机电一体化第3章 伺服系统(1伺服系统概述)
- 格式:ppt
- 大小:1.63 MB
- 文档页数:27
伺服系统培训课程设计一、课程目标知识目标:1. 学生能理解伺服系统的基本概念,掌握其工作原理和组成结构。
2. 学生能掌握伺服系统中关键参数的计算方法,如转速、扭矩、精度等。
3. 学生了解不同类型伺服系统的特点及其适用场合。
技能目标:1. 学生能运用所学知识分析和解决实际伺服系统应用中的问题。
2. 学生具备设计简单伺服系统的能力,能根据需求选择合适的组件并进行调试。
3. 学生能熟练使用相关工具和设备进行伺服系统的安装、调试和维护。
情感态度价值观目标:1. 培养学生关注工程技术发展的意识,激发对伺服系统及其应用的兴趣。
2. 培养学生严谨、细致、负责的工作态度,增强团队协作和沟通能力。
3. 培养学生具备安全意识,遵循相关操作规程,确保伺服系统应用的安全可靠。
本课程针对高年级学生,结合学科特点,注重理论与实践相结合,以实际应用为导向。
课程目标旨在使学生掌握伺服系统的基础知识,具备实际操作和问题解决能力,同时培养良好的职业素养和安全意识。
通过课程学习,为学生未来在自动化、机器人等相关领域的发展奠定基础。
二、教学内容1. 伺服系统概述:介绍伺服系统的基本概念、发展历程、应用领域及发展趋势。
- 教材章节:第一章 伺服系统概述- 内容列举:伺服系统的定义、分类、工作原理。
2. 伺服系统组成与原理:分析伺服系统的组成结构,讲解各部分功能及相互关系。
- 教材章节:第二章 伺服系统的组成与原理- 内容列举:驱动器、执行器、反馈元件、控制器等组成部分及其工作原理。
3. 伺服系统关键参数计算:学习伺服系统中转速、扭矩、精度等关键参数的计算方法。
- 教材章节:第三章 伺服系统关键参数计算- 内容列举:转速与扭矩的计算、精度分析、系统稳定性分析。
4. 伺服系统类型及特点:介绍不同类型伺服系统的特点、优缺点及适用场合。
- 教材章节:第四章 伺服系统类型及特点- 内容列举:步进伺服系统、交流伺服系统、直流伺服系统等。
5. 伺服系统应用与案例分析:分析伺服系统在实际应用中的案例,提高学生的问题解决能力。

2.1 概述2.1.1 机电一体化对机械系统的基本要求1.高精度2.快速响应3.良好的稳定性2.1.2机械系统的组成1.传动机构 机电一体化机械系统中的传动机构不仅仅是转速和转矩的变换器,而且已成为伺服系统的一部分,它要根据伺服控制的要求进行选择设计,以满足整个机械系统良好的伺服性能。
2.导向机构 导向机构的作用是支承和导向,它为机械系统中各运动装置能安全、准确地完成其特定方向的运动提供保障,一般指导轨、轴承等。
3.执行机构 执行机构是用来完成操作任务的直接装置。
执行机构根据操作指令的要求在动力源的带动下完成预定的操作。
2.1.3机械系统的设计思想1. 静态设计静态设计是指依据系统的功能要求,通过研究制定出机械系统的初步设计方案。
2.动态设计动态设计是指研究系统在频率域的特性,借助静态设计的系统结构,通过建立系统各组成环节的数学模型,推导出系统整体的传递函数,并利用自动控制理论的方法求得该系统的频率特性(幅频特性和相频特性)。
2.2 机械传动设计的原则2.2.1 机电一体化系统对机械传动的要求机械传动是一种把动力机产生的运动和动力传递给执行机构的中间装置,是一种扭矩和转速的变换器,其目的是在动力机与负载之间使扭矩得到合理的匹配,并可通过机构变换实现对输出的速度调节。
2.2.2 总传动比的确定在伺服系统中,通常采用负载角加速度最大原则选择总传动比,以提高伺服系统的响应速度。
传动模型如图2-1所示。
图中各符号的意义如下:J m——电动机M的转子的转动惯量;θm——电动机M的角位移;J L——负载L的转动惯量;θL——负载L的角位移;T LF——摩擦阻抗转矩;i——齿轮系G的总传动比。
图2-1 电机、传动装置和负载的传动模型2.2.3 传动链的级数和各级传动比的分配1. 等效转动惯量最小原则齿轮系传递的功率不同, 其传动比的分配也有所不同。
1)小功率传动装置电动机驱动的二级齿轮传动系统如图2-2所示。

