空间后方交会与前方交会求解地面点坐标的计算方法
- 格式:doc
- 大小:67.50 KB
- 文档页数:3

摄影测量学第一章 绪论1、摄影测量是从非接触成像系统,通过记录、量测、分析与表达等处理,获取地球及其环境和其他物体的几何、属性等可靠信息的工艺、科学与技术。
2、摄影测量学的三个发展阶段:模拟摄影测量、解析摄影测量、数字摄影测量4、摄影测量存在哪些问题第二章 单幅影像解析基础1、像主点:摄影机主光轴(摄影方向)与像平面的交点,称为像片主点。
像主距:摄影机物镜后节点到像片主点的垂距称为摄影机主距,也叫像片主距(f )。
2、航空摄影:利用安装在航摄飞机上的航摄仪,在空中以预定的飞行高度度沿着事先制定好的航线飞行,按一定的时间间隔进行曝光摄影,获取整个测区的航摄像片。
空中摄影采用竖直摄影方式,即摄影瞬间摄影机物镜主光轴近似与地面垂直。
Hf L l m ==1 (m —像片比例尺分母,f —摄影机主距,H —平均高程面的摄影高度 H=m ·f ) 3、相对航高是指摄影机物镜相对于某一基准面的高度,称为摄影航高。
绝对航高是相对于平均海平面的航高,是指摄影机物镜在摄影瞬间的真实海拔高。
通过相对航高H 与摄影地区地面平均高度H 地计算得到:H 绝=H+H 地5、航向重叠:同一条航线内相邻像片之间的影像重叠称,重叠度一般要求在60%以上; 旁向重叠:两相邻航带像片之间的影像重叠,重叠度要求在30%左右。
6、中心投影:当投影会聚于一点时,称为中心投影; 正射投影:投影射线与投影平面成正交。
中心投影:投影射线会聚于一点(投影射线的会聚点称投影中心) 投影 斜投影:投影射线与投影平面成斜交 平行投影正射投影:投影射线与投影平面成正交7、透视变换中的重要的点线面:① 由投影中心作像片平面的垂线,交像面于o ,称为像主点;像主点在地面上的对应点以O 表示,称为地主点。
② 由摄影中心作铅垂线交像片平面于点n ,称为像底点;此铅垂线交地面于点N ,称为地底点。
③ 过铅垂线SnN 和摄影方向SoO 的铅垂面称为主垂面(W ),主垂面即垂直于像平面P ,又垂直于地平面E ,也垂直于两平面的交线透视轴TT 。
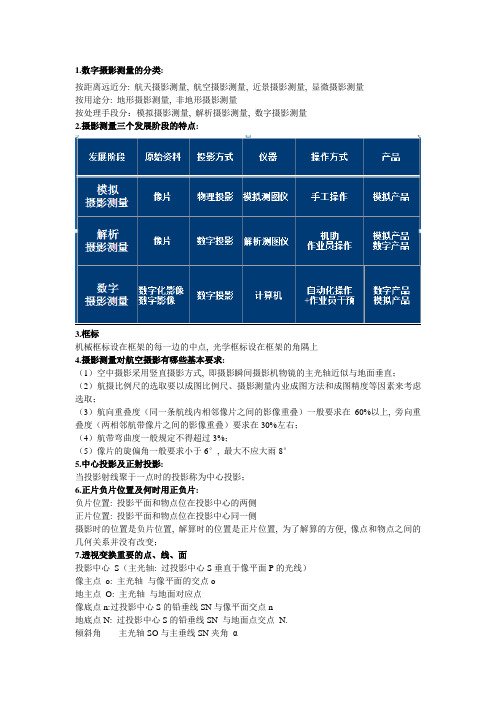
1.数字摄影测量的分类:按距离远近分: 航天摄影测量, 航空摄影测量, 近景摄影测量, 显微摄影测量按用途分: 地形摄影测量, 非地形摄影测量按处理手段分:模拟摄影测量, 解析摄影测量, 数字摄影测量2.摄影测量三个发展阶段的特点:3.框标机械框标设在框架的每一边的中点, 光学框标设在框架的角隅上4.摄影测量对航空摄影有哪些基本要求:(1)空中摄影采用竖直摄影方式, 即摄影瞬间摄影机物镜的主光轴近似与地面垂直;(2)航摄比例尺的选取要以成图比例尺、摄影测量内业成图方法和成图精度等因素来考虑选取;(3)航向重叠度(同一条航线内相邻像片之间的影像重叠)一般要求在60%以上, 旁向重叠度(两相邻航带像片之间的影像重叠)要求在30%左右;(4)航带弯曲度一般规定不得超过3%;(5)像片的旋偏角一般要求小于6°, 最大不应大雨8°5.中心投影及正射投影:当投影射线聚于一点时的投影称为中心投影;6.正片负片位置及何时用正负片:负片位置: 投影平面和物点位在投影中心的两侧正片位置: 投影平面和物点位在投影中心同一侧摄影时的位置是负片位置, 解算时的位置是正片位置, 为了解算的方便, 像点和物点之间的几何关系并没有改变;7.透视变换重要的点、线、面投影中心S(主光轴: 过投影中心S垂直于像平面P的光线)像主点o: 主光轴与像平面的交点o地主点O: 主光轴与地面对应点像底点n:过投影中心S的铅垂线SN与像平面交点n地底点N: 过投影中心S的铅垂线SN 与地面点交点N.倾斜角------主光轴SO与主垂线SN夹角α等角点c : 倾斜角α的平分线SC与像平面P的交点cSo : 摄影机的主距&像片主距用f表示;TT: 迹线&透视轴像平面和地平面的交线;SO:摄影方向, 表示摄影瞬间摄影机主光轴的空间方位;SN: 是投影中心S相对于相对于过地底点N的地平面的航高;vv: 主纵线, W和P的交线VV:摄影方向线, W和E的交线P: 像平面;E: 地平面;W:主垂面:过铅垂线SnN和摄影方向线SoO的铅垂面;P⊥W,W ⊥E, W ⊥TT8.等角点的特性:根据等角点的特性, 可以在倾斜航摄像片上以等角点c为角顶量出某一角度, 来代替在地面以点C为测站实地量测的水平角。

