6. 三相鼠笼式异步电动机及控制
- 格式:ppt
- 大小:811.50 KB
- 文档页数:12
实训一 三相异步电动机接触器点动控制 实训一 三相异步电动机接触器点动控制一、训练目的1.通过观察实物,熟悉按钮和接触器的结构和使用方法。
2.通过实践,掌握具有短路保护的点动控制电路安装接线与检测方法。
3.掌握使用万用表检查电路的方法。
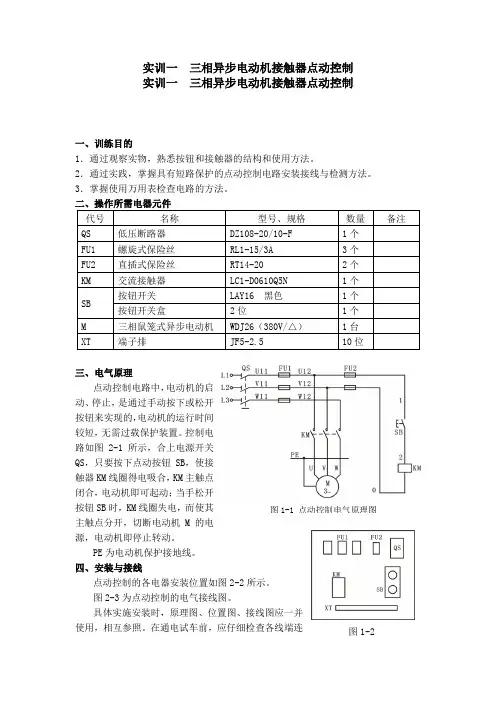
三、电气原理点动控制电路中,电动机的启动、停止,是通过手动按下或松开按钮来实现的,电动机的运行时间较短,无需过载保护装置。
控制电路如图2-1所示,合上电源开关QS ,只要按下点动按钮SB ,使接触器KM 线圈得电吸合,KM 主触点闭合,电动机即可起动;当手松开按钮SB 时,KM 线圈失电,而使其主触点分开,切断电动机M 的电源,电动机即停止转动。
PE 为电动机保护接地线。
四、安装与接线点动控制的各电器安装位置如图2-2所示。
图2-3为点动控制的电气接线图。
具体实施安装时,原理图、位置图、接线图应一并使用,相互参照。
在通电试车前,应仔细检查各线端连图1-2图1-1 点动控制电气原理图接是否正确、可靠,并用万用表的欧姆档检查控制回路是否短路或开路(按下起动控制按钮时,控制电路的两端电阻应为吸引线圈的直流电阻)、主电路有无开路或短路等。
图1-3 点动控制电路接线图实训二 三相异步电机接触器自锁控制线路在点动控制的电路中,要使电动机转动,就必须用手按住按钮不放,这不适合电动机长时间连续运行的控制场合,而必需具有接触器自锁的控制电路。
二、训练目的1.通过实践训练,熟悉热继电器的结构、原理和使用方法。
2.通过实践训练,掌握具有过载保护的接触器自锁电路安装接线与检测。
3.进一步熟练万用表的使用。
三、电气原理因电动机是连续工作,必须加装热继电器以实现过载保护,具有过载保护的自锁控制电路的电气原理如图2-1所示,它与点动控制电路的不同之处在于控制电路中增加了一个停止按钮SB1,在启动按钮的两端并联了一对接触器的常开触头,增加了过载保护装置(热继电器FR )。
电路的工作过程:按下启动按钮SB2→接触器KM 线圈通电→KM (3-4)闭合自锁,同时KM 主触头闭合,电动机M 起动运行。
实验十 三相鼠笼式异步电动机串电阻降压起动控制线路
掌握三相异步电动机串电阻降压起动控制线路的接线\工作原理和常见故障排除方法
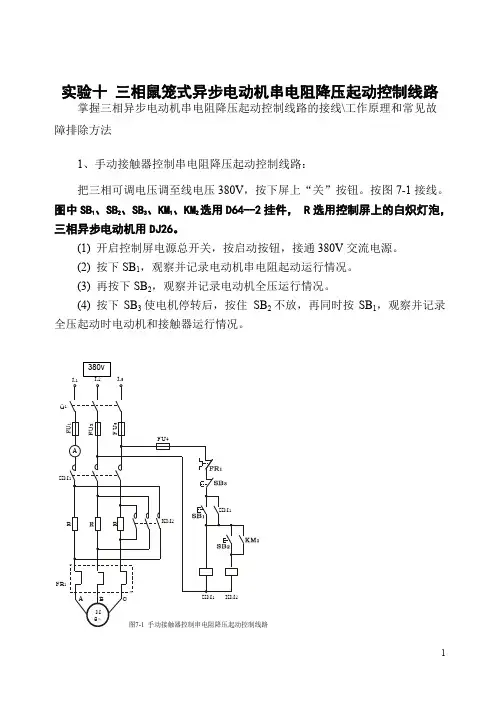
1、手动接触器控制串电阻降压起动控制线路:
把三相可调电压调至线电压380V ,按下屏上“关”按钮。
按图7-1接线。
图中SB 1、SB 2、SB 3、KM 1、KM 2选用D64--2挂件, R 选用控制屏上的白炽灯泡,
三相异步电动机用DJ26。
(1) 开启控制屏电源总开关,按启动按钮,接通380V 交流电源。
(2) 按下SB 1,观察并记录电动机串电阻起动运行情况。
(3) 再按下SB 2,观察并记录电动机全压运行情况。
(4) 按下SB 3使电机停转后,按住 SB 2不放,再同时按SB 1,观察并记录全压起动时电动机和接触器运行情况。
