纯电动客车整车CAN通讯协议
- 格式:pdf
- 大小:270.11 KB
- 文档页数:51
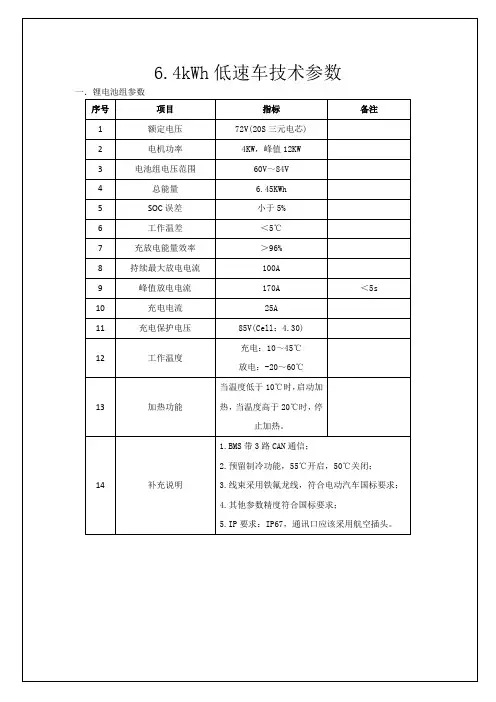
纯电动汽车通信协议版本号:V1.0(2016/08/18)武汉合康动力技术有限公司更改记录:目录一:整车网络拓扑结构: - 4 -二:通讯协议制定的原则- 4 -三:Can网络节点地址分配- 6 -四:电池管理系统协议- 7 -4.1电池基本信息 ID:0x18F201F3 ........................................................................................ - 7 -4.2电池基本信息2 ID:0x18F202F3 ..................................................................................... - 7 -4.3电池故障报警信息 ID:0x18F205F3 ................................................................................ - 9 -4.4电池单体最高电压信息1 ID:0x18F206F3 ................................................................... - 12 -4.5电池单体最高电压信息2 ID:0x18F207F3 ................................................................... - 12 -4.6电池单体最低电压信息1 ID:0x18F208F3 ................................................................... - 13 -4.7电池单体最低电压信息2 ID:0x18F209F3 ................................................................... - 14 -4.8电池最高温度信息 ID:0x18F20AF3 ............................................................................. - 14 -4.9电池最低温度信息 ID:0x18F20BF3.............................................................................. - 15 -4.10电池极柱温度信息1 ID:0x18F210F3 ......................................................................... - 16 -4.11电池极柱温度信息2 ID:0x18F211F3 ......................................................................... - 16 -4.12电池极柱温度信息3 ID:0x18F212F3 ......................................................................... - 17 -4.14电池箱体在线状态 ID:0x185017F3 ............................................................................ - 18 -4.15电池组基本信息1(厂家容量) ID: 0x18F20CF3 ..................................................... - 19 -4.16电池组基本信息2(序列号) ID:0x18F221F3 ........................................................ - 20 -4.17电池组基本信息3(总能量) ID:0x18F222F3 ........................................................ - 21 -4.18电池组充电状态(此帧只在充电过程中发出)ID 0x18F20DF3 .............................. - 21 -4.19绝缘检测仪 ID: 0x1819A1A4....................................................................................... - 22 -五:整车控制器(VCU) 协议- 24 -5.1整车控制器状态信息1 ID:0x18F101D0......................................................................... - 24 -5.2整车控制器状态信息2 ID:0x18F103D0......................................................................... - 26 -5.3VCU使能控制 ID:0x18F105D0 ....................................................................................... - 26 -5.4高压柜状态信息 ID:0x18F106D0.................................................................................... - 27 -六:电机控制器(MCU) - 28 -6.1AMT控制器报文1 ......................................................................................................... - 29 -6.2驱动电机控制器报文1 (驱动电机反馈报文) ................................................................ - 30 -6.3驱动电机控制器报文2 (驱动电机反馈报文) ................................................................ - 31 -七:高压附件控制器(发送) - 33 -7.1助力油泵发送报文状态ID 0x0CF601 A0 ...................................................................... - 33 -7.3气泵发送报文状态ID 0x0CF603 A2 .............................................................................. - 34 -八:仪表- 36 -8.1车辆状态信息 ID:18F40117 ........................................................................................... - 36 -8.2车辆里程信息 ID:18F40217 ........................................................................................... - 37 -一:整车CAN网络拓扑结构:注:终端电阻匹配请按拓扑图中执行!!电机CANA上匹配电阻分别在电机控制器及AMT整车控制器内部整车CANB上匹配电阻分别在仪表及AMT整车控制器内部电池箱CANC上匹配电阻分别在BMS主控内及通信线束末端(线束末端电阻由线束设计单位负责)充电CAND上匹配电阻分别在在BMS主控内及充电机内部二:通讯协议制定的原则1.本协议主要规定了整车CANB上的通信协议;CANC电池箱之间通信由配套厂家自行定义;CAND如无特殊要求采用GBT_27930-20112.本协议采用INTEL格式。
纯电动车BMS与整车系统CAN通信协议详情随着环保意识的增强和电动车市场的迅速发展,纯电动车(Battery Electric Vehicle,BEV)作为零排放、零尾气的新能源汽车正逐渐受到人们的关注和青睐。
在纯电动车的电池管理系统(Battery Management System,BMS)中,与整车系统之间的通信协议变得尤为重要。
本文将详细介绍纯电动车BMS与整车系统CAN通信协议的相关内容。
一、纯电动车BMS与整车系统的关系纯电动车的BMS作为一套独立的系统,主要用于监测和管理电池组的状态、实时数据采集、故障诊断以及能量管理等功能。
而整车系统则负责电动车的整体控制,包括电机控制、车速控制、动力分配等。
BMS与整车系统之间的通信,可以实现BMS对整车系统的控制和监控,保证电池组和整车系统的协调运行,提高电动车的安全性和性能。
二、CAN通信协议的基本原理控制器局域网络(Controller Area Network,CAN)是一种广泛应用于汽车、工业自动化等领域的通信协议。
CAN总线采用串行通信方式,具有高可靠性、抗干扰能力强的特点,在电动车领域得到了广泛应用。
CAN协议定义了通信的物理层、数据链路层和应用层,保证了数据的可靠传输和节点间的高效通信。
三、CAN通信协议在纯电动车BMS与整车系统中的应用1. 数据交互:CAN通信协议在BMS和整车系统之间实现了数据的双向交互。
BMS可以向整车系统提供电池组的相关信息,如电池电压、电流、温度等。
