基于初始位置的高速公路快速地图匹配算法
- 格式:pdf
- 大小:907.84 KB
- 文档页数:6

总781期第十一期2022年6月河南科技Henan Science and Technology信息技术基于车辆GPS轨迹数据的农村公路地图匹配算法毛海臻1毛华2(1.河南省交通规划设计研究院股份有限公司,河南郑州450000;2.鹤壁市淇滨区交通运输局,河南鹤壁458030)摘要:为了提升农村地区车辆轨迹与县乡路网的匹配精度,解决车辆行驶轨迹飘移、点位跳跃等问题,本研究基于隐形马尔可夫理论,通过划分农村公路网格,计算观测概率与转移概率乘积的最大值,然后通过编程建模筛选出最佳候选路线,实现车辆轨迹与农村路网的在线匹配。
笔者选取平顶山市宝丰县某农村公路为研究对象,现场验证了该算法的可行性和有效性。
试验结果表明:该算法能够提升农村公路车辆轨迹的匹配精度,在路线十字、T形交叉及平曲线中点等区域的轨迹匹配精度提升效果明显。
关键词:农村公路;GPS轨迹数据;地图匹配中图分类号:U418.6文献标志码:A文章编号:1003-5168(2022)11-0022-04 DOI:10.19968/ki.hnkj.1003-5168.2022.11.004Rural Road Map Matching Algorithm Based on Vehicle GPS TrajectoryDataMAO Haizhen1MAO Hua2(1.Henan Communications Planning&Design Institute Co.,Ltd,Zhengzhou450000,China;2.Hebi Qibin District Transportation Bureau,Hebi458030,China)Abstract:In order to improve the matching accuracy between vehicle trajectory and county and township road network in rural areas,and solve the problems of vehicle trajectory drift,point jumping and so on. With the help of hidden Markov theory,this paper divides the rural road grid,calculates the maximum product of observation probability and transfer probability,selects the best candidate route through pro⁃gramming modeling,and realizes the online matching between vehicle trajectory and rural road network.A rural highway in Baofeng County,Pingdingshan City is selected as the experimental object to verify the feasibility and effectiveness of the algorithm.The results show that the algorithm can improve the track matching accuracy of rural road vehicles.In the areas of route cross,T-shaped cross and the midpoint of horizontal curve,the track matching accuracy is obviously improved.Keywords:rural highway;GPS track data;map matching0引言近年来,我国乡村公路发展迅速,截至2021年10月,全国农村公路通车里程达到438.2万km。

