蔬菜嫁接机器人的系统分析
- 格式:docx
- 大小:40.24 KB
- 文档页数:7
农业机器人的特点及应用模式分析作者:梁晨宇来源:《农业开发与装备》 2018年第1期摘要:近年来,我国科学技术发展迅速,新技术、新设备在农业生产中应用日益广泛,有效促进了我国农业生产效率。
农业机器人是指可以像人体一样感知信息和行动的农业生产机械设备,在农业生产中应用农业机器人除了能大大减轻人的劳动作业强度,提升劳动生产效率,促进生产质量提高,还能有效避免化肥农药等化学物品对人体的危害。
主要阐述农业机器人的特点及其在农业生产中的实际应用。
关键词:机器人技术;农业;特点;应用1前言随着科学技术的不断发展,我国综合国力大幅度提升,农业机械化的高速发展大大提高了我国农业生产水平。
但由于我国近年来耕地面积逐年递减且人口增长持续加快,现代农业对精细化农业的需求日益增加,使得具有高效率、低能耗、低污染的智能化农业生产设备——农业机器人应运而生。
农业机械化是发展现代化新农业的重要里程碑,农业机器人作为农业机械化发展趋向成熟的重要标志,它充分结合了新型机械人技术、自动化技术和智能化技术,它的出现为机械化农业的持续发展提供了更加广阔的舞台。
2农业机器人的特点分析农业机器人之所以具有较高的生产效率,是因为它可以在实际农业生产作业中真实模拟人的具体作业动作,在生产作业新型技术的辅助下,能替代人在不良环境条件下进行生产作业,提高农业生产作业质量。
与传统的工业生产机器人相比,农业机器人在复杂多变的作业环境中,能通过感知信息和模拟行动进行作业生产,它所拥有的显著优势。
2.1作业对象复杂与普通工业材料不同,农作物具有种类多、形状各异、易受损的特点,不同农作物的生长发育程度具有较大差异。
农业机器人的作业对象是农作物,因此,在应用农业机器人时需要注意躲避农作物障碍,使用合适的操作力度尽量减少对农作物的伤害,避免影响农作物的正常生长。
2.2作业环境多变随着时间推移,农作物在天气、光照、湿度、温度等因素的影响下会不断生长发育,这就要求农业机器人必须具备适应开放性作业环境的性能。
一.市场调研1.机械嫁接的必要性嫁接用的砧木苗直径和接穗苗直径都较小,仅几毫米,并且幼苗脆嫩细弱,所以手工嫁接很耗费精力。
而且,每个人所掌握的嫁接技术要领、手法及熟练程度不同,难以保证较高的嫁接质量和较高的成活率。
.由于嫁接费工费时,有些地区出现了放弃嫁接栽培的现象,而靠大量施用农药防病治病。
这样,不但造成了资源和财物浪费,更严重的是污染了蔬菜,破坏了生态环境,对人类健康构成威胁。
蔬菜的手工嫁接技术,效率低、劳动强度大、嫁接苗成活率难以保证,因此已远远不能适应我国农业生产的要求。
在我国,发展机械化、自动化的嫁接技术势在必行。
机械嫁接技术,是近年在国际上出现的一种集机械、自动控制与园艺技术于一体的高新技术。
它可在极短的时间内,把蔬菜苗茎秆直径为几毫米的砧木、接穗的切口嫁接为一体,使嫁接速度大幅度提高;同时由于砧、穗接合迅速,避免了切口长时间氧化和苗内液体的流失,从而大大提高嫁接成活率。
2.嫁接机适用类型由于瓜类连作障碍问题越来越突出, 蔬菜嫁接技术受到人们的重视。
但目前开发出的各蔬菜嫁接机所采用的嫁接方法各异,适应的生产模式单一,适用蔬菜种类不广,还很难做到通过价格和生产率及嫁接成功率进行经济性搭配的程度。
目前蔬菜嫁接育苗生产没有统一的标准模式,各种模式之间的育苗基质、育秧钵或盘、播种方法、催芽设施、育秧设施和嫁接苗愈合设施等都不相同,各类嫁接机独特的生产要求很难与不同的模式相吻合,并且,嫁接机的自动化程度越高问题越严重。
因此,蔬菜育苗生产模式的不同制约了嫁接机的推广使用。
通过以上分析,认为根据我国农村劳动力丰富、农民整体技术水平不高、育苗机械化程度低和经济水平不高的实际国情,我国在研制全自动嫁接机提高嫁接育苗生产率的同时,应大力开发价格低廉、操作简单可靠的小型半自动嫁接机,降低嫁接作业的难度,扩大嫁接育苗技术的推广使用,以适应我国当前蔬菜生产机械化进程的需要。
二.蔬菜嫁接技术1.蔬菜嫁接方法图1 蔬菜嫁接方法2.蔬菜嫁接栽培技术现状嫁接技术早就广泛应用于园艺植物的繁殖、育种和栽培,而以果树和观赏树木等木本植物为主,在草本植物的蔬菜上则应用较少。

