空间后方交会基本原理
- 格式:ppt
- 大小:2.75 MB
- 文档页数:27
空间后方交会的解算一. 空间后方交会的目的摄影测量主要利用摄影的方法获取地面的信息,主要是是点位信息,属性信息,因此要对此进行空间定位和建模,并首先确定模型的参数,这就是空间后方交会的目的,用以求出模型外方位元素。
二. 空间后方交会的原理空间后方交会的原理是共线方程。
共线方程是依据相似三角形原理给出的,其形式如下111333222333()()()()()()()()()()()()A S A S A S A S A S A S AS A S A S A S A S A S a X X b Y Y c Z Z x f a X X a Y Y a Z Z a X X b Y Y c Z Z y f a X X a Y Y a Z Z -+-+-=--+-+--+-+-=--+-+-上式成为中心投影的构线方程,我们可以根据几个已知点,来计算方程的参数,一般需要六个方程,或者要三个点,为提高精度,可存在多余观测,然后利用最小二乘求其最小二乘解。
将公式利用泰勒公式线性化,取至一次项,得到其系数矩阵A ;引入改正数(残差)V ,则可将其写成矩阵形式:V AX L =-其中111333222333[,]()()()()()()()()()()()()()()Tx y A S A S A S x A S A S A S A S A S A S y A S A S A S L l l a X X b Y Y c Z Z l x x x fa X X a Y Y a Z Z a X Xb Y Yc Z Z l y y y fa X X a Y Y a Z Z =-+-+-=-=+-+-+--+-+-=-=+-+-+- 则1()T T X A A A L -=X 为外方位元素的近似改正数,由于采用泰勒展开取至一次项,为减少误差,要将的出的值作为近似值进行迭代,知道小于规定的误差三. 空间后方交会解算过程1. 已知条件近似垂直摄影00253.24mmx y 0f ===2. 解算程序流程图MATLAB 程序format long;s1=xlsread('data.xls');%读取数据a1=s1(1:4,1:2);%影像坐标b1=s1(1:4,3:5);%地面摄影测量坐标a2=s1.*10^-3;%影像坐标单位转化j1=a2(1,:)-a2(2,:);j2=j1(1,1)^2+j1(1,2)^2;lengh_a1=sqrt(j2); %相片某一长度j1=b1(1,:)-b1(1,:);j2=j1(1,1)^2+j1(1,2)^2;lengh_b1=sqrt(j2); %地面对应的长度m=lengh_b1/lengh_a1;%求出比例尺n0=0;p0=0;q0=0;x0=mean(b1(:,1));y0=mean(b1(:,2));f=153.24*10^-3;z0=m*f;x001={x0,x0,x0,x0};X0=cell2mat(x001)';y001={y0,y0,y0,y0};Y0=cell2mat(y001)';z001={z0,z0,z0,z0};Z0=cell2mat(z001)';%初始化外方位元素的值aa1=cos(n0)*cos(q0)-sin(n0)*sin(p0)*sin(q0);aa2=-sin(q0)*cos(n0)-sin(n0)*sin(p0)*cos(q0);aa3=-sin(n0)*cos(p0);bb1=sin(q0)*cos(p0);bb2=cos(q0)*cos(p0);bb3=-sin(p0);cc1=sin(n0)*cos(q0)+sin(p0)*cos(n0)*sin(q0);cc2=-sin(n0)*sin(q0)+sin(p0)*cos(q0)*cos(n0);cc3=cos(n0)*cos(p0);%计算改正数XX1=aa1.*(b1(:,1)-X0)+bb1.*(b1(:,2)-Y0)+cc1.*(b1(:,3)-Z0); XX2=aa2.*(b1(:,1)-X0)+bb2.*(b1(:,2)-Y0)+cc2.*(b1(:,3)-Z0); XX3=aa3.*(b1(:,1)-X0)+bb3.*(b1(:,2)-Y0)+cc3.*(b1(:,3)-Z0); lx=a1(:,1)+f.*(XX1./XX3);ly=a1(:,2)+f.*(XX2./XX3);l={lx',ly'};L=cell2mat(l)';%方程系数A=[-3.969*10^-5 0 2.231*10^-5 -0.2 -0.04 -0.06899;0 -3.969*10^-5 1.787*10^-5 -0.04 -0.18 0.08615;-2.88*10^-5 0 1*10^-5 -0.17 0.03 0.08211;0 -2.88*10^-5 -1.54*10^-5 0.03 -0.2 0.0534;-4.14*10^-5 0 4*10^-6 -0.15 -7.4*10^-3 -0.07663;0 -4.14*10^-5 2.07*10^-5 -7.4*10^-3 -0.19 0.01478;-2.89*10^-5 0 -1.98*10^-6 -0.15 -4.4*10^-3 0.06443;0 -2.89*10^-5 -1.22*10^-5 -4.4*10^-3 -0.18 0.01046];%L=[-1.28 3.78 -3.02 -1.45 -4.25 4.98 -4.72 -0.385]'.*10^-2; %第一次迭代X=inv(A'*A)*A'*L;3.结果X=1492.41127406195-554.4015671761941425.68660973544-0.0383847815608609 0.00911624039769785 -0.105416434087641S=1492.41127406195-554.401567176194 1425.68660973544 38436.9616152184 27963.1641162404-0.105416434087641。