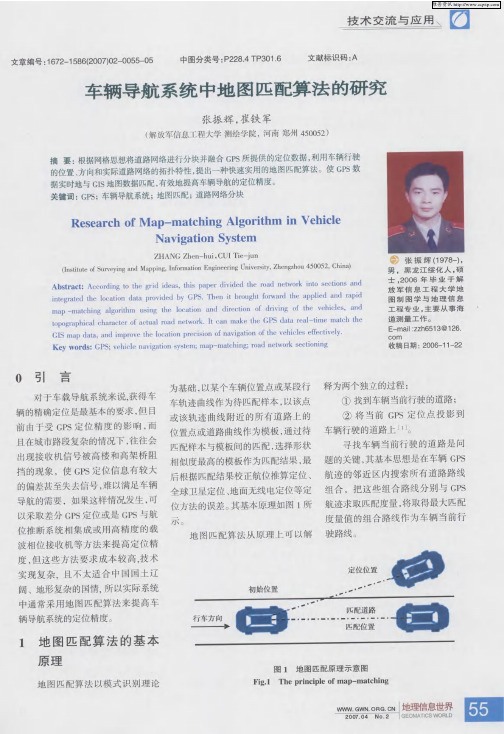
地图匹配算法综述一、地图匹配:现有算法车辆导航系统实时接收GPS位置速度信息,以交通地图为背景显示车辆行驶轨迹。
保证所显示的轨迹反映车辆的实际行驶过程,包括行驶路段,转弯过程及当前位置,就是地图匹配问题所要解决的目标。
本节首先对地图匹配问题涉及到的基础概念、误差模型给出简要说明,同时介绍当前流行的一些地图匹配算法的思路与特点。
1.1 地图匹配问题介绍利用车载GPS接收机实时获得车辆轨迹,进而确定其在交通矢量地图道路上的位置,是当前车载导航系统的基础。
独立GPS车载导航系统中克服GPS误差以及地图误差显示车辆在道路网上的位置主要是通过地图匹配算法,也就是根据GPS信号中的数据和地图道路网信息,利用几何方法、概率统计方法、模式识别或者人工神经网路等技术将车辆位置匹配到地图道路上的相应位置[8-12]。
由于行驶中的车辆绝大部分都是在道路上的,所以通常的地图算法都有一个车辆在道路上的默认前提。
地图匹配的准确性决定了GPS车辆导航系统的准确性、实时性与可靠性。
具体来说取决于两方面:确定当前车辆正在行驶的路段的准确性与确定车辆在行驶路段上的位置的准确性。
前者是现有算法的研究重点,而后者涉及到沿道路方向的误差校正,在现有算法中还没有得以有效解决。
地图匹配的目标是将轨迹匹配到道路上,当道路是准确的时,也就成了确定GPS的准确位置,然后利用垂直映射方法完成匹配。
要实时获得车辆所在的道路及位置通过地图匹配来实现是一种比较普遍而且成本较低的方法。
车辆导航与定位系统中的地图匹配问题概括来讲就是将车载GPS接收机获得的带有误差的GPS轨迹位置匹配到带有误差的交通矢量地图道路上的相应位置。
下面我们通过具体的数学模型来给地图匹配问题以详细的数学描述。
地图匹配的基本过程如图4.1所示。
符号定义及其物理意义说明如下:图4.1 地图匹配模型1) g(k)是车辆GPS轨迹点,内容为k时刻车辆上的GPS定位数据(经纬度),对应于矢量地图上相应的经纬度位置点。
第25卷 第3期2005年3月北京理工大学学报T r ansactions of Beijing Instit ut e of T echnolog y V ol.25 N o.3M ar.2005 文章编号:1001-0645(2005)03-0225-05一种适于车辆导航系统的快速地图匹配算法付梦印, 李 杰, 邓志红(北京理工大学信息科学技术学院自动控制系,北京 100081)摘 要:在分析影响地图匹配算法实时性、鲁棒性及匹配精度因素的基础上,依据车辆运动的连续性,引入道路网络的分块思想,并利用车辆行驶的位置、方向信息及实际道路网络的拓扑特性,提出一种时间复杂度为O (c )的快速地图匹配算法.对实际跑车数据的仿真结果表明,该算法的匹配正确率不低于95%,单点匹配时间不超过0.01ms.关键词:车辆导航系统;地图匹配;道路网络分块中图分类号:T P 312 文献标识码:AA Quick Map Matching Algorithm for Vehicle Navigation SystemsFU M eng-y in, LI Jie, DENG Zhi-hong(Depar tment of A uto matic Contr ol,Schoo l of Infor mation Science and T echnolog y ,Beijing Inst ituteo f T echno log y,Beijing 100081,China)Abstract :Based on analyzing the factors of affecting real-time perform ance,robustness,and matching