FR
2、时间继电器控制串电阻降压起动控制线路:
关断电源后,按图7-2接线。
图中SB
1、SB
2
、KM
1
、KM
2
、KT
1
选用D64挂件,
R选用白炽灯泡,电机用DJ26。
(1)开启控制屏电源总开关,按启动按钮,接通380V交流电源。
(2) 按下启动按钮SB2,观察并记录电动机串电阻起动时各接触器吸合情况、电动机运行状态。
(3) 隔一段时间,时间继电器KT1吸合后,电动机全压运行时各接触器吸合情况、电动机运行状态。
图7-2 时间继电器控制串电阻降压起动控制线路
思考题
1、画出手动接触器控制串电阻降压起动控制线路和时间继电器控制串电阻降压起动控制线路工作原理流程图。
2、降压起动的自动控制与手动控制线路比较,有哪些优点?。
三相鼠笼异步电动机实验报告一、实验目的1.通过实验学习三相鼠笼异步电动机的基本结构和工作原理;2.观察电动机启动的过程,掌握电动机起动的方法;3.通过实验,了解电动机的特性,特别是负载特性;4.学习电动机的维护保养方法,提高电动机的使用寿命。
二、实验原理三相鼠笼异步电动机是应用广泛的电动机之一,它由定子和转子两部分组成。
定子和转子的结构是相同的,都是由三个相位的线圈组成,因此称为三相电动机。
其基本结构如图1所示。
图1 三相鼠笼异步电动机的基本结构三相鼠笼异步电动机是通过三相交流电源提供的电磁场来运转的。
当电动机的定子上通有三相交流电流时,就会在定子中形成一个旋转磁场。
这个旋转磁场的同步转速为:Ns = 120f/p其中,f为电源频率,p为电动机极数。
在定子磁场的作用下,转子线圈中感应出一个交变电动势,从而在转子中产生一个电流,该电流在转子绕组中产生了一个磁场,与定子磁场相互作用,使转子产生一个旋转力矩,从而使电动机运转起来。
三相鼠笼异步电动机的启动方法通常有直接起动、星三角起动、自耦变压器起动和变频起动等。
在实际应用中,要根据电动机的功率和负载的特点选择合适的起动方式。
同时,在负载运转的过程中,电动机的转速可能会受到负载的影响,从而产生转速波动。
因此,了解电动机的特性,特别是负载特性是非常重要的。
三、实验内容本实验使用的是三相鼠笼异步电动机,实验内容包括:1.电动机的组装和连接;2.电动机直接起动实验;3.电动机负载特性实验;4.电动机保养和维护。
四、实验步骤1.将三相鼠笼异步电动机的零部件全部取出来,包括定子、转子和末端盖等,然后根据说明书将定子和转子组装好,并安装到电动机底座上。
2.将电动机的电源线连接好,然后将电动机转子旋转几圈,检查电动机的运转是否灵活,是否有卡滞和松动现象。
3.将电动机启动电源接入到三相电源上,然后将电动机的开关打开,观察电动机的起动过程。
在启动的过程中,要注意观察电动机各部件的运转情况,以及是否出现异常声音和震动等现象。
鼠笼式三相异步电动机结构一、引言鼠笼式三相异步电动机是一种常见的工业用电动机,其结构简单、可靠性高、维护方便,广泛应用于各个领域。
它采用了一种特殊的转子结构,使得电动机能够在三相交流电源的激励下产生旋转磁场,从而实现机械能的转换。
二、鼠笼转子的结构鼠笼式三相异步电动机的转子由许多平行排列的导体棒组成,这些导体棒通常是铜或铝制成。
