
《自动控制原理》课程设计(简明)任务书
引言:《自动控制原理》课程设计是该课程的一个重要教学环节,既有别于毕业设计,更不同于课堂教学。它主要是培养学生统筹运用自动控制原理课程中所学的理论知识,掌握反馈控制系统的基本理论和基本方法,对工程实际系统进行完整的全面分析和综合。
一、设计题目:位置随动系统的分析与设计
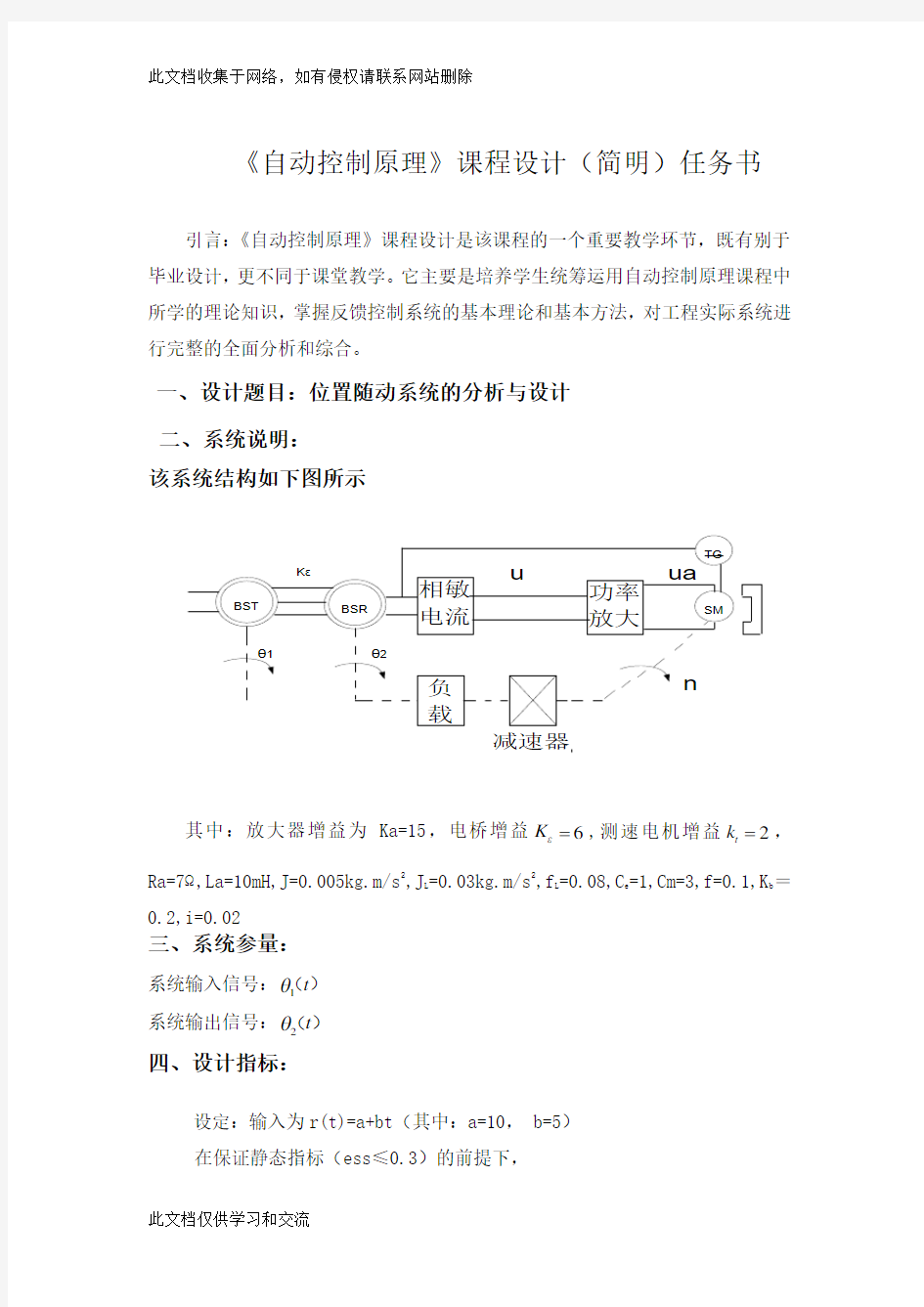
二、系统说明: 该系统结构如下图所示
BST
BSR
相敏
电流
功率放大
SM
负载
TG
减速器
θ1
θ2
K ε
ua
u
n
其中:放大器增益为Ka=15,电桥增益6K ε=,测速电机增益2t k =,Ra=7Ω,La=10mH,J=0.005kg.m/s 2,J L =0.03kg.m/s 2,f L =0.08,C e =1,Cm=3,f=0.1,K b =0.2,i=0.02
三、系统参量:
系统输入信号:)(t 1θ 系统输出信号:)
(t 2θ 四、设计指标:
设定:输入为r(t)=a+bt (其中:a=10, b=5) 在保证静态指标(ess ≤0.3)的前提下,
要求动态期望指标:σ
p ﹪≤15﹪;t
s
≤5sec;
五、基本要求:
1.建立系统数学模型——传递函数;
2.利用根轨迹方法分析系统:
(1)作原系统的根轨迹草图;
(2)分析原系统的性能,当原系统的性能不满足设计要求时,则进行系统校正。
3.利用根轨迹方法综合系统:
(1)画出串联校正结构图,分析并选择串联校正的类型(微分、积分和微分-积分校正);
(2)确定校正装置传递函数的参数;
(3)画出校正后的系统的根轨迹图,并校验系统性能;若不满足,则重新确定校正装置的参数。
4.完成系统综合前后的有源物理模拟电路;
六、课程设计报告:
1、课程设计计算说明书一份;
2、原系统组成结构原理图一张(自绘);
3、系统分析,综合用根轨迹图一张;
4、系统综合前后的模拟图各一张;
5、总结(包括课程设计过程中的学习体会与收获、对本次课程设计的认识等内容);
6、提供参考资料及文献;
7、排版格式完整、报告语句通顺、封面装帧成册
摘要
随动系统是指系统的输出以一定的精度和速度跟踪输入的自动控制系统,并
且输入量是随机的,不可预知的。在很多情况下,随动系统特制被控量是机械位移的比还控制系统。控制技术的发展,使随动系统得到了广泛的应用。
位置随动系统是反馈控制系统,是闭环控制,调速系统的给定量是恒值,希望输出量能稳定,因此系统的抗干扰能力往往显得十分重要。而位置随动系统中的位置指令是经常变化的,要求输出量准确跟随给定量的变化,输出响应的快速性、灵活性和准确性成了位置随动系统的主要特征。简言之,调速系统的动态指标以抗干扰性能为主,随动系统的动态指标以跟随性能为主。
在控制系统的分析和设计中,首先要建立系统的数学模型。控制系统的数学模型是描述系统内部物理量(或变量)之间关系的数学表达式。在自动控制理论中,数学模型有多种形式。时域中常用的数学模型有微分方程、差分方程和状态
方程;复数域中有传递函数、结构图;频域中有频率特。
本次课程设计研究的是位置随动系统的滞后校正,并对其进行分析。
关键字:随动系统性能分析
digest
Servo system is to point to the output of the system with a certain the precision and speed of tracking input of the automatic control system, and is the input of random, unpredictable. In many cases, servo system special was charged with volume is mechanical displacement control system than also. Control the development of technology, make servo systems have been widely used.