摄影测量与遥感概论第一章绪论1.摄影测量:是利用光学或者数码摄影机获取的影像,经过处理以获取被摄物体的形状、大小、位置、性质和相互关系的一门学科。
分类:按距离远近:(1)航天摄影测量(2)航空摄影测量(3)地面摄影测量(4)近景摄影测量(5)显微摄影测量按用途:(1)地形摄影测量(2)非地形摄影测量按处理手段:(1)模拟摄影测量(2)解析摄影测量(3)数字摄影测量用途:(1)地形测量领域:各种比例尺的地形图、专题图、特种地图、正射影像图、景观图;建立各种数据库;提供地理信息系统和土地信息系统所需要的基础数据(2)非地形测量领域:生物医学;公安侦破;古文物、古建筑;建筑物变形监测2.摄影测量发展的三个阶段:模拟摄影测量(1851-1970);解析摄影测量(1950-1980);数字摄影测量(1970-现在)3.4D产品的含义:DLG(Digital Line Graphic 数字线划地图)DRG(Digital Raster Graphic 数字栅格地图)DEM(Digital Elevation Model 数字高程模型)DOM(Digital Orthpphoto Map 数字正射影像图)5.影像信息科学:是一门记录、存储、传输、量测、处理、翻译、分析和显示由非接触传感器获得的目标及其环境信息的科学、技术、和经济实体。
第二章单张航摄像片解析1.航空摄影测量的基本要求:(1)航摄倾角(相片倾角):摄影主光轴与铅垂方向的夹角α(α<3°)(2)摄影比例尺:航摄像片上的一段线l与地面上相应线段L之比视摄影像片水平、地面取平均高程时,像片上的线段l与地面上相应水平距L之比为摄影比例尺1 m =lL=fHf为摄影机主距,H为航高(3)像片的重叠度:当相邻的两张像片拍摄景区有重叠时,重叠部分占整张像片的比例要求:航向重叠度(航线相邻两张照片的重叠度)p x>53% (60%~65%)旁向重叠度(相邻航线像片的重叠度)p y>15% (15%~30%)(4)航线弯曲:把一条航线的航摄像片根据地物影像拼接起来,各张像片的主点连线不在一条直线上而呈现为弯弯曲曲的折线,称为航线弯曲。


空间后交—前交程序设计(实验报告)姓名:班级:学号:时间:空间后交-前交程序设计一、实验目的用 C 、VB或MATLAB语言编写空间后方交会-空间前方交会程序⑴提交实习报告:程序框图、程序源代码、计算结果、体会⑵计算结果:像点坐标、地面坐标、单位权中误差、外方位元素及其精度二、实验数据f=150。
000mm,x0=0,y0=0三、实验思路1。
利用空间后方交会求左右像片的外方位元素(1).获取m(于像片中选取两点,于地面摄影测量坐标系中选取同点,分别计算距离,距离比值即为m),x,y,f,X,Y,Z(2).确定未知数初始值Xs,Ys,Zs,q,w,k(3).计算旋转矩阵R(4).逐点计算像点坐标的近似值(x),(y)(5)。
组成误差方程式(6)。
组成法方程式(7).解求外方位元素(8)。
检查是否收敛,即将求得的外方位元素的改正数与规定限差比较,小于限差即终止;否则用新的近似值重复步骤(3)-(7)2。
利用求出的外方位元素进行空间前交,求出待定点地面坐标(1).用各自像片的角元素计算出左、右像片的方向余弦值,组成旋转矩阵R1,R2(2)。
根据左、右像片的外方位元素,计算摄影基线分量Bx,By,Bz(3)。
计算像点的像空间辅助坐标(X1,Y1,Z1)和(X2,Y2,Z2)(4).计算点投影系数N1和N2(5)。
