雷达信号频率的测量讲解
- 格式:ppt
- 大小:1.87 MB
- 文档页数:168
雷达测距的基本方法嘿,你问雷达测距的基本方法呀,那咱就来唠唠呗。
雷达测距呢,简单说就是通过雷达来测量目标和自己之间的距离。
其中一个常见的方法就是脉冲法。
雷达会发射出一个脉冲信号,这个信号就像你朝远处扔出去的一个小飞镖一样,“嗖”地一下就飞出去啦。
然后这个信号碰到目标之后呢,就会像弹弹球一样被弹回来,雷达再接收这个反射回来的信号。
通过计算发射信号和接收信号之间的时间差,就可以知道信号跑了一个来回用了多长时间。
就好比你知道自己扔出去的小飞镖飞出去再飞回来用了多久,然后根据信号传播的速度,就能算出你和目标之间的距离啦。
比如说信号传播速度是每秒30万千米(当然实际速度差不多是这样啦),如果发射和接收信号的时间差是0.000001秒,那距离就是30万千米乘以0.000001秒再除以2(因为是一个来回嘛),算出来就是150米。
还有一种方法是调频连续波法。
这个就有点像你和小伙伴玩的那种你追我赶的游戏。
雷达发射的信号频率会不断变化,就像你一会儿跑得快一会儿跑得慢一样。
当这个信号碰到目标再反射回来的时候,频率就和发射的时候不一样啦。
通过测量这个频率的变化,就能算出目标的距离。
比如说发射的信号频率开始是1000赫兹,回来的时候变成了1010赫兹,根据频率变化和一些公式,就能知道距离大概是多少啦。
再比如说相位法。
想象一下你和目标之间有一根绳子,雷达发射的信号就像沿着这根绳子传播的波浪一样。
当信号反射回来的时候,它的相位会发生变化,就好像波浪在绳子上转了个圈回来有点不一样了。
通过测量这个相位的变化,也能算出距离哦。
比如说发射的信号相位是0度,回来变成了30度,根据相位差和相关的知识,就能算出距离有多远啦。
你看,雷达测距其实就是这么个有趣的事儿,通过各种巧妙的方法来知道目标离我们有多远。
就像我们在生活中想要知道一个东西离我们有多近或者多远,会用各种办法去判断一样,雷达也是用它自己的“小窍门”来完成这个任务的哦。
希望你能明白我说的这些啦,哈哈。
雷达天线的工作频率-回复雷达天线是雷达系统中的核心部件之一,负责接收和发射雷达信号。
雷达天线的工作频率是指它能够接收和发射的电磁波信号的频率范围。
本文将逐步回答雷达天线的工作频率问题,以帮助读者更好地理解雷达系统的工作原理。
1. 雷达系统的基本原理雷达系统是一种利用电磁波进行探测、测量和跟踪目标的无线电波测距与测速设备。
它通过发射电磁波并接收被目标反射回来的波,根据反射信号的时间和频率特征来确定目标的位置、速度和其他相关信息。
2. 雷达信号的特征雷达信号具有一定的频率、波长和功率。
频率指电磁波信号的振荡次数,单位为赫兹(Hz);波长指电磁波信号的周期或振动长度,单位为米(m);功率指电磁波信号的能量大小。
3. 雷达天线的工作频率雷达天线的工作频率是指它能够接收和发射的电磁波信号的频率范围。
具体的工作频率会根据雷达系统的用途和要求而有所不同。
4. 工作频率的选择原则(1)天线尺寸:天线的尺寸与工作频率存在一定的关系。
一般来说,天线的尺寸和频率呈反比关系,即频率较高时天线较小,频率较低时天线较大。
这是因为天线尺寸必须与电磁波的波长相匹配,以实现最佳的辐射和接收效果。
(2)目标距离:目标距离也会影响工作频率的选择。