Position servo system is feedback control system, is the closed-loop control and speed regulation system for the quantitative value is constant, want to output quantity can stable, so the anti-interference ability of the system often become very important. And with the position of the position servo system instructions are often changes, requirement output accurate quantitative change to follow, the response of the output, flexibility and accuracy position servo system became the main features. In short, speed regulation system in dynamic index to anti-jamming performance is given priority to, servo system dynamic index to follow performance primarily.
In the control system of the analysis and design, the first to establish the mathematical model of the system. The mathematical model of the control system is to describe the system internal parameters (or variables) of the relationship between the mathematical expressions. In automatic control theory, the mathematical model has a variety of forms. Commonly used in time domain of mathematical model of the ordinary differential equations, difference equation and state equation; Plural domain transfer function, structure have; A frequency characteristics in the frequency domain.
This course of study is designed with the position of the lag of actuator system
calibration, and carries on the analysis.
Keywords: servo system performance analysis
目录
一、系统说明
1.1系统原理 (6)
1.2各环节性能、功能性说明 (7)
1.3设计指标 (9)
二、系统建模
2.1位置随动系统的结构框图 (9)
2.2位置随动系统的信号流图 (9)
2.3系统开环及其闭环传递函数的计算 (10)
三、系统分析
3.1原系统的根轨迹图 (11)
四、系统综合
4.1利用期望值绘制bode图 (12)
4.2设计校正规律和校正装置 (13)
五、系统物理模拟图 (16)
六、设计小结 (17)
参考文献 (19)
一、系统说明(概述)
1.1设计目的:
(1)掌握自动控制原理课程中所学的理论知识;
( 2) 掌握反馈系统的基本理论和方法,对工程实际系统进行全面分析和综合; ( 3)掌握控制系统的设计和校正方法; ( 5)提高分析问题和解决问题的能力。
1.2系统原理(简介)
1.2.1位置随动系统的基本原理图如下图1-1所示: εk u a u
BST BSR
1θ 2θ n
图1-1 位置随动系统的原理图 减速器 1.2.2位置随动系统工作原理:
位置随动系统通常由测量元件、放大元件、伺服电动机、测速发电机、齿
轮系及绳轮等基本环节组成,它通常采用负反馈控制理论进行工作,其原理如图1-1所示。
在图1-1中,测速元件作为电路器r R 和C R 组成的桥式测量电路。负载就固定在电位器C R 的滑臂上,因此电位器C R 的输出电压C U 和输出位移成正比。当输入位移变化时,在电桥的两端得到偏差电压C r U U U -=? ,经放大器放大后驱动伺服电机,并通过齿轮系带动负载转动,使偏差减小。当偏差0=?U 时,电动机停止转动,负载停止移动。此时L δδ=,表明输出位移与输入位移相对应。测速发电机反馈与电动机速度成正比,用以增加阻尼,改善系统。
1.3各环节的性能、功能特性说明
1.3.1自整角机:
作为常用的位置检测装置,将角位移或者直线位移转换成模拟电压信号的幅值或相位。自整角机作为角位移传感器,在位置随动系统中是成对使用的。与指令轴相连的是发送机,与系统输出轴相连的是接收机。
相敏
电流
功率放大
SM
TG
负载
))()(()(21t t k t u θθε-==)(t k θε? (1-1) 这里)(t θ?=)(1t θ-)(2t θ。在零初始条件下,对上式求拉普拉斯变换,课求得电位器的传递函数。则其传递函数如下式所示:
)(s G =)(/)(s s U θ?=εk (1-2)
1θ u
2θ
图1-2自整角机
1.3.2 功率放大器: )(t u a =a k 1u
由于运算放大器具有输入阻抗很大,输出阻抗小的特点,在工程上被广泛用来作信号放大器,其输出电压与输入电压成正比,传递函数为:
)(s G =)(s U a /)(1s U =a k (1-3)
式中参数)(s U a 为输出电压,)(1s U 为输入电压,a k 为放大倍数。功率放
大器结构图可用图1.3表示:
)(1s U
)(s U a
图1.3功率放大器
1.3.3 两相伺服电动机: 列出其工作方程如下:
22
()()
()m m m m a d t d t T k u t dt dt
θθ+= (1-4) 根据(1-4)对两边进行拉普拉斯变换,可以求得其传递函数:
)(s G =m k /(m ST +1)S (1-5)
因此可以得到伺服电机的结构图如下:
a
k
εk
a u m θ
图1-4两相伺服电机 1.3.4 测速发电机:
测速发电机的输出电压t u 与其转速ω成正比,即有:
t u =t k ω (1-6) 于是可得测速发电机的微分方程:
t u =t k dt
d θ
(1-7)
经过拉普拉斯变换,可得传递函数:
)(s G =
)
()
(s U s t θ (1-8)
测速发电机结构图如图1-5: m θ t u
图1-5直流测速电动机
1.3.5 减速器:
)(2t θ=i )(t m θ (1-9) 拉普拉斯变换为:
)(2s θ=i )(s m θ (1-10)
传递函数为:
)(s G =
)
()
(2s s m θθ (1-11) 式中i 为减速比。
由此可得到系统方框图如下图1-6所示: m θ 2θ
图1-6 减速器
1/i
s k t
)1(+s T s K
m m