precisio n of the map matching alg orithm ,and according to the continuity of the v ehicle mov em ent,the idea of partitioning the road net into so me grids is ing the inform ation about the position and the direction of the vehicle running and the to pological feature of the road netw o rk ,a quick map m atching algo rithm ,o f w hich the time complexity is O (c ),is pr opo sed .Sim ulating results aim ed at the practical running data show that the co rrect rate abo ut the new alg orithm is no less than 95%and the matching time for the individual positioning point is less than 0.01ms.Key words :vehicle navigation sy stem;map matching;road net partitio n 收稿日期:20040420基金项目:国家部委预研项目(102364)作者简介:付梦印(1964-),男,教授,博士生导师,E-mail:Fumy@bit.ed . 在实际车辆导航系统中,由于各种因素,在导航电子地图上经常出现车辆轨迹曲线偏离实际行驶道路的情况,这不仅会给驾驶员造成视觉上的错觉,而且这种错误的决策信息有时可能导致更为严重的后果,因此,研究如何快速、可靠、合理有效地减小这种误差,对提高车辆导航系统的性能非常有益.地图匹配是减小误差的一种有效方法[1~6].目前,对于地图匹配不少学者提出了若干算法,如基于最短距离、基于模式识别和基于模糊逻辑的地图匹配算法等[1~7],这些算法在减小系统定位误差方面都各有优缺点,然而,其中多数算法对实时性和鲁棒性研究相对较少,而且在提高地图匹配精度的过程中,所采用的方法也比较单一,对可用信息的利用不够,致使实用性不是太好.作者结合嵌入式GPS /电子地图车载导航系统,设计了一种适用于车辆导航系统的快速地图匹配算法.1 影响地图匹配算法的因素实时性、鲁棒性及匹配精度是衡量地图匹配算法质量的3个重要指标,成功的地图匹配算法应该兼有较强的实时性和鲁棒性,以及较高的匹配精度.1.1 影响实时性的因素地图匹配过程主要包括匹配候选路段的确定及候选路段匹配规则两部分,其中前者是影响匹配算法实时性的主要因素,这点在道路网络的规模增大时表现愈发明显.一般来讲,匹配候选路段的确定时间越长,匹配规则越复杂,匹配算法的实时性越差,反之亦然.现有的匹配算法,虽然匹配规则及选取匹配候选路段时设定的条件不尽相同,但候选路段的选取都需要遍历整个道路网络,致使其实时性随着道路网络规模的增大明显下降.1.2 影响鲁棒性的因素匹配算法的鲁棒性主要体现在匹配算法能否有效地处理匹配过程中可能出现的各种异常(如GPS 接收数据无效或误差较大、车辆低速滑行或停止等),以使匹配算法遇到这些异常时,能够做出合理处理,而不影响后续工作.1.3 影响匹配精度的因素从地图匹配过程可以看出,影响匹配精度的因素主要有[6]:GPS的定位误差.GPS的定位误差包括系统内部误差和外部突变误差.前者主要是指由卫星测量及其几何分布所引起的误差,目前,在GPS接收机正常工作时,内部误差能以95%的置信概率落入半径为20m的圆内;后者则是由于高楼等地物阻挡,使GPS接收机对部分卫星失去锁定,定位数据产生较大漂移所引起的.坐标转换误差.