在较长距离上探测目标时,较低的工作频率有利于提高信号的传输和接收能力;而在较近距离上探测目标时,较高的工作频率可以获得更精确的测量结果。
(3)环境影响:工作频率的选择还需要考虑环境因素。
雷达信号在传播过程中会受到大气层、地表、建筑物等的干扰和衰减。
不同频率的电磁波在这些介质中传播的特性不同,选择合适的工作频率可以降低干扰和衰减的影响,提高雷达系统的性能。
5. 雷达天线的工作频率范围雷达天线的工作频率范围通常涵盖一个频带,可以是单一的频率或一段连续的频率。
根据其工作频率范围,雷达天线可以分为以下几类:(1)低频雷达天线:工作频率范围通常在几千赫兹(kHz)到几百兆赫兹(MHz)之间,适用于长距离目标探测,如地面监测、气象观测等。
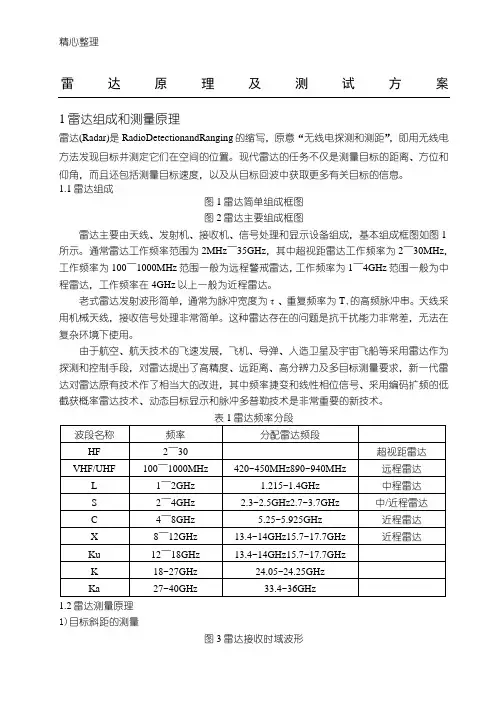
雷达原理及测试方案1雷达组成和测量原理雷达(Radar)是RadioDetectionandRanging的缩写,原意“无线电探测和测距”,即用无线电方法发现目标并测定它们在空间的位置。
现代雷达的任务不仅是测量目标的距离、方位和仰角,而且还包括测量目标速度,以及从目标回波中获取更多有关目标的信息。
1.1雷达组成1.2雷达测量原理1)目标斜距的测量图3雷达接收时域波形在雷达系统测试中需要测试雷达到目标的距离和目标速度,雷达到目标的距离是由电磁波从发射到接收所需的时间来确定,雷达接收波形参见图3,雷达到达目标的距离R为:R=0.5×c×tr式(2)式中c=3×108m/s,tr为来回传播时间2)目标角位置的测量目标角指方位角或仰角,这两个角位置基本上是利用天线的方向性来实现。
雷达天线将电磁能汇集在窄波束内,当天线对准目标时,回波信号最强。
回波的角位置还可以用测量两个分离接收天线收到信号的相位差来决定。
3)4)max t e min式中Pt 为发射机功率,G为天线增益,Ae为天线有效接收面积,σ为雷达回波功率截面积,Smin为雷达最小可探测信号。
雷达方程可以正确反映雷达各参数对其检测能力影响的程度,不能充分反映实际雷达的性能。
因为许多影响作用距离的环境和实际因素在方程中没有包括。
1.4雷达分类军用雷达主要分类:不能满足复杂雷达信号测试需求。
更为重要的是,雷达在实际工作过程中接收到的信号并不是纯净的发射回波,它包含各种杂波和多普勒效应,特别是在地形复杂或海面各种时,接收机接收到的杂波比需要探测的物体回波大的多,而这一切目前没有通用测量设备来生成雷达接收机所接收到的实际波形。
因此各个雷达研制单位投入大量人力、物力研制各种雷达模拟器,但这些模拟器往往受各种设计因素影响,只是实际雷达波形的简化,并只考虑到典型的应用,对复杂的应用环境无法模拟。
这样无法及时发现雷达研制和使用过程中问题和隐患。
雷达信号测试参数指标雷达信号测试是对雷达系统的各项参数进行评估和验证的重要手段。
通过对雷达信号的测试,可以了解雷达系统的性能表现,指导系统的优化和改进。
本文将从不同角度介绍雷达信号测试的参数指标。
1. 信号强度:信号强度是指雷达系统接收到的信号的功率大小。
信号强度的测量可以通过接收到的信号的电压或功率进行评估。
信号强度的大小直接影响雷达系统的探测能力和探测距离,强的信号可以提供更远的探测距离。
2. 信噪比:信噪比是指雷达系统中信号与噪声的功率比。
信噪比的高低直接影响雷达系统的探测能力和探测精度。