后方交会残差值误差范围后方交会是摄影测量中常用的一种方法,用于确定地面上各个点的空间坐标。
在实际应用中,由于各种误差的存在,后方交会的结果会产生一定的残差值误差。
误差范围的确定对于保证测量结果的准确性和可靠性非常重要。
本文将从后方交会的基本原理、误差来源、误差计算方法以及误差范围的确定等方面进行详细的分析和论述。
一、后方交会的基本原理后方交会是一种基于像对几何关系的摄影测量方法,通过对各个像点的位置测量和相对方位角的观测,计算出地面控制点的空间坐标。
其基本原理可以简述如下:1. 反投影原理:根据像点在像空间上的位置,利用摄影测量的几何关系反推出这些像点所对应的地面点在物空间上的位置。
反投影原理是后方交会的理论基础,也是误差产生的根源。
2. 控制点观测:确定一定数量的控制点,并测量其像点位置及相对方位角。
控制点的选择应满足精度要求和实际情况,通常采用地面测量或其他摄影测量方法进行。
3. 几何模型:根据反投影原理和控制点观测,建立几何模型,描述像空间与物空间之间的几何关系。
模型包括相机的内外参数、像点的位置和相对方位角等。
4. 误差方程:利用几何模型,建立误差方程,将测量值与真实值之间的误差表示出来。
误差方程是分析误差来源、计算误差范围的基础。
二、后方交会误差的来源后方交会的误差主要来自于以下几个方面:1. 相机内外参数的误差:相机的内外参数是后方交会的重要参数,包括焦距、主点位置、旋转矩阵、平移向量等。
由于摄影测量设备和仪器的制造和使用限制,这些参数会存在误差,从而影响后方交会的结果。
2. 观测误差:观测误差包括控制点的像点测量误差和方位角观测误差。
像点测量误差可以由像点测量精度来描述,方位角观测误差可以由方位角观测精度来描述。
观测误差是由测量设备、操作人员和环境等因素共同引起的。
3. 地面控制点的精度:后方交会的精度还受到地面控制点的精度限制。
如果地面控制点的精度较差,那么后方交会的精度也会受到影响。
单像空间后方交会原理非常简单,稍稍懂一点线性代数和微分学知识就很容易理解。
但它的意义很大,所有的基于视觉技术的定位(测量)都是从它扩展来的,没有它就没有后面的复杂算法的演进,以面向更复杂的场景以及需求。
这块内容一般来说就是在已知地面上若干点的地面坐标以后,反求该相应摄影光束的外参数,当用以作摄影机的标定时,还可借以同时求出摄影的内参数。
具体的说就是一个多元线性模型,根据不同的需求可以基于它进一步构建各种平差模型。
空间后方交会的直接解空间后方交会,即由物方已知若干个控制点以及相应的像点坐标,解求摄站的坐标与影像的方位,这是一个摄影测量的基本问题。
通常采用最小二乘解算,由于原始的观测值方程是非线性的,因此,一般空间后方交会必须已知方位元素的初值,且解算过程是个迭代解算过程。
但是,在实时摄影测量的某些情况下,影像相对于物方坐标系的方位是任意的,且没有任何初值可供参考。
这时常规的空间后方交会最小二乘算法就无法处理,而必须建立新的空间后方交会的直接解法。
直接解法的基本思想是将它分成两步:先求出三个已知点i P 到摄站S 的距离i S ;然后求出摄站S 的坐标和影像方位。
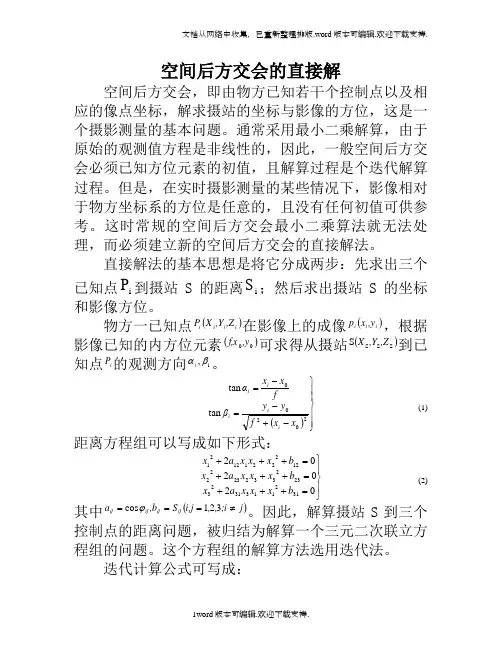
物方一已知点()iiii,Z ,Y X P 在影像上的成像()iii,y x p ,根据影像已知的内方位元素()0,y f,x 可求得从摄站()SS S S ,Z ,Y X 到已知点i P 的观测方向i,βαi 。
()⎪⎪⎭⎪⎪⎬⎫-+-=-=2020tan tan x x f y y βf x x αi i i i i (1)距离方程组可以写成如下形式:⎪⎭⎪⎬⎫=+++=+++=+++020202312113312323233223221222211221b x x x a x b x x x a x b x x x a x (2)其中()j ;i ,,i,j S ,b a ijijijij≠===321cos ϕ。
因此,解算摄站S 到三个控制点的距离问题,被归结为解算一个三元二次联立方程组的问题。
这个方程组的解算方法选用迭代法。
迭代计算公式可写成:()()() ,,,K Ab Aa x K K 2101=+=+(3)其中,[]TS F S F S F a 231312232321212=()()()()()()()()()()[]T2K 1K 3312K 3K 2232K 2K 112K S S G S S G S S G b------=()()()()[]TK K K K S S S x 232221=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=111111111---A⎪⎪⎭⎫ ⎝⎛=2sin 2122ij ij F ϕij ij ij F G ϕcos 22=因此,距离的初值,即当0=K 时,Aa x =0()()20i0iS S =()()()()()()()()()()[]T2010331203022320201120S S G S S G S S G b------=代入(2-24)式进行迭代。
空间后方—前方交会的原理
空间后方交会和前方交会都是航天技术中的重要概念。
空间后方交会是通过地面控制点和像片上的像点来确定单幅影像的外方位元素的方法。
这种方法以单张像片为基础,求解每张像片的外方位元素,确定被摄物体与航摄像片的几何关系。
后方交会需要地面控制点,依靠单张像片就可求出其外方位元素。
而前方交会则是利用立体像对的同名像点求解地面点坐标的过程。
它利用同名像点坐标和像对的相对方位元素解算模型点坐标。
这种方法在确定了被摄物体与航摄像片的几何关系后,利用立体像对同名像点对对相交的原理确定物方空间坐标。
如需了解更多关于空间后方—前方交会原理的信息,建议查阅航天领域相关书籍或咨询专业人士。

空间后方—前方交会的原理
