纯电动客车整车总线通讯协议-仪表-0830-扬子江
- 格式:pdf
- 大小:3.84 MB
- 文档页数:20
扬子江客车“在线充”解决充电难题作者:暂无来源:《时代汽车》 2015年第5期本刊记者︱赵欢打出“新能源客车专家”旗号的东风扬子江汽车(武汉)有限责任公司(以下简称“东风扬子江”)以“在线充电”为纯电动客车充电难题提供了另外一个解决方案。
充电难题新解在武汉市区,有这样一批特殊的纯电动公交车,它们像无轨电车一样连接在天上的电车线进行充电,日续航里程可达150 公里以上,却有着更轻的车身重量和更为宽敞的内部空间。
这就是扬子江客车生产的“纯电动在线充城市客车”。
湖北省城市客车工程技术研究中心主任近日,记者在“2015 北京国际道路运输、城市公交车辆及零部件展览会”上,见到了东风扬子江总经理助理、湖北省城市客车工程技术研究中心主任雷洪钧博士。
雷洪钧向记者介绍了东风扬子江在线充电式纯电动公交巴士的“无污染、无阻碍、无顾虑”运营方案。
作为“在线充电”为纯电动客车的代表作,本次展会东风扬子江带来了这款城市客车。
雷洪钧告诉记者,本款客车在武汉市公交系统已经有200 台正常运行。
今年年初又新增100 台订单。
“在线充电解决了传统纯电动车面临的很多难题”,雷洪钧说。
通过发车前外部电捂热,解决传统纯电动车低温无法启动或者工作曲线差,充电放电差的问题;通过晚上慢充,白天补电的模式,解决了快速充电电池衰竭严重的难题(专家预计扬子江搭载的电池拥有15 年左右的使用寿命,当前质保8 年),2 年电池衰减仅有2%,相比之下,同期快充可使电池衰减30-40%;通过使用环节的节约,以8 年期的全生命周期计算,扬子江“在线充”客车比柴油客车便宜约20 万(扬子江在线充客车8 年使用成本205 万,同等传统柴油车226万);座位数增加;充电方便性大大提升,晚上380V 电源直充,离开了充电桩束缚;因为携带电池减少,节约了30% 左右的成本;利用碎片化的时间进行充补电,运营效率是充换电式纯电动公交车的2 倍。
记者了解到,扬子江客车今年前4 个月的销售形势不太好。
目录1 整车控制器控制功能和原理 (1)2 纯电动客车总成分布式网络架构 (1)3 整车控制器开发流程 (3)3.1 整车及控制策略仿真 (4)3.2 整车软硬件开发 (5)3.2.1 整车控制器的硬件开发 (6)3.2.2 整车控制器的软件开发 (10)3.3 整车控制器的硬件在环测试 (12)3.4 整车控制器标定 (15)3.4.1 整车控制器的标定系统 (15)1整车控制器控制功能和原理纯电动客车是由多个子系统构成的系统,主要包括储能、驱动等动力系统,以及其它附件如空调等。
各子系统几乎都通过自己的控制单元(ECU)来完成各自功能和目标。
为了满足整车动力性、经济性、安全性和舒适性的目标,一方面必须具有智能化的人车交互接口,另一方面,各系统还必须彼此协作,优化匹配。
因此,纯电动必须需要一个整车控制器来管理系统中的各个部件。
纯电动车辆以整车控制器为主节点的、基于高速CAN总线的分布式动力系统控制网络,通过该网络,整车控制器可以对纯电动车辆动力链的各个环节进行管理、协调和监控,提高整车能量利用效率,确保车辆安全性和可靠性。
整车控制器的功能如下:1)车辆驾驶:采集司机的驾驶需求,管理车辆动力。
2)网络管理:监控通信网络,信息调度,信息汇总,网关。
3)仪表的辅助驱动。
4)故障诊断处理:诊断传感器、执行器和系统其他部件故障并进行相应的故障处理,实时显示故障。
5)在线配置和维护:通过车载标准CAN端口,进行控制参数修改,匹配标定,功能配置,监控,基于标准接口的调试能力等。
6)能量管理:通过对纯电动客车载耗能系统(如空调、电动泵等)的协调和管理,以获得最佳的能量利用率。
7)功率分配:通过综合车辆信息、电池的SOC、温度、电压、电流和电机的温度等信息计算电机功率分配,进行有效的能量管理,以保证车辆能量效率达到最优。
8)坡道驻车辅助控制9)坡道起步时防溜车控制2纯电动客车动力总成分布式网络架构纯电动客车是由多个子系统构成的复杂系统。