1.4设计基本要求
(1)要求输出等于给定输入所要求的期望输出值。 (2)要求输出尽量不受扰动的影响。
(3)衡量一个系统是否完成以上两点,把要求划为三大性能指标来评价: 稳、快、准。
二、系统建模
2.1位置随动系统的结构框图
将一中各环节结构图整合,构成系统模型的框图结构:
-
1θ - 2θ u m θ
图1-7结构框图 2.2位置随动系统的信号流图
根据上述系统方框图,选定适当的节点,将方框图中的环节改成系统信号流,
图中方向线上的乘增益环节,可以将系统方框图改画成信号流图。因此,可以绘制出气信号流图如下图1-8所示:
1θ εk u a k a u )
1(+s T s k m m m θ i 1
2θ
s k t - -1
图1-8位置随动系统的信号流图 2.3各部分元件传递函数
(1) 电桥)(1s G =
)
()
(s s u εεθ=εk ①
εk
a k
)
1(+s T s k
m m 1/i s k t
(2) 放大器)(2s G =
)
()
(s u s u a = a k ② (3) 测速机)(3s G =
)()
(s s u m t θ=t
k s ③ (4) 电机)(3s G =
)()(s u s a m θ=
)
1(+s T s k m m
④
其中 ε
C C f R J R T m m a m
a m +=
是电动机机电时间常数;
ε
C C f R C K m m a m
m
+是电动机传递系数
(5)减速器 )(5s G =
)()(2s s m θθ=i
1
⑤
2.4、系统开环及其闭环传递函数的计算
由系统机构图可写出开环传递函数。根据计算和简化可得到系统的开环传递函数。也可以根据梅逊增益公式,利用信号流图来计算其开环传递函数,在这里就不分别介绍其求法了。
因此,求得系统的开环传递函数如下所示:
)(0s G =i
k k k m a 1
ε/[m T s 2+(1+m t a k k k )s ] (1-12)
根据开环传递函数与闭环传递函数的关系,可以通过开环传递函数求得闭环传递函数。求得位置随动系统的闭环传递函数如下:
)(s G =)(0s G /[1+)(0s G ]
)(s G =i k k k m a 1ε/[m T s 2+(1+m t a k k k )s +i
k k k m a 1
ε] (1-13)
题中所给的各项参数为:放大器增益为Ka=15,电桥增益6K ε=,测速电机增益t k =2,Ra=7Ω,La=10mH,J=0.005kg.m/s 2,J L =0.03kg.m/s 2,f L =0.08,C e =1,Cm=3,f=0.1,b k =0.2,i=0.02,将参数带入到(1-12)、(1-13)分别得到:
)(0s G =(15*6*0.84*50)/[0.0592s +26.28s]
≈3792/(0.0592s +26.28s ) (1-14)
《编译原理》课程设计大纲 课程编号: 课程名称:编译原理/Compiler Principles 周数/学分:1周/1学分 先修课程:高级程序设计语言、汇编语言、离散数学、数据结构 适用专业:计算机科学与技术专业、软件工程专业 开课学院,系或教研室:计算机科学与技术学院 一、课程设计的目的 课程设计是对学生的一种全面综合训练,是与课堂听讲、自学和练习相辅相成的必不可少的一个教学环节。通常,设计题中的问题比平时的练习题要复杂,也更接近实际。编译原理这门课程安排的课程设计的目的是旨在要求学生进一步巩固课堂上所学的理论知识,深化理解和灵活掌握教学内容,选择合适的数据逻辑结构表示问题,然后编制算法和程序完成设计要求,从而进一步培养学生独立思考问题、分析问题、解决实际问题的动手能力。 要求学生在上机前应认真做好各种准备工作,熟悉机器的操作系统和语言的集成环境,独立完成算法编制和程序代码的编写。 设计时间: 开发工具: (1) DOS环境下使用Turbo C; (2) Windows环境下使用Visual C++ 。 (3) 其它熟悉语言。 二、课程设计的内容和要求 设计题一:算术表达式的语法分析及语义分析程序设计。 1.目的
通过设计、编制、调试一个算术表达式的语法及语义分析程序,加深对语法及语义分析原理的理解,并实现词法分析程序对单词序列的词 法检查和分析。 2.设计内容及要求: 算术表达式的文法: 〈无符号整数〉∷= 〈数字〉{〈数字〉} 〈标志符〉∷= 〈字母〉{〈字母〉|〈数字〉} 〈表达式〉∷= [+|-]〈项〉{〈加法运算符〉〈项〉} 〈项〉∷= 〈因子〉{〈乘法运算符〉〈因子〉} 〈因子〉∷= 〈标志符〉|〈无符号整数〉|‘(’〈表达式〉‘)’ 〈加法运算符〉∷= +|- 〈乘法运算符〉∷= *|/ (1) 分别选择递归下降法、算符优先分析法(或简单优 先法)完成以上任务,中间代码选用逆波兰式。 (2) 分别选择LL(1)、LR法完成以上任务,中间代码选 用四元式。 (3) 写出算术表达式的符合分析方法要求的文法,给出 分析方法的思想,完成分析程序设计。 (4) 编制好分析程序后,设计若干用例,上机测试并通 过所设计的分析程序。 设计题二:简单计算器的设计 1.目的 通过设计、编制、调试一个简单计算器程序,加深对语法及语 义分析原理的理解,并实现词法分析程序对单词序列的词法检 查和分析。 2.设计内容及要求 算术表达式的文法:
课程设计任务书 学生姓名: 专业班级: 指导教师: 工作单位: 题 目: 位置随动系统建模与时域特性分析 初始条件: 图示为一位置随动系统,测速发电机TG 与伺服电机SM 共轴,右边的电位器与负载共轴。放大器增益为Ka=40,电桥增益5K ε=,测速电机增益2t k =,Ra=6Ω,La=12mH ,J=0.006kg.m 2,C e =Cm=0.4N ?m/A ,f=0.2N ?m ?s ,i=0.1。其中,J 为折算到电机轴上的转动惯量,f 为折算到电机轴上的粘性摩擦系数,i 为减速比。 要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) (1) 求出系统各部分传递函数,画出系统结构图、信号流图,并求出闭环传递函数; (2) 当Ka 由0到∞变化时,用Matlab 画出其根轨迹。 (3) Ka =10时,用Matlab 画求出此时的单位阶跃响应曲线、求出超调量、峰值 时间、调节时间及稳态误差。 (4) 求出阻尼比为0.7时的Ka ,求出各种性能指标与前面的结果进行对比分析。 (5) 对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析计算的过 程,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处
标准书写。时间安排:
指导教师签名:年月日系主任(或责任教师)签名:年月日
