一种无人机通信天线伺服系统的构建
- 格式:pdf
- 大小:416.96 KB
- 文档页数:6
无人机通信网络建设方案研究近年来,随着无人机技术的发展和普及,无人机通信网络的建设也成为了不少科技公司和政府部门的研究方向。
从静态的地面通信网络到动态的空中通信网络,无人机通信网络不仅具备广阔的应用空间,也能满足未来高速互联网服务的需求。
本文将探讨无人机通信网络的建设方案,重点从无人机网络的性能、覆盖范围和安全性等方面进行分析。
一、无人机网络的性能分析作为一种新兴的通信技术,无人机网络具有传输速度快、延迟低等明显的优势。
因为从无人机到地面的数据传输不需要经过地面网络的各种中转设备,所以通信延迟低,而且无人机相较于直接部署在地面的通信设备来说,其高度和视野更为广阔,可以充分利用这个优势实现长距离数据传输。
此外,无人机还可以通过多点定位技术来支持组网,保障通信更加可靠和稳定。
但需要注意的是,无人机网络在通信过程中依然存在一些挑战,如信道干扰、场景变化等,因此需要引入一些增强技术来提升性能。
例如,可以采用信道编码和分集技术来减小信号干扰和损坏;同时,使用多通道技术可以增加信道的传输带宽,从而提升数据的传输速度。
二、无人机网络的覆盖范围无人机网络的覆盖范围与以下几个因素密切相关:设备性能、信道选择和部署策略等。
设备性能:无人机的载荷能力、高度、速度等设备性能都会影响网络的覆盖范围。
通过提升设备性能,可以增加无人机的传输能力和覆盖范围。
信道选择:选择合适的信道也能提升无人机的覆盖范围。
专业的无人机通信业务通常采用无线电和光学通信,这些通信手段都可以利用不同的频段来实现高速数据传输。
因此,选择合适的频段进行通信,才能保证设备的性能和通信范围。
部署策略:部署策略也是影响无人机网络覆盖范围的关键因素之一。
根据实际的通信需求,选择合适的部署策略。
例如,在公共安全领域,可以选择集中部署,由大型基站以点对点链路连接各个部门,同时也可以布置多台小型无人机,以覆盖更广阔的区域。
三、无人机网络的安全性无人机网络的安全性是无人机通信网络更加可靠和稳定的保障。
无人机通信场景下的信道建模与仿真摘要:无人机通信场景下的信道建模与仿真是目前研究的热点和难点。
因为无人机通信面临诸多挑战,如通信距离远、受干扰频繁、传输速率快等。
通过对无人机通信信道建模,可以更好地掌握通信信道特性,优化信号传输方案,提高通信可靠性和效率。
本文主要介绍了无人机通信场景下信道建模的基本概念、分类、研究方法及仿真结果。
在信道建模方面,首先介绍了多径传播模型、大气传输模型和电离层传输模型,并详细分析了它们的特点和适用场景。
在仿真方面,采用MATLAB编程,搭建了无人机通信场景下的信道模型,从不同维度分析了信噪比、误码率、传输速率等指标,并进行了模拟实验验证。
通过对仿真结果的分析,得出了在无人机通信场景下的信道特性和性能规律,为实际应用中的无人机通信技术提供了理论支撑。
关键词:无人机通信;信道建模;多径传播模型;大气传输模型;电离层传输模型;MATLAB仿真一、引言随着无人机技术的不断发展,无人机的应用范围也越来越广。
无人机通信在军事、民用等领域都有着广泛的应用场景,例如情报侦察、物资运输、搜索救援、航拍测绘等。
而无人机通信面临的主要挑战就是信道传输的稳定性和可靠性。
因此,进行无人机通信信道建模和仿真是非常必要的。
二、无人机通信信道建模的基本概念无人机通信信道建模是指对无人机通信信道特性的建立和研究。
通信信道是指将信号从发送端传输到接收端的传输媒介。
因为无人机通信面临复杂的环境和场景,例如大气、地面散射等,因此信道建模显得尤为重要。