导体棒的两端通过两个短路环连接起来,形成了一个类似于鼠笼的结构,因此被称为鼠笼转子。
这种结构简单、坚固,能够承受高电流和高转速的工作条件。
三、定子的结构鼠笼式三相异步电动机的定子由三个相互平衡的线圈组成,每个线圈都被均匀地分布在定子的周围。
这三个线圈分别连接到三相交流电源上,通过电流的流动产生旋转磁场。
定子的结构通常采用铁芯绕组,以提高磁场的强度和稳定性。
四、工作原理当三相交流电源通电时,定子中的电流会产生一个旋转磁场,这个磁场的方向和大小随着电源电压和频率的变化而变化。
而鼠笼转子中的导体棒处于这个旋转磁场中,由于导体棒本身的电阻,导体棒中会产生感应电流。
这些感应电流在导体棒中形成了一个与旋转磁场方向相反的磁场,产生了一个电磁力,使得转子开始旋转。
由于导体棒是短路的,感应电流会在导体棒之间形成环流,使得转子继续旋转。
这样,电动机就完成了能量的转换,将电能转化为机械能。
五、优点和应用鼠笼式三相异步电动机具有结构简单、可靠性高、维护方便等优点,因此被广泛应用于各个领域。
它常用于电动机驱动的机械设备,如风机、泵、压缩机等。
由于其可靠性高,即使在恶劣的工作环境下,也能够正常工作。
此外,鼠笼式三相异步电动机的启动电流较小,能够节约能源,降低电网负荷。
六、总结鼠笼式三相异步电动机是一种结构简单、可靠性高的电动机。
其通过鼠笼转子的特殊结构,利用定子中的旋转磁场产生感应电流,从而将电能转化为机械能。
由于其优点和应用广泛,鼠笼式三相异步电动机在各个领域都有着重要的地位。
我们在日常生活和工业生产中都能够看到它的身影,为我们的生活和工作提供了便利。
实验十二三相鼠笼式异步电动机使用与控制一、实验目的1. 熟悉三相鼠笼式异步电动机的结构和额定值。
学习检验异步电动机绝缘情况及电动机定子绕组首、末端的判别方法。
2. 掌握三相鼠笼式异步电动机的起动和反转方法。
3. 通过对三相鼠笼式异步电动机点动控制、自锁控制、正反转控制线路的安装接线,掌握由电气原理图接成实际操作电路的方法。
4. 加深对电气控制系统各种保护、自锁、互锁等环节的理解。
二、原理说明1. 三相鼠笼式异步电动机的结构异步电动机是基于电磁原理把交流电能转换为机械能的一种旋转电机。
三相鼠笼式异步电动机的基本结构有定子和转子两大部分。
定子主要由定子铁心、三相对称定子绕组和机座等组成,是电动机的静止部分。
三相定子绕组一般有六根引出线,出线端装在机座外面的接线盒内,如图12-1所示,根据三相电源电压的不同,三相定子绕组可以接成星形(Y)或三角形(△),然后与三相交流电源相连。
转子主要由转子铁心、转轴、鼠笼式转子绕组、风扇等组成,是电动机的旋转部分。
小容量鼠笼式异步电动机的转子绕组大都采用铝浇铸而成,冷却方式一般都采用风冷式。
图 12-1 三相定子绕组(△)接2. 三相鼠笼式异步电动机的铭牌三相鼠笼式异步电动机的额定值标记在电动机的铭牌上,如下表所示为本实验装置三相鼠笼式异步电动机铭牌。
(1) 功率额定运行情况下,电动机轴上输出的机械功率。
(2) 电压额定运行情况下,定子三相绕组应加的电源线电压值。
(3) 接法定子三相绕组接法,当额定电压为380V时,△接法。
