R ρ=0.0434导条电阻标么值1U I R r KW BB ==0.4783801579.13=0.01655 B r =0.01655端环电阻标么值1U I R r KW RR ==0.069853801579.13=0.00242 R r =0.00242转子电阻标么值 R B r r r +=2=0.01655+0.00242=0.01897 2r =0.01897 64.满载电流有功部分η'=1P i =117585.189478.01= P i =1.11758565.满载电抗电流部分()()[]()()19266.0117585.11459.002834.11115785.11459.002834.112222=⨯⨯+⨯⨯=⋅⋅+⋅⋅=P m P m s i x K i x K isi =0.19266式中:11x i K m m ⋅+==1+0.048493⨯0.58444=1.02834m K =1.0283466.满载电流无功部分 x m R i i i +==0.19266+0.58444=0.7771 R i =0.777167.满载电势()1111x i r i R P L ⋅+⋅-=-ε=1-(1.117585⨯0.023637+0.7771⨯0.048493) =0.9359L ε-1=0.935968.空载电势1011x i m ⋅-=-ε=1-0.58444⨯0.02834=0.9716601ε-=0.9716669.空载定子齿磁密101011T L T B B εε--==9359.097166.0 =1.0382⨯1.482647=1.5392810T B =1.5392870.空载转子齿磁密202011T LT B B εε--==1.0382⨯1.3485 =1.400020T B =1.400071.空载定子轭磁密101011C LC B B εε--==1.0382⨯1.4555=1.5111 10C B =1.511172.空载转子轭磁密202011C LC B B εε--==1.0382⨯0.858216=0.891 20C B =0.89173.空载气隙磁密g Lg B B εε--=1100=1.0382⨯.7493831=0.778 0g B =0.77874.空载定子齿安匝 '⋅=11010T T T h at AT =25⨯1.976667=49.42 10T AT =49.42 75.空载转子齿安匝'⋅=22020T T T h at AT=12.6⨯1.25+38.5⨯1.9=88.920T AT =88.976.空载定子轭安匝'⋅⋅=1C 10C 110C l at C AT=0.4⨯21.2⨯7.0511=59.797210C AT =59.797277.空载转子轭安匝'⋅⋅=2C 20C 220C l at C AT =0.7⨯2.4⨯2.7502=0.7⨯6.6=4.6220C AT =4.6278.空载空气隙安匝 0g e 0g B g 8.0AT ⋅==0.8⨯778⨯0.594=369.70g AT =369.779.空载总安匝0g 20C 10C 20T 10T 0AT AT AT AT AT AT ++++==49.42+88.9+59.7972+4.62+369.7 =572.43720AT =572.437280.空载磁化电流789.8945.0306364372.57222.2K Z m p AT 22.2I 1dp 1100m =⨯⨯⨯⨯=⋅⋅=φ0m I 789.8= A81.定子电流标么值3612.1117585.17771.0i i i 222R 2P 1=+=+= 1i =1.3612定子电流实际值 k w 11I i I ⋅==1.3612⨯13.1579=17.911I =17.91A82.定子电流密度11111S N a I ⋅⋅=∆=767.11291.17⨯⨯=5.06761∆=5.067683.线负荷1i 1111D I Z m A ⋅⋅⋅=πφ529.2520514159.391.173063=⨯⨯⨯=1A 529.25=84.转子电流标么值2x 2P 2i i i +==13406.1117585.119266.022=+2i 13406.1=转子电流实际值21dp 11KW22Q K Z m I i I ⋅⋅⋅=ϕ44945.030631579.1313406.1⨯⨯⨯⨯==294.22I =294.2端环电流实际值pQ I I R ⋅=π227835.686614159.3442.294=⨯⨯=R I =7835.68685.转子电流密度 导条密度 7.1072.2942==∆B B S I =2.73166 B ∆=2.73166端环密度R R R S I =∆=4307.686=1.59698 R ∆=1.5969886.