信道建模可以从多个维度来研究,例如信道的多径传播、大气传输、电离层传输等特性。
在信道建模的过程中,需要对信号传输过程中遇到的各种因素进行建模和分析,这样就可以优化无人机通信的传输方案,提高通信可靠性和效率。
三、无人机通信信道建模的分类和研究方法1. 多径传播模型多径传播模型是指信号在信道中出现的多种路径。
在无人机通信中,由于无人机往往离地面较高,因此存在大量的空间障碍物,例如楼房、山脉等,这样就会使信号出现多道路径。
天线在无人机通信中的应用是什么?一、提升无人机通信效果的天线设计在无人机通信中,天线的设计起着至关重要的作用。
一方面,科学合理的天线设计可以提高无人机的信号接收和发送能力,从而扩大通信范围和提升通信质量。
另一方面,优化的天线设计可以减小无人机的体积和重量,提高其灵活性和机动性。
因此,天线设计必须兼顾信号性能和空间限制,采用合适的天线类型和结构,以最大化通信效果。
1. 天线类型无人机通信中常用的天线类型包括定向天线、全向天线和增益天线。
定向天线适用于远距离通信,其特点是信号集中且强度高,但通信范围有限。
全向天线适用于近距离通信,其特点是信号覆盖范围广,但信号强度相对较弱。
而增益天线则是在定向天线和全向天线之间的折中选择,它具有较强的信号传输能力和适中的通信范围。
2. 天线结构天线结构的设计也对无人机通信性能有着重要影响。
常见的天线结构包括单极子天线、双极子天线和微带天线等。
单极子天线结构简单,适用于低频率通信,但其通信距离有限。
双极子天线结构复杂,适用于高频率通信,其通信距离较长。
而微带天线则以其小型化、轻量化和多频段适应性等特点,成为无人机通信中的理想选择。
二、天线技术在无人机通信中的应用天线技术广泛应用于无人机通信中,为其提供了强大的信号接收和发送能力。
通过采用先进的天线技术,可以提高无人机通信的稳定性、可靠性和安全性。
1. 自适应天线技术自适应天线技术可以通过优化天线结构和信号处理算法,自动感知无人机周围的通信环境,实现功率控制和动态波束成形等功能。
这种技术可以提高无人机通信系统的抗干扰性和自适应能力,保证通信质量和稳定性。
2. 多天线技术多天线技术是通过在无人机上部署多个天线,利用空间多样性来提高通信效果。
多天线技术可以有效抑制信号的多径传播效应和干扰信号,提高通信信号的可靠性和传输速率。
此外,多天线技术还可以实现天线分集和天线合成,进一步提升无人机通信系统的性能。
三、天线对无人机通信的影响天线对无人机通信的影响不容忽视。

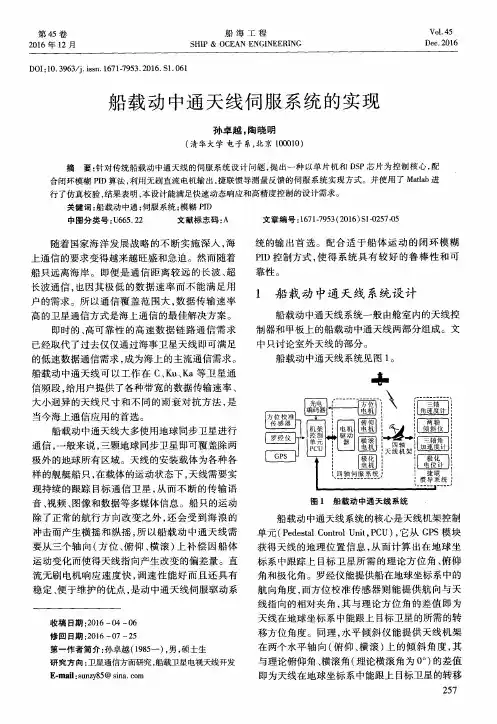
图l全系统原理框图站位置和车头方向的数据,电动机控制器、位置编码器、伺服电机构成了伺服回路,带动减速器驱动转台旋转,光电开关是初始化时使天线对准车头的基准限位,并在运行过程中可以消除位置编码器累计误差。
为实现转台任意旋转,系统中选用高频导电滑环进行转台上下两端的信号传输。
2系统方案2.1转动角解算川在无人机(UAV)当前经纬度、本地经纬度、车头方向都已知的条件下,就可以利用图2所示关系求得无人机与车头方向的夹角,通过位置编码器可知当前天线方向,即可知天线转动角度。
图2指向角度关系也)图2所示的跟踪指向角A:推导过程如下:(1)先将无人机经纬度转换到地心坐标系。
fx21f(Ⅳ2+也)co&勋。
也21y2l=l(Ⅳ2+巩)cosB2si吐:(1)【历J【【北(1一e2)+日2】si曲2J其中,Ⅳ2=Ⅱ/、/T刁丽,口为长半轴,e为偏心率。