/发展研究|四川农业与农机/2014年6期|进方向平行滑动,可以保证机构不干扰视觉传感器。
其末端执行器由3把电热刀和围着主茎配置的气动驱动器组成,电热刀的安装位置使其可以从3个方向围住主茎,电热刀上方有V 字形引导器。
首先,视觉传感器识别需要摘除的叶子及其主茎,检测出其位置,接近被摘叶下方的主茎。
电热刀的引导器沿主茎向上滑动,叶柄总可以接触到3个电热刀中的一个,叶柄和电热刀一接触上,电流立即导通,烧断叶柄,摘除叶子。
利用热切断叶柄,还能对切断部位消毒,可以防止病菌从切口侵入。
这种机器人的采摘速度为45s/根,成功率约为80%。
2)冈山大学和井关农机株式会社于1991年合作研究了黄瓜收获机器人,这款机器人的研发是农机农艺相融合的成果。
首先,为使机器人容易进行收获作业,改进了黄瓜的栽培方式——将传统的栽培方式倾斜化,用支柱等支撑茎叶,只让果实露在棚架的下方,达到果实和茎叶分开的目的,以利于黄瓜的采摘。
这台机器人由可进行果实识别和位置检出的视觉传感器、七自由度极坐标型机械臂、可夹持果实并检出和剪断果梗的末端执行器以及移动机构构成。
1.1.3柑橘类收获机器人1)日本久保田株式会社于1988年试验、开发了柑橘收获机器人。
该机器人机械臂为三自由度垂直多关节型,小臂和大臂长度相等,肘和腕关节的速比为2∶1。
末端执行器可以沿直线运动,使机械臂不会像一般极坐标型关节一样伸向背后,从而避免了与背后的果树发生干扰。
机器工作时,频闪光源发光,末端执行器内部的摄像机随即开始采集图像,检测出果实。
机械臂靠近目标果实并用吸盘将目标果实吸入梳状罩,使其和其他果实分开,最后由锥形切刀将果梗切断。
2)美国的佛罗里达大学于1990年开发了橙子收获机器人。
这种橙子收获机器人拥有可实现左右上下和直线运动的三自由度极坐标型液压驱动以及七自由度的机械臂。
当末端执行器内置的光源、彩色摄像机检出果实之后,末端执行器就移向果实,末端执行器内置的超声波传感器检测出距离,半圆形环切刀便旋转切断果梗收获橙子。
蔬果采摘机器人的研究进展与展望随着全球人口的增长和营养素需求的增加,农业生产的规模和效率成为重要的问题。
在传统的农业生产过程中,蔬果采摘是一个人工劳动密集的环节,需要大量的人力资源和时间。
为了提高农业生产效率和减轻人力负担,蔬果采摘机器人成为了一个备受关注的研究领域。
本文将就蔬果采摘机器人的研究进展和展望进行论述。
1. 研究现状目前,蔬果采摘机器人的研究日益进展,研究内容包括机器人的设计和控制方法。
设计方面,采用机器视觉和智能算法来指导机器人的动作,使得机器人能够识别目标对象和进行自主移动。
控制方面,主要是通过传感器和执行器来实现机器人的操作,并且配备了控制系统来监测机器人的运行状态和调节机器人的行为。
在机器人的设计中,机器人的形状和结构根据目标种类的不同而有所不同,例如森林生长在土壤中的蔬菜采收机器人更具有穴居虫的形状,蔬菜的枝段收割机器人的形状则稍微弯曲,以适应蔬菜底部和的生长环境。
在机器人控制方面,对比机电传动和液压驱动,由于空气动力学的优越性和绿色环保的考虑,电动化已经成为非常流行的选择。
传感器方面,蔬果采摘机器人配备的传感器主要包括相机、雷达和超声波传感器等,可以提供足够的环境感知,使得机器人能在不同种类蔬果的环境下进行高效采摘。
此外,一个完整的采摘过程,机器人在触摸目标作物时,应同时计算出环境中其他植物利用立体视觉技术将其识别出来,以避免机器人伤害到不成熟的作物。
目前,蔬果采摘机器人具备高速度和精准性,能够快速地对任何大小和类型的蔬果进行采摘工作。
与传统的人工采摘相比,机器人能够实现快速、准确的采摘,提高了农产品质量和生产效率。
机器人在农业生产中的应用,也是社会和环境可持续发展的一个重要体现。
2. 展望未来虽然目前蔬果采摘机器人取得了一定的成果,但它依然存在一些挑战和困难。
其一是机器人的效率问题。
机器人处理速度还不够快,容易出现执行器动作不够精确、指向不准确等问题,导致采摘效果较差。