以空间后方—前方交会的原理为题,我来为大家描述一下。
空间后方—前方交会是一种用于确定目标位置的方法,常用于航空、导航、测绘等领域。
它利用人眼的立体视觉和视差效应,通过观察目标在不同视角下的位置变化,来推断目标的实际位置。
这种方法可以较精确地确定目标的距离和方位,尤其适用于远距离观测。
在进行空间后方—前方交会时,我们首先需要选择两个观测点,它们之间的距离应足够远,以便产生明显的视差效应。
然后,我们分别在这两个观测点上观察目标,并记录下目标在两个观测点的位置。
接下来,我们需要测量观测点之间的距离,并确定观测点与目标之间的夹角。
这些数据将用于计算目标的实际位置。
通过对两个观测点的位置和距离进行几何分析,我们可以得到目标相对于观测点的位移向量。
然后,我们再将这个位移向量与观测点之间的夹角结合起来,就可以计算出目标相对于观测点的实际位置。
空间后方—前方交会的原理基于视差效应,即当我们观察远处的目标时,由于两只眼睛的视角不同,目标在两只眼睛中的位置也会有所不同。
通过比较这两个位置的差异,我们就可以推断出目标的实际位置。
总的来说,空间后方—前方交会是一种利用视差效应来确定目标位
置的方法。
它可以在远距离观测中提供较为准确的测量结果,具有广泛的应用前景。
空间后方—前方交会的原理空间后方—前方交会是一种导航技术,通过测量目标物体在不同观测点的角度,并利用三角测量原理计算目标物体的位置。
这种技术广泛应用于航空、航天、导航等领域,可以帮助人们准确地确定目标物体的位置和方向。
在空间后方—前方交会中,观测者需要站在不同的位置观测目标物体,并测量目标物体相对于观测点的角度。
观测者需要使用测角仪或其他测量工具来测量角度,并记录下相应的数据。
测量完所有观测点的角度后,观测者需要根据这些角度数据进行三角计算,以确定目标物体的位置。
三角计算是利用三角函数来计算角度和边长的关系,通过已知的角度和边长来计算未知的角度和边长。
观测者需要根据测量得到的角度数据和观测点之间的距离,使用三角函数计算目标物体的位置坐标。
空间后方—前方交会的原理简单明了,但在实际应用中需要考虑一些因素。
首先,观测者需要选择合适的观测点,观测点的位置应尽量避免遮挡物,以确保观测到目标物体的角度准确无误。
其次,观测者需要准确测量角度,并尽量避免误差的产生。
最后,观测者需要进行精确的三角计算,以确保计算出的目标物体位置准确无误。
空间后方—前方交会技术的应用非常广泛。
在航空领域,飞行员可以利用该技术确定飞机的位置和方向,以确保飞行安全。
在航天领域,航天员也可以利用该技术确定航天器的位置和方向,以实现精确的轨道控制。
此外,该技术还可以应用于导航系统中,帮助人们准确导航和定位。
空间后方—前方交会是一种通过测量目标物体在不同观测点的角度,并利用三角计算原理确定目标物体位置的导航技术。
该技术在航空、航天、导航等领域有着广泛的应用,可以帮助人们准确地确定目标物体的位置和方向。
通过合理的观测点选择、准确的角度测量和精确的三角计算,空间后方—前方交会技术可以为人们提供准确可靠的导航和定位服务。
单像空间后方交会原理你知道单像空间后方交会吗?这可是摄影测量里一个超有趣的概念呢!咱们先来说说啥是单像空间后方交会。
想象一下,你拿着相机拍了一张照片,这张照片里有好多好多的景物。
那单像空间后方交会呢,就是通过这一张照片里的信息,去算出拍摄这张照片的时候,相机在空间里的位置和姿态。
比如说,照片里有一座山,还有一条河,还有几棵大树。
那咱们怎么通过这些东西来知道相机当时在哪,朝哪个方向呢?这就用到单像空间后方交会啦!这当中有几个关键的东西哦。
一个是控制点,就好像是我们的“小帮手”。
这些控制点是我们事先知道它们在空间里准确位置的点。
比如说,有个特别明显的大石头,我们知道它在地球上的坐标是多少。
然后呢,还有像片的内方位元素。
这就像是相机的“小秘密”,比如说相机的焦距啦等等。
那怎么通过这些来算出相机的位置和姿态呢?这就像是一个解谜的过程!咱们得先把照片上控制点的像点坐标找出来,这就像是在照片里给这些控制点“定位”。
然后呢,根据一些数学公式和算法,把这些坐标啊、内方位元素啊、控制点的空间坐标啊等等都放到一起,就像是把一堆拼图的碎片拼起来。
这个过程可不容易哦,得算好多好多的数学式子。
但是别担心,咱们聪明的科学家们早就想出了办法,有各种软件和工具能帮咱们完成这些复杂的计算。
你可能会想,这有啥用啊?用处可大啦!比如说,我们要做地图,要对一个地方进行测量,单像空间后方交会就能帮我们得到相机的位置和姿态,这样就能更准确地知道照片里的东西在实际空间里的位置啦。
而且哦,现在科技越来越发达,单像空间后方交会的精度也越来越高。
这就像是我们的眼睛越来越厉害,能看得更清楚,更准确!想象一下,如果没有单像空间后方交会,那我们看到的照片就只是一张好看的图片,没办法知道那么多背后的信息。
但是有了它,一张照片就像是一个装满了秘密的宝盒,我们可以一点点地解开,发现更多有趣的东西。
怎么样,是不是觉得单像空间后方交会很神奇很有趣呀?希望我讲得能让你明白这个有点复杂但又超级酷的原理!。
单像空间后方交会测绘学院 成晓倩1 概述1.1 定义利用一定数量的地面控制点和对应像点坐标求解单张像片外方位元素的方法称为空间后方交会。
1.2 所需控制点个数与分布共线条件方程的一般形式为:⎪⎪⎩⎪⎪⎨⎧-+-+--+-+--=--+-+--+-+--=-)()()()()()()()()()()()(33322203331110S S S S S S S S S S S S Z Z c Y Y b X X a Z Z c Y Y b X X a f y y Z Z c Y Y b X X a Z Z c Y Y b X X a f x x (1)式中包含有六个外方位元素,即κωϕ、、、、、S S S Z Y X ,只有确定了这六个外方位元素的值,才能利用共线条件方程真正确定一张像片的任一像点与对应地面点的坐标关系。