(2)再转换到以地面站为原点、东向为X轴方向、北《电子技术应用》2009年第6期向为y轴、垂直地面为Z轴的坐标系上。
f钇1fx2一(Ⅳl+Ⅳ1)co嘏1co正I1I弛I=A’1}y2一(Ⅳl+H1)cosBlsinLlI【:2J【z2一【Ⅳl(1一e2)+日1】sin81Jf—si曲co吐一si以co嘏co也1A=I—si曲co吐co止co嘏si以l【cos日0sin曰Jarctan(弛,茗2)(2)(3)(4)通过式(3)即可得到方位角A,,其中r为无人机与地面站距离。
2.2伺服电机控制【2-4】该天线转台伺服是一种位置伺服控制,系统结构如图3所示。
为保证转动力矩平稳,无刷电机的线圈电流采用比例一积分PI反馈控制,PI控制就能保证很好的力矩控制特性。
而位置控制则采用比例一积分一微分(PID)反馈控制,加入积分可以消除位置误差。
●-----.….-------·----·….-。
图3转台伺服控制系统结构为保证位置伺服的平稳运行,避免急动急停给天线带来冲击,故伺服过程中加速度、转速、转角随时间变化如图4所示。
此外,对于控制器PID参数可以参考表ln乃死时fHj£图4加速度、转速、转角随时间变化曲线一种无人机通信天线伺服系统的构建作者:黄伟, 周乃恩, 王诚, 李江宏, HUANG Wei, ZHOU Nai En, WANG Cheng, LI Jiang Hong作者单位:中国航天十一院,第十一总体部,北京,100074刊名:电子技术应用英文刊名:APPLICATION OF ELECTRONIC TECHNIQUE年,卷(期):2009,35(6)被引用次数:0次1.徐绍铨.张华海.杨志强GPS测量原理及应用 19982.金石.张晓林.马文智一种无人驾驶直升机天线跟踪系统的研制[期刊论文]-北京航空航天大学学报 2003(04)3.卢飞星.亓迎川.牛全民单片微机控制雷达天线控制系统的设计[期刊论文]-现代雷达 1999(04)4.林宏斌数字角跟踪系统设计 1990(03)1.期刊论文许宗飞.袁冬莉.刘小俊.Xu Zongfei.Yuan Dongli.Liu Xiaojun基于GPS射频模拟信号源的无人机导航系统研究-计算机测量与控制2010,18(3)为了在室内验证卫星导航功能,采用飞机模型计算机、GPS硬件仿真器和GPS射频模拟信号源,提出了一种模拟卫星动态绝对定位的设计思想;根据导航计算需要,对系统中涉及到的不同坐标系进行转换;搭建半物理仿真平台,给出无人机自主导航的验证方案;仿真结果表明,基于GPS射频模拟信号源的无人机导航验证方法切实可行,导航系统具有良好的稳定性.2.期刊论文晋志普.陆文娟.朱纪洪.李冬用无人机 GPS系统对雷达进行精度评定的方法-清华大学学报(自然科学版)2001,41(9)提出了一种新的雷达精度评定方法,即利用搭载全球定位系统(GPS)的小型无人机做为雷达的跟踪目标,对雷达测量精度进行评定.在研究评定方法的基础上,分析了数据处理方法和雷达评定工作对GPS系统定位精度的要求.为了提高无人机的定位精度,系统采用了差分GPS定位技术,即根据地面基准站测量GPS的定位误差来修正无人机的测量结果,并采用Kalman滤波方法来抑制观测噪声,进一步提高无人机的定位精度.仿真测试表明,这种方法可以满足雷达评定的精度要求,同时具有简单、经济、可靠的优点.3.学位论文龚真春GPS在微型无人机导航定位中的研究与应用2005微型无人机在军事和民用方面都具有广泛的应用价值,长期以来都是国内外很多机构和组织的热点研究项目.导航与定位系统在微型无人机自主飞行中占有重要的地位.本文侧重于微型无人机导航定位系统的研究与应用.