农业机器人的应用和发展现状(doc 8页)农业机器人的应用与发展现状摘要:本文总结了农业机器人的产生背景,概括了农业机器人的特点,并针对目前农业农业机器人的应用现状做了全面概述,并从国内外各个国家的农业机器人的研究状况概述了当前机器人的发展现状。
关键词:农业机器人应用现状国内外发展现状1、农业机器人的开发背景随着电子技术和计算机技术的发展,诞生于美国的智能机器人技术正越来越被世界各国所人口少随着农业生产的规模化、多样化、精确化,劳动力不足的矛盾越来越突出,许多作业项目如蔬菜、水果的挑选与采摘等都是劳动密集型工作,再加上农时季节要求,劳动力短缺的问题越来越突出。
因此,世界各国对农业机器人非常重视,投入了大量的资金和人力进行机器人的研究开发。
近年来,随着工业机器人的高速发展与广泛应用,在农业领域的机器人也发展很快,预计21世纪将是农业机器人的时代[3]。
2、农业机器人的特点农业机器人是一种以农产品为操作对象、兼有人类部分信息感知和四肢行动功能、可重复编程的柔性自动化或半自动化设备。
它能减轻劳动强度, 解决劳动力不足, 提高劳动生产率和作业质量, 防止农药、化肥等对人体的伤害[4]。
2.1作业对象的娇嫩性和复杂性农作物具有软弱、易伤的特性, 且其形状复杂, 生长发育程度不一, 相互差异很大。
2.2作业环境的结构性不统一随着农作物时间和空间的变化, 机器人工作环境也是变化的、未知的。
作物生长环境除受地形条件的约束外, 还直接受季节、天气等自然条件的影响。
这就要求农业机器人要在视觉、推理和判断等方面具有相当的智能。
2.3作业过程的复杂性农业领域的行走不是从出发点到终点的直线行走, 而是具有范围狭窄、距离较长和遍及整个田间表面等特点。
通常是农业机器人作业与移动同时进行而且工作时具有特定的位置和范围。
2.4操作对象和价格的特殊性农业机器人的操作者农民,并不具备较高的机械电子知识水平,因此农业机器人还必须具备非常高的可靠性和操作简单的特点。

果蔬嫁接切削器的研究现状马东辉,阚江明*,姚磊(北京林业大学工学院,北京100083)摘要:嫁接切削器是一种性价比高、操作方便、适应性强的新型嫁接机械。
介绍了国内外各种果蔬嫁接切削器的研究现状,对每种切削器进行了总结。
分析了当前嫁接切削器研究中存在的不足,提出了相应的解决对策。
关键词:果蔬嫁接;机械化嫁接;切削器中图分类号:S 723.2文献标识码:A文章编号:2095-2953(2013)08-0004-04Research Status of Fruit and Vegetable Cutting Devices for GraftingMA Dong-hui,KAN Jiang-ming*,YAO Lei(School of Technology,Beijing Forestry University,Beijing 100083,China )A b s r ac t :The cutting device for grafting is a kind of cost-effective,convenient and greatly adaptable new grafting m achinery.Research status of fruit and vegetable cutting devices for grafting at hom e and abroad are introduced,detailed description and sum m ary of cutting devices are conducted.Problem s existing in the research of cutting devices for grafting are analyzed and correspondingsolutions tosuch problem s arepresented.K e y w or d s:grafting of fruit and vegetables;m echanized grafting;cuttingdevice1果蔬嫁接技术概述果蔬嫁接是现代农业果蔬生产的重要环节,其包括人工嫁接和机械嫁接,目前除日本和韩国外其他国家仍以人工嫁接为主[1]。