个数:对任一控制点,我们已知其地面坐标)(i i i Z Y X 、、和对应像点坐标)(i i y x 、,代入共线条件方程可以列出两个方程式,因此,只少需要3个控制点才能解算出六个外方位元素。
在实际应用中,为了避免粗差,应有多余检查点,因此,一般需要4~6个控制点。
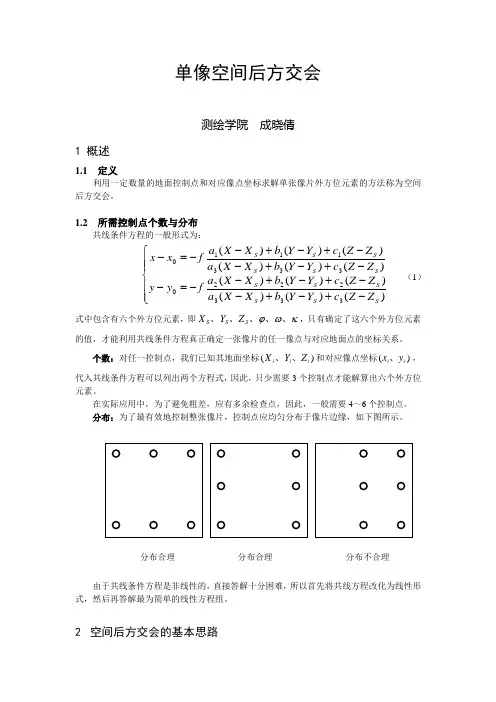
分布:为了最有效地控制整张像片,控制点应均匀分布于像片边缘,如下图所示。
由于共线条件方程是非线性的,直接答解十分困难,所以首先将共线方程改化为线性形式,然后再答解最为简单的线性方程组。
2 空间后方交会的基本思路分布合理 分布合理 分布不合理2.1 共线条件方程线性化的基本思路在共线条件方程中,令)()()()()()()()()(333222111S S S S S S S S S Z Z c Y Y b X X a Z Z Z c Y Y b X X a Y Z Z c Y Y b X X a X -+-+-=-+-+-=-+-+-= (2) 则共线方程变为⎪⎪⎩⎪⎪⎨⎧-=--=-ZY fy y Z Xf x x 00 (3) 对上式两侧同乘Z ,并移至方程同侧,则有⎩⎨⎧=-+=-+0)(0)(00Z y y Y f Z x x X f (4) 令⎩⎨⎧-+=-+=Zy y Y f Fy Zx x X f Fx )()(00 (5) 由于上式是共线方程的变形,因此,Fy Fx 、是κωϕ、、、、、S S S Z Y X 的函数。
摄影测量学空间后方交会实验报告测绘101徐斌摄影测量学实验报告实验一、单像空间后方交会学院: 建测学院班级: 测绘101姓名: 徐斌学号: 26一( 实验目的1.深入了解单像空间后方交会的计算过程;2.加强空间后方交会基本公式和误差方程式,法线方程式的记忆;3.通过上机调试程序加强动手能力的培养。
二(实验原理以单幅影像为基础,从该影像所覆盖地面范围内若干控制点和相应点的像坐标量测值出发,根据共线条件方程,求解该影像在航空摄影时刻的相片外方位元素。
三(实验内容1.程序图框图2.实验数据(1)已知航摄仪内方位元素f,153.24mm,Xo,Yo,0。
限差0.1秒(2)已知4对点的影像坐标和地面坐标:影像坐标地面坐标x(mm) y(mm) X(m) Y(m) Z(m) 1 -86.15 -68.99 36589.41 25273.32 2195.17 2 -53.40 82.21 37631.08 31324.51 728.69 3 -14.78 -76.63 39100.97 24934.98 2386.50 4 10.46 64.43 40426.54 30319.81 757.313.实验程序Form1.cs 程序using System;using System.Collections.Generic; using ponentModel;using System.Data;using System.Drawing;using System.Linq;using System.Text;using System.Windows.Forms;using System.IO;namespace 后方交会1{public partial class Form1 : Form {public Form1(){InitializeComponent();}public doublef,m,Xs, Ys, Zs,a1, a2, a3, b1, b2, b3, c1, c2, c3, q, w, k;public static int N,s;public double[] x = new double[4];public double[] y = new double[4];public double[] X = new double[4];public double[] Y = new double[4];public double[] Z = new double[4];public double[,] L = new double[N*2, 1];string output="外方位元素\t\n";Matrix XX;string[] a =File.ReadAllLines("d:\\控制点.txt");public void 计算N(){int cnt;using (StreamReader sr = new StreamReader(@"d:\控制点.txt")) {cnt = 0;while (sr.ReadLine() != null){cnt++;}// 这个cnt就是行数}N = cnt/5;}public void 计算初始值(){double temp=0;for (int i = 0; i <N; i++){temp+=X[i];}Xs =temp/ N;double tmp = 0;for (int i = 0; i < N; i++){tmp += Y[i];}Ys =tmp/ N;Zs = m*f;}public void 求改正数(){a1 = Math.Cos(q) * Math.Cos(k) - Math.Sin(q) * Math.Sin(w) * Math.Sin(k);a2 = -Math.Cos(q) * Math.Sin(k) - Math.Sin(q) * Math.Sin(w) * Math.Cos(k);a3 = -Math.Sin(q) * Math.Cos(w);b1 = Math.Cos(w) * Math.Sin(k);b2 = Math.Cos(w) * Math.Cos(k);b3 = -Math.Sin(w);c1 = Math.Sin(q) * Math.Cos(k) + Math.Cos(q) * Math.Sin(w) * Math.Sin(k);c2 = -Math.Sin(q) * Math.Sin(k) + Math.Cos(q) * Math.Sin(w) * Math.Cos(k);c3 = Math.Cos(q) * Math.Cos(w);int p = 0;int j = p;for (p = 0; p < a.Length; p += 5){x[j] = double.Parse(a[p])/1000;y[j] = double.Parse(a[p + 1])/1000;X[j] = double.Parse(a[p + 2]);Y[j] = double.Parse(a[p + 3]);Z[j] = double.Parse(a[p+ 4]);j++;}Matrix A = new Matrix(N*2, 6);int i = 0;int b = i;for (i = 0; i < N; i++){A.m_data[b, 0] = (a1 * f + a3 * x[i]) / (a3 * (X[i] - Xs) + b3 * (Y[i] - Ys) + c3 * (Z[i] - Zs));A.m_data[b, 1] = (b1 * f + b3 * x[i]) / (a3 * (X[i] - Xs) + b3 *(Y[i] - Ys) + c3 * (Z[i] - Zs));A.m_data[b, 2] = (c1 * f + c3 * x[i]) / (a3 * (X[i] - Xs) + b3 *(Y[i] - Ys) + c3 * (Z[i] - Zs));A.m_data[b, 3] = y[i] * Math.Sin(w) - (x[i] / f * (x[i] * Math.Cos(k) - y[i] * Math.Sin(k)) + f * Math.Cos(k)) * Math.Cos(w);A.m_data[b, 4] = -f * Math.Sin(k) - x[i] / f * (x[i] * Math.Sin(k) + y[i] * Math.Cos(k));A.m_data[b, 5] = y[i];A.m_data[b + 1, 0] = (a2 * f + a3 * y[i]) / (a3 * (X[i] - Xs) + b3 * (Y[i] - Ys) + c3 * (Z[i] - Zs));A.m_data[b + 1, 1] = (b2 * f + b3 * y[i]) / (a3 * (X[i] - Xs) + b3 * (Y[i] - Ys) + c3 * (Z[i] - Zs));A.m_data[b + 1, 2] = (c2 * f + c3 * y[i]) / (a3 * (X[i] - Xs) + b3 * (Y[i] - Ys) + c3 * (Z[i] - Zs));A.m_data[b + 1, 3] = -x[i] * Math.Sin(w) - (y[i] / f * (x[i] *Math.Cos(k) - y[i] * Math.Sin(k)) - f * Math.Sin(k)) * Math.Cos(w);A.m_data[b + 1, 4] = -f * Math.Cos(k) - y[i] / f * (x[i] *Math.Sin(k) + y[i] * Math.Cos(k));A.m_data[b + 1, 5] = -x[i];b += 2;}Matrix T = new Matrix(6, N*2);T = A.Transpose();Matrix AT = T * A;Matrix AA = AT.Inverse();Matrix P = AA * T;Matrix L = new Matrix(N*2, 1);int v = 0;int m = v;for (v = 0; v < N; v++){L.m_data[m, 0] = x[v] + f * (a1 * (X[v] - Xs) + b1 * (Y[v] - Ys) + c1 * (Z[v]- Zs)) / (a3 * (X[v] - Xs) + b3 * (Y[v] - Ys) + c3 * (Z[v] - Zs));L.m_data[m + 1, 0] = y[v] + f * (a2 * (X[v] - Xs) + b2 * (Y[v] - Ys) + c2 * (Z[v]- Zs)) / (a3 * (X[v] - Xs) + b3 * (Y[v] - Ys) + c3 * (Z[v] - Zs));m += 2;}XX = P * L;//计算外方位元素Xs += XX[0, 0];Ys += XX[1, 0];Zs += XX[2, 0];q += XX[3, 0];w += XX[4, 0];k += XX[5, 0];}public void 迭代(){求改正数();for (int i = 0; i < 6; i++){for (int j = 0; j < 1; j++){output += XX[i, j] + "\t\n";}}if (Math.Abs(XX[3, 0]) >= 0.000029 && Math.Abs(XX[4, 0]) >= 0.000029 && Math.Abs(XX[5,0]) >= 0.000029){for (int d = 1; d < s; d++){求改正数();for (int i = 0; i < 6; i++){for (int j = 0; j < 1; j++){output += XX[i, j]+ "\t\n";}}if (Math.Abs(XX[3, 0]) <= 0.000029 && Math.Abs(XX[4, 0]) <= 0.000029 &&Math.Abs(XX[5, 0]) <= 0.000029){输出();break;}}if (Math.Abs(XX[3, 0]) >= 0.000029 || Math.Abs(XX[4, 0]) >= 0.000029 ||Math.Abs(XX[5, 0]) >= 