限于微型无人机对导航器件的体积、重量和成本的要求,用于大型无人机的导航方法无法在微型无人机上使用.本文在考虑微型无人机特点及其对导航定位需求的基础上,研究了全球定位系统GPS在其导航定位中的应用.论文首先回顾了目前采用的导航定位方法,介绍了卫星导航定位的发展历程,给出了微型无人机导航定位系统的构成.第二章重点阐述了GPS的组成和导航定位原理.为提高GPS导航定位精度,在第三章中着重介绍了几种差分GPS定位模型,并对差分GPS基准站坐标的精确测定进行了研究,利用现有GPS设备对基准站的坐标进行了测定试验,给出了实验结果.第四章主要讨论了如何将GPS导航定位结果转换为用户实用坐标的问题.对实际的微型无人机导航用到的坐标转换公式作了一些合理的简化,给出了实时动态定位坐标转换公式,并对这些坐标转换公式的有效性和实用性进行了相应的论证.第五章针对GPS和惯性导航定位的各自不足之处,研究了GPS/MIMU组合导航系统,实验仿真结果表明,该组合导航系统在精度和可靠性方面,较单一的导航系统都有明显的改善,并且提高了可靠性和抗干扰能力.在本篇论文的最后,就微型无人机导航定位系统的下一步工作做了一定的探讨和展望.4.期刊论文陈鹏.闫建国.曾赟.CHEN Peng.YAN Jian-guo.ZENG Yun DSP和TL16C752在无人机GPS导航系统中的应用-测控技术2009,28(2)针对某无人机导航系统通信数据量大、实时性高,GPS信息关键的特点, 设计了一种基于DSP和外扩串口收发芯片TL16C752的GPS数据接收方案:包括硬件接口电路和软件实现.介绍了TL16C752的特点和使用方法,选择GARMIN的GPS15L接收机,解决了因为DSP的两个UART异步通讯串口中断级别比较低,容易被其他系统或外设中断的问题,提高了中断级别,保证了GPS数据的完整性.实际飞行实验证明该方法实现了无人机GPS定位数据的接收,系统简单,可靠.5.期刊论文王小斌.闫建国.凌琼.Wang Xiaobin.Yan Jianguo.Ling Qiong基于GPS仿真器的无人机导航系统半物理仿真研究-计算机测量与控制2008,16(3)讨论了无人机导航半物理仿真系统中GPS仿真器的设计方法;根据GPS接收机输出信息的特点和WGS-84与各种坐标系的转换关系,将飞机模拟系统解算得到的无人机位置信息转换成与之对应的GPS信号传输到导航链路,用于无人机航迹控制;根据导航飞控系统功能的要求,构建了一个半物理仿真平台来验证此系统,试验结果证明了采用模拟GPS仿真器完全可以对导航软件的功能进行有效的验证,并达到了预期设计要求.6.学位论文周树春基于GPS的无人机自动着陆控制系统设计与实现2007论文跟踪国际国内无人机自动起飞和着陆技术的最新发展趋势,结合具体项目,在充分掌握无人机建模和仿真系统相关理论地基础上,解决了无人机高精度进场着陆导引控制、无人机起降滑跑建模与模型分析、无人机地面滑跑综合自动控制、无人机着陆轨迹跟踪与发动机综合控制等关键技术,采用MATLAB/Simuliflk/Stateflow仿真工具建立了相应的仿真模型和完整的系统仿真平台。
论文的主要研究成果如下:一、差分GPS建模方面:建立了差分GPS误差模型。
该模型是在分析对比各种差分GPS定位原理基础上,根据产生误差的不同类型建立的。
二、系统建模方面:以无人机为对象,建立了无人机起飞和着陆的非线性仿真模型,并运用小扰动方法对其进行线性化。
同时,本论文在参考相关资料的基础上,建立了无人机地面滑跑模型。
三、无人机自动着陆部分:分别设计了下滑轨迹跟踪控制系统、四次曲线拉平控制系统及侧向偏离修正控制系统。