果蔬采摘机器⼈末端执⾏器的结构组成现状分析采摘机机器末端执⾏器研究现状分析末端执⾏器是果蔬采摘机器⼈的另⼀重要部件,它的设计通常被认为是机器⼈的核⼼技术之⼀。
⼀般果蔬的外表⽐较脆弱,它的形状及⽣长状况通常复杂。
在机器⼈采摘过程中果蔬外表发⽣损伤的原因主要有:①果蔬位置识别或机械臂控制规划有误,导致末端执⾏器划伤或刺伤果蔬外表;②末端执⾏器夹持或抓取⼒过⼤,压伤果蔬外表;③末端执⾏器抓持不稳定导致果蔬掉落,与地⾯或其他坚硬物体接触⽽碰上外表。
作为采摘机器⼈的执⾏装置,末端执⾏器应根据不同果蔬果实的⽣物、机械特性及栽培⽅式,采取不同的专⽤机构以提⾼采摘的成功率并减⼩对果蔬的损伤为主要⽬标。
⼀般集成两项功能:①检测果实的位姿,为执⾏机构提供导航信息;②以适当⼒度夹持果实或果梗并剪切果柄,完成采摘动作。
在动作上通常包括获取果实和果实与植株分离两部分。
为了安全与⾼效的完成采摘动作,末端执⾏器还可能加⼊吸盘、推杆等附加机构以及各类传感器以完成准确采摘并减⼩损伤。
1.获取⽅式获取和分离果实是采摘机器⼈末端执⾏器必须实现的两⼤关键动作,即⾸先通过抓取、吸⼊、勾取等⼀定⽅式获取果实,再通过扭断、剪切等不同⽅法完成果实与果梗的分离。
从⽬前发表的⽂献来看,获取果实的⽅式主要归为⾮夹持类和夹持类两种。
分离果实与果梗的⽅式有传统的扭断、折断、拉断以及通过剪⼑或切⼑进⾏切断,还有新式的热切割⽅法等。
1.1.直接切断式这类末端执⾏器⼀般都是直接剪断果梗,由于其本⾝不能实现果实的回收,因此剪掉的果实直接落地或者落⼊事先放置的果箱中。
例如,⽇本开发的甜椒采摘机器⼈末端执⾏器、茄⼦采摘末端执⾏器、番茄采摘末端执⾏器、美国柑橘采摘末端执⾏器均为此类结构,如下图所⽰。
1甜椒采摘末端执⾏器2茄⼦采摘末端执⾏器3番茄采摘末端执⾏器这类末端执⾏器的结构更能较为简单,适⽤于植株冠层内枝叶较稀疏,且果实具有⼀定抗冲击能⼒的果蔬。
对于果梗较短的植株,往往造成⽆法剪切或碰上果实的现象,对于冠层空间⽐较复杂的植株,果实下落过程中很容易被碰上,并且下落的位置也不定,影响果实的回收。
简析农业机器人的应用近些年来,工业的快速发展推动了农业的发展。
诞生于美国的智能机器人技术也越来越受到重视,农业机器人得到了广泛的运用。
各个国家投入大量的资金研究机器人,机器人有效应用到农业上会对农业发展起到巨大的推动作用。
中国是一个农业大国,农业是国家经济发展的基础,农业的发展对我国的经济发展起着重要的作用。
机器人运用到我国的农业上将会推动我国农业的发展,可以大幅度提高生产效率,进而提高农业经济效益。
为此,深入研究农业机器人是很有必要的。
本文从机器人开发研究背景出发,总结国内外农业机器人的研究现状,探究农业机器人运用的领域,指出农业机器人应用存在的一些问题,并对农业机器人的发展进行了展望。
近年来,我国综合国力一直在增强,农业生产机械化进程也不断推进,农业生产效率显著提高。
但是伴随着可耕地的减少和人口数量的增加,社会对农业生产的深度要求也提高了很多,高效率、高智能化、低生产成本的现代化农业机械,改变了我们熟悉的农业生产模式,并已经成为当代农业生产不可或缺的生产资料。
高智能化的机器人与农业机械的结合,为新型农业生产开创了崭新的天地。
1 农业机器人的发展历程从20世纪中期开始,先后有很多国家开始推广机械化农业,一方面极大程度上促进了农业生产效率的提高,同时推动了整个社会的发展和经济的增长。
可是,伴随着社会的发展,传统农业机械开始满足不了现代农业的要求,一些特殊农业作业无法使用现有的机械设备。
且现代农业生产的深度也不断加深,传统农业机械的加工质量和加工细化程度已经不再符合当代农业的生产要求。
以前,人们在农业生产中往往是片面地追求产量和利润,而现在人们开始注重环境的保护和资源的循环利用以及农业的有机可循环发展模式。
科技的发展也为智能农业机器人的出现提供了技术支持,比如卫星定位系统可以准确定位,图像分解技术可以精细地识别,数控控制技术可以快速有效地实现各种操作等,各种科技成果的应用,成为了农业机器人开发和应用的有力保证。