信噪比越高,系统的性能越好。
因此,对于雷达信号的测试中,需要评估信噪比的大小。
3. 雷达图像质量:雷达图像质量是指雷达系统生成的图像的清晰度和准确度。
图像质量的好坏直接影响着雷达系统的目标识别和跟踪能力。
在雷达信号测试中,需要评估雷达图像的分辨率、噪声水平、图像畸变等指标。
4. 探测概率和虚警概率:探测概率和虚警概率是评估雷达系统探测性能的重要指标。
探测概率是指雷达系统正确地探测到目标的概率,虚警概率是指雷达系统错误地将噪声或杂波识别为目标的概率。
探测概率和虚警概率的大小直接影响着雷达系统的可靠性和准确性。
5. 目标跟踪精度:目标跟踪精度是指雷达系统对目标的位置、速度等参数估计的准确程度。
目标跟踪精度的高低直接影响着雷达系统的目标追踪能力和目标识别能力。
在雷达信号测试中,需要评估目标跟踪误差、速度估计误差等指标。
6. 可用性和可靠性:可用性和可靠性是评估雷达系统性能的重要指标。
可用性是指雷达系统在给定时间内正常工作的概率,可靠性是指雷达系统在给定时间内完成任务的能力。
可用性和可靠性的高低直接影响着雷达系统的实际应用价值。
7. 频率稳定性:频率稳定性是指雷达系统中发射和接收信号的频率的稳定程度。
频率稳定性的好坏直接影响雷达系统的测量精度和探测距离。
在雷达信号测试中,需要评估雷达系统的频率稳定性。
总结起来,雷达信号测试的参数指标包括信号强度、信噪比、雷达图像质量、探测概率和虚警概率、目标跟踪精度、可用性和可靠性以及频率稳定性等。
雷达测距测速原理雷达是一种利用电磁波进行测距和测速的技术。
雷达测距测速原理基于电磁波在空间中传播的特性,通过发送电磁波并接收返回信号来计算目标物体的距离和速度。
雷达测距的原理是利用电磁波的传播速度和接收到返回信号的时间差来计算目标物体的距离。
雷达发射器会发射一束电磁波,这束电磁波会在空间中传播,并与目标物体相互作用。
当电磁波与目标物体相互作用后,一部分电磁波会被目标物体反射回来,形成返回信号。
雷达接收器会接收到这个返回信号,并测量从发射到接收的时间差。
根据电磁波在空间中传播的速度,可以通过时间差计算出目标物体与雷达的距离。
雷达测速的原理是基于多普勒效应。
当目标物体相对于雷达静止时,返回信号的频率与发射信号的频率相同。
但是当目标物体相对于雷达运动时,返回信号的频率会发生改变。
根据多普勒效应的原理,当目标物体向雷达靠近时,返回信号的频率会增加;当目标物体远离雷达时,返回信号的频率会减小。
通过测量返回信号的频率变化,就可以计算出目标物体的速度。
雷达测距测速原理的关键在于精确测量发射和接收之间的时间差以及返回信号的频率变化。
为了提高测量的精度,雷达系统通常会采用高频率的电磁波。
高频率的电磁波具有较短的波长,能够更精确地测量距离。
同时,雷达系统还会使用高精度的时钟和频率计算器来确保测量的准确性。
雷达测距测速技术在很多领域都有广泛的应用。
在航空领域,雷达技术可以用于飞机的导航和防撞系统,通过测量其他飞机的距离和速度来确保飞行安全。
在交通领域,雷达技术可以用于交通监控和交通信号灯控制,通过测量车辆的距离和速度来优化交通流量。
在气象领域,雷达技术可以用于天气预报和气象监测,通过测量云层的距离和速度来预测降雨和风暴的情况。
雷达测距测速原理是一种利用电磁波进行测量的技术。