![宇电AIBUS通讯协议说明(V7[1].0)](https://uimg.taocdn.com/ddc115c9aaea998fcd220e0d.webp)
宇电AIBUS通讯协议说明(V7[1].0)编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(宇电AIBUS通讯协议说明(V7[1].0))的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为宇电AIBUS通讯协议说明(V7[1].0)的全部内容。
AIBUS通讯协议说明(V7。
0)AIBUS是厦门宇电自动化科技有限公司为AI系列显示控制仪表开发的通讯协议,能用简单的指令实现强大的功能,并提供比其它常用协议(如MODBUS)更快的速率(相同波特率下快3—10倍),适合组建较大规模系统.AIBUS采用了16位的求和校正码,通讯可靠,支持4800、9600、19200等多种波特率,在19200波特率下,上位机访问一台AI—7/8系列高性能仪表的平均时间仅20mS,访问AI-5系列仪表的平均时间为50mS。
仪表允许在一个RS485通讯接口上连接多达80台仪表(为保证通讯可靠,仪表数量大于60台时需要加一个RS485中继器)。
AI系列仪表可以用PC、触摸屏及PLC作为上位机,其软件资源丰富,发展速度极快。
基与PC 的上位机软件广泛采用WINDOWS作为操作环境,不仅操作直观方便,而且功能强大。
最新的工业平板触摸屏式PC的应用,更为工业自动化带来新的界面。
这使得AIDCS系统价格大大低于传统DCS系统,而性能及可靠性也具备比传统DCS系统更优越的潜力,V7.X版本AI-7/8系列仪表允许连续写参数,写给定值或输出值,可利用上位机将仪表组成复杂调节系统.一、接口规格AI系列仪表使用异步串行通讯接口,接口电平符合RS232C或RS485标准中的规定。
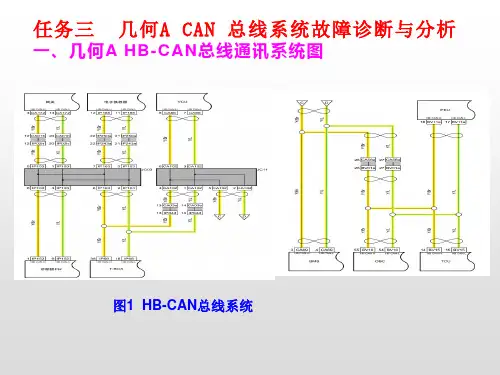
纯电动汽车的总线概念
总线是一种用于在不同系统和部件之间传输数据和信息的通信系统。
在纯电动汽车中,总线系统负责传输电池管理系统(BMS)、发动机控制、车载娱乐系统和车身控制系统等各种信号和数据。
总线系统的实现方式有两种:单总线和双总线。
单总线是指所有数据和信号都通过一个总线来传输,优点是连接简单、成本低廉,缺点是数据和信号互相干扰的可能性比较大。
双总线是指将数据和信号分成两个总线传输,一般会将重要的信号和数据放在双总线上,这样可以提高总线信号的稳定性和可靠性,减小干扰的可能性,但也会增加系统成本。
除了单总线和双总线外,还有CAN总线、LIN总线等不同的总线协议。
总的来说,总线系统的设计是纯电动汽车电气系统中非常重要的一个环节,对于提高电动汽车的整体性能和稳定性非常关键。
新能源汽车不同类型的总线标注方法
新能源汽车中常用的总线类型主要包括LIN总线、CAN总线、FlexRay总线和MOST总线等,它们各自有不同的标注方法和应用场景。
具体如下:
1. LIN总线:LIN(Local Interconnect Network)是一种低成本的串行通信网络,通常用于汽车中的分布式电子系统控制。
它通常作为CAN总线的辅助功能使用,在不需要高带宽和多功能场合,如智能传感器和制动装置之间的通讯,使用LIN总线可以节省成本。
2. CAN总线:CAN(Controller Area Network)是一种能够实现分布式实时控制的串行通信网络。
由德国Bosch公司开发,广泛应用于汽车电子控制系统中。
CAN总线具有优秀的特性,能够在不同的ECU(电子控制单元)之间传递信息。
需要注意的是,不同速度类型的CAN总线设备不能直接连在同一路总线上,它们之间需要通过网关隔离。
3. FlexRay总线:FlexRay是一种为满足更高数据传输速率而设计的通信协议,它比CAN和LIN总线有更高的速度和确定性,通常用于实时性要求较高的应用,如动力控制系统和底盘控制。
4. MOST总线:MOST(Media Oriented Systems Transport)总线是一种多媒体定向系统传输技术,主要用于车载娱乐和信息系统的数据传输。