国内外蔬菜嫁接机的研究现状蔬菜嫁接是一种常见的生物技术,通过将一个或多个植物品种的茎与另一个植物品种的根部相连接,在栽培中获得更好的生长性能和产量。
蔬菜嫁接机是一种专门用于嫁接操作的设备,通过使用这种机器,可以加快传统嫁接过程的速度和效果。
在国内,蔬菜嫁接机的研究和应用起步较晚。
早期,嫁接通常是采用手工进行,由于嫁接技术复杂且劳动强度大,效率低下,难以满足大规模蔬菜生产的需求。
因此,研发自动化嫁接机成为提高嫁接效率和质量的重要途径。
近年来,在国内外的研究中,蔬菜嫁接机的设计和开发取得了一些进展。
研究者们主要关注以下几个方面:首先,结构设计。
蔬菜嫁接机的外形和结构对于操作效果至关重要。
一些研究者通过改进嫁接机的结构,提高了操作的稳定性和准确性。
例如,一些研究者设计了多轴式机器人嫁接机,通过多个机械臂同时进行嫁接操作,大大提高了效率。
其次,控制系统。
蔬菜嫁接机的自动化程度取决于控制系统的设计和功能。
研究者们采用传感器和计算机视觉技术,实现对嫁接过程的智能监控和控制。
通过引入机器视觉和图像处理算法,可以自动检测嫁接点的位置,并实时调整机器的操作,提高嫁接的准确性和成功率。
此外,根系处理技术。
蔬菜嫁接的成功与否也与嫁接材料的根系处理有关。
一些研究者通过对根系进行预处理,如刺激生长、促进根系再生等方法,来增强嫁接材料与砧木的相容性和生长能力。
例如,研究者利用生物刺激剂和营养处理,提高了嫁接成功率和成活率。
最后,性能评估和优化。
蔬菜嫁接机的性能评估是提高机器操作效果的重要环节。
研究者们通过对嫁接机进行实地试验和数据分析,评估机器的嫁接效率和质量,并开展相关优化。
例如,通过改变嫁接机的工作参数,如嫁接速度、压力和温度等,可以进一步提高嫁接效率和成活率。
总之,国内外蔬菜嫁接机的研究现状主要集中在结构设计、控制系统、根系处理技术和性能评估等方面。
随着科技的不断进步,蔬菜嫁接机将会越来越智能化和高效化,为蔬菜产业的发展提供更好的技术支持。
果蔬采摘机器人离线编程及控制系统设计的开题报告一、选题背景及意义随着人口的不断增长和城市化进程的加速,农业生产逐渐面临着劳动力稀缺和成本高昂的问题。
同时,随着科技的不断发展,机器人技术也得到了突破性发展,为农业生产提供了新的机会。
果蔬采摘机器人可以在耕种、喷洒、排灌等方面提高效率,降低成本,特别是在果蔬采摘方面可以替代传统的劳动力采摘方式,提高采摘效率和品质。
然而,果蔬采摘机器人控制和编程系统的研究还处于初级阶段,需要继续深入探究。
该课题旨在研究果蔬采摘机器人的离线编程及控制系统的设计,为果蔬采摘机器人的实现和推广提供技术支持和保障。
二、研究内容和方法(一)研究内容1. 果蔬采摘机器人系统架构分析,包括机械、电气、控制等方面的分析。
2. 果蔬采摘机器人离线编程方法研究,包括基于CAD数据的离线编程方法、基于虚拟现实的离线编程方法等。
3. 离线编程系统设计,包括系统软硬件环境的设计和搭建,以及离线编程软件的开发和优化。
4. 控制系统设计,包括运动控制、视觉识别等方面的控制系统设计。
5. 系统集成与测试,包括对离线编程系统和控制系统的集成和测试。
(二)研究方法1.文献研究法:对果蔬采摘机器人的相关文献进行分析和整理。
2.案例研究法:对已有的果蔬采摘机器人进行案例研究分析,借鉴其优点并总结经验。
3.系统分析法:对果蔬采摘机器人系统进行分析,了解其结构和功能要求,为系统设计提供参考。
4.实验研究法:利用模拟环境和实际场景进行系统设计和测试。
三、预期成果及应用价值通过本研究,预期实现以下成果:1. 果蔬采摘机器人离线编程及控制系统的设计和开发。
2. 运动控制和视觉识别算法的研究和优化。
3. 系统集成和测试,说明系统的使用效果和可靠性。
4. 大幅提高果蔬采摘机器人的效率和质量,为果蔬生产提供更好的保障和支持。
5. 推动机器人技术在农业生产中的广泛应用。
四、工作计划及进度安排1. 第1-2个月:文献梳理、案例研究、需求分析。
嫁接机器人工作原理宝子们!今天咱来唠唠嫁接机器人这个超酷的家伙的工作原理,可有意思啦!咱先得知道啥是嫁接。