(4) 电流额定运行情况下,当电动机输出额定功率时,定子电路的线电流值。
3. 三相鼠笼式异步电动机的反转异步电动机的旋转方向取决于三相电源接入定子绕组时的相序,故只要改变三相电源与定子绕组连接的相序即可使电动机改变旋转方向。
4. 三相鼠笼式异步电动机的继电接触控制在控制回路中常采用接触器的辅助触头来实现自锁和互锁控制。
要求接触器线圈得电后能自动保持动作后的状态,这就是自锁,通常用接触器自身的动合触头与起动按钮相并联来实现,以达到电动机的长期运行,这一动合触头称为“自锁触头”。
电工实习报告--鼠笼式异步电动机的正反转控制电工实习报告姓名:高雪珍班级:11自动化1班学号:2011551603指导老师:李辉鼠笼式异步电动机的正反转控制一、实验目的1(了解交流接触器、热继电器和按钮等几种常用控制电器的结构,并熟悉它们的联接方法。
2(通过实验操作,加深理解鼠笼式电动机直接启动控制线路的工作原理及各环节的作用。
3(了解复式按钮的结构、联接方法及其所起的作用,通过实验加深理解鼠笼式电动机正反转控制线路的工作原理,明确控制线路中两个接触器联锁的必要性。
4(了解行程开关的工作原理及其在控制电路中所起的作用,并用行程开关设计行程控制和自动循环控制。
二、实验仪器与设备1(三相交流电源一个2(三相鼠笼式异步电动机一台3(交流接触器两个4(热继电器一个(按钮三个 56(万用表一块三、预习要求1(了解三相异步电动机铭牌数据的意义。
2(了解几种常用控制电器的结构、用途和工作原理。
3(复习鼠笼式三相异步电动机直接启动控制电路的工作原理,并理解自锁及点动的概念,以及短路保护、过载保护和零压保护的概念。
4(复习三相鼠笼式异步电动机正反转控制线路的工作原理,弄清实现正反转时各控制元件动作过程。
为什么必须保证两个接触器不能同时工作,采取什么措施可以解决这一问题,5(复习行程开关和通电延时的时间继电器的工作原理,并独立设计行程控制和时间控制的实验控制线路图。
四、实验内容与步骤1. 三相鼠笼式异步电动机的直接起动控制图1 直接起动控制电路在切断电源的情况下,按图 1 接线。
通常先用粗线接好主电路,然后再用细线接控制电路,并且按“先接串联电路、后接并联电路”的方法进行接线。
要求在任一联接点上不超过两根导线,以保证接线的牢靠、安全。
线路接好后,仍按先主电路后控制电路的顺序依次检查。
对所接线路的检查核对也可用万用表在不带电的情况下,通过各触点闭合或断开时电路阻值的变化来判断,同学可按自行拟定的检查程序进行检查。
在确认所接线路正确无误后,便可通电进行控制操作。
三相鼠笼式异步电机工作原理三相鼠笼式异步电机是目前工业和民用领域使用最为广泛的电机之一。
它适用于各种功率等级,广泛应用于机器制造、电力、交通、建筑、矿山等各个领域。
本文将介绍三相鼠笼式异步电机的工作原理。
一、三相鼠笼式异步电机基本构造三相鼠笼式异步电机的基本构造由固定部分和旋转部分组成。
其固定部分又称为定子,由铁心、绕组和端盖等组成;旋转部分又称为转子,由铁心和根据不同型号而有所不同的铝或铜向外突出的鼠笼形导条所组成。
转子可分为两类,一类是短路转子(又称鼠笼转子),另一类是抽象极转子。