定子铝损耗 1211r i p Al ⋅==1.85286⨯0.023637=0.043796 1Al p =0.0437987.转子铝损耗321110⋅⋅=P p P Al Al =0.⨯=656.85W1Al P =656.85w. 2222r i p Al ⋅==1.286⨯0.01897=0.0244 2Al p =0.0244322210⋅⋅=P p P Al Al =0.0244⨯15000=366W2Al P =366w88.附加损耗3210⋅=P P P SS 参考实测值取0.01467S P =0.0146789.机械损耗3221065.5⎪⎭⎫⎝⎛⎪⎪⎭⎫ ⎝⎛=D p P fw 参考实测值取130Wfw P =130w机械损耗标么值3210⋅=P P P fw fw =15000130=0.00867fw P =0.0086790.定子铁耗(1) 定子齿体积'⋅⋅=111T T T h S p V =6⨯10899.28⨯19.76667=12926551T V =1292655(2) 定子轭体积'⋅⋅=1112C C C h S p V =2⨯6⨯3802.667⨯70.511=32175671C V =3217567(3) 损耗系数 1T p 1C p(4)定子齿损耗 1T 1T 1T V p P ⋅==54.11663 1T P =54.11663(5)定子轭损耗 1C 1C 1C V p P ⋅==130.06641C P =130.0664(6)总铁耗1C 21T 1Fe P k P k P ⋅+⋅= =54.11663⨯2.5+130.0664⨯2Fe P =395.442w=395.442铁耗校正系数 1k =2.5 2k =2铁耗标么值32FeFe10P P P ⋅==15000442.395=0.02636 Fe P =0.0263691.总损耗标么值fw S Fe 2Al 1Al P P P P P P ++++=∑=0.00867+0.043796+0.0244+0.01467+0.02636 =0.117896∑P =0.11789692.输入功率 ∑+=P P 11=1.1178961P =1.11789693. 总损耗比∑∑=1P P p =117896.1117896.0=0.10546∑=10546.0p94.效率 ∑-=p 1η=1-0.10546=0.89454η=0.8945495.功率因数ηϕ⋅=11cos i =89454.03612.11⨯=0.82125ϕcos =0.8212596.转差率()008671.000361.001467.000867.002636.00244.010244.011122--++++=+++-++=fwS C T Fe Al Al P P P P P P P Sn =0.02298Sn =0.0229897.转速()p S f n n -=1120=6)02289.01(50120-⨯⨯=977r/minn =977r/min98.最大转矩()1478.0023637.0202298.01212211+-=⎪⎭⎫ ⎝⎛++-=x r r S T nM=2.8495M T =2.849599.起动电流假定值KW M st I T I ⋅=')5.3~5.2(=2.955⨯2.8495⨯13.1579=110.79'st I =110.79100.起动时漏磁路饱和引起漏抗变化的系数()Cst L g AT B β⋅=6.1=96578.045.06.1714.2718⨯⨯=3909.78 对应Kz=0.53L B =39.9.78()()0211211111707.0ε-⎥⎦⎤⎢⎣⎡⋅⋅+⋅'=Q Q K K K a Z I AT p d U st st()st AT =2718.714=110.79⨯17⨯0.70797166.044549848.0956.091557.02⎪⎭⎫ ⎝⎛⨯⨯+=2718.714215.264.0t t g C ++=β =0.64+2.55727.1492641.1145.0+=0.96578101.齿顶漏磁饱和引起定子齿顶宽度的减少()()Z S K b t C --=10111=(11.92641-3.5)(1-0.53) =3.961S C =3.96102.齿顶漏磁饱和引起转子齿顶宽度的减少()()Z 0222S K 1b t C --==(14.5727-1)(1-0.53) =6.3792S C =6.379103.起动时定子槽单位漏磁导()()111111L L U U U st S K K λλλλ⋅+∆-= =0.916667(0.3842-0.14815)+0.9375⨯1.237789 =1.3768()st S 1λ=1.3768式中:1U λ∆=0.14815104.