同时,整车系统也可以向BMS发送指令,如充电指令、功率调节指令等。
2. 故障诊断:CAN通信协议可以实现对电池组和整车系统的故障诊断。
当BMS检测到电池组或整车系统存在异常情况时,会通过CAN总线将故障码发送给整车系统,从而实现故障的定位和诊断。
3. 控制策略:CAN通信协议可以实现BMS对整车系统的控制。
例如,BMS可以根据电池组的状态和整车系统的需求,发送合适的控制策略给整车系统,如调节电机的输出功率、控制充放电速度等。
整车CAN通讯协议的基本拓扑结构详解电动汽车,以电池和(电机)系统取代了内燃机汽车的发动机系统,使得汽车上主要的结构和(电气)件发生了很大变化。
在传统汽车上已经比较成熟的(CAN)(总线技术),电动汽车仍然需要作出必要调整才能够使用。
1 电动汽车的CAN协议常用车辆CAN总线通讯协议,大多直接采用SAE-J1939的形式制定。
电动汽车首先遇到了电池系统、电机系统等新加入电器需要重新设定PGN码等问题。
CAN协议始终处在诸侯割据的状态。
在过去的几年中,国家及相关机构也一直在对电动汽车的CAN通讯协议进行研究,希望形成统一的协议体系。
统一的CAN协议,首先是零部件供应商的福音。
当前主流主机厂,每家都有自己的整车通讯协议,各个供应商,需要根据整车厂的定义,修改零部件的CAN协议。
制定电动汽车的CAN协议,基本的思路是在SAE-J1939的基础上,根据自身电动汽车的需求,做出必要的调整。
1.1 原则常用的CAN总线协议标准SAE-J1939中,标准给OSI(开放系统互联参考模型)定义成七层:物理层,数据链路层,(网络)层,传输层,会话层,表示层,应用层。
其中物理层和数据链路层是最基础的两层,在标准ISO 11898中进行定义,并且不可变更。
而SAE-J1939定义了应用层的相关会话规则,所谓通讯协议。
因此我国的CAN (通信)协议的制定主要包括物理层和应用层协议两个方面,其中最主要的工作还是集中在应用层上。
1.2 物理层物理层对一系列(硬件)参数进行了规定,包含总线供电电压、接入系统设备数目、允许的连接器类型、线缆长度以及波特率等。
我们的物理层特性基本完全继承J1939物理层规范,相应的,参数基本与J1939保持一致。
比如CAN2.0B,接入系统的设备数目,最多30个;终端电阻阻值120欧姆,波特率250kbits,线束建议采用双绞线、同轴电缆等等。
1.3 应用层应用层主要规定的内容包括:标识符的分配,报文的发送和接收规则,系统内节点的优先级分配等等。
文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY-CAN-V1.00)版本记录版本制作者日期说明V1.00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System ,以下简称BMS)与电机控制器(Vehicle Control Unit ,简称VCU)、智能充电机(Intelligent Charger Unit ,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换。
本标准的CAN 标识符为29位,通信波特率为250kbps 。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆 控制器局域网络 第1部分:数据链路层和物理信令(Road Vehicles – Controller Area Network (CAN) Part 1:Data Link Layer and Physical Signalling). SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议 第11部分:物理层,250Kbps ,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair). SAE J1939-21:2006商用车控制系统局域网络(CAN )通信协议 第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
定义:P是优先级,R是保留位,DP是数据页,PF是PDU格式,PS是特定PDU,SA是源地址。
地址分配
补充说明:GPS模块在发送完控制数据帧0x1070D5C0后,立即开启超时判断,若在1s 内(超时时间可根据实际通讯状况作适当调整)未收到车身控制器应答数据帧0x1071C0D5即视为超时,GPS模块重发控制数据帧,若重发5次(重发次数可适当调整)后仍收不到应答数据帧,GPS停止发送控制报文,上报通讯超时到远程后台或手机终端。
寻车功能描述:车身控制器收到GPS模块发送的寻车命令后,执行相应操作,例如:报警器和左右转向灯分别周期性地响和闪烁5次后停止,响和闪烁的频率由车身控制器根据通常情况自定义。
实际寻车操作见协议报文内容。