该系统采用经典控制律设计方法,利用差分GPS信号作为导引信号,并满足相关标准规定的控制系统性能要求;设计了无人机的地面滑跑纵向和侧向控制系统。
该系统采用升降舵控制、阻力方向舵控制、操纵前轮偏转和操纵后轮刹车等控制方法。
为了验证系统的鲁棒性,在所设计的控制系统中加入了几种常见的风干扰。
四、无人机自动起飞部分:分别设计了无人机地面滑跑控制系统和拉起爬升控制系统,并设计了相应的控制律。
本论文设计了无人机自动起飞和着陆控制系统的一种方案,仿真结果表明所设计的自动控制系统基本符合要求。
相信本论文所做的工作会对我国今后无人机自动起降技术的发展提供有益的参考。
7.期刊论文张剑锋.刘秉华.ZHANG Jian-feng.LIU Bing-hua基于GPS/航路推算的无人机导航与控制研究-弹箭与制导学报2007,27(4)给出了一种小型隐身性无人机的平面导航与控制方案.基于GPS/航路推算组合导航方法,文中利用Matlab的SimuLink工具箱建立了无人机六自由度模型,设计了相应的水平控制与导航方案,给出了一种风场估计方法以及风场下的航迹修正方案,并针对某具有隐身功能的无人机进行了导航控制律设计.最终的仿真结果验证了该组合导航方法以及相应制导律的可靠性和实用性.8.期刊论文李林.张河.LI Lin.ZHANG He基于GPS和红外成像的新型无人机总体设计-红外技术2006,28(4)在考虑超小型无人机特点及其对导航定位需求的基础上,介绍了一种新型无人机的总体设计思想.利用微型惯性测量单元(MIMU)、GPS接收机和红外成像系统等新技术,设计了一种低成本、轻小型的具有制引一体化的复合导航定位的攻击型无人机系统,该无人机具有自动导航定位、目标识别、精确炸点控制等功能.针对新概念武器弹药的发展要求,采用DSP、FPGA、卡尔曼滤波与软件无线电技术,解决实时性、通信等方面的难题,提高了导航能力和引战系统的性能.同时,对系统的关键技术及解决途径也进行了分析.仿真结果表明,该无人机具有较好的性能,对于发展武器弹药具有广阔的应用前景.9.期刊论文王彦杰.周树道.代义明.王敏.朱国涛.WANG Yan-Jie.ZHOU Shu-Dao.DAI Yi-Ming.WANG Min.Zhu Guo-Tao基于气象无人机GPS/DR组合导航的单步长测风方法研究-传感器世界2010,16(7)针对气象无人机GPS/DR组合导航的特点,提出了一种利用位置构成的矢量三角形关系进行风场测量的新方法,并提出了单步长风场测量,最后对测量结果进行了仿真,结果表明:采用单步长测量时风速变化频率较高,能够将风场高频信号的变化特点反映出来,测量精度较高,均方差为4m/s.可以作为气象无人机测风的一种新方法.10.期刊论文龚真春.宋执环.李平.GONG Zhen-chun.SONG Zhi-huan.Li ping超小型无人机GPS导航中的坐标转换-兵工自动化2005,24(4)超小型无人机GPS导航中,用简化高次项的高斯投影正算法将WGS-84大地坐标投影变换为高斯平面坐标,通过投影变换及在投影面上转换坐标实现坐标转换.并用相似变换法将GPS接收到的WGS-84大地经纬度高斯投影后强制转换统一,以实现坐标匹配.此算法可满足超小型无人机机载GPS导航和实时监控系统的精度要求.本文链接:/Periodical_dzjsyy200906051.aspx授权使用:上海海事大学(wflshyxy),授权号:ea4c270a-b49e-465a-8a42-9e5e00b31023下载时间:2011年1月1日。