起动时定子槽漏抗()()21496.05126.13768.11111⨯==S S st S st S x x λλ =0.51153Cx()st S x 1=0.51153Cx105.起动时定子谐波漏抗()11d Z st d x K x ⋅==0.53⨯0.4945Cx=0.262Cx()st d x 1=0.262Cx106.定子起动漏抗()()()1111e st d st S st x x x x ++==(0.51153+0.262+0.2113)Cx =0.03767()st x 1=0.03767107.考虑到挤流效应的转子导条相对高度2446.2134.4505.311987.01987.0=⨯⨯=⋅⋅=BR B Bb fb h ρξ ξ=21.2446式中:B hB h =31.5mmR Bb b RBb b =1B ρB ρ=4.34B ρ=4.34108.转子挤流效应系数~r r =2.106836 0~r r =2.106836~x x =0.25 0~x x =0.25 109.起动时转子槽单位漏磁导()()()st L st U st S 222λλλ+==0.06776+0.83541=0.90317()st S 2λ=0.90317式中:()222U U st U λλλ∆-==0.5-0.43224=0.06776()st U 2λ=0.067762U λ∆=0.43224 2U λ∆=0.43224()20~2L st L x x λλ⋅==0.25⨯3.341641=0.83541 ()st L 2λ=0.83541110.起动时转子槽漏抗()()Cxx x S S st S st S 11284.105984.0841641.373268.22222=⨯==λλ ()st S x 2=Cx 11284.1111.起动时转子谐波漏抗()22d Z st d x K x ⋅==0.53⨯0.6619Cx=0.3508Cx()st d x 2=0.3508Cx112.起动时转子斜槽漏抗()SK Z st SK x K x ⋅==0.53⨯0.2216Cx=0.11744Cx()st SK x =0.11744Cx113.转子起动漏抗()()()()st SK e st d st S st x x x x x +++=2222=(1.11284+0.3508+0.11744+0.098) ⨯0.03825 =0.064225()st x 2=0.064225114.起动总漏抗()()()st st st x x x 21+==0.064225+0.03767=0.101895()st x =0.101895115.转子起动电阻()RB B B B st r r l l l l l r rr +⎥⎦⎤⎢⎣⎡-+⎪⎪⎭⎫ ⎝⎛=0~2019855.024040240200106836.2⎪⎭⎫ ⎝⎛+⨯==0.03761()st r 2=0.03761116.起动总电阻 ()()st st r r r 21+==0.023637+0.03761=0.061 ()st r =0.061 117.起动总阻抗()()()118758.0101895.0061.02222=+=+=st st st x r z()st z =0.118758118.起动电流()7959.110118758.01579.13===st KW st z I Ist I =110.79591861.691.177959.1101===I I i st st st i 6.1861119.起动转矩()()()()02298.010141.003761.0122-=-=n st st st S zr T=2.606st T =2.606。
一、毕业设计的要求和内容(包括原始数据、技术要求、工作要求)1、 原始数据① 型号:丫② 额定功率:P N =55KW ③ 额定电压:U N =380V ④ 额定转速:n N= 750n/min ⑤ 额定频率:f N =50H Z2、 主要性能指标① 效率: =92% ② 功率因数:cos =0.88③ 最大转矩倍数:TmT N =22倍3、 设计中选用的基值① 电压基准值:U N 、=380V 为电动机额定相电压② 功率基准值:P N =55KW 为电动机额定功率③ 电流基准值:% 为电动机每相的功电流Ikw —Y =48.2456 A2 2④ 阻抗基准值:聖竺-=7.876I kw P N 55000⑤ 转矩基准值:T N 为电动机额定转矩 T N =9550』=9550^^~ =95.5n/minn N 5504、 设计指标要求① 效率:耳―“ <0 005 