计算未知点的地面摄影测量坐标四、实验过程⑴程序框图函数AandL%求间接平差时需要的系数%%%已知%a=像点坐标x,b=像点坐标y,f内方位元素主距%φ=q,ψ=w,κ=k%像空间坐标系X,Y,Z%地面摄影测量坐标系Xs,Ys,Zsfunction [A1,L1,A2,L2]=AandL(a,b,f,q,w,k,X,Y,Z,Xs,Ys,Zs) %%%%%%%%%%%选择矩阵元素a1=cos(q)*cos(k)—sin(q)*sin(w)*sin(k);a2=-cos(q)*sin(k)—sin(q)*sin(w)*cos(k);a3=-sin(q)*cos(w);b1=cos(w)*sin(k);b2=cos(w)*cos(k);b3=—sin(w);c1=sin(q)*cos(k)+cos(q)*sin(w)*sin(k);c2=—sin(q)*sin(k)+cos(q)*sin(w)*cos(k);c3=cos(q)*cos(w);%%%%%%%共线方程的分子分母X_=a1*(X—Xs)+b1*(Y-Ys)+c1*(Z-Zs);Y_=a2*(X-Xs)+b2*(Y—Ys)+c2*(Z-Zs);Z_=a3*(X—Xs)+b3*(Y—Ys)+c3*(Z-Zs);%%%%%%%近似值x=-f*X_/Z_;y=-f*Y_/Z_;%%%%%%%A组成L组成a11=1/Z_*(a1*f+a3*x);a12=1/Z_*(b1*f+b3*x);a13=1/Z_*(c1*f+c3*x);a21=1/Z_*(a2*f+a3*y);a22=1/Z_*(b2*f+b3*y);a23=1/Z_*(c2*f+c3*y);a14=y*sin(w)-(x/f*(x*cos(k)—y*sin(k))+f*cos(k))*cos(w);a15=-f*sin(k)—x/f*(x*sin(k)+y*cos(k));a16=y;a24=—x*sin(w)-(y/f*(x*cos(k)-y*sin(k))—f*sin(k))*cos(w);a25=-f*cos(k)-y/f*(x*sin(k)+y*cos(k));a26=-x;lx=a—x;ly=b-y;%%%%%%%%%组成一个矩阵,并返回A1=[a11,a12,a13,a14,a15,a16];A2=[a21,a22,a23,a24,a25,a26];L1=lx;L2=ly;函数deg2dms%%%%%%%%角度转度分秒function y=deg2dms(x)a=floor(x);b=floor((x-a)*60);c=(x-a—b/60)*3600;y=a+(b/100)+(c/10000);函数dms2deg%%%%%度分秒转度function y=dms2deg(x)a=floor(x);b=floor((x-a)*100);c=(x-a—b/100)*10000;y=a+b/60+c/3600;函数ok%%%%%%%%%%%%%%目的是为了保证各取的值的有效值%%xy为n*1,a为1*nfunction result=ok(xy,a)format short gi=size(xy,1);for n=1:io=xy(n)—floor(xy(n,1));o=round(o*(10^a(n)))/(10^a(n));xy(n,1)=floor(xy(n,1))+o;endformat long gresult=xy;函数rad2dmsxy%%%%求度分秒表现形式的三个外方位元素,三个角度function xydms=rad2dmsxy(xy)[a,b,c,d,e,f]=testvar(xy);d=deg2dms(rad2deg(d));e=deg2dms(rad2deg(e));f=deg2dms(rad2deg(f));xydms=[a,b,c,d,e,f]';函数spacehoujiao%%%%%%%空间后交%%% f%%输入p(2*n,1)%%像点坐标x,y,X,Y,Z,均为(n,1)function [xy,m,R]=spacehoujiao(p,x,y,f,X,Y,Z)format