目录 1 系统建模及分析 0 1.1 各部分传递函数 0 1.1.1 电位器传感部分 ...................................................................................................... 0 1.1.2 放大器部分 .............................................................................................................. 1 1.1.3 电动机部分 .............................................................................................................. 1 1.1.4 测速发电机部分 ...................................................................................................... 2 1.1.5 减速器部分 .............................................................................................................. 2 1.2 位置随动系统建模 . (3) 1.2.1 结构图 ...................................................................................................................... 3 1.2.2 信号流图 .................................................................................................................. 3 1.3 开闭环传递函数 .. (3) 1.3.1 开环传递函数 .......................................................................................................... 3 1.3.2 闭环传递函数 . (4) 2 绘制根轨迹曲线 ...................................................................................................... 4 3 10 a K 时系统各项性能指标 .. (5) 3.1 单位阶跃响应曲线 ............................................................................................................. 6 3.2 各项性能指标计算值 (6) 4系统阻尼比为0.7时各种性能指标 (7) 4.1阻尼比为0.7时a K 值的计算 .......................................................................................... 7 4.2 性能指标对比 . (9) 5 设计心得体会 ........................................................................................................ 10 参考文献 (11)
摘要 随动系统是指系统的输出以一定的精度和速度跟踪输入的自动控制系统,并且输入量是随机的,不可预知的,主要解决有一定精度的位置跟随问题,如数控机床的刀具给进和工作台的定位控制,工业机器人的工作动作,导弹制导、火炮瞄准等。在现代计算机集成制造系统(CIMC)、柔性制造系统(FMS)等领域,位置随动系统得到越来越广泛的应用。 位置随动系统要求输出量准确跟随给定量的变化,输出响应的快速性、灵活性和准确性为位置随动系统的主要特征。 本次课程设计研究的是位置随动系统的超前校正,并对其进行分析。 关键词:随动系统超前校正相角裕度
目录 1 位置随动系统原理 (1) 1.1 位置随动系统原理图 (1) 1.2 各部分传递函数 (1) 1.3 位置随动系统结构框图 (4) 1.4 位置随动系统的信号流图 (4) 1.5 相关函数的计算 (4) 1.6 对系统进行MATLAB仿真 (5) 2 系统超前校正 (6) 2.1 校正网络设计 (6) 2.2 对校正后的系统进行Matlab仿真 (8) 3 对校正前后装置进行比较 (9) 3.1 频域分析 (9) 3.2 时域分析 (9) 4 总结及体会 (10) 参考文献 (12)
位置随动系统的超前校正 1 位置随动系统原理 1.1 位置随动系统原理图 图1-1 位置随动系统原理图 系统工作原理: 位置随动系统通常由测量元件、放大元件、伺服电动机、测速发电机、齿轮系及绳轮等组成,采用负反馈控制原理工作,其原理图如图1-1所示。 在图1-1中测量元件为由电位器Rr 和Rc 组成的桥式测量电路。负载固定在电位器Rc 的滑臂上,因此电位器Rc 的输出电压Uc 和输出位移成正比。当输入位移变化时,在电桥的两端得到偏差电压ΔU=Ur-Uc ,经放大器放大后驱动伺服电机,并通过齿轮系带动负载移动,使偏差减小。当偏差ΔU=0时,电动机停止转动,负载停止移动。此时δ=δL ,表明输出位移与输入位移相对应。测速发电机反馈与电动机速度成正比,用以增加阻尼,改善系统性能。 1.2 各部分传递函数 (1)自整角机: 作为常用的位置检测装置,将角位移或者直线位移转换成模拟电压信号的幅值或相位。自整角机作为角位移传感器,在位置随动系统中是成对使用的。与指令轴相连的是发送机,与系统输出轴相连的是接收机。 12()(()())()u t K t t K t εεθθθ=-=? (1-1) 零初始条件下,对上式求拉普拉斯变换,可求得电位器的传递函数为
位置随动系统
1位置随动系统的结构与工作原理 1.1 位置随动系统的结构组成 位置随动系统的原理图如图1-1。该系统的作用是使负载J(工作机械)的角位移随给定角度的变化而变化,即要求被控量复现控制量。系统的控制任务是使工作机械随指令机构同步转动即实现:Q(c)=Q(r) 图1-1 位置随动系统原理图Z1—电动机,Z2—减速器,J—工作机械 系统系统主要由以下部件组成:系统中手柄是给定元件,手柄角位移Qr是给定值(参考输入量),工作机械是被控对象,工作机械的角位移Qc是被控量(系统输出量),电桥电路是测量和比较元件,它测量出系统输入量和系统输出量的跟踪偏差(Qr –Qc)并转换为电压信号Us,该信号经可控硅装置放大后驱动电动机,而电动机和减速器组成执行机构。 1.2 系统的工作原理 控制系统的任务是控制工作机械的角位移Qc跟踪输入手柄的角位移Qr。如图1-1,当工作机械的转角Qc与手柄的转角Qr一致时,两个环形电位器组成的桥式电路处于平衡状态。其输出电压Us=0,电动机不动,系统处于平衡状态。当手柄转角Qr发生变化时,若工作机械仍处于原来的位置不变,则电桥输出电压Us不等于0,此电压信号经放大后驱动电动机转动,并经减速器带动工作机械使角位移Qc向Qr变化的方向转动,并
逐渐使Qr和Qc的偏差减小。当Qc=Qr时,电桥的输出电压为0,电机停转,系统达到新的平衡状态。当Qr 任意变化时,控制系统均能保证Qc 跟随Qr任意变化,从而实现角位移的跟踪目的。 该系统的特点:1、无论是由干扰造成的,还是由结构参数的变化引起的,只要被控量出现偏差,系统则自动纠偏。精度高。 2 、结构简单,稳定性较高,实现较容易。 2系统的分析与设计 2.1 位置随动系统方块图 根据系统的结构组成和工作原理可以画出系统的原理方块图,如图2-1。可以看出,系统是一个具有负反馈的闭环控制系统。 R C 给定电放大器电动机减速器负载 — 反馈电位 图2-1位置随动控制系统方块图 2.2 系统数学模型的建立 该系统各部分微分方程经拉氏变换后的关系式如(2-1): (2-1)(a) (2-1)(b) (2-1)(c) (2-1)(d) (2-1)(e) (2-1)(f) (2-1)(g) (2-1)(h) 根据各个环节结构图及其传函写出整个系统的结构图,如图2-2所示。