通过测量电磁波的传播时间和频率变化,可以准确计算目标物体的距离和速度。
雷达技术在许多领域都有广泛的应用,为人们的生活和工作提供了便利和安全。

调频连续波雷达(FMCW)测距测速原理,看完这篇基本就懂了!调频连续波雷达Frequency Modulated Continuous Wave, FMCW雷达按照发射信号种类分成脉冲雷达和连续波雷达两⼤类,常规脉冲雷达发射周期性的⾼频脉冲,连续波雷达发射的是连续波信号。
连续波雷达发射的信号可以是单频连续波(CW)或者调频连续波(FMCW),调频⽅式也有多种,常见的有三⾓波、锯齿波、编码调制或者噪声调频等。
其中,单频连续波雷达仅可⽤于测速,⽆法测距,⽽FMCW雷达既可测距⼜可测速,并且在近距离测量上的优势⽇益明显。
FMCW雷达在扫频周期内发射频率变化的连续波,被物体反射后的回波与发射信号有⼀定的频率差,通过测量频率差可以获得⽬标与雷达之间的距离信息,差频信号频率较低,⼀般为KHz,因此硬件处理相对简单、适合数据采集并进⾏数字信号处理。
FMCW雷达收发同时,理论上不存在脉冲雷达所存在的测距盲区,并且发射信号的平均功率等于峰值功率,因此只需要⼩功率的器件,从⽽降低了被截获⼲扰的概率;其缺点是测距量程较短,距离多普勒耦合以及收发隔离难等缺点。
FMCW雷达具有容易实现、结构相对简单、尺⼨⼩、重量轻以及成本低等优点,在民⽤/军事领域均得到了⼴泛的应⽤。
FMCW雷达框图调频连续波雷达如要由收发器和带微处理器的控制单元组成,收发器如果使⽤单个天线进⾏同时发射和接收,FMCW雷达需要铁氧体环形器来分离发射和接收信号,对隔离度要求较⾼。
当然,若使⽤收发分离的贴⽚天线,成本会相对低⼀点。
⾼频信号由压控振荡器(VCO)产⽣,通过功率分配器将⼀部分经过额外放⼤后馈送⾄发射天线,另⼀部分耦合⾄混频器,与接收的回波混频、低通滤波,得到基带差频信号,经过模数转换后送⾄微处理器处理。
FMCW雷达的测距/测速原理以三⾓波调频连续波为例来简单介绍雷达的测距/测速原理。
如下图,红⾊为发射信号频率,绿⾊为接收信号频率,扫频周期为T,扫频带宽为B,发射信号经过⽬标发射,回波信号会有延时,在三⾓形的频率变化中,可以在上升沿和下降沿两者上进⾏距离测量。

超声波雷达的测距原理超声波雷达是一种利用高频超声波进行测距的无线电波雷达。
它的原理是利用超声波在空气中的传播速度与距离的关系,通过发射和接收超声波信号来测量距离。
超声波的频率通常在20kHz到200kHz之间,这种频率的声波在空气中传播时,具有较强的穿透力和折射力。
因此,超声波雷达可以穿透一定的障碍物,如烟雾、雾气、沙尘等,进行远距离的测量。
超声波雷达的测距原理主要分为两种:时间测距和频率测距。
一、时间测距时间测距是利用超声波在发射和接收之间传播的时间来计算距离。
超声波发射器向目标发射超声波信号,当信号遇到目标时,会被反射回来,经过接收器接收。
接收器接收到信号后,会将信号转换为电信号,然后计算发射和接收之间的时间差,再根据声波在空气中的传播速度计算出距离。
时间测距的优点是精度高,可以达到毫米级别。
但是,它的缺点是受到环境影响较大,如温度、湿度等因素会影响声波在空气中的传播速度,从而影响测距精度。
二、频率测距频率测距是利用超声波的频率变化来计算距离。
当超声波发射器向目标发射超声波信号时,信号会被目标反射回来,经过接收器接收。
