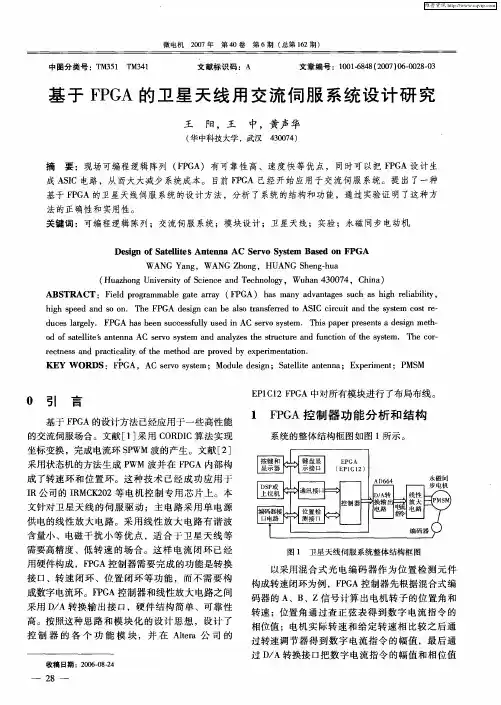
卫星天线伺服控制系统设计与开发
- 格式:pdf
- 大小:1.16 MB
- 文档页数:58
5.4米卫星接收天线方案1 天线子系统1.1 概述天线子系统按其功能划分为四个模块:天馈模块、座架模块、伺服控制模块、天线控制模块。
系统组成框图见图所示。
(1)天馈模块采用5.4米口径标准抛物反射面天线(包括反射面、背架、馈源支撑、中心体和背架等)以及L频段水平和垂直双极化组合馈源;(2)座架模块全动方位-俯仰回转体。
方位驱动在天线的颈部,使天线总体结构简捷、可靠,安装方便,配备工作平台,外形协调、美观、实用。
可拆除挂梯,避免无关人员进入,有利于保护射频、控制和回转机构等安全。
由于回转体的上移,立柱形式可以灵活、多变、由用户根据站址的具体安装架设条件而另行确定。
主要形式为圆柱形立柱。
(3)伺服控制模块天线控制器采用分布式设计以达到最少传输线缆和最大传输距离;(4)天线跟踪方式采用程序跟踪与自动相结合方式,并利用极大值法实时对轨道预报轨迹进行实时修正;(5)跟踪精度通过设计、工艺及调试保证天线跟精度达到0.050;(6)天线控制时间校准采用GPS时间校准;(7)天线控制器与站管计算机通过网口或串口,接收站管的调度管理;(8)安全保护装置采用了三级限位:一级为软限位,二级为电气限位,第三级为机械缓冲;天线具备任意位置锁定能力。
图6.3-3天线子系统组成框图卫星接收天线需持续、稳定、可靠、高效地控制天线接收和处理卫星信号,在正常运转情况下无天线跟踪失锁、数据包丢失、丢线、噪点过多等影响卫星遥感监测业务开展的现象,天线过顶时无丢包、丢线现象。
其主要功能如下:(1)根据卫星实际飞行轨道对静止卫星进行跟踪; (2)天线具有程控跟踪、手动跟踪、收藏等功能;(3)天线监控计算机具有与站运行管理分系统通讯的能力等; (4)能满足接收FY-4卫星下传的L 频段垂直、水平信号的功能; (5)具备垂直/水平双极化同时工作的能力; (6)具备数据解码、网口进机的功能;(7)设备具备自检、测试功能、GPS 或北斗校时功能; (8)可通过监控机进行设备配置、参数设置、工作状态监视等操作;(9)对后续地球静止同步轨道航天器信号具备可扩充性,便于系统升级。
| 工程技术与应用| Engineering Technology and Application·24·2016年10月卫星天线伺服控制系统研究景丹玉,韩 刚(91917部队,北京 102400)摘 要:在进行卫星通信过程中,天线的快速、准确、精密、稳定将会直接决定其通信质量的高低,因此需要采取措施构建一个安全、可靠、稳定的通信链路,以确保其通信过程的顺利进行。
文章对卫星天线伺服控制系统给予介绍和探讨。
关键词:卫星天线;伺服控制系统;工作原理;数学模型中图分类号:TN828.5 文献标志码:A 文章编号:2096-2789(2016)10-0024-011 卫星天线伺服控制系统简介1.1 卫星天线伺服系统的工作原理在进行卫星天线伺服系统设计过程中,要按照星载计算机预先设定的天线转向命令,来使两个方向天线转向设定的位置,从而进行数据传输任务。
其卫星天线系统常用频段主要有C、Ku、Ka等。
而卫星电视广播常选择C 频段。
Ka频段主要是向客户提供千兆比特级的数字传输、高速的卫星通信、高清数字电视以及一些个人通信业务。