文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY-CAN-V1.00)版本记录版本制作者日期说明V1.00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System,以下简称BMS)与电机控制器(Vehicle Control Unit,简称VCU)、智能充电机(Intelligent Charger Unit,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换。
本标准的CAN标识符为29位,通信波特率为250kbps。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆控制器局域网络第1部分:数据链路层和物理信令(Road Vehicles –Controller Area Network (CAN) Part 1:Data Link Layer and Physical Signalling).SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议第11部分:物理层,250Kbps,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair).SAE J1939-21:2006商用车控制系统局域网络(CAN)通信协议第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
纯电动车BMS与整车系统CAN通信协议书范本【注意:以下协议书范本仅为演示用途,实际情况可根据具体需求进行相应调整】一、引言本协议书旨在规范纯电动车电池管理系统(BMS)与整车系统之间的通信协议,确保两个系统之间的数据交换和信息传输的稳定和准确。
该通信协议基于控制器局域网(Controller Area Network,CAN)技术,并遵循相关国际标准。
本协议书适用于车辆制造商、BMS供应商以及相关技术人员。
二、通信协议规范1. CAN通信协议a. CAN通信速率:根据实际车辆需求确定,一般为250kbps或500kbps。
b. CAN物理层:遵循ISO 11898标准。
c. CAN帧格式:使用标准CAN 2.0A或CAN 2.0B帧格式。
d. CAN标识符:根据车辆厂商约定进行分配。
e. BMS节点:BMS设备在CAN总线上作为一个节点存在,使用独立的CAN标识符进行通信。
2. 数据格式a. 数据长度:BMS与整车系统之间交换的数据长度为8字节,每个字节包含8位。
b. 数据格式:BMS与整车系统采用统一的数据格式,包括数据类型、数据单位等信息。
具体格式由车辆制造商和BMS供应商协商确定。
3. 数据交互a. 数据采集:BMS负责采集电池相关参数,如电压、温度、电流等。
b. 数据传输:BMS将采集到的数据通过CAN总线传输给整车系统。
c. 故障诊断:整车系统可向BMS发送命令以获取电池状态、报警信息等。
d. 数据解析:整车系统根据协议定义解析接收到的数据,以确保准确读取和使用。
4. 错误处理a. 数据校验:BMS和整车系统使用CRC校验确保数据传输的准确性。
b. 异常处理:BMS和整车系统应具备异常处理机制,对通信错误和故障进行处理和报警。
5. 通信安全性a. 数据加密:可根据实际需求采用加密技术,确保通信数据的安全性。
b. 认证授权:BMS与整车系统之间的通信可采用认证和授权机制,确保只有合法的系统才能进行通信。
福田欧辉纯电动客车仪表通讯协议(V1.2)_20150922(草稿)编制:审核:审定:批准:北汽福田欧辉客车技术中心新能源所2015年09月22日更改历史1前言1.1 说明本文是福田欧辉纯电动客车整车通讯协议整车CAN总线通信协议文本。
内容包括:网络拓扑结构、节点地址分配、物理层、数据链路层、应用层协议等方面。
本文的读者包括:福田欧辉纯电动客车项目的具体实施者和参与者、将来负责对本协议进行维护和升级者。
1.2 协议中术语及缩写1.3 物理层要求物理层的规定主要参考CAN2.0B和J1939的相关规定。
物理层规范应符合ISO11898相关规定。
1.3.1上电初始化时间:对于所有的CAN节点低压上电,从上电时刻起到发送第一帧有效报文的推荐最大时间不要超过400ms。
1.3.2ECU电压监测:在整车系统电压工作范围内,所有ECU要保证CAN通信的可靠接收和发送。
当电压低于或高于正常供电电压范围时,要求ECU在200ms内禁止发送报文,且不能干扰总线通信。
当供电电压恢复到正常供电范围,在180ms ~400ms 时间内,ECU 进入网络激活状态,在此过程中ECU 不可干扰总线通信。
1.3.3各个部件建议选用多缓存的CAN 控制器。
1.3.4 电缆屏蔽层在车内连续导通,建议每个部件的网络插座均有屏蔽层的接头。
1.3.5 整车各ECU 均不能带120Ω的终端电阻,CAN 屏蔽线采用单点接地的方式接在车身地上,各个ECU 的CAN 屏蔽地接口均不接入CAN 屏蔽地。