二、三相鼠笼式异步电机工作原理三相鼠笼式异步电机是一种交流电动机,其工作原理是依据异步电动机的运行原理。
异步电动机的运行是通过定子上交变电磁场与转子中感应电动势作用产生的扭矩来实现的。
1. 定子产生旋转磁场三相交流电压AC在定子上的三个绕组(也称为初始绕组)间轮流通电,分别形成三个简单的旋转磁场,这三个旋转磁场相互距离相等,夹角为120度,并沿着定子的纵轴线旋转。
这个旋转磁场是由定数上的电流所产生的,定子上的电流也是由交流电压所引起的。
2. 转子中产生感应电动势由于变化的磁场,在转子中感应出一电流。
这不仅有能量损失,也会导致电机损耗。
这时电动磁通的作用在转子中生成感应电流,而感应电流在旋转磁场的作用下将受到些方向和大小变化的力的作用,使它绕着定子的纵轴线旋转。
3. 定子和转子的同步速度不同定子两个极间的电磁场总是与转子上的导条彼此交错。
当变化的磁场转动时,导条内的电流也会随之偏转。
由于旋转磁场的旋转速度不同于转子的旋转速度,导致在转子中形成了电流的旋转磁场,与定子电磁场方向相对。
在理论上,如果转子的旋转速度与电磁场的旋转速度相同,那么就可以获得最大扭矩。
4. 转子受到的力和扭矩在实际情况中,转子的旋转速度比电磁场的旋转速度稍慢一些,导致效率稍微降低。
由于定子和转子之间的磁场之间的相对滞后,产生了导电节团中的电流旋转磁场,电机的转动根据力矩计算,可得到最大扭矩的产生时刻,此时转子的旋转速度与电磁场的旋转速度相同。
实验一三相鼠笼式异步电动机点动、自锁控制和正反转控制一、实验目的1. 通过对三相鼠笼式异步电动机点动控制和自锁控制线路的实际安装接线,掌握由电气原理图变换成安装接线图的知识。
2. 通过对三相鼠笼式异步电动机正反转控制线路的安装接线,掌握由电气原理图接成实际操作电路的方法。
3. 加深对电气控制系统各种保护、点动控制、自锁、互锁等环节的理解。
4. 学会分析、排除继电--接触控制线路故障的方法。
二、原理说明1. 继电─接触控制在各类生产机械中获得广泛地应用,凡是需要进行前后、上下、左右、进退等运动的生产机械,均采用传统的典型的正、反转继电─接触控制。
交流电动机继电─接触控制电路的主要设备是交流接触器,其主要构造为:(1) 电磁系统─铁心、吸引线圈和短路环。
(2) 触头系统─主触头和辅助触头,还可按吸引线圈得电前后触头的动作状态,分动合(常开)、动断(常闭)两类。
(3) 消弧系统─在切断大电流的触头上装有灭弧罩,以迅速切断电弧。
(4) 接线端子,反作用弹簧等。
2. 在控制回路中常采用接触器的辅助触头来实现自锁和互锁控制。
(1)自锁。
要求接触器线圈得电后能自动保持动作后的状态,这就是自锁,通常用接触器自身的动合触头与起动按钮相并联来实现,以达到电动机的长期运行,这一动合触头称为“自锁触头”。
(2)互锁。
使两个电器不能同时得电动作的控制,称为互锁控制,如为了避免正、反转两个接触器同时得电而造成三相电源短路事故,必须增设互锁控制环节。
为操作的方便,也为防止因接触器主触头长期大电流的烧蚀而偶发触头粘连后造成的三相电源短路事故,通常在具有正、反转控制的线路中采用既有接触器的动断辅助触头的电气互锁,又有复合按钮机械互锁的双重互锁的控制环节。