0.000029){MessageBox.Show("已达到指定迭代次数,迭代结束!!!");MessageBox.Show(output, "后方交会", MessageBoxButtons.OK,rmation);}}else{输出();}}public void 输出(){_Xs.Text = Xs.ToString();_Ys.Text = Ys.ToString();_Zs.Text = Zs.ToString();_q.Text = q.ToString();_w.Text = w.ToString();_k.Text = k.ToString();}private void button1_Click(object sender, EventArgs e) {try{f = double.Parse(textBox1.Text);}catch{MessageBox.Show("请先输入主距");}s = int.Parse(textBox2.Text);m = int.Parse(textBox3.Text);计算N();int i=0;int j = i;for ( i = 0; i < a.Length; i += 5){x[j] = double.Parse(a[i]);y[j] = double.Parse(a[i + 1]);X[j] = double.Parse(a[i + 2]);Y[j] = double.Parse(a[i + 3]);Z[j] = double.Parse(a[i + 4]);j++;}计算初始值();}private void button2_Click(object sender, EventArgs e){迭代();}private void button3_Click(object sender, EventArgs e){MessageBox.Show("请将点坐标文件保存到d盘根目录并保存为\"控制点 .txt\"\n要求每行一个值,五行表示一个点\n测绘101徐斌");}}}添加Matrix.cs类程序using System;using System.Collections.Generic;using System.Linq;using System.Text;namespace 后方交会1{public class Matrix{//构造方阵public Matrix(int row){m_data = new double[row, row]; }public Matrix(int row, int col) {m_data = new double[row, col]; }//复制构造函数public Matrix(Matrix m){int row = m.Row;int col = m.Col;m_data = new double[row, col]; for (int i = 0; i < row; i++) for (int j = 0; j < col; j++) m_data[i, j] = m.m_data[i, j];}//设为单位阵public void SetUnit(){for (int i = 0; i < m_data.GetLength(0); i++) for (int j = 0; j < m_data.GetLength(1); j++) m_data[i, j] = ((i == j) ? 1 : 0);}//设置元素值public void SetValue(double d){for (int i = 0; i < m_data.GetLength(0); i++) for (int j = 0; j < m_data.GetLength(1); j++) m_data[i, j] = d;}//返中行数public int Row{get{return m_data.GetLength(0);}}//返回列数public int Col{get{return m_data.GetLength(1);}}//重载索引 ,存取数据成员public double this[int row, int col] {get{return m_data[row, col];}set{m_data[row, col] = value;}}//初等变换对调两行:ri<-->rjpublic Matrix Exchange(int i, int j) {double temp;for (int k = 0; k < Col; k++){temp = m_data[i, k];m_data[i, k] = m_data[j, k];m_data[j, k] = temp;}return this;}//初等变换第index 行乘以mulMatrix Multiple(int index, double mul){for (int j = 0; j < Col; j++){m_data[index, j] *= mul;}return this;}//初等变换第src行乘以mul加到第index行Matrix MultipleAdd(int index, int src, double mul) {for (int j = 0; j < Col; j++){m_data[index, j] += m_data[src, j] * mul;}return this;}//transpose 转置public Matrix Transpose(){Matrix ret = new Matrix(Col, Row);for (int i = 0; i < Row; i++)for (int j = 0; j < Col; j++){ret[j, i] = m_data[i, j];}return ret;}//矩阵乘public static Matrix operator *(Matrix