由于GPS接收机所接收到的定位数据属于WGS-84地心坐标系,而我国目前的导航电子地图多采用北京54和西安80平面直角坐标系,因此GPS的定位结果必须通过相应的坐标转换,变换到导航电子地图所采用的坐标系.一般认为,由坐标转换带来的误差不超过10m.电子地图数据库误差.由于地图匹配是将定位数据与电子地图数据库中道路层数据进行匹配,所以地图数据库的数据质量对匹配精度有重要影响,目前,电子地图数据库的误差一般认为不超过15 m.2 道路网络分块与匹配候选路段确定车辆运动的一个客观事实是,车辆在行驶过程中总是连续运动的,不可能从一点突变到距离较远的另一点,譬如,在车速小于20m/s的情况下,如果GPS接收机正常工作,那么即便考虑各项误差在内,系统定位模块给出的车辆定位结果中相邻两点间的距离都不可能大于200m,受此启发,将道路网络分块思想引入地图匹配中,以提高匹配算法的实时性.2.1 道路网络分块以200m为步长(也可根据实际系统设为其它合理步长),将道路网络从上到下、由左至右网格化均匀分块,假设将其分为M×N个网格,简记为Grid(M×N),其中,M和N分别为分块行列数,网格的行编号从0到M-1,列编号从0到N-1,记录每个网格包含或相交的所有路段编号,保存其左上角坐标作为它的起始坐标以便索引,该步在加载电子地图数据库的初始化阶段完成.2.2 待匹配定位点到相应网格的快速索引在给定待匹配的车辆定位点P(x,y)后,用折半查找法快速找到P点所在的网格号Grid(i,j),其中:i∶=flo or(y*200/Heig htOfScreen); ∥变量i代表当前定位点所在的网格行号j∶=floor(x*200/WidthOfScreen); ∥变量j代表当前定位点所在的网格列号以20km长,20km宽的路网数据为例,算法为找到P(x,y)点所在网格Gr id(i,j),最多不超过14次比较运算即可,所需时间极少,基本上不受道路网络规模变化的影响.2.3 匹配候选路段的确定如果P(x,y)是第1个定位点或匹配算法遇到异常,则为进行匹配,候选路段的选取必须先由点P(x,y)找到与其对应的网格Grid(i,j),然后将与该网格相邻的其它若干网格一并作为匹配候选网格,进而将这些候选网格包含的路段初步确定为候选路段;相反,如果P(x,y)不是第1个定位点,且匹配算法也没有遇到异常,则P(x,y)所在网格只可能是前一网格Gr id(i,j)或与其相邻的网格之一.这样,通过对道路网络的分块处理,匹配候选路段的选取便基本上与道路网络的规模无关,匹配算法只需对落入匹配网格内的匹配候选路段进行匹配226北京理工大学学报第25卷 处理,由于该候选路段与整个路网中的路段相比数目甚少,因此,分块思想使匹配算法的实时性极大地提高.3 匹配过程中的异常处理匹配算法可能遇到的异常主要包括以下2种.3.1 GPS工作不正常或输出数据不可靠判断发生这种异常的方法是判断车辆是否出现行驶速度异常,即2个连续定位点间的距离是否明显大于正常距离(设计中将其设为正常时对应值的3倍),若大于正常距离,表明出现异常.匹配算法一旦检测出异常,则依据车辆行驶的历史轨迹推测车辆当前可能的位置,从而进行线性插值处理以消除部分误差.需说明的是,由于这种推测匹配方法是建立在当前车辆正常行驶的前提下,因此,它只能在车辆运行没有超出该拓扑路段的短时间内起作用,一旦行驶到交叉路口,则停止使用推测匹配算法.3.2 车辆停止运行或低速滑行时的定位漂移在车辆停止运行或低速滑行接近于停止时,理论上车辆定位点应该保持不动或基本不动,然而,由于GPS定位误差的随机漂移,使得系统定位模块给出的车辆位置信息,常在以车辆当前实际所处位置为圆心的一个圆形区域内随机抖动.判断发生这种异常的方法是计算当前定位点与其前几个定位点(设计中取为3)的距离,若它们持续小于GPS正常定位时的误差上限,则说明车辆当前基本处于停止或极低速滑行状态,此时,可将与当前定位点对应的匹配点作为车辆当前的真实位置而不对后续定位点进行匹配,直到前面的3个距离值开始大于GPS正常定位时的误差上限为止.4 算法设计及时间复杂度分析4.1 算法设计的前提和原则算法设计的前提是,假设车辆始终在道路上行驶,且道路网络数据是相对精确的.