编译原理课程设计报告 课题名称: C-语言编译器设计(scanner和parser) 提交文档学生姓名: 提交文档学生学号: 同组成员名单:无 指导教师姓名:金军 指导教师评阅成绩: 指导教师评阅意见: . . 提交报告时间: 2011年 6 月 17 日
1.课程设计目标 设计C-Minus编译器分为scanner和parser两个部分。scanner主要作用是对目标代码进行扫描,列出关键字,变量等内容;parser主要对语法进行分析并生成语法树。 2.分析与设计 ●实现方法:代码用C语言编译而成。其中scanner为手工实现,主要采用switch-case结构实现 状态转换;parser部分采用递归下降分析方法实现。 ●扫描器:C-的词法如下: 1、语言的关键字:i f el se i nt return void while 2、专用符号:+ - * /< <= > >= == != =; , ( ) [ ] { } /* */ 3、其他标记是变量(ID)和数字(NUM),通过下列正则表达式定义: ID = letter letter* NUM = di git digi t* letter = a|..|z|A|..|Z digi t = 0|..|9 4、空格由空白、换行符和制表符组成。空格通常被忽略,除了它必须分开ID、NUM关键字 5. 注释用通常的C语言符号/ * . . . * /围起来。注释可以放在任何空白出现的位置(即注释不能放在 标记内)上,且可以超过一行。注释不能嵌套 其DFA图如下:
分析器:以下为C-的语法规则BNF:
第一章位置随动系统的概述 令狐文艳 1.1 位置随动系统的概念 位置随动系统也称伺服系统,是输出量对于给定输入量的跟踪系统,它实现的是执行机构对于位置指令的准确跟踪。位置随动系统的被控量(输出量)是负载机械空间位置的线位移和角位移,当位置给定量(输入量)作任意变化时,该系统的主要任务是使输出量快速而准确地复现给定量的变化,所以位置随动系统必定是一个反馈控制系统。 位置随动系统是应用非常广泛的一类工程控制系统。它属于自动控制系统中的一类反馈闭环控制系统。随着科学技术的发展,在实际中位置随动系统的应用领域非常广泛。例如,数控机床的定位控制和加工轨迹控制,船舵的自动操纵,火炮方位的自动跟踪,宇航设备的自动驾驶,机器人的动作控制等等。随着机电一体化技术的发展,位置随动系统已成为现代工业、国防和高科技领域中不可缺少的设备,是电力拖动自动控制系统的一个重要分支。 1.2位置随动系统的特点及品质指标 位置随动系统与拖动控制系统相比都是闭环反馈控制系统,即通过对输出量和给定量的比较,组成闭环控制,这两个系统的控制原理是相同的。对于拖动调速系统而言,给定量是恒值,要求系统维持输出量恒定,所以抗扰动性能成为主要技术指标。对于随动系统而言,给定量即位置指令是经常变化的,是一个随机变量,要求输出量准确跟随给定量的变化,因而跟随性能指标即系统输出响应的快速性、灵敏性与准确性成为它的主要性能指标。位置随动系统需要实现位置反馈,所以系统结构上必定要有位置环。位置环是随动系统重要的组成部分,位置随动系统的基本特征体现在位置环上。根据给定信号与位置检测反馈信号综合比较的不同原理,位置随动系统分为模拟与数字式两类。总结后可得位置随动系统的主要特征如下:
第一章位置随动系统的概述 1.1 位置随动系统的概念 位置随动系统也称伺服系统,是输出量对于给定输入量的跟踪系统,它实现的是执行机构对于位置指令的准确跟踪。位置随动系统的被控量(输出量)是负载机械空间位置的线位移和角位移,当位置给定量(输入量)作任意变化时,该系统的主要任务是使输出量快速而准确地复现给定量的变化,所以位置随动系统必定是一个反馈控制系统。 位置随动系统是应用非常广泛的一类工程控制系统。它属于自动控制系统中的一类反馈闭环控制系统。随着科学技术的发展,在实际中位置随动系统的应用领域非常广泛。例如,数控机床的定位控制和加工轨迹控制,船舵的自动操纵,火炮方位的自动跟踪,宇航设备的自动驾驶,机器人的动作控制等等。随着机电一体化技术的发展,位置随动系统已成为现代工业、国防和高科技领域中不可缺少的设备,是电力拖动自动控制系统的一个重要分支。 1.2 位置随动系统的特点及品质指标 位置随动系统与拖动控制系统相比都是闭环反馈控制系统,即通过对输出量和给定量的比较,组成闭环控制,这两个系统的控制原理是相同的。对于拖动调速系统而言,给定量是恒值,要求系统维持输出量恒定,所以抗扰动性能成为主要技术指标。对于随动系统而言,给定量即位置指令是经常变化的,是一个随机变量,要求输出量准确跟随给定量的变化,因而跟随性能指标即系统输出响应的快速性、灵敏性与准确性成为它的主要性能指标。位置随动系统需要实现位置反馈,所以系统结构上必定要有位置环。位置环是随动系统重要的组成部分,位置随动系统的基本特征体现在位置环上。根据给定信号与位置检测反馈信号综合比较的不同原理,位置随动系统分为模拟与数字式两类。总结后可得位置随动系统的主要特征如下: 1.位置随动系统的主要功能是使输出位移快速而准确地复现给定位移。 2.必须具备一定精度的位置传感器,能准确地给出反映位移误差的电信号。 3.电压和功率放大器以及拖动系统都必须是可逆的。 4.控制系统应能满足稳态精度和动态快速响应的要求,其中快速响应中,更强调快速跟随性能。 1.3 位置随动系统的基本组成
在专业核心课程设计、建设和教学实施过程中,贯彻以下教育理念: 终身学习的教育观:现代教育主要是培养学生终身发展的四项基础能力:学会认知、学会做事、学会共同生活、学会生存。教师必须转变角色,从传授者变为引导者,改变以“教”为中心的传统的教学方法,转为以“学”为中心,学生自主学习;重视学生的学习权,使“教学”向“学习”转换;把学生变成自己教育自己的主体,受教育的人必须成为教育他自己的人。 多元智能的学生观:高职学生具有形象思维的智能结构特点,适宜以实践知识为学习起点的培养模式;在教学中,因材施教,按学生的特点,发掘学潜能,发展个性,学习实践知识和必需够用的理论知识;在课程学习过程中不要让学生再遭遇智慧关闭的经历,多让学生体验智慧开启和增强自信的经历,要把我们的教育从制造失败者的教育变成塑造成功者的教育。 建构主义的学习观:学生的知识是在一定的情境中通过与他人的互动,利用必要的学习资源,主动建构获得的。灌输式教学限制学生创造性思维的发展,剥夺了学生建构知识和理解自身的机会;学生通过探究和主动学习,才能达到最好的学习效果。专兼职教师要为学生创设适宜的学习情境,灵活运用多种教学方法,提供丰富的学习资源,使学生能主动地建构他们自己的经验和知识。 能力本位的质量观:课程的目标是培养完成综合性工作任务的职业能力。通过工作过程系统化的课程学习,学生在个人实践经验的基础上建构专业系统化知识,完成从初学者到高素质技术技能专门人才的职业能力发展。学生不仅要获得专业的职业技能、职业资格和必备的专业知识,更要获得自我发展的内化的职业能力,有能力在职业生涯中不断获得新的发展。 过程导向的课程观:课程以理论和实践一体化的工作过程为导向,构建“工作过程完整”而不是“学科完整”的学习过程。从职业工作出发选择课程内容,并按照职业能力从易到难的顺序安排教学;课程内容首先强调获取完成工作任务的过程性知识,解决“怎么做”(经验)和“怎么做更好”(策略)的问题,然后是适度够用的陈述性知识(理论知识)。 行动导向的教学观:强调“为了行动而学习、通过行动来学习”,工作过程与学习过程相统一。教师是课程学习过程的组织者、咨询者和协调人,学生是行动主体,教学遵循“资讯、计划、决策、实施、检查、评估”的完整“行动”过程,在教学中专兼职教师与学生互动,让学生通过“独立地获取信息、制订和实施计划、检查评价成果”,建构真正属于自己的经验和知识体系。