long;%%%%%权的矢量化,这是等精度时的,如果非,将函数参数改为PP=diag(p);%%求nj=size(X,2);%%初始化Xs=0;Ys=0;Zs=0;for n=1:jXs=Xs+X(n);Ys=Ys+Y(n);Zs=Zs+Z(n);endSx=sqrt((x(2)-x(1))^2+(y(2)—y(1))^2);%%%%两像点之间距离Sd=sqrt((X(2)-X(1))^2+(Y(2)-Y(1))^2);%%%%两地面控制点之间距离m=Sd/Sx; %%%%图像比例系数Xs=Xs/j;Ys=Ys/j;Zs=m*f+Zs/j;m0=0;q=0;w=0;k=0;i=0;a=rand(2*j,6);l=rand(2*j,1);%%%%for n=1:j[a(2*n—1,:),l(2*n—1,1),a(2*n,:),l(2*n,1)]=AandL(x(n),y(n),f,q,w,k,X(n),Y(n),Z(n),Xs,Ys,Zs);enddet=inv(a’*P*a)*transpose(a)*P*l;%%%%%%%%%循环体while 1%%%%%%%%%%%%%%%%[dXs,dYs,dZs,dq,dw,dk]=testvar(det);detXs=abs(dXs);detYs=abs(dYs);detZs=abs(dZs);detq=abs(dq);detw=abs(dw);detk=abs(dk);%%%%%%%%%if ((detXs<0。

《摄影测量与遥感》习题集一、名词解释摄影测量与遥感、像平面坐标系、相机主距、单片空间后方交会、主合点、GPS辅助空中三角测量、量测相机、非量测相机、航高、DEM、摄影比例尺、航向重叠度、旁向重叠度、数字微分纠正、摄影基线、内方位元素、外方位元素、采样、重采样、像点位移、解析空中三角测量、绝对定向、相对定向、空间分辨率、时间分辨率、光谱分辨率、温度分辨率、大气窗口、正解法数字微分纠正、反解法数字微分纠正二、填空题1.摄影测量与遥感要解决的是所获信息的“2W"问题,即___________和___________这两大问题.2。
摄影测量的发展经历了_______、_______和_______三个阶段.3.同一条航线内相邻像片之间的影像重叠称为_______,一般在_____以上。
相邻航线的重叠称为_______,重叠度要求在_____以上。
4.摄影中心且垂直于像平面的直线叫做 _________,它与像平面的交点称为______。
5.全数字摄影测量一般分为_______和________两种方式。
6.航空摄影像片为地面景物的_________投影。
7.摄影测量中常用的坐标系有_______、_______、_______、_______、_______。
8.像点a、摄影中心S和物点A在同一条直线上,这三点之间的数学关系式称为。
9.利用航摄像片上三个以上像点坐标和相应的地面点坐标,计算像片的外方位元素的工作,称为。
10.相对定向的目的是,最少需要对点。
11.解求单张像片的外方位元素最少需要个点。
12.采用连续法对像对进行相对定位时,通常采用_______________________作为描述两张像片相对位置的像空间辅助坐标系。
13.单元模型的绝对定向最少需要_______个平高点和_______个高程地面控制点。
14.两个空间直角坐标系间的坐标变换最少需要______个_______和___ 个_______地面控制点。
一、名词解释1摄影测量学 2航向重叠3单像空间后方交会 4相对航高5解析空中三角测量 6外方位元素7核面 8绝对定向元素二、问答题1.写出中心投影的共线方程式并说明式中各参数的含义。
2.指出采用“后方交会+前方交会”和“相对定向+绝对定向”两种方法计算地面点坐标的基本步骤。
3.简述利用光束法(一步定向法)求解物点坐标的基本思想。
4.简述解析绝对定向的基本过程。
5.简述相对定向的基本过程。
6.试述航带网法解析空中三角测量的基本步骤。
二、填空1摄影测量的基本问题,就是将_________转换为__________。