H —计算值,耳’一修改值nF T '整改值,F T —+算值,(1-$)'整改值,(1-1)—计算值③满载电势标么值: (1 一 ;L )一(1 一 ;L ) ::0.005④起动电流倍数: 1St — 1st 1st :::0.01~0.03 1ST '整改值,1ST —计算值④起动转矩倍数: ⑤ 起动电流倍数:5、电磁设计中若干参数的选择及经验数据① 槽满率: sf=75% -80%② 槽绝缘厚:采用聚脂薄膜和聚脂无纺布复合材料( DMD , DMD+M 和DMDM )③ 槽楔厚h :槽楔采用新型软槽楔和3240环氧玻璃布压板,计算时厚度h=2mm :④ 叠压系数:H80-H160 定子冲片不涂漆时 =0.95 H180-H280定子冲片涂漆时=0.92⑤ 冲剪余量:S =0.5cm⑥ 转子斜槽:为一个定子齿距 ⑦ 定子绕组型式:H160及以下全部采用单层软绕组;H180及以上采用双 层迭绕组 ⑧ 硅钢片材料:采用D23硅钢片,⑨ 导电材料:定子绕组采用 QZ-2型高强度聚脂漆包圆铜线;转子铸铝,采用AL-1 ;线径为0.63-1.0(mm)时,漆膜双面厚度计算时取 0.06mm;线径为1.0-1.6(mm)时,漆膜双面厚度计算时取 0.08mm;⑩ 设计时杂散损耗假定值:&设计要求① 复算原设计方案;② 上机设计三个方案: 在原复算方案的基础上节省材料;在原复算方案的基础上提高性能;在原复算方案的基础上既节省材料,又提高性能;③将最好的一个方案的全部设计步骤、计算过程写出来(要有文档、电子 版本及幻灯片);④ 将三个方案进行比较,并用已学过的理论进行分析。
H80—H112H132—H160 H180—H280Ci=0.25(mm ) Ci=0.3( mm )三、本课题研究内容:中小型三相感应电动机电磁计算程序是根据技术条件或技术任务书(技术建议书)的规定,参照生产实践经验,通过计算和方案比较,来确定与所设计电机电磁性能有关的尺寸和数据,选定有关材料,并核算其电磁性能。
其主要内容包括以下四个步骤,分别是:a)额定数据及主要尺寸的计算;b)磁路计算;c)参数计算;d)起动计算。
四、本课题研究方案:在核算原方案的基础上,进一步设计三个方案,其中多个方案亦有不同的要求,从而找出最佳方案:方案一:节省材料,将铁芯缩短5毫米,尽量减少定子绕组用铜量、用硅铜量、用铁量和转自绕组用铝量。
方案二:提高性能,提高效率、减少起动电流、增大起动转矩和最大转矩。
方案三:既节省又提高性能。
摘要............................ 错误!未定义书签。
ABSTRACT ...................... 错误!未定义书签。
绪论............................ 错误!未定义书签。
第1章异步电机概念................... 错误!未定义书签。
1.1异步电机的类型、特点和用途............. 错误!未定义书签。
1.2异步电机的发展趋势................ 错误!未定义书签。
第2章三相异步电动机的基本结构和工作原理 (1)2.1三相异步电动机的基本结构 (1)2.2三相异步电动机的铭牌数据与主要系列 (2)2.3三相异步电动机的工作原理 (4)2.4三相异步电动机的机械特性和工作特性 (5)第3章电机设计基本理论 (6)3.1电机制造与设计的概况 (6)3.2电磁设计 (6)第4章毕业设计手算程序及优化方案 (9)4.1手算程序 (9)4.2优化方案 (28)结论 (32)参考文献 (33)附录I.CAD图 (35)表1-1三相异步电动机的分类第2章三相异步电动机的基本结构和工作原理2.1三相异步电动机的基本结构三相异步电动机主要是由定子和转子两大部分组成,转子有鼠笼型及绕线型转子两种。
定子与转子之间有气隙,中小型三相异步电动机的气隙一般为0.2~2mm。
1、定子异步电动机的定子是用来产生磁场的,它一般由定子铁心、定子绕组和外壳组成。
(1)定子铁心定子铁心一般由圆形铁心冲片、齿压板和压圈等零件压装后,经扣片或焊接紧固定成一体。
铁心冲片一般由相互绝缘的0.5mm厚的硅钢片冲成,常用的硅钢片有D22、D23等型号。
冲片内圈有均匀分布的槽,用来嵌放定子绕组。
定子铁心的槽及开口三种。
中小型低压电机一般采用半闭口槽。
(2)定子绕组三相异步电动机的定子绕组由对称的三个绕组组成,每个绕组异步电动机的定子绕组由许多线圈接一定的规律连接而成。
中小型低压电动机的线圈由高强度漆包线绕制、线圈与槽壁之间垫以槽绝缘。
定子绕组在槽内的布置分为单层绕组和双层绕组两种基本形式。
10kw以下的小容器异步电动机常用单层同心式、链式或交叉式绕组。
双层绕组的优点是可以灵活选择节距以改善电动势和磁通式波形,因此容量大的异步电动机都采用双层短距叠绕组或波绕组。