编译原理课程设计报告 课题名称:C- Minus词法分析和语法分析设计 提交文档学生姓名:X X X 提交文档学生学号:XXXXXXXXXX 同组成员名单:X X X 指导教师姓名:X X 指导教师评阅成绩: 指导教师评阅意见: . . 提交报告时间:2015年6月10日
1.课程设计目标 实验建立C-编译器。只含有扫描程序(scanner)和语法分析(parser)部分。 2.分析与设计 C-编译器设计的整体框架,本实验实现扫描处理和语法分析程序(图中粗黑部分)。 2.1 、扫描程序scanner部分 2.1.1系统设计思想 设计思想:根据DFA图用switch-case结构实现状态转换。 惯用词法:
①语言的关键字:else if int return void while ②专用符号:+ - * / < <= > >= == != = ; , ( ) [ ] { } /* */ ③其他标记是ID和NUM,通过下列正则表达式定义: ID = letter letter* NUM = digit digit* letter = a|..|z|A|..|Z digit = 0|..|9 大写和小写字母是有区别的 ④空格由空白、换行符和制表符组成。空格通常被忽略,除了它必须分开ID、NUM 关键字。 ⑤注释用通常的C语言符号/ * . . . * /围起来。注释可以放在任何空白出现的位置(即注释不能放在标记内)上,且可以超过一行。注释不能嵌套 scanner的DFA
说明:当输入的字符使DFA到达接受状态的时候,则可以确定一个单词了。初始状态设置为START,当需要得到下一个token时,取得次token的第一个字符,并且按照DFA与对此字符的类型分析,转换状态。重复此步骤,直到DONE为止,输出token类型。当字符为“/”时,状态转换为SLAH再判断下一个字符,如果为“*”则继续转到INCOMMENT,最后以“*”时转到ENDCOMMENT状态,表明是注释,如果其他的则是字符停滞于当前字符,并且输出“/”。 2.1.2程序流程图
课程设计任务书 学生姓名: 专业班级: 指导教师: 工作单位: 自动化学院 题 目: 位置随动系统建模与分析 初始条件: 图示为一位置随动系统,放大器增益为8=a k ,电桥增益2=εk ,测速电机增 益15.0=t k V.s ,Ω=5.7a R ,La=14.25mH ,J=0.0006kg .m 2, C e =Cm=0.4N.m/A, f=0.2N.m.s, 减速比i=10 。 要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等 具体要求) 1、 求出系统各部分传递函数,画出系统结构图、信号流图,并求出闭环传递 函数; 2、 当Ka 由0到∞变化时,用Matlab 画出其根轨迹。 3、 Ka =10时,用Matlab 画出此时的单位阶跃响应曲线、求出超调量、超调 时间、 调节时间及稳态误差。 4、 求出阻尼比为0.7时的Ka ,求出此时的性能指标与前面的结果进行对比分 析。
时间安排: 指导教师签名:年月日系主任(或责任教师)签名:年月日
目录 1 位置随动系统原理 (3) 1.1 位置随动系统原理框图 (3) 1.2 元件结构图分析 (3) 1.3 位置随动系统各元件传递函数 (5) 1.4 位置随动系统的结构框图 (5) 1.5 位置随动系统的信号流图 (6) 1.6 相关函数的计算 (6) 2根轨迹曲线 (7) 2.1参数根轨迹转换 (7) 2.2绘制根轨迹 (7) 3单位阶跃响应分析 (8) 3.1单位阶跃响应曲线 (8) 3.2单位阶跃响应的时域分析 (9) 4系统性能对比分析 (11) 4.1 新系统性能指标计算 (11) 4.2 系统性能指标对比分析 (11) 5 总结体会 (12) 参考文献 (13)
课程设计任务书 题 目: 位置随动系统建模与分析 初始条件: 图示为一位置随动系统,放大器增益为Ka ,电桥增益2K ε=,测速电机增益0.15t k =V.s ,Ra=7.5Ω,La=14.25mH ,J=0.006kg.m 2 ,C e =Cm=0.4N.m/A,f=0.2N.m.s,减速比i=0.1 要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写 等具体要求) 1、 求出系统各部分传递函数,画出系统结构图、信号流图,并求出闭环传递 函数; 2、 当Ka 由0到∞变化时,用Matlab 画出其根轨迹。 3、 Ka =10时,用Matla 画求出此时的单位阶跃响应曲线、求出超调量、超 调时间、调节时间及稳态误差。 4、 求出阻尼比为0.7时的Ka ,求出各种性能指标与前面的结果进行对比分 析。 时间安排: 指导教师签名: 年 月 日 系主任(或责任教师)签名: 年 月 日 位置随动系统建模与分析
1 位置随动系统的建模 1.1 系统总体分析 1.1.1 系统概述 随动控制系统又名伺服控制系统。其参考输入是变化规律未知的任意时间函数。随动控制系统的任务是使被控量按同样规律变化并与输入信号的误差保持在规定范围内。这种系统在军事上应用最为普遍.如导弹发射架控制系统,雷达天线控制系统等。其特点是输入为未知。伺服驱动系统(Servo System)简称伺服系统,是一种以机械位置或角度作为控制对象的自动控制系统,例如数控机床等。使用在伺服系统中的驱动电机要求具有响应速度快、定位准确、转动惯量较大等特点,这类专用的电机称为伺服电机。当然,其基本工作原理和普通的交直流电机没有什么不同。该类电机的专用驱动单元称为伺服驱动单元,有时简称为伺服,一般其内部包括电流、速度和/或位置闭环。 1.1.2 系统基本原理分析 首先输入角度和输出角度通过圆形电位器将角位移量转换为电压量,通过两个电位器构成的电桥进行比较产生角度电压误差,这个角度电压误差反映了输入角度与输出角度的角度误差,测速发电机的输出电压与伺服电机的角速度ω成正比,测速发电机产生的电压与角度电压误差通过比较产生电压误差,将这个电压误差送给放大器,经过放大器放大之后用来驱动伺服电机。伺服电机的输出角度还要经过减速箱进行转速变换之后才是最终的输出角度。 1.1.2 系统基本原理框图 图1-1 系统基本原理框图 1.2 各部分传递函数 1.2.1 由双电位器构成电桥 电位器是一种把线性位移或角位移变换成电压量的装置,在控制系统中一对电位器可以构成误差检测器。 单个电位器的工作原理:单个电位器的电刷角位移与输出电压是线性正比
编译原理课程设计 自顶向下语法分析器 学院(系):计算机科学与技术学院学生姓名:xxxxxxxxx 学号:xxxxxxxxx 班级:电计1102 大连理工大学 Dalian University of Technology
目录