以Ku频段的机载卫星天线伺服控制系统为例,它可以高精度的快速、准确的实现对目标卫星的校正,构建安全、稳定的持续信号输出链路,以实现通信服务。
天线平台和伺服平台是双系统的两种平台体制,后者具有两个不同的正交自由的天线座,分别是俯仰天线座和方位天线座。
与单平台的设计方案相比,上述结构的设计不仅可以有效提高伺服系统的带宽范围,而且还能够在一定程度上提升系统的谐振效率。
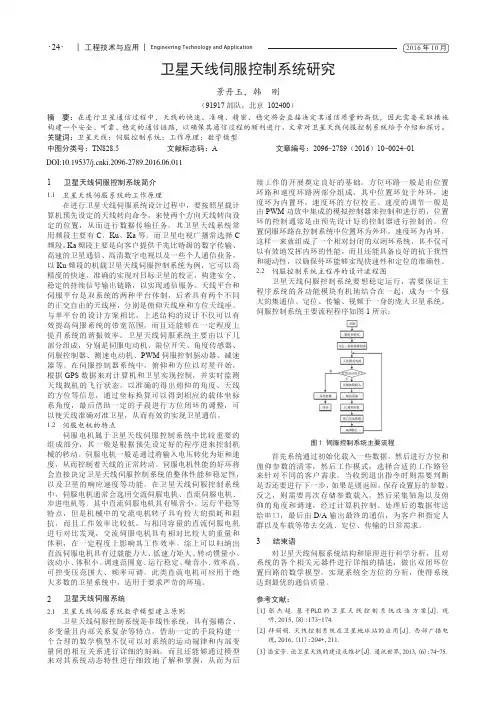
卫星天线伺服系统主要由以下几部分组成,分别是伺服电动机、限位开关、角度传感器、伺服控制器、测速电动机、PWM伺服控制驱动器、减速器等。
在伺服控制器系统中,俯仰和方位以对星开始,根据GPS数据来对计算机和卫星实现控制,并实时监测天线载机的飞行状态,以准确的得出俯仰的角度、天线的方位等信息,通过坐标换算可以得到相应的载体坐标系角度,最后借助一定的手段进行方位闭环的调整,可以使天线准确对准卫星,从而有效的实现卫星通信。
2012年4月内蒙古科技与经济A pril 2012 第7期总第257期Inner M o ngo lia Science T echnolo gy &Economy N o .7T o tal N o .257基于单片机的卫星天线伺服系统邢建钢,田世军(内蒙古广播电影电视局501台,内蒙古呼和浩特 010070) 摘 要:介绍了卫星天线伺服系统的主要任务是使天线快速而准确地转动到应对准的目标卫星。
针对各个跟踪系统的方案所具有的各自不同的针对性,探讨了天线伺服系统的最佳方案。
关键词:卫星天线;稳定控制系统;单片机;步进电机 中图分类号:T M 383.6∶T N 828 文献标识码:A 文章编号:1007—6921(2012)07—0069—021 卫星天线伺服系统的硬件设计1.1 天线及其控制器硬件设计硬件是指单片机微处理器及其外围设备之和,包括:中央处理器、存储器、显示器、人机对话的键盘、D /A 转换器、A /D 转换器、接口电路和驱动电路等。
微处理器是整个跟踪系统程序执行的核心,它负责完成被控对象的各种参数的判断、监控和处理;微电脑的接口是信息的传输通道,其主要作用是微处理器通过传输通道将电信号转换成各种驱动信息,来完成对外设的控制动作,其次是主机与外设之间负载的匹配、电平的转换和电器隔离等。
执行机构是机械部分包括各种继电器、电机、电磁铁等。
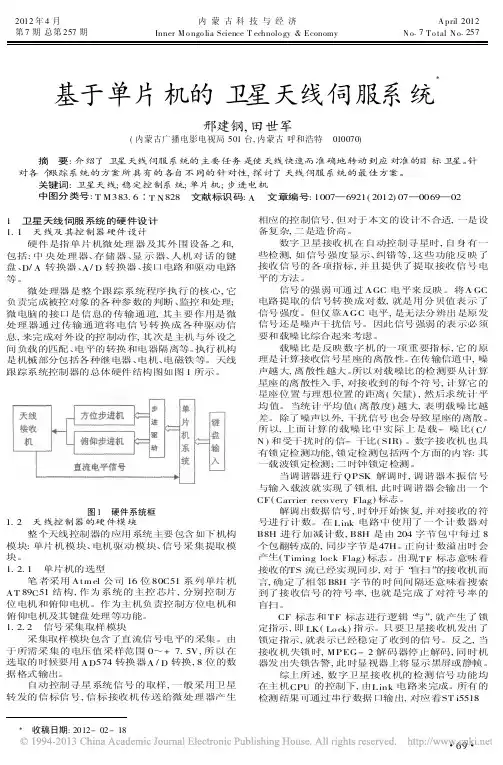
天线跟踪系统控制器的总体硬件结构图如图1所示。
图1 硬件系统框1.2 天线控制器的硬件模块整个天线控制器的应用系统主要包含如下机构模块:单片机模块、电机驱动模块、信号采集提取模块。
1.2.1 单片机的选型笔者采用At m el 公司16位80C51系列单片机AT 89C 51结构,作为系统的主控芯片,分别控制方位电机和俯仰电机。
作为主机负责控制方位电机和俯仰电机及其键盘处理等功能。
1.2.2 信号采集取样模块采集取样模块包含了直流信号电平的采集。
伺服控制器在航空航天领域的应用简介简介:伺服控制器是一种用于控制和驱动伺服电机的电子设备。
在航空航天领域,伺服控制器发挥着重要的作用。
它们被广泛应用于航空航天器、导弹、卫星等空中和太空探索任务中的各种应用。