伺服系统包含哪些(基本组成_工作原理_应用)
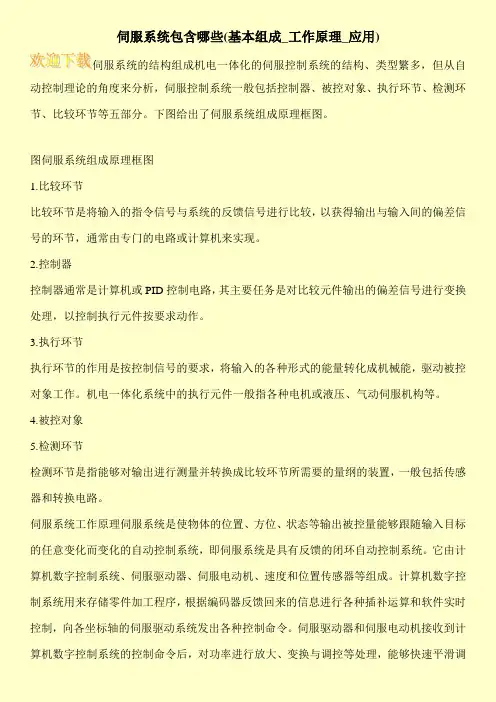
伺服系统的结构组成机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。
下图给出了伺服系统组成原理框图。
图伺服系统组成原理框图
1.比较环节
比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信
2.控制器
控制器通常是计算机或PID控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
3.执行环节
执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。
机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。
4.被控对象
5.检测环节
检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
伺服系统工作原理伺服系统是使物体的位置、方位、状态等输出被控量能够跟随输入目标的任意变化而变化的自动控制系统,即伺服系统是具有反馈的闭环自动控制系统。
它由计算机数字控制系统、伺服驱动器、伺服电动机、速度和位置传感器等组成。
计算机数字控制系统用来存储零件加工程序,根据编码器反馈回来的信息进行各种插补运算和软件实时控制,向各坐标轴的伺服驱动系统发出各种控制命令。
伺服驱动器和伺服电动机接收到计算机数字控制系统的控制命令后,对功率进行放大、变换与调控等处理,能够快速平滑调。

伺服系统组成、概述与控制原理(难得好⽂)伺服系统既可以是开环控制⽅式,也可以是闭环控制⽅式。
⼀、伺服系统简述伺服系统(servomechanism)指经由闭环控制⽅式达到对⼀个机械系统的位置、速度和加速度的控制。
⼀个伺服系统的构成包括被控对象、执⾏器和控制器(负载、伺服电动机和功率放⼤器、控制器和反馈装置)。
1. 执⾏器的功能在于提供被控对象的动⼒,其构成主要包括伺服电动机和功率放⼤器,伺服电动机包括反馈装置如光电编码器、旋转编码器或光栅等(位置传感器)。
2. 控制器的功能在于提供整个伺服系统的闭环控制如转矩控制、速度控制、位置控制等,伺服驱动器通常包括控制器和功率放⼤器。
3. 反馈装置除了位置传感器,可能还需要电压、电流和速度传感器。
下图为⼀般⼯业⽤伺服系统的组成框图,其中红⾊为伺服驱动器组成部分,黄⾊为伺服电机组成部分。
“伺服”——词源于希腊语“奴⾪”的意思。
⼈们想把“伺服机构”当成⼀个得⼼应⼿的驯服⼯具,服从控制信号的要求⽽动作:在讯号来到之前,转⼦静⽌不动;讯号来到之后,转⼦⽴即转动;当讯号消失,转⼦能即时⾃⾏停转。
由于它的“伺服”性能,因此⽽得名——伺服系统。
⼆、常⽤参数1、伺服电机铭牌参数1. 法兰尺⼨2. 电机极对数3. 电机额定输出功率4. 电源电压规格:单相/三相5. 电机惯量:分为⼤、中、⼩惯量,指的是转⼦本⾝的惯量,从响应⾓度来讲,电机的转⼦惯量应⼩为好;从负载⾓度来看,电机的转⾃惯量越⼤越好6. 电机出轴类型:键槽、扁平轴、光轴、减速机适配…7. 电机动⼒线定义:U: RED V:BLACK W: WHITE8. 额定转速9. 编码器线数:2500/1250/1000/17B/20B法兰是轴与轴之间相互连接的零件,⽤于管端之间的连接。
2、伺服驱动器铭牌参数1. 额定输出功率2. 电源电压规格3. 编码器线数3、伺服系统的性能指标1. 检测误差:包括给定位置传感器和反馈位置传感器的误差,传感器本⾝固有,⽆法克服;2. 系统误差:系统类型决定了系统误差。