1 系统概论 语法分析是编译过程的核心部分。它的任务是在词法分析识别出单词符号串的基础上,分析并判定程序的语法结构是否符合语法规则。语法分析器在编译程序中的地位如图1所示: 图1 语法分析器在编译程序中的地位 语言的语法结构是用上下文无关文法描述的。因此,语法分析器的工作本质上就是按文法的产生式,识别输入符号串是否为一个句子。这里所说的输入串是指由单词符号(文法的终结符)组成的有限序列。对一个文法,当给你一串(终结)符号时,怎样知道它是不是该文法的一个句子呢?这就要判断,看是否能从文法的开始符号出发推导出这个输入串。或者,从概念上讲,就是要建立一棵与输入串相匹配的语法分析树。 自顶向下分析法就是语法分析办法中的一类。顾名思义,自顶向下就是从文法的开始符号出发,向下推导,推出句子。这种方法是带“回溯”的。 自顶向下分析的主旨是,对任何输入串,试图用一切可能的办法,从文法开始符号(根结)出发,自上而下地为输入串建立一棵语法树。或者说,为输入串寻找一个最左推导。这种分析过程本质上是一种试探过程,是反复使用不同产生式谋求匹配输入串的过程。 实现这种自顶向下的带回溯试探法的一个简单途径是让每个非终结符对应一个递归子程序。每个这种子程序可作为一个布尔过程。一旦发现它的某个候选与输入串相匹配,就用这个候选去扩展语法树,并返回“真”值;否则,保持原来的语法树和IP值不变,并返回“假”值。 2 需求分析 以前,人们对语法的分析都建立在人工的基础上,人工分析虽然能够做到侧类旁推,但终究人力有限,再精密的分析都会出现或多或少的错误。为减少因人为产生的错误,并加快
自动控制原理课程设计题目及要求 一、单位负反馈随动系统的开环传递函数为 1、画出未校正系统的Bode 图,分析系统是否稳定 2、画出未校正系统的根轨迹图,分析闭环系统是否稳定。 3、设计系统的串联校正装置,使系统达到下列指标 (1)静态速度误差系数K v ≥100s -1; (2)相位裕量γ≥30° (3)幅频特性曲线中穿越频率ωc ≥45rad/s 。 4、给出校正装置的传递函数。 5、分别画出校正前,校正后和校正装置的幅频特性图。计算校正后系统的穿越频率ωc 、相位裕量γ、相角穿越频率ωg 和幅值裕量K g 。 6、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。 7、应用所学的知识分析校正器对系统性能的影响(自由发挥)。 二、设单位负反馈随动系统固有部分的传递函数为 1、画出未校正系统的Bode 图,分析系统是否稳定。 2、画出未校正系统的根轨迹图,分析闭环系统是否稳定。 3、设计系统的串联校正装置,使系统达到下列指标: (1)静态速度误差系数K v ≥5s -1; (2)相位裕量γ≥40° (3)幅值裕量K g ≥10dB 。 4、给出校正装置的传递函数。 5、分别画出校正前,校正后和校正装置的幅频特性图。计算校正后系统的穿越频率ωc 、相位裕量γ、相角穿越频率ωg 和幅值裕量K g 。 6、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。 7、应用所学的知识分析校正器对系统性能的影响(自由发挥)。 三、设单位负反馈系统的开环传递函数为 ) 2(4 )(+= s s s G k 1、画出未校正系统的根轨迹图,分析系统是否稳定。 2、设计系统的串联校正装置,要求校正后的系统满足指标: 闭环系统主导极点满足ωn =4rad/s 和ξ=0.5。 3、给出校正装置的传递函数。 4、分别画出校正前,校正后和校正装置的幅频特性图。计算校正后系统的穿越频率ωc 、相位裕量γ、相角穿越频率ωg 和幅值裕量Kg 。 5、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。 6、应用所学的知识分析校正器对系统性能的影响(自由发挥)。 四、设单位负反馈系统的开环传递函数为 ) 2)(1(06 .1)(++= s s s s G k 1、画出未校正系统的根轨迹图,分析系统是否稳定。 2、设计系统的串联校正装置,要求校正后的系统满足指标: (1)静态速度误差系数K v =5s -1;
中文摘要:随动系统,通常也被称为伺服系统,是一种反馈控制系统。它是用来控制被控对象的某种状态,使被控对象的输出能自动、连续、精确地复现输入信号变化规律的一种控制系统,随动系统的控制对象通常为角度或机械位置,该系统最初用于船舶的操舵系统、火炮控制以及指挥仪中,后来慢慢推广到众多领域,尤其多见于自动车床、天线位置的控制还有导弹和飞船的制导等。如今随动系统的应用几乎扩展到了民用、工业、军事等各个领域,随着家用电器的普及和全自动化,它在生活中的应用也越来越广泛。而位置随动系统的被控量是位置,一般用线位移或角位移表示。当位置给定量作某种变化时,该系统的主要任务就是使输出位移快速而准确地复现给定量位移。
第一章绪论 1.1课题研究背景 1.1.1随动系统现状及历史 随动系统,通常也被称为伺服系统,是一种反馈控制系统。它是用来控制被控对象的某种状态,使被控对象的输出能自动、连续、精确地复现输入信号变化规律的一种控制系统,其衡量指标主要有超调量、稳态误差、峰值时间等时域指标以及相角域度、幅值域度、频带宽度等频域指标,其输入是一种变化规律未知的时间函数。随动系统中的驱动电机应该具有响应速度快、定位准确、转动惯量大等特点,这类专用的电机称为伺服电机。早在二十世纪三十年代,伺服机构这个词便进入人们的视线了。到二十世纪中期,在自动控制理论的发展下随动系统也得到了极大的发展,其应用领域进一步扩大。近几十年,伺服技术更是取得飞跃发展,其应用也迅速扩展到民用、工业和军事领域中。在冶金行业,它用于多种冶金炉的电极位置控制,机器的运行控制等;在运输行业中,水路陆路空中三方的运输工作也都用到了伺服系统,比如,飞机的驾驶,电力机车的调速,船舶的操舵等,一定程度上都实现了“自动化”控制;如今,军事领域也充分运用到了伺服系统,比如雷达天线的自动瞄准的跟踪控制,导弹和鱼雷的自动控制等等。另外,随着空调、洗衣机等各类家用电器在家庭中的普及,伺服系统的应用也走入到了我们的日常生活中。 1.1.2随动系统的应用 随动系统的控制对象通常为角度或机械位置,该系统最初用于船舶的操舵系统、火炮控制以及指挥仪中,后来慢慢推广到众多领域,尤其多见于自动车床、天线位置的控制还有导弹和飞船的制导等。如今随动系统的应用几乎扩展到了民用、工业、军事等各个领域,随着家用电器的普及和全自动化,它在生活中的应用也越来越广泛。 人们应用随动控制系统主要是为了达到下面几个目的: ⒈用较小的功率指令信号来控制很大功率的负载,比如火炮控制、船舵控制等。 2.在没有机械连接的情况下,利用输入轴控制远处的输出轴,从而实现远距离的同步传动控制。
编译原理: 编译原理是计算机专业的一门重要专业课,旨在介绍编译程序构造的一般原理和基本方法。内容包括语言和文法、词法分析、语法分析、语法制导翻译、中间代码生成、存储管理、代码优化和目标代码生成。编译原理是计算机专业设置的一门重要的专业课程。编译原理课程是计算机相关专业学生的必修课程和高等学校培养计算机专业人才的基础及核心课程,同时也是计算机专业课程中最难及最挑战学习能力的课程之一。编译原理课程内容主要是原理性质,高度抽象。 编译原理课程设计: 《编译原理课程设计》是2007年11月浙江大学出版社出版的图书,作者是冯雁、鲁东明、李莹。 内容简介: 本书围绕着编译技术的基本原理和方法,以模拟程序设计语言SPL的编译器的设计和实现为主线,结合词法分析、语法分析、语义分析、代码生成、代码优化、错误处理等各个基本模块,对原理和实现方法进行了详细分析。该编译器可接受SPL的程序,并将其翻译成汇编语言程序,最终实现汇编语言到8086/8088机器语言的翻译。本书为编译技术等相关课程的实验提供了参考。在附件中还提供了三类不同类型和难度的实验题,可供课程实验选择。 第1章引论: 1.1本书介绍 1.2SPL语言的特点及实验安排