本文将介绍伺服控制器在航空航天领域的应用及其重要性。
1.导航和飞行控制:伺服控制器在飞机和其他航空器的导航和飞行控制系统中起着关键作用。
航空航天器的导航系统需要准确地测量飞行姿态、位置和速度,并进行实时调整。
伺服控制器通过控制伺服电机的转动来实现飞行器的稳定性和姿态控制。
它们能够根据飞行数据进行准确的修正,并调整飞行器的角度、位置和速度,确保飞行的安全和平稳。
2.地面控制系统:在航空航天领域中,地面控制系统扮演着重要的角色,用于监控和控制航空航天器的飞行。
伺服控制器广泛应用于地面控制系统中,通过远程控制机构、执行命令以及对飞行器进行实时状态监测和故障检测。
伺服控制器在地面控制系统中起到了连接和协调的作用,确保飞行器能够正常工作和完成任务。
3.卫星通信系统:在航空航天领域中,卫星通信系统对于空中和太空任务的成功至关重要。
伺服控制器用于控制卫星的定位和稳定,确保通信天线能够准确对准地面目标。
伺服控制器通过控制卫星的姿态和方向,使卫星能够稳定地保持与地面通信站点的联系。
它们确保了高质量的通信信号传输,提高了通信系统的可靠性和效率。
4.空间探测任务:伺服控制器在航天领域的空间探测任务中也发挥着重要作用。
例如,探测器和卫星需要精确的定位和导航能力,以便在太空中准确地执行任务。
伺服控制器用于控制太阳能电池板的方向和角度,以及控制航天器的定位和速度。
它们帮助探测器保持稳定和精确的运行状态,以收集和传输重要的科学数据。
总结:伺服控制器在航空航天领域的应用起到了关键的作用。
它们在飞行控制、导航和定位、通信系统以及空间探测任务中发挥着重要的功能。
伺服控制器通过精确控制伺服电机的运动,确保了航空航天器的稳定性、安全性和准确性。
卫星地球站7.3米天线伺服系统的升级改造【摘要】安徽广播电视卫星地球站7.3米天线是1997年建站时架设的,其天线的控制伺服系统已运行了10多年之久,存在显示参数不稳定和没有自动步进跟踪等诸多的缺陷,严重影响了7.3米天线跟踪对准卫星的精度,已难以满足转星后的安全播出工作要求。
地球站经过多方考量,对7.3米天线控制伺服系统进行升级改造,改造后的系统使天线定位控制精度更高、操作更方便,为地球站安全播出工作提供了更加可靠的保障。
【关键词】天线;控制;精度;改造我站的7.3米备份天线是1997年建站时架设的,其天线的控制伺服系统已运行了10多年之久,存在显示参数不稳定和没有自动步进跟踪等诸多的缺陷,严重影响了7.3米备份天线跟踪对准卫星的精度,已难以满足转星后的安全播出工作要求。
在2007年转星调整结束后,我站经过细致的研讨和周密的考量,对7.3米天线控制伺服系统进行了全面的升级改造。
1 天线伺服系统的功能卫星发射天线伺服系统是针对卫星通信开发的天线控制系统,它是以单片机或工业计算机作为控制主机,通过自动控制单元对跟踪接收机输出的信号处理,控制电机转动,使天线自动跟踪指向卫星,从而保证卫星信号的精确定点发射和优质接收。
控制系统应具有界面友好、操作简便、可靠性高等优点。
2 原7.3米伺服系统所存在的问题和不足我卫星站1997年建站初安装的7.3天线伺服系统是由电子工业部三十九所提供的,该系统在多年的使用后,我站感到存在以下几方面的缺陷和不足:2.1 遥控界面显示不够准确原系统自动控制单元的操作界面显示的天线实时的俯仰角和方位角等参数值准确度不够,显示数据常常在较大范围内来回跳动,不能精确并稳定地显示出当前天线系统的相关参数,从而影响技术人员的判断和操作。