1.3.6 内部CAN 的终端电阻由各系统自带(如有变动需根据双方协商沟通确定)。
1.3.7 整车各ECU 可正常工作,不能干扰整车其他部件正常工作; 1.4 数据链路层数据帧格式CAN 总线网络报文采用扩展帧格式,扩展帧格式如图1所示。
图1 扩展帧格式数据链路层中通过PDU 来组织一条报文的ID 和数据场中的内容。
PDU 将29位ID 划分为六个部分,分别是P ,R 位,DP 位,PF ,PS (可作为DA 或GE ),SA ,如图2所示。
文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY—CAN-V1.00)版本记录版本制作者日期说明V1。
00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System,以下简称BMS)与电机控制器(Vehicle Control Unit,简称VCU)、智能充电机(Intelligent Charger Unit,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换.本标准的CAN标识符为29位,通信波特率为250kbps。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆控制器局域网络第1部分:数据链路层和物理信令(Road Vehicles – Controller Area Network (CAN)Part 1:Data Link Layer and Physical Signalling).SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议第11部分:物理层,250Kbps,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair)。
SAE J1939-21:2006商用车控制系统局域网络(CAN)通信协议第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
纯电动乘用车CAN总线通讯协议(V1.0)编制:李冬明日期:2014.11.21.审核:日期:_批准:日期:_广东陆地方舟新能源汽车电驱动系统有限公司2014年11月版本历史一、通讯协议说明1、CAN通讯协议符合J1939;2、波特率:250K;3、CAN数据长度:8 Bytes;二、网络拓扑结构三、纯电动乘用车ECU节点定义四、CAN报文说明4.1 电机控制器报文(1)电机控制器报文1控制器状态:电机控制器故障代码:采用4位数值xxxx形式表示,其中xxxx使用十进制数值表示。
(2)电机控制器报文2(3)电机发送VCU报文电机及控制器状态(1表示有效,0表示无效)4.2、电池管理系统(BMS)通讯报文BMS报文1BMS报文2BMS报文3故障报警1:故障报警2:故障报警3:BMS状态:4.3、VCU通讯报文(1)VCU发送电机控制报文1电机工作模式指令(1表示有效或正常,0表示无效或故障)注:1)对直流电压限制值,驱动工况下为最低工作电压限制值,制动工况下为最高制动电压限制值。
2)对直流电流限制值,驱动工况下为最大输出电流限制值,制动工况下为最大回馈电流限制值。
(2)VCU发送BMS报文2电池工作模式指令(3)整车控制器报文3(3)整车控制器报文4附表:Byte3定义驾驶员操作状态Bit1 脚刹开关0 表示断开;1 表示闭合;Bit2 驻车开关0 表示断开;1 表示闭合;Bit3 手刹开关0 表示断开;1 表示闭合;Bit4~5 座椅安全带00B 表示断开;11B 表示全部闭合;01B表示驾驶员处未闭合;10B 表示乘员处未闭合附表:Byte4定义换挡器状态Bit1 AMT工作模式:0表示自动模式;1表示手自一体模式;Bit2:经济/运动模式开关:0表示经济模式;1表示运动模式;Bit3~4:保留Bit5~8:0000B:空挡;0001B:一档;0010B:二档;(0011B:三档;0100B:四档;0101B:五档… 以此类推)1111B:倒档。
纯电动车BMS和整车系统CAN通信协议书模板引言:BMS(电池管理系统)是一种用于监控和管理纯电动车辆电池状况的重要系统。
而CAN(Controller Area Network)通信协议则是一种用于在车辆内部各个控制模块之间进行高效通信的标准。
本文将针对纯电动车BMS和整车系统之间的CAN通信协议书进行模板的设计,以便更好地实现系统之间的数据交换和协作。
一、协议目的本协议的目的在于规范纯电动车的BMS与整车系统之间的CAN通信方式,并确保两者之间的数据传输准确、可靠,以实现整车系统的高效运行和保证行驶安全。
二、协议范围本协议适用于装配了BMS和整车系统的纯电动车辆。
三、通信协议1. CAN总线参数设置- 位率:根据系统要求设定合适的通信位率。
- 通信模式:采用标准模式(11位标识符)和扩展模式(29位标识符)根据具体需求进行选择。
- 传输层:采用CAN2.0B标准。