接收器接收到信号后,会将信号转换为电信号,并进行频率分析。
由于声波在空气中传播时会受到多次反射和折射,所以接收到的信号会受到多普勒效应的影响,导致频率发生变化。
根据多普勒效应的原理,可以计算出发射器和目标之间的相对速度,进而计算出距离。
频率测距的优点是受环境影响较小,可以适应多种环境条件。
但是,它的缺点是精度较低,一般只能达到厘米级别。
总的来说,超声波雷达的测距原理是利用超声波在空气中的传播速度与距离的关系,通过发射和接收超声波信号来测量距离。
时间测距和频率测距是两种常用的测距方法,它们各有优缺点,需要根据具体的应用场景选择合适的方法。
雷达信号测量原理
雷达信号的测量原理主要基于电磁波的发射、反射和接收。
雷达通过天线发射一束电磁波,这些电磁波在遇到目标物后会发生反射。
反射回来的电磁波会被雷达接收并处理,从而获取目标物的位置、速度、形状等信息。
具体来说,雷达信号的测量原理可以分为以下几个步骤:
1. 发射:雷达系统通过天线发射一束电磁波,通常使用微波波段的频率。
发射功率和频率根据应用环境和目标物体的要求进行选择。
2. 脉冲方式:雷达系统通常使用脉冲方式发射电磁波,即以一定时间间隔连续发送短时间的高功率电磁波脉冲。
脉冲的宽度和重复周期根据应用需求进行设置。
3. 接收:发射出去的电磁波遇到目标物后发生反射,其中一部分反射能量会返回雷达装置,被雷达接收。
4. 信号处理:雷达系统对接收到的信号进行处理,提取出有用的信息,如目标物的距离、速度、方位角等。
5. 显示:处理后的信号通过显示设备呈现出来,提供给操作人员使用。
以上就是雷达信号的测量原理,这个过程涉及到很多复杂的物理和工程问题,需要多个领域的专业知识和技术。
《雷达对抗原理》(赵国庆著)课后答案免费下载《雷达对抗原理》(赵国庆著)内容提要第1章雷达对抗概述1.1 雷达对抗的基本概念及含义1.1.1 雷达对抗的含义及重要性1.1.2 雷达对抗的基本原理及主要技术特点1.1.3 雷达对抗与电子战1.2 雷达对抗的信号环境1.2.1 现代雷达对抗信号环境的特点1.2.2 信号环境在雷达对抗设备中的描述和参数1.3 雷达侦察概述1.3.1 雷达侦察的任务与分类1.3.2 雷达侦察的技术特点1.3.3 雷达侦察设备的基本组成1.4 雷达干扰概述1.4.1 雷达干扰技术的分类1.4.2 雷达干扰设备的基本组成习题一参考文献第2章雷达信号频率的测量2.1 概述2.1.1 雷达信号频率测量的重要性2.1.2 测频系统的主要技术指标2.1.3 现代测频技术分类2.2 频率搜索接收机2.2.1 搜索式超外差接收机2.2.2 射频调谐晶体视频接收机2.2.3 频率搜索形式2.2.4 频率搜索速度的选择2.3 比相法瞬时测频接收机2.3.1 微波鉴相器2.3.2 极性量化器的基本工原理2.3.3 多路鉴相器的并行运用2.3.4 对同时到达信号的分析与检测2.3.5 测频误差分析2.3.6 比相法瞬时测频接收机的组成及主要技术参数 2.4 信道化接收机2.4.1 基本工作原理2.4.2 信道化接收机存在的问题2.4.3 信道化接收机的特点和应用 2.5 压缩接收机2.5.1 Chirp变换原理2.5.2 表声波压缩接收机的工作原理 2.5.3 压缩接收机的参数2.6 声光接收机2.6.1 声光调制器2.6.2 空域傅立叶变换原理2.6.3 声光接收机的工作原理2.6.4 声光接收机的主要特点习题二参考文献 ?