同时,为尽可能提高匹配正确率,算法还约定匹配过程中必须遵循如下原则:如果2条或多条候选路段的匹配度(即候选路段作为匹配路段的度量值,是本算法为衡量候选路段是匹配路段可能性大小引入的一个概念)之差小于某个阈值,则它们都不能作为最终匹配路段,此时,匹配算法暂不对当前定位点进行误差校正,直到匹配度之差大于该阈值后再进行延时校正.4.2 匹配算法可用信息的选取及候选路段的匹配度设计可用信息的选取.可用来判断车辆当前可能在哪条路段上行驶的信息主要有3个,即当前车辆定位点距候选路段的投影距离、车辆当前行驶方向与候选路段方向的夹角及候选路段与前一匹配路段的几何拓扑关系.一般来讲,投影距离和方向夹角越小的候选路段成为匹配路段的可能性越大,反之亦然.此外,与前一匹配路段相同或拓扑相连的候选路段成为匹配路段的可能性大,其余的可能性小.候选路段的匹配度设计[3~5].依据 中对匹配可用信息的分析,本算法将匹配度定义为与投影距离d与方向夹角 有关的函数,f(d, )=w d d+w .(1)式(1)表示,每条候选路段的匹配度由投影距离d和方向夹角 决定,投影距离和方向夹角越小,候选路段对应的匹配度越大,其作为匹配路段的可能性也就越大,反之亦然.式中,f(d, )为候选路段的匹配度度量函数,w d和w 分别为投影距离d和方向夹角 在匹配度度量函数中所占的权重,且满足关系式w d+w =1,具体取值随当前车辆定位点在路网中的位置不同,在集合{[0.4,0.6],[0.5,0.5]}中自动变化,若程序判断到当前定位点位于某道路交叉口附近,则加大对角度信息的信任,权值将取为w d =0.4,w =0.6,其余情况认为二者同等重要,权值将取w d=w =0.5,d和 分别为投影距离d和方向夹角 所对应的归一化值,设计中将d和 设计为如式(2)所示的解算表达式d i=1/d i∑Ni=11/d i; i=1/ i∑Ni=11/ i,(2)式中:N为匹配候选路段数;d i和 i分别为第i条匹配候选路段所对应的投影距离和方向夹角,通常d i 和 i不等于0,若等于0,可令它们为一个很小的数;d i和 i分别为第i条候选路段所对应投影距离和方向夹角的归一化值.这样,在匹配过程中,先计算N条候选路段各自对应的匹配值f i(i=1,2,…,N),然后从中选出最大匹配值f m和次大匹配值f n并进行比较,如果f m-f n>f th1(f th1是为判断两条路段是否具有相近匹配值而引入的一个阈值,设计中取为0.3),且f m>f th2 (f th2是为提高某条路段是匹配路段可信度而引入的另一个阈值,设计中取为0.8),那么将与最大匹配值f m相对应的路段m作为对当前定位点的匹配路段,227 第3期付梦印等:一种适于车辆导航系统的快速地图匹配算法相应的投影点作为匹配位置.需说明的是,其中的匹配路段数N是指位于候选网格内部,且满足与前一匹配路段具有道路拓扑关系的路段数.4.3 快速匹配算法步骤快速匹配算法的执行步骤如下:步1 接收GPS定位数据;步2 判断定位数据是否无效,若无效,则根据历史定位数据进行推测匹配,然后转(8);步3 判断车辆当前是否处于停止或低速滑行状态,若是,对其作相应处理,然后转(8);步4 由车辆当前位置点计算其对应的候选网格,进而获取其中的路段;步5 对步4得到的路段进行连接性拓扑检查,将通过拓扑检查的路段作为匹配候选路段;步6 判断匹配候选路段数目,若唯一,则直接将其作为匹配路段,并由定位点向其作投影,然后转(8);否则,计算所有候选路段的匹配度度量值f i(i=1,2,…,N),从中选出最大值f m和次大值f n;步7 判断最大值f m和次大值f n之差是否大于阈值f th1且最大值f m是否大于阈值f