2.2 缺少本控操作的配置原系统可通过自动控制单元对天线进行遥控驱动,而自动控制单元安装在播控机房,对于天线的日常监控和校准操作来说是十分方便的,但如果遇到恶劣天气或检修维护天线需大范围转动天线时,若能直接在天线旁边直观地控制和驱动天线则更为有利,曾经就有一卫星站在遥控转动天线时因无法直接看到天线的转动情况导致转过硬限位出现轴杠脱落的事故。
浅谈卫星天线伺服控制系统摘要:随着社会的不断发展,人们对于卫星通信服务的需求越来越大,甚至人们的生活已经无法脱离卫星通信服务,在这样的背景下,必须要对卫星天线伺服控制系统进行进一步的研究,从技术层面保障人们的卫星通信需求为人类科技的进一步发展作出贡献。
为此,本文将简单探讨卫星天线伺服控制系统的相关内容。
关键词:卫星天线;伺服控制系统;卫星通信引言:卫星通信主要是利用中低轨道的卫星作为中继站,接收来自范围内的语音通信,并将信号转发给对应的接收目标。
随着卫星通信的不断发展,除了原有的语音通信功能之外,卫星还实现了全球范围内的通信功能,除此之外,所衍生出的全球定位系统也成为了人类日常生活和各行各业发展的重要技术,在军事、生产和交通领域。
产生了极为深远的影响。
伺服控制系统是机载卫星在运行过程中的一项重要系统,它能够保障地面目标与机载卫星之间实现实时连接,因此研究伺服控制系统对于卫星通信的发展有很大的帮助。
1.相关概述1.伺服控制系统的概述伺服控制系统是一项自动化控制系统,它是指通过机械位置和角度的方式对系统实现自动化控制的系统,该项技术被广泛应用于卫星通信或机械制造中,能够实现对控制目标进行准确快速定位的作用。
伺服控制系统相较于其他的自动化控制系统,在控制过程中具有响应速度快、定位足够准确、转动惯量较大的优点,为了满足伺服控制系统的工作,通常要配备专门的伺服电机,伺服电机的驱动单元便称之为伺服驱动单元[1]。
1.卫星伺服控制系统的原理为了满足卫星天线的特殊需求,要在将伺服控制系统设计在卫星天线的转向中,而在对卫星天线进行伺服系统的开发设计时,要根据卫星的星载计算机设置而满足工作目标。
通常要想实现卫星天线更快更精准的对准目标卫星,通常需要对其建立两个方位的伺服平台的天线座,从方位和仰俯两个角度实现天线方位自由自动化控制。
目前我国所采用的卫星天线伺服控制系统。
常见的频段包括Ka、Ku和C频段,C频段主要是卫星广播电台在使用,在电视频道或电台频道这些信号需求量较小的地方,通常会借助C频段实现较的数字业务传输。
卫星轨道控制系统设计与研究第一章:引言1.1 研究背景卫星轨道控制系统是指通过对卫星的姿态、轨道和能量等方面的控制,使卫星能够满足特定任务需求,并保持良好的工作状态。
随着卫星应用的广泛发展,卫星轨道控制系统的设计和研究变得非常关键。
1.2 研究目的和意义卫星轨道控制系统的设计与研究旨在提高卫星的定位精度、运行稳定性和任务执行能力,进而保证卫星正常工作。
该研究的意义在于为卫星应用领域提供强有力的技术支持,推进卫星技术的快速发展。
第二章:卫星姿态控制系统设计2.1 卫星姿态控制系统概述卫星姿态控制系统是卫星轨道控制系统的核心部分,通过对卫星的姿态进行控制,确保卫星能够正确朝向目标,并保持稳定状态。