第3章雷达的方向测量和定位3.1 概述3.1.1 测向的目的3.1.2 测向的方法3.1.3 测向系统的主要技术指标3.2 振幅法测向3.2.1 波束搜索法测向技术3.2.2 全向振幅单脉冲测向技术3.2.3 多波束测向技术3.3 相位法测向3.3.1 数字式相位干涉仪测向技术3.3.2 线性相位多模圆阵测向技术3.4 对雷达的定位3.4.1 单点定位3.4.2 多点定位习题三参考文献 ?第4章雷达侦察的信号处理4.1 概述4.1.1 信号处理的任务和主要技术要求 4.1.2 信号处理的基本流程和工作原理 4.2 对雷达信号时域参数的'测量4.2.1 tTOA的测量4.2.2 PW的测量4.2.3?AP的测量4.3 雷达侦察信号的预处理4.3.1 对已知雷达信号的预处理4.3.2 对未知信号的预处理4.4 对雷达信号的主处理4.4.1 对已知雷达信号的主处理4.4.2 对未知雷达信号的主处理4.5 数字接收机和数字信号处理4.5.1 数字接收机4.5.2 数字测频4.5.3 数字测向4.5.4 信号脉内调制的分析习题四参考文献 ?第5章雷达侦察作用距离与截获概率5.1 侦察系统的灵敏度5.1.1 切线信号灵敏度PTSS和工作灵敏度POPS的定义 5.1.2 切线信号灵敏度PTSS的分析计算5.1.3 工作灵敏度的换算5.2 侦察作用距离5.2.1 简化侦察方程5.2.2 修正侦察方程5.2.3 侦察的直视距离5.2.4 侦察作用距离Rr对雷达作用距离Ra的优势 5.2.5 对雷达旁瓣信号的侦察5.3 侦察截获概率与截获时间5.3.1 前端的截获概率和截获时间5.3.2 系统截获概率和截获时间习题五参考文献第6章遮盖性干扰6.1 概述6.1.1 遮盖性干扰的作用和分类6.1.2 遮盖性干扰的效果度量6.1.3 最佳遮盖干扰波形6.2 射频噪声干扰6.2.1 射频噪声干扰对雷达接收机的作用6.2.2 射频噪声干扰对信号检测的影响6.3 噪声调幅干扰6.3.1 噪声调幅干扰的统计特性6.3.2 噪声调幅干扰对雷达接收机的作用 6.3.3 噪声调幅干扰对信号检测的影响 6.4 噪声调频干扰6.4.1 噪声调频干扰的统计特性6.4.2 噪声调频干扰对雷达接收机的作用 6.4.3 噪声调频干扰对信号检测的影响 6.5 噪声调相干扰6.5.1 噪声调相干扰的统计特性6.5.2 影响噪声调相干扰信号效果的因素 6.6 脉冲干扰习题六参考文献第7章欺骗性干扰7.1 概述7.1.1 欺骗性干扰的作用7.1.2 欺骗性干扰的分类7.1.3 欺骗性干扰的效果度量7.2 对雷达距离信息的欺骗7.2.1 雷达对目标距离信息的检测和跟踪7.2.2 对脉冲雷达距离信息的欺骗7.2.3 对连续波调频测距雷达距离信息的欺骗 7.3 对雷达角度信息的欺骗7.3.1 雷达对目标角度信息的检测和跟踪7.3.2 对圆锥扫描角度跟踪系统的干扰7.3.3 对线性扫描角度跟踪系统的干扰7.3.4 对单脉冲角度跟踪系统的干扰7.4 对雷达速度信息的欺骗7.4.1 雷达对目标速度信息的检测和跟踪7.4.2 对测速跟踪系统的干扰7.5 对跟踪雷达AGC电路的干扰7.5.1 跟踪雷达AGC电路7.5.2 对AGC控制系统的干扰习题七参考文献第8章干扰机构成及干扰能量计算8.1 