1.2.1SPL语言的特点 1.2.2SPL语言编译器的主要结构1.2.3实验安排 1.3平台的选择和介绍 1.3.1LEX简介 1.3.2YACC简介 第2章词法分析: 2.1词法分析器的基本框架 2.2词法分析器的基本原理 2.2.1DFA的构造和实现 2.2.2词法分析的预处理 2.2.3实现词法分析器的注意要点2.3词法分析器的实现 2.3.1SPL语言单词属性字 2.3.2SPL词法分析器的输入和输出2.3.3SPL词法分析器的分析识别第3章语法分析: 3.1语法分析的基本框架 3.1.1上下文无关文法 3.1.2语法分析过程 3.1.3语法分析过程中的数据结构3.2语法分析的基本方法
一类位置随动系统的测速反馈控制 1位置随动系统原理 1.1位置随动系统工作原理 图1-1位置随动系统原理图 该系统为一自整角机位置随动系统,用一对自整角机作为位置检测元件,并形成比较电路。发送自整角机的转子与给定轴相连:接收自整角机的转子与负载轴(从动轴)相连。TX 与TR 组成角差测量线路。若发送自整角机的转子离开平衡位置转过一个角度r θ,则在接收自整角机的单相绕组转子的单相绕组上将感应出一个偏差电压e u ,它是一个振幅为em u 、频率与发送自整角机激励相同的交流调制电压。即sin e em u u t ω=?在一定范围内,em u 正比于r c θθ-,即[]em e r c u k θθ=-,所以可得[]sin e e r c u k t θθω=-这就是随动系统中接收自整角机所产生的偏差电压的表达式,它是一个振幅随偏差()r c θθ-的改变而改变的交流电压。因此,e u 经过交流放大器放大,放大后的交流信号作用在两相伺服电动机两端。电动机带动负载和接收自整角机的转子旋转,实现r c θθ=,以达到跟随的目的。为了使电动机转速恒定、平稳,引入了测速负反馈。 系统的被控对象是负载轴,被控量使负载轴转角c θ,电动机是执行机构,功率放大器器信号放大作用,调制器负责将交流调制为直流电供给直流测速发电机工作电压,测速电动机是检测反馈元件。 1.2单元电路模块分析 1.2.1自整角机
自整角机是常用的位置检测装置,将角位移或者直线位移转换成模拟电压信号的幅值或相位。自整角机作为角位移传感器,在位置随动系统中是成对使用的。与指令轴相连的是发送机,与系统输出轴相连的是接收机。则自整角机的表达式为 ()[()()]()r c u t K t t K t εεθθθ=-=? 在零初始条件下,拉氏变换为()()u s K s εθ=?,则自整角机的传递函数为 1()()() u s G s K s εθ==? 自整角机的结构图如图1-2所示 图1-2 自整角机 1.2.2功率放大器 由于运算放大器具有输入阻抗很大,输出阻抗小的特点,在工程上被广泛用来作信号放大器。其输出电压与输入电压成正比,即有 ()[()()]a a f u t K u t u t =- 在零初始条件下,拉氏变换为()[()()]()a a f a u s K u s u s K u s =-=??,则传递函数为 21()()() a a u s G s K u s == 式中()a u s 为输出电压,1()u s 为输入电压,a K 为放大倍数。 图1-3 功率放大器 1.2.3两相伺服电机
先简要分析一下语法分析的大致流程: 当有句子要进行处理时,首先要对其进行词法分析来分解出该句子中的每个符号,然后将该句子按照算符优先算法压入归约栈中,如果可以顺利归约,则说明这是一个合法的句子,否则该句子非法。 这里有一个需要考虑的地方,就是如何进行归约。由于文法已经给定,所以我们考虑设计一个文法表,文法表中的内容就是可归约串的种别码的顺序,比如v=E可以表示为9,1,13。这样的话当我们要进行一次归约时,只用按顺序存储最左素短语中符号的种别码,然后拿这个种别码序列与文法表进行匹配,就可知道当前归约需要执行哪些操作。 还有一点需要注意,就是如何对一个表达式进行求值。这里需要我们设计一个二元组的变量名表,这个变量名表可以根据变量的名称来返回变量的数据。变量名表的具体设计见详细设计部分。 由于是简化分析,所以这个程序只考虑整数的处理。 有了上面的分析,可以构造出算符优先分析算法的流程图,如下图所示。
详细设计 (1)词法分析部分 由于词法分析的内容在课程设计1中已经介绍,并且这次的状态转换图与课程设计1中的非常相似,所以这里就不过多介绍。(2)优先关系表 在程序中我们用一个二维数组priTable[][]来存储算符间的优先关系。priTable[a][b]=1表示a>b; 。priTable[a][b]=0表示a=b; 。priTable[a][b]=-1表示a 位置随动系统的超前 校正设计 学号: 课程设计 题目位置随动系统的超前校正设计 学院自动化学院 专业自动化专业 班级自动化****班 姓名*** 指导教师*** 2011 年12 月26 日 课程设计任务书 学生姓名: *** 专业班级: 自动化**** 指导教师: ** 工作单位: 自动化学院 题 目: 位置随动系统的超前校正设计 初始条件: 图示为一位置随动系统,测速发电机TG 与伺服电机SM 共轴,右边的电位器与负载共轴。放大器增益为Ka=40,电桥增益5K ε=,测速电机增益25.0=t k ,Ra=6Ω,La=12mH ,J=0.006kg.m 2,C e =Cm=0.3N m/A ,f=0.2N m s ,i=0.1。其中,J 为折算到电机轴上的转动惯量,f 为折算到电机轴上的粘性摩擦系数,i 为减速比。 要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) 1、 求出系统各部分传递函数,画出系统结构图、信号流图,并求出闭环传递函数; 2、 求出系统的截止频率、相角裕度和幅值裕度,并设计超前校正装置,使得系统的相角裕度增加12度; 3、 用Matlab 对校正前后的系统进行仿真分析,比较其时域响应曲线有何区别,并说明原因; 4、 对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析计算的过程,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处标准书写。 时间安排: 指导教师签名:年月日系主任(或责任教师)签名:年月日 随动系统是指系统的输出以一定的精度和速度跟踪输入的自动控制系统,并且输入量是随机的,不可预知的。控制技术的发展,使随动系统得到了广泛的应用。 位置随动系统是反馈控制系统,是闭环控制,调速系统的给定量是恒值,希望输出量能稳定,因此系统的抗干扰能力往往显得十分重要。而位置随动系统中的位置指令是经常变化的,要求输出量准确跟随给定量的变化,输出响应的快速性、灵活性和准确性成了位置随动系统的主要特征。简言之,调速系统的动态指标以抗干扰性能为主,随动系统的动态指标以跟随性能为主。 在控制系统的分析和设计中,首先要建立系统的数学模型。控制系统的数学模型是描述系统内部物理量(或变量)之间关系的数学表达式。在自动控制理论中,数学模型有多种形式。时域中常用的数学模型有微分方程、差分方程和状态方程;复数域中有传递函数、结构图;频域中有频率特性等。 本次课程设计研究的是位置随动系统的超前校正,并对其进行分析。最新位置随动系统的超前校正设计
相关主题
文本预览