绕组嵌好后用槽楔锁口压紧,槽楔用竹、胶布板和环氧玻璃布板等非磁性材料组成。
(3)外壳外壳包括机座、端盖、轴承盖、接线盒及吊环等部件。
小型机座通常用灰铸铁铸成。
大、中型箱式电动机机座由钢板焊接而成。
端盖是支承轴并受径向和轴向负荷的重要部件,由灰铸铁铸成。
有的机座的端盖与外轴承盖铸成一体,具有装配方便、节省工时等优点。
2、转子异步电动机的转子由转子铁心、转子绕组和转轴组成。
(1)转子铁心转子铁心是用0,5mm 厚的硅钢片叠成的圆柱体,另一种是绕线转子。
笼型转子是铸铝的或铜条焊接的笼型转子,整个铁心固定在转轴或转子支架上,如果去掉铁心,整个绕组的外形就像一个松笼子,所以习惯上又称笼型转子为鼠笼转子。
(2)转子绕组转子绕组分为笼型和绕线型两种结构。
笼型绕组有双笼型及深槽型,这两种转子可改善异步电动机的启动性能,主要用于100kw 以上的大中型电动机。
绕线转子绕组与定子绕组一样,也是由对称三相绕组构成,一般接成星形联结,三根引出线分别接到与转轴绝缘的三个滑环(又称集电环)上,通过电刷装置可与外电组或其他控制器相连接,以改善电动机的启动性能和调速性能。
为了减少电刷与集电环的磨损,中等容量以上的绕线转子电动机装有举刷装置,电动机启动后,可将电刷提起,同时将三个集电环短接。
(3)转轴转轴一般用中碳钢制成,转子铁心套在转轴上或通过压圈套在轴上,它支持着转子,使转子在定子内腔均匀地旋转,并传导三相电动机所输出的转矩。
3、气隙如同其他旋转电机一样,异步电机的定子与转子之间必须有一气隙。
由于气隙是电机磁路的一部分,气隙的大小对异步电动机的运行性能有很大影响。
气隙越大,磁阻越大,要产生同样大小的旋转磁场,就需要较大的励磁电流,从而使异步电动机的功率因素下降。
为了提高功率因素,气隙应尽可能的小。
但是的最小值常由制造工艺和运行安全可靠性等因素决定。
从减少附加损耗并减少高次谐波磁通势产生的磁通来看,气隙稍大一点也有其有利的一面。
但总的来说,异步电动机的气隙比同步电机的小得多,在中小型异步电动机中,气隙大约为0,2mm~1.5mm。
2.2 三相异步电动机的铭牌数据与主要系列每台电动机的外壳上都应有一块铭牌,铭牌上标出这台电动机额定值及其他必要事项。
1、三相异步电动机的铭牌额定数据(1)型号Y 系列国产三相异步电动机型号是按国际电工委员会IEC 标准设计生产的新系列三相电动机,它是以电动机中心高为依据编制型号谱的,如:“Y180M-2 ”一Y :异步电动机;180:中心高180mm;M :中机座(L-长机座, S-短机座);2:2极。
(2)额定功率指电动车在额定运行时,轴端输出的机械功率,单位为瓦(W)或千瓦(KW )。
(3)额定电压指电动机在额定运行时,加在定子绕组上的线电压,单位为伏(V)。
如果铭牌上标有两个电压数据,如220V/380V,表示电动机定子绕组在两种不同联结时的线电压。
(4)额定电流指电动机在额定电压下,轴端输出额定功率时,定子绕组中的线电流,单位为安(A)。
如果铭牌上标有两个电流数据,表示的定子绕组在两种不同联结时的输入电流。
(5)额定频率指输入交流电(即电网)的频率,我国规定的电网频率为50HZ,除出口电动机(多为60HZ )外,国内用的异步电动机的额定频率都是50HZ。
(6)额定转速指电动机在额定频率、额定电压下,且轴端输出的额定功率时,转子每分钟的转速,单位为转/分(r/min)。
(7)额定功率因数指电动机额定运行时,定子相电压与相电流之间的相位差。
(8)额定效率指电动机在额定运行时的效率。
(9)绝缘等级指电动机在额定运行时,绕组允许的温度升高值(即绕组的温度比周围空气稳定高出的数值)。
允许温升的高低取决于电动机使用的绝缘材料。
绝缘材料的耐热等级见表2-1,也有些电动机制造厂在铭牌上直接给出电动机的允许温升。
表2-1绝缘材料的耐热等级(10)标准符号至电动机产品按这个标准生产,技术数据能表达到这个标准的要求。
(11)工作制或定额指三相电动机的运行状态,即允许连续使用的时间,分为连续、短时、断续周期三种。
连续工作制(S1)的电动机在铭牌规定的额定负数范围内允许长期连续使用。
短时工作制(S2)的电动机在铭牌规定的条件下,只能在规定的时间内短时运行,短时运行的持续时间标准有四种:10min、30min、60min及90min,达到规定的时间后必须停机,待三相电动机完全冷却后才可以开机运行。
断续周期工作制(S3)的电动机在铭牌规定的额定值下只能周期性使用,断续运行常以负载持续率百分数表示,标准负载持续率分为四种:15%、25%、40%、60%,每周期为10min。
(12)联结指三相电动机定子绕组的六根引出线头的接线方式,即接成Y还是△。
接线时必须注意电动机电压、电流、联结三者之间的关系。