干扰机的基本组成和主要性能要求8.1.1 干扰机的基本组成8.1.2 干扰机的主要性能要求8.2 干扰机的有效干扰空间8.2.1 干扰方程8.2.2 干扰机的时间计算8.3 干扰机的收发隔离和效果监视8.3.1 收发隔离8.3.2 效果监视8.4 射频信号存储技术8.4.1 模拟储频技术(ARFM)8.4.2 数字储频技术(DRFM)8.5 载频移频技术8.5.1 由行波管移相放大器构成的载频移频电路 8.5.2 由固态移相器构成的载频移频电路习题八参考文献第9章对雷达的无源对抗技术9.1 箔条干扰9.1.1 箔条干扰的一般特性9.1.2 箔条的有效反射面积9.1.3 箔条的频率响应9.1.4 箔条干扰的极化特性9.1.5 箔条回波信号的频谱9.1.6 箔条的战术应用9.2 反射器9.2.1 角反射器9.2.2 龙伯透镜反射器9.3 假目标和雷达诱饵9.3.1 带有发动机的假目标9.3.2 火箭式雷达诱饵9.3.3 投掷式雷达诱饵9.3.4 拖曳式雷达诱饵9.4 隐身技术习题九参考文献《雷达对抗原理》(赵国庆著)目录该书系统介绍了雷达对抗的基本原理,系统的组成,应用的主要技术等。
调频连续波雷达(FMCW)测距测速原理FMCW雷达的工作原理基于多普勒效应和频率测量。
当发射机发送连续变化的频率调制信号时,信号的频率将会随时间线性变化。
这个频率变化的斜率称为调频斜率。
当发射信号经过天线发射出去,在遇到目标后,信号会被目标散射回来,然后被接收天线接收。
当接收天线接收到返回信号时,会将信号和发射信号进行混频处理,将其与发射信号相乘。
这样做的目的是为了提取目标的频率信息。
由于目标的速度不同,返回信号的频率也会有所不同。
根据多普勒效应的原理,当目标向雷达揭示而来时,频率会比发射信号的频率高;相反,当目标远离雷达时,频率会比发射信号的频率低。
接收到的混频信号将通过低通滤波器进行滤波,以去除不想要的频率成分。
然后,信号将被转换成数字信号,通过快速傅里叶变换(Fourier Transform)进行频谱分析。
频谱的峰值表示目标的频率,根据频率的变化可以计算出目标的速度。
根据多普勒频移的公式,测量得到的频移值与目标的速度成正比。
利用目标的速度与雷达到目标的距离之间的关系,可以通过简单的数学运算得到目标的距离。
由于信号频率的线性变化,可以通过测量信号的起始频率和终止频率,以及相应的时间间隔,计算得到距离。
在FMCW雷达系统中,还需要对信号的回波强度进行测量,以评估目标的反射特性。
这可以通过测量接收信号的功率来实现。
通过分析接收到的功率信号,可以确定目标的散射截面积(Cross Section),从而估计目标的大小。
总结起来,FMCW雷达的测距测速原理基于多普勒效应和频率测量。
通过发送频率变化的信号,接收并处理返回信号,测量目标的频率和功率,从而得到目标的距离、速度和反射特性。
这种雷达系统具有高精度、高分辨率和广泛测速范围的优势,广泛应用于交通监测、无人驾驶、气象观测等领域。
毫米波雷达测速原理
毫米波是电磁波的一种,波长介于微波和红外线之间,频率范围在
30GHz到300GHz之间。
相比其他波段的雷达,毫米波雷达具有较高的分
辨率和精度,能够提供更为精确的测速结果。
毫米波雷达测速主要依靠多普勒效应来实现。
当发射的毫米波信号与