它可以传输音频、视频、数据和控制信号,具有较高的带宽和集成度。
文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY-CAN-V1.00)版本记录版本制作者日期说明V1.00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System ,以下简称BMS)与电机控制器(Vehicle Control Unit ,简称VCU)、智能充电机(Intelligent Charger Unit ,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换。
本标准的CAN 标识符为29位,通信波特率为250kbps 。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆 控制器局域网络 第1部分:数据链路层和物理信令(Road Vehicles – Controller Area Network (CAN) Part 1:Data Link Layer and Physical Signalling). SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议 第11部分:物理层,250Kbps ,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair). SAE J1939-21:2006商用车控制系统局域网络(CAN )通信协议 第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY—CAN-V1.00)版本记录版本制作者日期说明V1。
00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System,以下简称BMS)与电机控制器(Vehicle Control Unit,简称VCU)、智能充电机(Intelligent Charger Unit,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换.本标准的CAN标识符为29位,通信波特率为250kbps。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆控制器局域网络第1部分:数据链路层和物理信令(Road Vehicles – Controller Area Network (CAN)Part 1:Data Link Layer and Physical Signalling).SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议第11部分:物理层,250Kbps,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair)。
SAE J1939-21:2006商用车控制系统局域网络(CAN)通信协议第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
纯电动乘用车CAN总线通讯协议(V1.0)编制:李冬明日期:2014.11.21.审核:日期:_批准:日期:_广东陆地方舟新能源汽车电驱动系统有限公司2014年11月版本历史一、通讯协议说明1、CAN通讯协议符合J1939;2、波特率:250K;3、CAN数据长度:8 Bytes;二、网络拓扑结构三、纯电动乘用车ECU节点定义四、CAN报文说明4.1 电机控制器报文(1)电机控制器报文1控制器状态:电机控制器故障代码:采用4位数值xxxx形式表示,其中xxxx使用十进制数值表示。
(2)电机控制器报文2(3)电机发送VCU报文电机及控制器状态(1表示有效,0表示无效)4.2、电池管理系统(BMS)通讯报文BMS报文1BMS报文2BMS报文3故障报警1:故障报警2:故障报警3:BMS状态:4.3、VCU通讯报文(1)VCU发送电机控制报文1电机工作模式指令(1表示有效或正常,0表示无效或故障)注:1)对直流电压限制值,驱动工况下为最低工作电压限制值,制动工况下为最高制动电压限制值。