- 物理层:采用高速CAN物理层规范。
2. 帧格式- 纯电动车BMS与整车系统之间的CAN通信采用数据帧和远程帧。
- 数据帧分为标准帧和扩展帧,标识符按照具体应用场景进行定义。
3. 数据传输- 数据传输采用帧、命令和回复的方式进行。
- 帧:数据帧中包含需要传输的数据信息。
- 命令:整车系统向BMS发送指令,比如请求电池状态、请求电池温度等。
- 回复:BMS接收到命令后进行处理,并回复整车系统相应数据。
四、通信协议规范1. 标识符分配- 整车系统和BMS应进行标识符的分配,以确保通信双方能够正确识别和解析数据。
2. 命令与数据格式定义- 整车系统发送给BMS的命令应包含命令标识符和数据字段。
- BMS接收到命令后处理并回复数据给整车系统。
3. 错误处理- 在通信过程中,如出现通信错误或数据错误,应有相应的错误处理机制进行处理。
可以采用重传机制或其他错误处理方式。
五、状态转移图- 在整车系统和BMS通信中,可以使用状态转移图来描述不同状态间的转换关系,以及在每个状态下的数据交互过程。
纯电动乘用车CAN总线通讯协议(V1.0)编制:李冬明日期:2014.11.21.审核:日期:_批准:日期:_广东陆地方舟新能源汽车电驱动系统有限公司2014年11月版本历史一、通讯协议说明1、CAN通讯协议符合J1939;2、波特率:250K;3、CAN数据长度:8 Bytes;二、网络拓扑结构三、纯电动乘用车ECU节点定义四、CAN报文说明4.1 电机控制器报文(1)电机控制器报文1控制器状态:电机控制器故障代码:采用4位数值xxxx形式表示,其中xxxx使用十进制数值表示。
(2)电机控制器报文2(3)电机发送VCU报文电机及控制器状态(1表示有效,0表示无效)4.2、电池管理系统(BMS)通讯报文BMS报文1BMS报文2BMS报文3故障报警1:故障报警2:故障报警3:BMS状态:4.3、VCU通讯报文(1)VCU发送电机控制报文1电机工作模式指令(1表示有效或正常,0表示无效或故障)注:1)对直流电压限制值,驱动工况下为最低工作电压限制值,制动工况下为最高制动电压限制值。
2)对直流电流限制值,驱动工况下为最大输出电流限制值,制动工况下为最大回馈电流限制值。
(2)VCU发送BMS报文2电池工作模式指令(3)整车控制器报文3(3)整车控制器报文4附表:Byte3定义驾驶员操作状态Bit1 脚刹开关0 表示断开;1 表示闭合;Bit2 驻车开关0 表示断开;1 表示闭合;Bit3 手刹开关0 表示断开;1 表示闭合;Bit4~5 座椅安全带00B 表示断开;11B 表示全部闭合;01B表示驾驶员处未闭合;10B 表示乘员处未闭合附表:Byte4定义换挡器状态Bit1 AMT工作模式:0表示自动模式;1表示手自一体模式;Bit2:经济/运动模式开关:0表示经济模式;1表示运动模式;Bit3~4:保留Bit5~8:0000B:空挡;0001B:一档;0010B:二档;(0011B:三档;0100B:四档;0101B:五档… 以此类推)1111B:倒档。
纯电动车BMS与整车系统CAN通信协议随着电动车领域的快速发展,纯电动车的电池管理系统(BMS)和整车系统之间的通信协议变得越发重要。
BMS负责监控电池状态、控制充放电过程,并将相关信息传递给整车系统,以实现对纯电动车的全面控制和管理。
而整车系统则负责接收和解析BMS传递的信息,并作出相应的调控。
CAN通信协议,即控制器局域网通信协议(Controller Area Network),是一种广泛应用于汽车电子系统中的标准通信协议。
它采用差分信号传输,在高速和抗干扰性能方面优于其他通信协议,因此成为了纯电动车BMS与整车系统之间通信的首选协议。
CAN通信协议通过一对不同电压的差分信号来传递信息。
在CAN总线上,整车系统和BMS通过CAN节点来实现通信。
CAN节点可以是控制器、传感器、执行器等。
CAN通信协议有两种工作模式:基本帧格式(Standard Frame Format)和扩展帧格式(Extended Frame Format)。
基本帧格式用于低速通信,帧ID为11位;扩展帧格式用于高速通信,帧ID为29位。
CAN总线的通信速率可根据具体的需求设置,一般可达到1 Mbps。
在纯电动车中,BMS和整车系统之间的通信通过CAN总线进行。
BMS将电池相关信息(如电池状态、电流、电压等)发送给整车系统,以供整车系统做出相应的控制和管理。
而整车系统也可以向BMS发送指令,如设置电池充电电流、放电电流等。
为了确保通信的安全可靠,CAN通信协议还支持错误检测和纠正。
每个CAN节点都有一个唯一的地址(节点ID),用于识别发送和接收的信息。
在发送信息时,节点会将信息打包成帧,并附上CRC(循环冗余校验)码以进行错误检测。
接收节点在接收到信息后会进行CRC校验,若校验失败,则说明信息发生错误,可以进行相应的错误处理。
另外,纯电动车的BMS和整车系统之间的通信协议还应考虑一些特殊需求。
例如,BMS需要监测电池的温度和故障状态,并将这些信息传递给整车系统。