○1电气互锁为了避免接触器KM1(正转)、KM2(反转)同时得电吸合造成三相电源短路,在KM1(KM2)线圈支路中串接有KM1(KM2)动断触头,它们保证了线路工作时KM1、KM2不会同时得电(如图30-1),以达到电气互锁目的。
三相异步电动机实验一、实验目的1、熟悉和掌握实验电机及仪器设备等组件的使用方法。
2、学习三相异步电动机定子绕组首、末端的判别方法。
3、通过实验掌握异步电动机的起动和反转。
二、实验项目1、测量三相鼠笼式异步电动机的定子绕组的冷态电阻。
2、认定三相鼠笼式异步电动机定子绕组的首末端.3、三相鼠笼式异步电动机的轻易再生制动。
4、三相鼠笼式异步电动机的星形――三角形(y-δ)换接起动。
三、实验方法1、测量三相鼠笼式异步电动机的定子绕组的冷态电阻。
测量线路图为图21-1。
直流电源用主控屏上电枢电源先调至50v。
控制器s1、s2采用挂箱上的模块,r用挂箱上1800ω调节器电阻。
图21-1三相交流绕组电阻测定量程的挑选:测量时通过的测量电流应当大于额定电流的20%,约为50毫安,因而直流电流表的量程用200ma档。
三相鼠笼式异步电动机定子一相绕组的电阻约为50ω,因而当穿过的电流为50毫安时二端电压约为2.5伏,所以直流电压表量程用20v档。
按图24-1接线。
把r调至最大位置,合上开关s1,调节直流电源及r阻值使试验电流不超过电机额定电流的20%,以防因试验电流过大而引起绕组的温度上升,读取电流值,再接通开关s2读取电压值。
读完后,先打开开关s2,再打开开关s1。
调节r并使a表中分别为50ma,40ma,30ma测取三次,挑其平均值,测量定子三相绕组的电阻值,记录于表中24-2中。
表24-2室温℃i(ma)u(v)r(ω)注意事项<1>在测量时,电动机的转子须静止不动。
<2>测量通电时间不应当少于1分钟。
2、认定定子绕组的首末端绕组ⅰ绕组ⅱ绕组ⅲ先用万用表测出各相绕组的两个线端,将其中的任意两相绕组串联,如图24-2所示。
将控制屏左侧调压器旋钮调至零位,开启电源总开关,按下“开”按钮,接通交流电源。
调节调压旋钮,并在绕组端施以单相低电压u=80~100v,注意电流不应超过额定值,测出第三相绕组的电压,如测得的电压值有一定读数,表示两相绕组的末端与首端相联,如图24-2(a)所示。
《电机与电气控制技术》一、填空题(本题30分, 每空1分)Array1.时间继电器按延时方式可分为型和型。
2.变压器的三大作用是、和。
3.异步电动机的转子可分为和两种。
4.热继电器在电路中作为保护,熔断器在电路中作为保护。
5.电磁机构一般由、、等构成6.三相鼠笼式异步电动机在运行中断了一根电源线,则电机转速。
7.仪表用电压互感器二次侧额定电压为______V,电流互感器二次侧额定电流为_______A。
8.某4极50HZ的电动机,其三相定子磁场的速度为_____,若额定转差率为0.04,则额定速度为_____。
9.在多点操作的控制电路中,通常几个按钮触点应该是常开、常闭。
10.三相异步电动机的调速方法有调速、调速和调速等三种。
11.笼型异步电机的降压起动方法有:、、。