2.2 卫星姿态传感器卫星姿态传感器用于测量卫星在空间中的姿态信息,包括角速度、角度和姿态矩阵等。
常用的卫星姿态传感器有星敏感器、陀螺仪和磁力计等。
2.3 卫星姿态控制器卫星姿态控制器根据姿态传感器获取的数据,计算并控制卫星的姿态。
常用的卫星姿态控制方法有主动控制和被动控制两种。
2.4 卫星姿态控制算法卫星姿态控制算法是卫星姿态控制的核心技术,包括PID控制、最优控制以及自适应控制等方法。
不同算法适用于不同的卫星任务和需求。
第三章:卫星轨道控制系统设计3.1 卫星轨道控制系统概述卫星轨道控制系统通过对卫星的速度和轨道参数的控制,确保卫星能够按照预定轨道运行,完成特定的任务。
3.2 卫星轨道控制器卫星轨道控制器根据轨道控制要求,计算并控制卫星的速度和轨道参数。
常用的卫星轨道控制方法有推力控制和姿态控制两种。
3.3 卫星轨道测量技术卫星轨道测量技术用于测量和监测卫星在轨道上的位置和速度参数。
常用的卫星轨道测量技术包括GPS定位、星载测距和星基测距等。
3.4 卫星轨道模拟与优化设计卫星轨道模拟与优化设计是卫星轨道控制的重要环节,通过仿真和优化分析,选择最佳的轨道参数和控制策略,以提高卫星运行的效率和精度。
第四章:卫星能量控制系统设计4.1 卫星能量控制系统概述卫星能量控制系统是保证卫星能够正常运行的重要组成部分,主要包括电源系统和能量管理系统。
某卫星通信天线伺服系统的设计与实现章百宝;陈涛【摘要】To realize the rapidity and veracity of aligning with the satellitefor vehicle⁃mounted satellite communication an⁃tenna,a satellite communication antenna servo system with DSP+FPGA as its control core was designed. The composition,working principle and hardware block diagram for the system are described. The parameters of motor are calculated particularly. The pro⁃cess of the antenna′s satellite founding and servo control algorithm are elaborated and designed. The implementation of the servo system is helpful to cost reduction of satellite communication system,and the rapidity and veracity improvement of aligning with the satellite.%为实现车载卫星通信天线对星的快速性和准确性,设计了一套以DSP+FPGA架构为控制核心的卫星通信天线伺服系统,介绍了该系统的组成、工作原理及硬件原理框图,并对电机选型参数做了详细计算,对天线寻星过程和伺服控制算法做了详细描述和设计。
该伺服系统的设计与实现对降低卫星通信系统成本、提高卫星通信天线对星的快速性和准确性具有一定的工程参考价值。