th2,如果大于,则将路段m作为匹配路段,并由定位点向其作投影;否则,暂不对本次定位结果进行匹配,待后面对其进行延时匹配处理;步8 结束本次匹配.4.4 快速匹配算法时间复杂度分析由于快速地图匹配算法对每条匹配候选路段的处理只需常数时间,而候选路段的确定时间在最坏情况下也不超过常数N(本设计N=14)次简单的比较运算(一般只需4次比较运算),因此,整个快速匹配算法的时间复杂度是与道路网络规模无关的常数时间O(c).5 应用实例及结果分析为了验证本文所提出的快速匹配算法,结合嵌入式GPS/电子地图车辆导航系统的实际,作者用该算法对北京市内的多次实地跑车数据进行了匹配处理,限于篇幅,此处仅给出对2003年5月28日实地跑车数据的匹配处理结果,跑车实验路线:北京理工大学北门→苏州桥→紫竹院桥→首都体育馆→四通桥→蓟门桥→学院桥→万泉河桥→北门,全程跑车时间约40min,车辆定位数据记录点2035个.图1是原始跑车轨迹,图2是加快速匹配算法后的跑车轨迹,两图中细线表示道路网络中的路段,粗线表示车辆行驶轨迹,图2中的连续小方框表示快速匹配算法在匹配过程中的实时候选网格.图1 原始跑车轨迹Fig.1 T he origin run ning track图2 加快速地图匹配算法后的跑车轨迹Fig.2 T he r unning track w ith m atch ing alg or ith m对比图1和图2可以看出,经快速匹配算法匹配后,车辆行驶轨迹基本被匹配到了车辆实际行驶的路段上(本例中2035个定位点有1968个匹配正确),仔细观察还可发现,快速匹配算法不仅能正确处理定位点附近路段比较单一的情况,而且也能较好地解决车辆在道路交叉口和并行道路附近、GPS 接收数据无效或误差较大及车辆低速滑行等一些特殊情况下的定位点匹配问题.同时,从图2还可以看出,由于引入了道路网络的分块思想,因此,在对每一个待匹配定位点进行匹配时,匹配算法只需对落入当前几个网格内的路段,按照匹配规则进行匹配处理,而不是对整个道路网络内的路段,每个定位点的平均匹配时间约为0.007ms,从而显著地提高了算法的实时性.多次实验的结果表明,快速匹配算法的匹配正确率不低于95%,单点匹配时间不超过0.01m s,而现有其它匹配算法的单点平均匹配时间一般在50m s左右,而且随着道路网络规模的增大,这种实时性差别将会更大,原因是现有匹配算法的单点匹配时间是与整个道路网络内的路段数目成正比的,而快速匹配算法的单点匹配时间与匹配候选网格内228北京理工大学学报第25卷 的路段数目成正比,与分块数目成对数关系.6 结束语作者以现有地图匹配算法为基础,分析了影响地图匹配算法各项性能的因素,充分利用车辆运动的连续特性、实际路网的拓扑特性以及车辆定位点的投影距离和方向夹角信息,引入道路网络分块的思想,并尽可能考虑实际匹配过程中可能出现的一些异常情况,设计了一种适合车辆导航系统的快速地图匹配算法,并通过对实地跑车定位数据的匹配处理,验证了所提算法的合理性、有效性和实用性.参考文献:[1] Z hao Yilin.V ehicle location and nav igat ion system[M ].L ondon:A r tech Ho use,1997.[2] 王 楠,王勇峰,刘积仁.一个基于位置点匹配的地图匹配算法[J ].东北大学学报,1999,20(4):344-347.W ang N an,Wa ng Y ong feng ,L iu Jir en.A po int-based map-mat ching alg or ithm [J ].Jo urnal ofN or theaster n U niver sity ,1999,20(4):344-347.(inChinese)[3] K im S ,K im J H.Q -facto r map matching met ho dusing adaptive fuzzy netw or k[Z].IEEE I nt ernational F uzzy Sy stems Conference ,Seo ul ,Ko rea ,1999.