2)对直流电流限制值,驱动工况下为最大输出电流限制值,制动工况下为最大回馈电流限制值。
(2)VCU发送BMS报文2电池工作模式指令(3)整车控制器报文3(3)整车控制器报文4附表:Byte3定义驾驶员操作状态Bit1 脚刹开关0 表示断开;1 表示闭合;Bit2 驻车开关0 表示断开;1 表示闭合;Bit3 手刹开关0 表示断开;1 表示闭合;Bit4~5 座椅安全带00B 表示断开;11B 表示全部闭合;01B表示驾驶员处未闭合;10B 表示乘员处未闭合附表:Byte4定义换挡器状态Bit1 AMT工作模式:0表示自动模式;1表示手自一体模式;Bit2:经济/运动模式开关:0表示经济模式;1表示运动模式;Bit3~4:保留Bit5~8:0000B:空挡;0001B:一档;0010B:二档;(0011B:三档;0100B:四档;0101B:五档… 以此类推)1111B:倒档。
bms主控与从控通讯协议BMS主控与从控通讯协议随着电动汽车的普及和发展,电动汽车的电池管理系统(Battery Management System,简称BMS)也变得越来越重要。
BMS主控与从控通讯协议是BMS系统中的关键部分,它负责主控与从控之间的数据传输和通信。
BMS主控与从控通讯协议的作用是确保主控和从控之间可以稳定、高效地交换信息。
主控是BMS系统的核心,负责对电池组的监测、管理和控制,而从控则是主控下属的一些辅助模块,用于采集电池组的状态参数和执行主控的指令。
主控与从控之间的通信协议必须能够满足高速、可靠、实时的要求,以确保BMS系统的正常工作。
在BMS系统中,主控和从控之间的通信可以通过有线或无线方式实现。
有线通信通常使用CAN(Controller Area Network)总线协议,这是一种广泛应用于汽车电子系统中的通信协议。
CAN总线协议具有高速、可靠、抗干扰等特点,非常适合用于BMS系统中主控与从控之间的通信。
通过CAN总线,主控可以向从控发送指令,并获取从控采集的电池组状态信息,如电压、电流、温度等。
除了有线通信外,BMS系统还可以采用无线通信方式进行主控与从控之间的数据传输。
常用的无线通信协议有蓝牙、Wi-Fi和Zigbee 等。
蓝牙通信适用于短距离通信,可以实现主控与从控之间的实时数据传输和控制。
Wi-Fi通信具有较大的覆盖范围,可以用于主控与从控之间的数据传输和远程监控。
Zigbee通信适用于低功耗、低速率的无线传感器网络,可以用于从控之间的数据采集和传输。
无论是有线通信还是无线通信,BMS主控与从控通讯协议必须具备以下特点:1. 实时性:BMS系统对电池组的监测和控制要求实时性高,通讯协议必须能够保证数据的及时传输和响应。
2. 可靠性:BMS系统对电池组的安全和可靠性要求较高,通讯协议必须具备数据校验和容错机制,以确保数据的准确性和完整性。
3. 灵活性:BMS系统的功能和性能可能会随着电动汽车的使用场景和需求而变化,通讯协议必须能够支持灵活的配置和扩展。
目录宁波拜特发送给通讯板CAN1 (3)第一帧0001:宁波拜特发送给充电机 (3)第二帧0002:宁波拜特发送给充电机 (3)第三帧0003:宁波拜特发送给充电机 (4)第四帧0004:宁波拜特发送给充电机 (4)第五帧0005:宁波拜特发送给充电机 (4)第六帧0006:宁波拜特发送给充电机 (5)通讯板CAN1 发送给宁波拜特 (5)第一帧401充电机发送给宁波拜特 (5)第二帧402:充电机发送给宁波拜特 (5)第三帧403:充电机发送给宁波拜特 (6)第四帧404:充电机发送给宁波拜特 (6)第五帧405:充电机发送给宁波拜特 (7)主控板发送给通讯板CAN2 (7)第一帧18A0ABCC:APF侧主控板发送给通讯板 (7)第二帧:BiDCDC侧主控板发送给通讯板 (8)第三帧C0:APF侧主控板发送给通讯板 (8)第四帧:APF侧主控板发送给通讯板 (9)第五帧:BiDCDC侧主控板发送给通讯板 (9)通讯板发送给主控板CAN2 (10)第一帧C0: 