lhs, Matrix rhs){if (lhs.Col != rhs.Row) //异常{System.Exception e = new Exception("相乘的两个矩阵的行列数不匹配"); throw e;}Matrix ret = new Matrix(lhs.Row, rhs.Col);double temp;for (int i = 0; i < lhs.Row; i++){for (int j = 0; j < rhs.Col; j++){temp = 0;for (int k = 0; k < lhs.Col; k++){temp += lhs[i, k] * rhs[k, j];}ret[i, j] = temp;}}return ret;}//功能:返回列主元素的行号//参数:row为开始查找的行号//说明:在行号[row,Col)范围内查找第row列中绝对值最大的元素,返回所在行号int Pivot(int row){int index = row;for (int i = row + 1; i < Row; i++){if (m_data[i, row] > m_data[index, row])index = i;}return index;}//逆阵:使用矩阵的初等变换,列主元素消去法public Matrix Inverse(){if (Row != Col) //异常,非方阵{System.Exception e = new Exception("求逆的矩阵不是方阵");throw e;}Matrix tmp = new Matrix(this);Matrix ret = new Matrix(Row); //单位阵ret.SetUnit();int maxIndex;double dMul;for (int i = 0; i < Row; i++){maxIndex = tmp.Pivot(i);if (tmp.m_data[maxIndex, i] == 0){System.Exception e = new Exception("求逆的矩阵的行列式的值等于0,"); throw e;}if (maxIndex != i) //下三角阵中此列的最大值不在当前行,交换{tmp.Exchange(i, maxIndex);ret.Exchange(i, maxIndex);}ret.Multiple(i, 1 / tmp[i, i]); tmp.Multiple(i, 1 / tmp[i, i]); for (int j = i + 1; j < Row; j++) {dMul = -tmp[j, i] / tmp[i, i]; tmp.MultipleAdd(j, i, dMul);ret.MultipleAdd(j, i, dMul);}}for (int i = Row - 1; i > 0; i--) {for (int j = i - 1; j >= 0; j--) {dMul = -tmp[j, i] / tmp[i, i]; tmp.MultipleAdd(j, i, dMul);ret.MultipleAdd(j, i, dMul);}}return ret;}//是方阵吗,public bool IsSquare(){return Row == Col;}//是对称阵吗,public bool IsSymmetric(){if (Row != Col)return false;for (int i = 0; i < Row; i++)for (int j = i + 1; j < Col; j++) if (m_data[i, j] != m_data[j, i]) return false;return true;}//公有数据成员public double[,] m_data;}}4(实验结果四(实验总结此次实验让我深入了解单像空间后方交会的计算过程,加强了对空间后方交会基本公式和误差方程式,法线方程式的记忆。
空间后方—前方交会的原理以空间后方—前方交会的原理为题,我将为你创作一篇文章。
标题:穿越时空的奇妙旅程在广袤的宇宙中,隐藏着许多神秘的现象和令人着迷的规律。
其中一个令人着迷的现象就是空间后方—前方交会的原理。
它是一种神奇的现象,让我们能够穿越时空,以人类的视角来探索宇宙的奥秘。
空间后方—前方交会的原理是指当我们处于宇宙中的一个位置时,我们可以观察到在我们前方的一些星体,而当我们移动到另一个位置时,这些星体会出现在我们后方。
这一现象的解释是,宇宙中的光需要一定的时间才能传播到我们的眼睛,所以我们观察到的是过去的景象。
当我们移动到一个新的位置时,我们所看到的星体的光线需要更长的时间才能到达我们的眼睛,所以它们似乎是在我们的后方。
这一现象的实际应用非常广泛。
例如,天文学家利用这一原理来观测遥远的星系和行星。
他们通过观察不同位置的天体,可以了解宇宙的演化和发展。
空间后方—前方交会的原理也被用于导航系统中。
当我们使用GPS导航时,系统会根据我们所处的位置和目的地的坐标来计算最短路径,这就是因为导航系统利用了空间后方—前方交会的原理。
除了科学和技术应用,空间后方—前方交会的原理也给我们带来了思考。
当我们思考宇宙的边界和它的起源时,我们不禁想象着是否有一种方法让我们在时间上穿越,去看到宇宙的诞生。
虽然目前我们还无法实现这一愿望,但这种思考激发了我们对宇宙的好奇心和探索欲望。
通过空间后方—前方交会的原理,我们可以以人类的视角来探索宇宙的奥秘。
我们可以欣赏到遥远星系的美丽,感受到宇宙的壮丽景象。
这种体验让我们感到宇宙的无限广阔和无穷魅力。
它让我们意识到人类在宇宙中的渺小,但同时也让我们认识到人类的智慧和勇气。
正是因为空间后方—前方交会的原理,我们能够以人类的视角来探索宇宙的奥秘。
这一神奇的现象让我们感受到宇宙的无限魅力,并激发了我们对宇宙的好奇心和探索欲望。
让我们一起穿越时空的奇妙旅程,去探索更多未知的宇宙奥秘。