就好比啊,把一种植物的枝或者芽,接到另一种植物的茎或者根上,让它们像一家人似的长在一起。
这在以前呢,可都是靠果农伯伯或者花农叔叔阿姨们的巧手来完成的。
但是呢,这活儿可不容易,又得快又得准,就像做手术似的。
嫁接机器人就闪亮登场啦。
这个小机灵鬼啊,它得先认识要嫁接的植物材料。
就像我们人认人一样,它得能分得清哪个是砧木,哪个是接穗。
它有个小眼睛,其实就是传感器啦。
这个传感器就像个小侦探,能把植物的形状、大小、颜色这些信息都收集起来。
比如说,砧木的茎有多粗,接穗的芽有多饱满,它都能看得明明白白的。
然后呢,它就开始动手啦。
它有个小手臂,这个手臂可灵活了,就像咱们人的胳膊一样,能伸能缩,还能拐弯呢。
它会按照之前传感器收集到的信息,把接穗切得整整齐齐的。
这切的过程可讲究了,角度啊、长度啊,都得刚刚好。
就像我们切菜一样,要是切歪了,那可不行。
它切接穗的时候,就像是个小厨师在精心准备食材,每一刀都充满了精准的艺术感。
接着,对砧木也不能含糊。
它会在砧木上也切出一个合适的口子,这个口子和接穗就像是天生一对似的,得严丝合缝。
这时候啊,嫁接机器人就像个小媒婆,要把接穗和砧木完美地结合在一起。
它小心翼翼地把接穗插到砧木的切口中,那动作轻柔得就像在对待最宝贝的东西。
再之后呢,为了让它们能更好地长在一起,嫁接机器人还有个小秘密武器,那就是固定装置。
就像给它们俩系上一个小安全带一样,可能是用小夹子或者小绳子之类的东西,把接穗和砧木紧紧地固定住。
这样,在它们刚开始长在一起的时候,就不会乱动啦,就像小两口刚结婚,得互相扶持着站稳脚跟。
而且哦,这个嫁接机器人还很聪明呢。
它能根据不同的植物种类,调整自己的嫁接方式。
比如说嫁接苹果和嫁接西瓜,那肯定是不太一样的。
它就像个经验丰富的老园丁,知道每种植物的小脾气,然后因材施教。
这个嫁接机器人啊,就像是植物界的小魔法师。
农业信息系统工程结课论文课程名称:农业信息系统工程姓名:吴海洋学号:S1*******院系专业: 工学院农业机械化工程二班学生类别:统招硕士研究生交论文时间:2012年01月04日蔬菜嫁接机器人系统分析(吴海洋工学院农业机械化工程S1*******)摘要:以系统工程思想为指导,对国内外蔬菜嫁接机器人的发展进行了分析对比,以穴盘西红柿苗嫁接机器人为例介绍了蔬菜嫁接机器人的系统组成及其结构关系,同时详细分析了蔬菜嫁接机器人与经济社会的反馈作用机制等,最后阐明了蔬菜嫁接机器人系统发展过程中的基本特征。
关键词:蔬菜嫁接;机器人;系统;关系蔬菜嫁接机器人研究是农业生产发展过程中客观存在的基本现象,是现代化农业机械化的重要内容。
蔬菜嫁接机器人作为农业机械化结构中的重要组成部分,是工业技术与农业技术相结合的产物,是一个边界模糊、因素众多、关系复杂的系统。
应用系统工程的方法对蔬菜嫁接机器人进行系统分析,对于制订蔬菜嫁接机器人发展战略、措施政策和认识制约蔬菜嫁接机器人发展的诸多因素,是不可缺少的内容之一。
1.蔬菜嫁接机器人的发展与组成结构1.1蔬菜嫁接机器人的发展在我国,随着人口的急剧增长和人民生活水平的不断提高,对蔬菜的需求量越来越大,对蔬菜质量的要求也越来越高。
据有关部门统计,2001年以来,各地在调整产业结构时,都不同程度地扩大了蔬菜种植面积。
传统的栽培技术由于受季节性影响很大,蔬菜供应旺季堆积如山,供过于求;淡季则供不应求,严重缺菜。
保护地栽培技术的发展有效地解决了这一矛盾。
温室、大棚等保护地蔬菜栽培以瓜类和茄果类蔬菜最为普遍。
在设施栽培条件下,果类和茄果类蔬菜连作障碍问题日益突出。
连作会使土壤环境恶化,土壤中病虫种类和数量逐茬增多,导致蔬菜生长势头减弱、产量减少、品质下降。
实践证明:解决这一问题最有效的方法是采用嫁接育苗技术。
目前,嫁接栽培已经是黄瓜、茄子、西红柿等果类、茄果类蔬菜栽培实现稳产、高产、优质的重要措施。
人工嫁接操作,技术要求精细,费时、费工、费力、工作效率低。
由机械嫁接取代人工嫁接就变得十分必要。
实现传统农业向现代农业的转变是世界农业发展的必然规律,目前中国正处于从传统农业向现代农业转变的关键时期。