通讯板发送给主控板CAN2 (10)第二帧C1: 通讯板发送给主控板CAN2 (11)第三帧C2:通讯板发送给主控板CAN2 (11)第四帧404:通讯板发送给主控板CAN2 (11)BiDCDC侧发送给APF侧 (13)第一帧C0: BiDCDC发送给APF侧CAN2 (13)第二帧:BiDCDC侧主控板发送给APF侧CAN2 (14)APF侧发送给BiDCDC侧 (15)第一帧C0: APF发送给BiDCDC侧CAN2 (15)第二帧: APF发送给BiDCDC侧CAN2 (15)3.1、充电桩CAN1发往充电机A通迅板CAN1:共2帧 (16)3.1.1第一帧D1:充电桩对充电机的控制命令 (16)3.1.2第二帧D2:充电统计信息数据 (16)3.2、充电机A通迅板CAN1发往充电桩协议:共4帧 (17)3.2.1第一帧C1:充电机运行信息 (17)3.2.2第二帧C2:充电机交流输入信息 (18)3.2.3第三帧C3:充电机APF侧运行信息码与温度 (18)3.2.4第三帧C4:充电机BiDCDC侧运行信息码与温度 (19)3.3、充电机B通迅板CAN3发往上位机协议:共9帧 (20)3.3.1第一帧D1:充电机工作信息 (20)3.3.2第二帧D2:充电信息统计数据 (20)3.3.3第三帧C1:充电机状态信息 (21)3.3.4第四帧C2:充电机交流输入信息 (22)3.3.5第五帧C3:充电机APF侧工作信息码与温度 (22)3.3.6第六帧C4:充电机BiDCDC侧工作信息码与温度 (23)3.3.7第七帧E1:电动汽车电池组单体电压信息1 (23)3.3.8第八帧E2:电动汽车电池组单体电压信息2 (24)3.3.9第九帧E3:电动汽车电池组信息 (24)3.4、CAN以太网转换器发往充电机B通迅板CAN3协议: (25)3.4.1第一帧C1:监控系统对充电机的控制命令 (25)C1:通过CANB板的CAN1发送监控系统对充电机的控制命令 (26)宁波拜特发送给通讯板CAN1第一帧0001:宁波拜特发送给充电机第二帧0002:宁波拜特发送给充电机第三帧0003:宁波拜特发送给充电机第四帧0004:宁波拜特发送给充电机第五帧0005:宁波拜特发送给充电机第六帧0006:宁波拜特发送给充电机通讯板CAN1 发送给宁波拜特第一帧401充电机发送给宁波拜特第二帧402:充电机发送给宁波拜特第三帧403:充电机发送给宁波拜特第四帧404:充电机发送给宁波拜特第五帧405:充电机发送给宁波拜特主控板发送给通讯板CAN2第一帧18A0ABCC:APF侧主控板发送给通讯板第二帧:BiDCDC侧主控板发送给通讯板第三帧C0:APF侧主控板发送给通讯板第四帧:APF侧主控板发送给通讯板第五帧:BiDCDC侧主控板发送给通讯板通讯板发送给主控板CAN2第一帧C0: 通讯板发送给主控板CAN2第二帧C1: 通讯板发送给主控板CAN2第三帧C2:通讯板发送给主控板CAN2第四帧404:通讯板发送给主控板CAN2第五帧F1:通讯板发送给主控板CAN2【新增参数设置】第六帧F2:通讯板发送给主控板CAN2【新增参数设置】第七帧F3:通讯板发送给主控板CAN2【新增参数设置】BiDCDC侧发送给APF侧第一帧C0: BiDCDC发送给APF侧CAN2第二帧:BiDCDC侧主控板发送给APF侧CAN2APF侧发送给BiDCDC侧第一帧C0: APF发送给BiDCDC侧CAN2第二帧: APF发送给BiDCDC侧CAN23.1、充电桩CAN1发往充电机A通迅板CAN1:共2帧3.1.1第一帧D1:充电桩对充电机的控制命令3.1.2第二帧D2:充电统计信息数据3.2、充电机A通迅板CAN1发往充电桩协议:共4帧3.2.1第一帧C1:充电机运行信息3.2.2第二帧C2:充电机交流输入信息3.2.3第三帧C3:充电机APF侧运行信息码与温度3.2.4第三帧C4:充电机BiDCDC侧运行信息码与温度3.3、充电机B通迅板CAN3发往上位机协议:共9帧3.3.1第一帧D1:充电机工作信息3.3.2第二帧D2:充电信息统计数据BYTE1 起始时间_小时低字节充电起始时间为:时分秒高4小时。