2人眼产生天然立体视觉的原因是由于_________的存在。
3相对定向完成的标志是__________。
三、简答题1两种常用的相对定向元素系统的特点及相对定向元素。
2倾斜位移的特性。
3单航带法相对定向后,为何要进行比例尺归化?怎样进行?4独立模型法区域网平差基本思想。
5何谓正形变换?有何特点?四、论述题1空间后方交会的计算步骤。
2有三条航线,每条航线六张像片组成一个区域,采用光束法区域网平差。
(1)写出整体平差的误差方程式的一般式。
(2)将像片进行合理编号,并计算带宽,内存容量。
(3)请画出改化法方程系数阵结构简图。
参考答案:一、1是对研究的对象进行摄影,根据所获得的构想信息,从几何方面和物理方面加以分析研究,从而对所摄影的对象本质提供各种资料的一门学科。
2供测图用的航测相片沿飞行方向上相邻像片的重叠。
3知道像片的内方位元素,以及三个地面点坐标和量测出的相应像点的坐标,就可以根据共线方程求出六个外方位元素的方法。
4摄影瞬间航摄飞机相对于某一索取基准面的高度。
5将中心投影转换成正射投影时,经过投影变换来消除相片倾斜所引起的像点位移,使它相当于水平相片的构象,并符合所规定的比例尺的变换过程。
6是将建立的投影光束,单元模型或航带模型以及区域模型的数字模型,根据少数地面控制点,按最小二乘法原理进行平差计算,并求加密点地面坐标的方法。
双像解析计算的空间后交-前交方法
当我们通过航空摄影,获得地面的一个立体像对时,采用双像解析计算的空间后交-前交方法计算地面点的空间点位。
这种方法首先由单片后方交会求出左、右像片的外方位元素,再用空间前方交会公式求出待定点坐标,其具体的作业步骤如下:
● 像片野外控制测量
一个立体像对采用空间后方交会-前方交会法计算点的地面坐标时,像对内必须具有一定数量的地面控制点坐标。
一般情况下,在一个像对的重叠范围四个角上,找出四个明显地物点,在野外判识出地面的实际位置,并准确地在像片上刺出各点的位置,要求在像片的背面绘出各点与周围地物关系的点位略图,加注记说明。
然后用普通测量计算方法,求出四个控制点的地面坐标X,Y,Z 。
● 用立体坐标量测仪测像点的坐标
像片在仪器上归心定向后,测出四个控制点的像片坐标()11y ,x 与()22y ,x ,然后测出所需要解求的地面点坐标()11y ,x 和()22y ,x 。
● 空间后方交会法计算像片外方位元素
利用控制点分别计算每个像片的六个外方位元素,包括:S1X ,S1Y ,S1Z ,1ϕ,1ω,1κ和S2X ,S2Y ,S2Z ,2ϕ,2ω,2κ。
● 空间前方交会计算所求点的地面坐标
1. 用各自像片的角元素,计算出左、右像片的旋转
矩阵1R 与2R 。
2. 根据左、右像片的外方位线元素计算摄影基线分
量X B ,Y B ,Z B :
⎪⎭⎪
⎬
⎫
-=-=-=S1S2Z S1S2Y S1S2X Z Z B Y Y B X X B
3. 逐点计算像点的像空间辅助坐标
:
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥
⎦⎤⎢⎢⎢⎣⎡f y x R Z Y X 111
111,⎥⎥
⎥
⎦⎤
⎢⎢⎢⎣⎡-=⎥⎥
⎥⎦⎤⎢⎢⎢⎣⎡f y x R Z Y X 111111
4. 计算点投影系数:
⎪⎪⎭⎪
⎪⎬
⎫
--=--=12211121221221Z X Z X X B Z B N Z X Z X X B Z B N Z X Z X
5. 计算所求点的地面摄影测量坐标:
⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡222222111222222222111111111Z N Y N X N B B B Z Y X Z N Y N X N Z Y X Z N Y N X N Z Y X Z Y X Z Y X S S S S S S S S S A A A 6. 重复3-5步骤完成所有点地面坐标的计算。