农业的现代化离不开农业机械化,农业机械化则是农业现代化的中心环节。
推进农业机械化进程,对促进新农村建设以及农业与非农业的协调发展,构建和谐社会,具有特别重要的意义。
而蔬菜嫁接机器人是农业机械化发展中的重要内容。
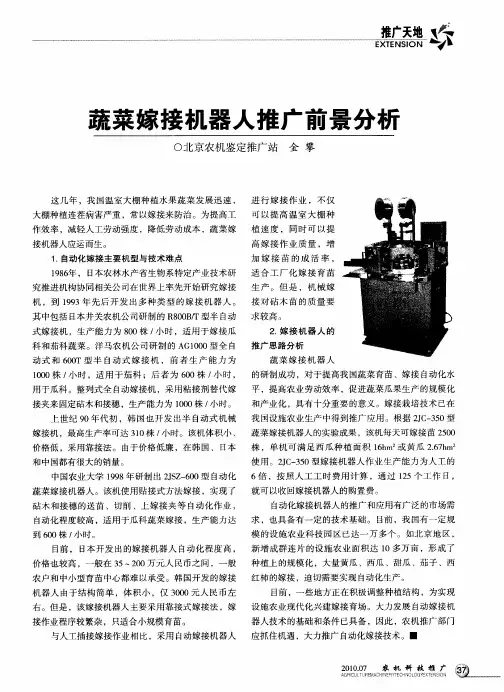
蔬菜嫁接机器人技术,是近年在国际上出现的一种集机械、自动控制与园艺技术于一体的高新技术,它可在极短的时间内,把蔬菜苗茎杆直径为几毫米的砧木、穗木的切口嫁接为一体,使蔬菜嫁接速度大幅度提高;同时由于砧木、穗木接合迅速,避免了切口长时间氧化和苗内液体的流失,从而又可大大提高嫁接成活率。
因此,蔬菜嫁接机器人技术被称为蔬菜嫁接育苗的一场革命。
1.1.1 国外蔬菜嫁接机器人发展经验日本西瓜的100%,黄瓜的90%,茄子的96%都靠嫁接栽培,每年大约嫁接十多亿棵。
从1986年起日本开始了对蔬菜嫁接机器人的研究,以日本“生物系特定产业技术研究推进机构”为主,一些大的农业机械制造商参加了研究开发,其成果已开始在一些农协的育苗中心使用。
由于看到了蔬菜嫁接自动化及蔬菜嫁接机器人技术在蔬菜生产上的广阔前景,日本一些实力雄厚的厂家如YANMA、MITSUBISHI 等也竞相研究开发自己的蔬菜嫁接机器人,嫁接对象涉及西瓜、黄瓜、西红柿等。
总体来讲,日本研制开发的蔬菜嫁接机器人有较高的自动化水平,但是,机器体积庞大,结构复杂,价格昂贵。
90年代初,韩国也开始对自动化蔬菜嫁接技术进行研究,但其研究开发的技术,只是完成部分嫁接作业的机械操作,自动化水平较低,速度慢,而且对砧木、穗木苗的粗细程度有较严格的要求。
在蔬菜嫁接育苗配套技术方面,日本、韩国已生产出专门用于嫁接苗的育苗营养钵盘。
在欧洲,农业发达国家如意大利、法国等,蔬菜的嫁接育苗相当普遍,大规模的工厂化育苗中心全年向用户提供嫁接苗。
由于这些国家尚未有自己的蔬菜嫁接机器人,所以嫁接作业,一部分仍采用手工嫁接,一部分采用日本的嫁接机器人进行作业。
1.1.2 我国蔬菜嫁接机器人现状在中国,农业机器人方面的研究始于20世纪90年代中期,相对于发达国家起步较晚,但是发展很快,很多院校、研究所都在进行农业机器人和智能农业机械相关的研究。
1993年由中国农业大学张铁中教授率先对蔬菜的机械嫁接技术进行了研究,并在1996年通过对国内传统手工嫁接方法与国外自动嫁接技术的分析对比上提出了蔬菜自动嫁接方案,并开发出了应用插接法进行蔬菜嫁接的嫁接装置。
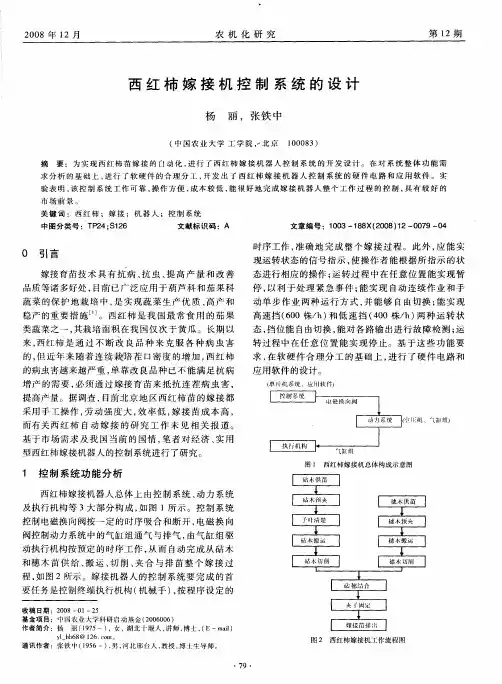
1998年张铁中教授等在以前研究的基础上又成功研制开发出了2JSZ-600型蔬菜自动嫁接机,该机采用PLC控制,实现了砧木和穗木的抓取、切削、接合、固定、排苗等嫁接作业的自动化。
该机在1998年通过了技术鉴定,填补了国内空白,并获得了国家发明专利。
此种嫁接机结构设计新颖、操作简单,对砧木、穗木的适应性强,嫁接性能可靠,各项技术指标都到达了国际先进水平。
山东潍坊市农业机械研究所研制的SJZ-1型蔬菜嫁接机采用靠接法,最高工作效率为310株每小时。
该机的工作原理和外形类似于韩国的自动嫁接机。
1.2蔬菜嫁接机器人的组成结构蔬菜嫁接机器人技术,是一种集机械、自动控制与园艺技术于一体的高新技术。
对于不同种类蔬菜的嫁接,由于植物性状、嫁接法的选择不尽相同,嫁接机器人也复杂多样。
下面就一种穴盘西红柿苗嫁接机器人为例进行分析。
图1.穴盘西红柿苗嫁接机器人的工作流程图穴盘西红柿苗嫁接机器人的结构如下图:电动式执行原件执行机构气动原件气缸、气爪、大口机械夹....传送带装置传送带、主轴、联轴器.....传动装置机构穴电机的选择输出负载扭矩、电机转速.....盘西红柿定位杆、滑道、大口机械夹.....苗嫁接机砧木粗切削装置限位板、隔板、刀架....器切削机构人砧木精切削装置刀、刀架、安装法兰.....插针器结构内管、外壳、内芯....插针装置机构出针器结构限位槽、出针槽.....穗木横向转移手爪、支板、滚轮........图2. 穴盘西红柿苗嫁接机器人的结构2.蔬菜嫁接机器人与经济社会的作用关系2.1.制约蔬菜嫁接机器人发展的因素在蔬菜嫁接机器人的发展过程中,始终存在着众多因素的制约与推动,这些影响因素有自然的、社会的、经济的、技术的,还有政策等等,综合说来有四个方面。