目标物体接触后,目标物体的运动会引起信号的频率改变。
根据多普勒效
应的原理,如果目标物体远离雷达,则接收到的信号频率会减小;如果目
标物体靠近雷达,则接收到的信号频率会增大。
通过测量信号的频率差异,毫米波雷达可以计算出目标物体与雷达之
间的速度。
通常,毫米波雷达会使用两个天线来接收信号,一个天线用于
接收静止信号,另一个天线用于接收目标物体的反射信号。
通过比较两个
接收信号的频率差异,可以准确测算物体的速度。
此外,毫米波雷达还可以利用相干测量原理来测速。
相干测量是指通
过测量毫米波信号的相位差,来计算目标物体的速度。
当信号经过目标物
体反射回来时,会与发射时的信号存在不同的相位差。
通过对相位差的测量,可以计算出目标物体的速度。
毫米波雷达测速技术在交通管理、机场安全检查、智能驾驶等领域具
有广泛应用。
由于毫米波具有较高的穿透力和精确度,能够提供更准确的
测量结果,因此在各种复杂环境下都能够取得较好的性能表现。
同时,毫
米波雷达还可以实现实时测速,能够快速准确地获取目标物体的速度信息。
雷达测速原理
雷达测速原理是利用雷达信号的回波特性来测量目标物体的速度。
雷达系统发射出的高频电磁波通过天线传播出去,并在遇到目标物体时产生回波。
根据回波的时间延迟和频率变化,可以计算出目标物体的速度。
雷达测速原理主要分为两种:连续波雷达和脉冲雷达。
连续波雷达通过持续发送和接收电磁波来测量目标的速度,根据回波信号与发送信号之间的频率差异来计算速度。
而脉冲雷达则在一定时间间隔内发送短脉冲信号,并接收回波信号,通过测量回波信号的时延来计算速度。
在雷达测速中,常用的原理是多普勒效应。
多普勒效应是当波源和接收器相对运动时,感受到的波的频率发生变化的现象。
当目标物体朝向雷达靠近时,回波信号的频率会比发送信号高;当目标物体远离雷达时,回波信号的频率会比发送信号低。
通过测量频率的变化,可以得到目标物体的速度。
雷达测速的精度和可靠性非常高,可以在各种天气和环境条件下进行测量。
由于其无需接触目标物体,可以在远距离进行测速,因此被广泛应用于交通管理、军事、天气预报等领域。
但需要注意的是,雷达测速在测量中可能会受到多径效应、杂波干扰等因素的影响,因此在实际应用中需要进行相应的校正和处理。
fmcw雷达测距测速测角原理
FMCW(频率调制连续波)雷达是一种常用于测距、测速和
测角的技术。
其原理是通过发射连续调频的微波信号并接收回波,利用接收到的回波信号与发射信号之间的频率差来实现测量。
测距原理:在FMCW雷达中,发射器发射的信号频率会逐渐
变化(通常是线性变化),当这个信号遇到目标物体并发生回波时,回波信号的频率也会与发射信号的频率有所不同。
通过测量回波信号与发射信号之间的频率差,可以根据光速的知识计算出目标物体与雷达的距离。
测速原理:当目标物体与雷达相对运动时,回波信号的频率也会存在多普勒效应,即回波信号的频率会发生变化。
利用这个变化的频率可以计算出目标物体的相对速度。
测角原理:FMCW雷达还可以通过两个不同的接收天线来接
收回波信号,并通过对两个接收信号的差异进行处理来实现测量目标物体的方向角。
通过比较两个信号的相位、幅度或时间差等参数,可以计算出目标物体的角度。
总之,FMCW雷达利用发射信号和回波信号之间的频率差,
结合多普勒效应和相位差等特性,可以实现对目标物体的测距、测速和测角。