12.按钮用来短时间接通或断开小电流,色表示起动,色表示停止。
13.自动空气开关它是既能通断电路,又具备、、等三大保护。
二、单项选择题(共20分,每题2分)1.交流接触器的发热是主要的。
A、线圈B、铁心C、触头2.某交流接触器在额定电压380V时的额定工作电流为100A,故它能控制的电机功率约为。
A、50KWB、20KWC、100KW3.下列电器中不能实现短路保护的是。
A、熔断器B、热继电器C、空气开关D、过电流继电器4.热继电器过载时双金属片弯曲是由于双金属片的。
A、机械强度不同B、热膨胀系数不同C、温差效应5. 当必须从使用着的电流互感器上拆除电流表时,应首先将互感器的二次侧可靠,然后才能把仪表联接线拆开。
A、断开; B、短路; C、接地; D、接零6.保护晶闸管,可选用型熔断器?A、RLS1B、RC1AC、RT0D、RL17.变压器的铁心采用0.35—0.5mm厚的硅钢片叠压制造,其主要的目的是为了降低。
A、铜耗;B、磁滞损耗;C、涡流损耗;D、磁滞和涡流损耗8.U N、I N、ηN、cosϕN分别是三相异步电动机额定线电压,线电流、效率和功率因数,则三相异步电动机额定功率P N为。
电气控制技术实验指导书亳州职业技术学院实验一三相异步电动机点动和自锁控制线路一、实验目的1、通过对三相异步电动机点动控制和自锁控制线路的实际安装接线,掌握由电气原理图变换成安装接线图的知识。
2、通过实验进一步加深理解点动控制和自锁控制的特点以及在机床控制中的应用。
二、实验设备三、实验方法实验前要检查控制屏左侧端面上的调压器旋钮须在零位。
开启“电源总开关”,按下启动按钮,旋转调压器旋钮将三相交流电源输出端U、V、W的线电压调到220V。
再按下控制屏上的“关”按钮以切断三相交流电源。
以后在实验接线之前都应如此。
1、三相异步电动机点动控制线路:按图1-1接线。
图中SB1、KM1选用D61-2上元器件,Q1、FU1、FU2 、FU3 、FU4选用D62-2上元器件,电机选用WDJ24(△/220V)。
接线时,先接主电路,它是从220V三相交流电源的输出端U、V、W开始,经三刀开关Q1、熔断器FU1、FU2、FU3、接触器KM1主触点到电动机M的三个线端A、B、C 的电路,用导线按顺序串联起来,有三路。
主电路经检查无误后,再接控制电路,从熔断器FU4插孔V开始,经按钮SB1常开、接触器KM1线圈到插孔W。
线接好,图1-1 点动控制线路经指导老师检查无误后,按下列步骤进行实验:(1)按下控制屏上“开”按钮;(2)先合Q1,接通三相交流220V电源;(3)按下启动按钮SB1,对电动机M进行点动操作,比较按下SB1和松开SB1时电动机M的运转情况。
2、三相异步电动机自锁控制线路:按下控制屏上的“关”按钮以切断三相交流电源。
按图1-2接线,图中SB1、SB2、KM1、FR1选用D61-2挂件,Q1、FU1、FU2 、FU3 、FU4选用D62-2挂件,电机选用WDJ24(△/220V)。
检查无误后,启动电源进行实验:(1) 合上开关Q1,接通三相交流220V电源;(2) 按下启动按钮SB2,松手后观察电动机M运转情况;(3) 按下停止按钮SB1,松手后观察电动机M运转情况。