[4] K im S,Kim J H.A dapt ive fuzzy-netw o rk-based C-measure map mat ching alg or ithm for car navigation system [J ].IEEET r ansactionsonIndustr ialElectr onics ,2001,48(2):432-441.[5] 毕 军,付梦印,张宇河.基于D -S 证据推理的车辆导航系统地图匹配算法[J].北京理工大学学报,2002,22(3):393-396.Bi Jun ,Fu M engy in ,Zhang Y uhe .A map mat ching algo r ithm for vehicle na vig atio n sy stems based o n D -S ev idence r easoning [J ].Jo urnal o f Beijing Inst itute of T echnolo gy ,2002,22(3):393-396.(in Chinese )[6] 钟海丽,童瑞华,李 军等.GPS 定位与地图匹配方法的研究[J].小型微型计算机系统,2003,24(1):109-113.Zho ng Ha ili ,T o ng Ruihua ,L i Jun ,et al .Research on GP S positio ning matching w ith ro ad [J ].M ini-M icr o Sy stems,2003,24(1):109-113.(inChinese)[7] 苏 洁,周东方,岳春生.G PS 车辆导航中的实时地图匹配算法[J].测绘学报,2001,30(3):252-256.Su Jie,Zhou Do ngfang ,Y ue Chunsheng.Real-t ime map-matching alg or it hm in GP S nav ig atio n system for vehicles [J ].A cta Geo daetica et Car to gr aphica Sinica ,2001,30(3):252-256.(in Chinese )简讯2004年我校被三大检索收录的论文情况简报2004年12月7日在北京国际会议中心召开的“2004年中国科技论文统计结果发布会”上发布的数据表明,我校被三大检索收录的论文总量和排名较2003年有了可喜进步.1.SCI 排名由第47位上升到第40位,发表论文总数151篇,比2003年的100篇增加了51篇,提高幅度达到51%.2.IST P 排名由第12位上升到排名第9位,发表论文总数287篇,比2003年的166篇增加了121篇,提高幅度达到73%.3.EI 排名第25位,发表论文总数239篇,比2003年的170篇增加了69篇,提高幅度达到41%.229 第3期付梦印等:一种适于车辆导航系统的快速地图匹配算法。

智能交通系统中综合地图匹配算法
邹涛;陈峰;张凯
【摘要】地图匹配技术是一种纠错软件,利用电子地图和定位信息确定车辆在道路上的准确位置.在引入地图匹配问题的基础上,分析产生地图偏移的原因,提出一种融合直接投影算法、基于拓扑关系的算法、概率统计的综合地图匹配算法.通过实际试验证明该算法精度高、效率高,具有较好的实用价值.
【期刊名称】《交通科技与经济》
【年(卷),期】2014(016)002
【总页数】4页(P48-51)
【关键词】车辆定位;地图匹配;坐标转换;智能交通
【作者】邹涛;陈峰;张凯
【作者单位】南京三宝科技股份有限公司,江苏南京210002;南京信息工程大学,江苏南京210044;南京信息工程大学,江苏南京210044
【正文语种】中文
【中图分类】U495。
地图匹配算法综述一、地图匹配:现有算法车辆导航系统实时接收GPS位置速度信息,以交通地图为背景显示车辆行驶轨迹。