后方交会的原理后方交会是测量学中一种常用的方法,可以用来确定点的位置,尤其是在地图制图、土地测量、建筑设计等领域中。
本文将从定义、原理、步骤、误差分析等方面详细介绍后方交会的原理。
一、定义后方交会是一种测量学方法,通过已知控制点的坐标、方位角等信息,对未知点进行定位。
它是一种基于三角测量原理的方法,通过三角形相似原理计算出未知点的坐标。
后方交会可以用来测量平面坐标、高程、方位角等,适用于各种地形和地貌。
二、原理后方交会的原理基于三角测量原理,即以三个已知点为顶点的三角形,其内部所有角度和三个顶点的距离都是已知的。
通过测量三角形内角和三边长度,可以计算出未知点的坐标。
具体来说,后方交会的原理可以分为以下几个步骤:1.测量控制点的坐标和方位角首先需要测量控制点的坐标和方位角,以确定已知点的位置和方向。
控制点可以是已知点,也可以是通过前方交会计算出的点。
2.测量未知点与控制点之间的距离和方位角接下来需要测量未知点与控制点之间的距离和方位角。
距离可以通过测距仪、激光测距仪等设备进行测量,方位角可以通过经纬仪或罗盘进行测量。
3.计算三角形内角和三边长度通过测量三角形内角和三边长度,可以计算出未知点的坐标。
其中,内角可以通过三角函数计算,三边长度可以通过勾股定理计算。
4.检验后方交会的精度最后需要对后方交会的精度进行检验,可以通过误差分析等方法进行评估。
如果误差较大,可以通过增加控制点、提高测量精度等方式进行调整。
三、步骤后方交会的步骤可以总结为以下几个:1.确定控制点的位置和方向,测量其坐标和方位角。
2.测量未知点与控制点之间的距离和方位角。
3.计算三角形内角和三边长度,确定未知点的坐标。
4.检验后方交会的精度,评估误差。
四、误差分析后方交会的精度受到多种因素的影响,如测量仪器精度、控制点布设精度、天气环境等。
误差分析可以通过以下几种方法进行: 1.重复测量法重复测量法是通过多次测量同一点来评估测量精度的方法。
空间后方交会实验报告1. 引言空间后方交会是一种常用的测量手段,用于确定目标在空间中的坐标位置。
本实验旨在通过空间后方交会实验,了解空间测量的基本原理和方法,并锻炼我们的观察、计算和推理能力。
2. 实验目的- 学习和掌握空间后方交会实验的基本原理和步骤;- 熟悉使用测量仪器和处理数据的方法;- 锻炼团队合作和问题解决能力。
3. 实验原理空间后方交会利用多个测量设备,通过测量目标物体在不同位置上的观测数据,计算出目标物体的空间坐标。
主要基于以下原理:- 多点定位原理:通过多次测量目标物体在不同位置上的观测数据,可以确定目标物体的坐标位置;- 观测误差校正原理:由于观测仪器的误差存在,需要对观测数据进行误差校正,以提高测量精度。
4. 实验步骤4.1 实验准备- 确定实验区域,搭建固定的测量基准点;- 使用全站仪对测量基准点进行校准,确保测量精度;- 准备至少三个可移动的晶体棱镜,用于固定在目标物体上;- 准备笔记本电脑和相应的测量软件,用于数据处理和计算。
4.2 实验操作1. 将晶体棱镜固定在目标物体上,并确定测量的起始位置;2. 使用全站仪测量目标物体在不同位置上的观测数据,包括水平角、垂直角和斜距;3. 将观测数据导入计算软件,并进行误差校正;4. 根据误差校正后的观测数据,计算目标物体的空间坐标;5. 重复步骤2至4,获得更多的观测数据,以提高计算精度;6. 对多次观测结果进行平均计算,得到最终的目标物体空间坐标;7. 将计算结果进行分析和评估,确定测量精度和可靠度。
5. 实验结果与讨论经过实验操作和数据处理,获得了目标物体的空间坐标。
通过对测量结果的分析和比较,可以得出以下结论:- 目标物体的空间坐标可以通过空间后方交会实验进行测量和计算;- 观测数据的误差校正对测量结果的精度和可靠度具有重要影响;- 重复观测和平均计算可以提高测量结果的准确性。
6. 实验总结空间后方交会实验是一种常用的测量手段,可以用于测量目标物体在空间中的坐标位置。
后方交会法原理在测量领域中,后方交会法是一种常用的方法,它可以用于确定已知控制点的位置以及未知点的坐标。
后方交会法是基于三角形相似原理的测量技术,它可以通过对已知控制点的距离和方位角度的测量,来计算出未知点的坐标。
本文将详细介绍后方交会法的原理和应用。
一、后方交会法原理后方交会法是基于三角形相似原理的测量技术,它是通过已知控制点的位置和方位角度的测量,来计算未知点的坐标。
具体来说,后方交会法的原理包括以下几个步骤:1.测量控制点的位置和方位角度在后方交会法中,需要测量已知控制点的位置和方位角度。
控制点是已知坐标的点,通常是在测量区域的边界或者是在地面上的显著点。
测量控制点位置的方法有很多种,包括全站仪、GPS等。
方位角度是指测量点相对于一个已知方向的角度,可以通过全站仪或者经纬仪等测量仪器来测量。
2.测量未知点与控制点之间的距离和角度在已知控制点的基础上,需要测量未知点与控制点之间的距离和角度。
距离可以通过测距仪等仪器来测量,角度可以通过全站仪等仪器来测量。
需要注意的是,测量时需要保证控制点与未知点之间的视线畅通,以确保测量的准确性。
3.计算未知点的坐标通过已知控制点的坐标、方位角度和未知点与控制点之间的距离和角度,可以利用三角形相似原理来计算未知点的坐标。
具体计算公式如下:X = X0 + L * sin(A + α)Y = Y0 + L * cos(A + α)其中,X0和Y0是已知控制点的坐标,A是控制点与未知点之间的方位角度,α是未知点与控制点之间的角度,L是未知点与控制点之间的距离。
通过以上公式,可以计算出未知点的坐标。
二、后方交会法的应用后方交会法在测量领域中应用广泛,可以用于确定已知控制点的位置以及未知点的坐标。
以下是后方交会法的一些应用场景:1.地形测量在地形测量中,后方交会法可以用于确定山顶、山脚、河流等地形特征点的坐标。
通过测量已知控制点的位置和方位角度,以及未知点与控制点之间的距离和角度,可以计算出未知点的坐标,从而确定地形特征点的位置。