首先,机电工程技术和经济发展水平,使蔬菜嫁接机器人在机器、能源和资金等物质、技术条件方面具备了实现的可能性。
其次,蔬菜嫁接技术的进步和劳动者素质的提高,使蔬菜嫁接机器人具有良好的使用环境。
第三,社会机制(指生产关系和经济体制)有容纳和刺激蔬菜嫁接机器人发展的条件。
第四,农村产业结构变化和农业生产的发展,农民认为使用机器比使用人畜力更经济、更有效,出现了机械代替人畜力作业的客观需求,它是蔬菜嫁接机器人发展的内在动因。
2.2. 蔬菜嫁接机器人发展的功能蔬菜嫁接机器人并不仅仅被动地接受自然因素和社会经济因素的制约,作为社会生产力的一部分,在与其环境条件相互协调时,至少有以下几方面的功能:一是增强蔬菜生产技术,抢农时、抗病虫害、保产。
二是降低蔬菜嫁接作业成本,提高劳动生产率,有助于实现蔬菜生产规模经济效益,提高单产与质量。
三是直接构成农村某些新兴产业的技术基础,增加收入,提高投入产出比,并提供新的就业机会。
四是促进剩余劳力不断转移,为城乡二、三产业和林、牧、副、渔业综合发展创造新的条件。
五是降低劳动强度,改善劳动环境。
2.3.蔬菜嫁接机器人与经济社会的作用机制蔬菜嫁接机器人的发展一方面支持蔬菜产业结构的调整与合理配置,另一方面又受到了有关经济社会因素的制约,这就反映了技术进步与经济社会发展之间的正反馈作用机制。
嫁接机器人与经济社会的反馈作用关系具体见图3所示。
图3.蔬菜嫁接机器人系统因素作用关系图3.蔬菜嫁接机器人发展的基本特征蔬菜嫁接机器人作为大规模蔬菜生产提高生产率的手段,既离不开产业结构变革的推动,又担负着支持产业结构调整的保证任务。
因此蔬菜嫁接机器人的发展具有以下基本特征。
第一,发展蔬菜嫁接机器人属于发展农业机械化的一部分,农村经济的发展是农业机械化发展的前提,农业机械化的发展需以发展农村经济为中心,以提高经济效益、解放劳动力为宗旨。
第二,蔬菜嫁接机器人的目标是以尽可能小的物化劳动耗费换取活劳动的更大节约,并保证配合各项农业技术措施的实施,实现蔬菜的增产增收。
第三,劳动力是农村经济与蔬菜嫁接机器人协调发展的桥梁。
在一定的蔬菜种植水平下,农业劳动力占劳动力的比例越低,要求的农业劳动生产率越高和蔬菜嫁接的机械化程度越高。
第四,随着蔬菜嫁接机械化程度的提高,机器人性能、劳动者素质、专业化程度和土地经营规模必须与之相适应。
蔬菜嫁接机器人的配备必须建立在技术进步的基础之上。
第五,在当前农村政策和发展形势的前提下,发展蔬菜嫁接机器人应该做到各层次分工合作,引导农民自觉地改变落后的生产方式,从而提高农村生产力。
第六,蔬菜嫁接机器人的发展有利于劳动力转移,且使剩余劳动力在农村内部进行一定的消化。
蔬菜嫁接机器人从减少活劳动和增加产量两个方面提高蔬菜种植的生产率,所节约出来的劳动力则可以向农村生产的广度和深度进军,或从事其它劳动来增加物质财富和精神财富,从而体现蔬菜嫁接机器人在发展农村经济中的根本作用。
蔬菜嫁接机器人的发展是一个以先进的机械化生产方式逐渐代替传统的手工生产作业的过程,其发展进程受到社会、经济、技术、资源、环境等众多因素的影响。
蔬菜嫁接机器人的发展关系到我国农业现代化进程的步伐,关系到和谐社会的构建,因此在当前国家着力解决“三农”问题和大力推进社会主义新农村建设的背景下,借鉴国外蔬菜嫁接机器人发展经验,认真分析我国蔬菜嫁接机器人系统,对提出我国农业机械化制度创新的建议有重要意义,有利于我国农业机械化的快速发展,可为农业现代化和社会主义新农村建设做出贡献。
参考文献:[l]王福林. 农业系统工程. 北京:中国农业出版社,2006[2]陈文贵. 穴盘西红柿苗嫁接机器人的研究. 中国农业大学硕士研究生论文,2006[3]刘超. 农业机械化的系统分析. 江西农业大学学报.2002,(5):707-710[4]杨丽. 西红柿自动嫁接机机构设计与控制系统研究. 中国农业大学硕士研究生论文,2002。