保证所显示的轨迹反映车辆的实际行驶过程,包括行驶路段,转弯过程及当前位置,就是地图匹配问题所要解决的目标。
本节首先对地图匹配问题涉及到的基础概念、误差模型给出简要说明,同时介绍当前流行的一些地图匹配算法的思路与特点。
1.1地图匹配问题介绍利用车载GPS接收机实时获得车辆轨迹,进而确定其在交通矢量地图道路上的位置,是当前车载导航系统的基础。
独立GPS车载导航系统中克服GPS误差以及地图误差显示车辆在道路网上的位置主要是通过地图匹配算法,也就是根据GPS信号中的数据和地图道路网信息,利用几何方法、概率统计方法、模式识别或者人工神经网路等技术将车辆位置匹配到地图道路上的相应位置[8-12]。
由于行驶中的车辆绝大部分都是在道路上的,所以通常的地图算法都有一个车辆在道路上的默认前提。
地图匹配的准确性决定了GPS车辆导航系统的准确性、实时性与可靠性。
具体来说取决于两方面:确定当前车辆正在行驶的路段的准确性与确定车辆在行驶路段上的位置的准确性。
前者是现有算法的研究重点,而后者涉及到沿道路方向的误差校正,在现有算法中还没有得以有效解决。
地图匹配的目标是将轨迹匹配到道路上,当道路是准确的时,也就成了确定GPS的准确位置,然后利用垂直映射方法完成匹配。
要实时获得车辆所在的道路及位置通过地图匹配来实现是一种比较普遍而且成本较低的方法。
车辆导航与定位系统中的地图匹配问题概括来讲就是将车载GPS接收机获得的带有误差的GPS轨迹位置匹配到带有误差的交通矢量地图道路上的相应位置。
下面我们通过具体的数学模型来给地图匹配问题以详细的数学描述。
地图匹配的基本过程如图4.1所示。
符号定义及其物理意义说明如下:图4.1地图匹配模型1)g(k)是车辆GPS轨迹点,内容为k时刻车辆上的GPS定位数据(经纬度),对应于矢量地图上相应的经纬度位置点。
智能导航系统中的地图匹配算法研究智能导航系统已经成为现代社会中不可或缺的一部分。
它通过使用先进的地图匹配算法,为人们提供了最佳的导航建议和路线规划。
本文将探讨智能导航系统中的地图匹配算法,并分析其研究意义和实际应用。
一、地图匹配算法的背景在传统的导航系统中,往往使用基于GPS定位的方法。
GPS定位虽然精确,但在具体环境中,如高楼、山地等遮挡问题很容易导致误差。
因此,针对这个问题,地图匹配算法应运而生。
地图匹配算法通过将车辆的GPS定位数据与预先加载的地图数据进行比对,找到最佳匹配的道路和位置。
这样,就可以实现更加准确和可靠的导航系统。
二、地图匹配算法的原理地图匹配算法的主要原理是通过计算车辆GPS定位数据与地图上路段的匹配度,从而确定最佳匹配道路和位置。
具体来说,地图匹配算法首先提取车辆GPS定位数据的关键特征,如位置、速度、方向等。
然后,将这些特征与地图上的道路特征进行比对。
最后,通过匹配度的计算,确定最佳的匹配结果。
三、地图匹配算法的分类和比较地图匹配算法可以分为几种不同的类型,如基于几何的匹配算法、基于网络的匹配算法和基于统计的匹配算法等。
每种类型的算法都有其特点和适用范围。
几何匹配算法主要通过计算车辆GPS定位数据与道路几何特征的差异来确定匹配结果。
这种算法适用于道路形状简单、交通流量较小的情况。
网络匹配算法是基于道路网络结构的匹配算法。
它通过计算车辆GPS定位数据与道路网络连接关系的匹配度来确定匹配结果。
这种算法适用于道路网络复杂、交通流量大的情况。
统计匹配算法是通过对历史数据的分析和建模来确定匹配结果。
它将车辆的GPS定位数据与大量的历史数据进行比较,通过统计匹配度的计算,找到最佳的匹配结果。
四、地图匹配算法的实际应用地图匹配算法在智能导航系统中有着广泛的应用。
它可以提高导航系统的准确度和实时性,并为用户提供更好的导航体验。
首先,地图匹配算法可以实现实时路况监测和交通拥堵预测。
通过对车辆GPS 定位数据的不断更新和匹配,可以及时获取道路的交通状态,并根据这些信息进行路线规划和导航建议。