文献综述_基于PLC的皮带运输的控制系统设计
- 格式:doc
- 大小:34.00 KB
- 文档页数:9
基于PLC的皮带运输机控制装置的设计基于PLC的皮带运输机控制装置的设计一、引言随着工业化进程的发展,传统的手动控制方式已无法满足工业生产的要求。
自动化控制系统的广泛应用,有效提高了生产效率和质量。
皮带运输机作为一种常用的物料输送装置,在物流和生产领域有着广泛的应用。
为了提高皮带运输机的运输效率和安全性,本文基于PLC控制技术,设计了一种皮带运输机控制装置。
二、皮带运输机的原理及控制需求皮带运输机主要由电机、减速器、皮带以及支撑结构等部分组成。
其原理是通过电机驱动皮带带动物料进行运输。
在控制方面,皮带运输机需要具备下列功能:1. 启停控制:能够实现对电机的启停控制,确保运输机在需要时能够正常启动,不需要时能够及时停止。
2. 速度调节控制:能够调节电机转速,以满足不同工况下的输送要求。
3. 位置控制:能够准确控制皮带的位置,确保物料在传送过程中不偏移。
4. 故障保护控制:能够监测皮带运输机的工作状态,一旦发生异常情况及时停机,保护设备和人员安全。
三、基于PLC的皮带运输机控制装置设计基于上述控制需求,本文采用PLC作为控制核心,设计了一种基于PLC的皮带运输机控制装置。
1. PLC的选择本设计选用了一款功能强大且可编程性高的PLC,具备多个输入输出接口,并且支持多种通信协议和编程语言。
2. 电机启停控制通过PLC的输出接口与皮带运输机的电机进行连接,采用直接开关控制电机的启停。
PLC通过接收启动信号,控制输出接口输出高电平信号给电机,实现电机的启动;同时,通过接收停止信号,控制输出接口输出低电平信号给电机,实现电机的停止。
3. 速度调节控制通过PLC的模拟量输出接口,与电机的调速设备(如变频器)相连接。
PLC通过接收速度调节信号,通过模拟量输出接口输出相应的模拟量信号给电机的调速设备,实现电机的转速调节。
4. 位置控制通过PLC的数字量输出接口与皮带运输机的位置控制装置相连接。
PLC通过接收位置控制信号,控制输出接口给位置控制装置发送相应的数字量信号,实现对皮带位置的控制。
目录引言: ............................................................................................................. 错误!未定义书签。
1 皮带传输机集中控制系统的结构及工作过程 ............................................................... - 3 -1.1 皮带传输机的结构 ................................................................................................. - 3 -1.2 皮带运输机的电气控制要求 ................................................................................. - 3 -1.3 皮带运输机的总体方案确定 ................................................................................. - 4 -2 控制系统的硬件电路设计 ............................................................................................... - 5 -2.1 PLC选型及I/O表的分配 ..................................................................................... - 5 -2.2 PLC外围硬件电路的设计与硬件电路图............................................................. - 6 -2.2.1 PLC外围硬件电路图................................................................................... - 6 -2.2.2 硬件电路主电路图及说明 ........................................................................... - 7 -2.3 硬件电路的接线要求 ............................................................................................. - 8 -3 控制系统的软件设计 ....................................................................................................... - 8 -3.1 软件设计思路 ......................................................................................................... - 8 -3.2 程序流程图与梯形图及说明 ................................................................................. - 8 -4 抗干扰的设计 ................................................................................................................. - 11 -4.1 设备选型 ............................................................................................................... - 11 -4.2 综合抗干扰设计 ................................................................................................... - 11 -5 系统调试 ......................................................................................................................... - 11 - 总结与谢辞 ........................................................................................................................... - 12 - 参考文献 ............................................................................................................................... - 13 -PLC用于皮带运输机的集中控制设计引言:随着国民经济的快速发展,煤矿、冶金、钢铁、化工、制药、仓储、电厂等方面对于皮带输送机有了许多高新的要求。
基于plc的皮带运输机控制系统设计毕业设计近年来,工业自动化技术在各行业中广泛应用,其中皮带运输机控制系统也越来越受到注重。
本文将针对这一问题进行探讨,重点介绍基于PLC的皮带运输机控制系统设计方案。
一、系统设计基础皮带运输机是一种广泛应用于工厂、码头、矿山等场所的物料输送设备。
其工作原理是将被输送的物品放到皮带上,通过电机带动皮带转动,实现物品的运输。
控制皮带运输机的核心是设计一个控制系统,使得皮带运输机能够高效、稳定地工作。
二、设计要素1. 控制器的选型PLC是工控系统中较为常见的一种控制器,其优点是稳定性高、易于编程、可扩展性强。
在控制系统中,PLC选型要考虑运输机的规模、负荷、环境等因素,使其能够满足对控制精度、反应速度和实时性等方面的要求。
2. 控制系统的组成控制系统主要由传感器、执行器、中央处理器(CPU)、输入/输出模块(I/O模块)等组成。
传感器负责检测物品的位置、速度、重量等信息,执行器则完成控制信号的输出。
CPU负责控制整个系统的运行,进行指令的处理和数据的传输,I/O模块则连接所有设备,进行信号的输入和输出。
3. 控制系统的程序设计在设计控制系统的程序时,应根据实际情况编写适当的控制程序,例如确定启动、停止、加速、减速的条件和时机;设计皮带运输的速率、位置控制程序;编写报警程序,实现故障检测和报警。
4. 系统的安全设计在皮带运输机的控制系统中,安全设计是至关重要的一个环节。
如在触及限位开关的情况下,皮带运输机应该立即停止,以保证设备不会出现安全隐患。
三、总结基于PLC的皮带运输机控制系统设计,是一个多方面的工程,需要综合考虑机械、电气、控制等多个方面的因素。
在设计过程中,应该注重各项技术设计方案的协调与整合,以实现控制系统的完美运转。
摘要PLC即可编程控制器(Programmable logic Controller),是指以计算机技术为基础的新型工业控制装置。
在1987年国际电工委员会(International Electrical Committee)颁布的PLC标准草案中对PLC做了如下定义:PLC是一种专门为在工业环境下应用而设计的数字运算操作的电子装置。
它采用可以编制程序的存储器,用来在其内部存储执行逻辑运算、顺序运算、计时、计数和算术运算等操作的指令,并能通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。
PLC及其有关的外围设备都应该按易于与工业控制系统形成一个整体,易于扩展其功能的原则而设计。
20世纪80年代初,可编程控制器在先进工业国家中已获得广泛应用。
这个时期可编程控制器发展的特点是大规模、高速度、高性能、产品系列化。
这个阶段的另一个特点是世界上生产可编程控制器的国家日益增多,产量日益上升。
这标志着可编程控制器已步入成熟阶段。
20世纪末期,可编程控制器的发展特点是更加适应于现代工业的需要。
从控制规模上来说,这个时期发展了大型机和超小型机;从控制能力上来说,诞生了各种各样的特殊功能单元,用于压力、温度、转速、位移等各式各样的控制场合;从产品的配套能力来说,生产了各种人机界面单元、通信单元,使应用可编程控制器的工业控制设备的配套更加容易。
目前,可编程控制器在机械制造、石油化工、冶金钢铁、汽车、轻工业等领域的应用都得到了长足的发展。
本次设计选择了用PLC来控制皮带机的整个运行过程,PLC的运用使得系统的电路变得简明清楚,而且十分便于日后的运行维护,那么PLC究竟是什么呢?PLC在皮带机上面的应用,使的皮带机的控制机构变得简单,运行更加可靠,同时维修起来也是十分的简单方便。
目录第1章运输带控制发展 (3)1.1运输带在生产中的应用 (3)1.2PLC控制及发展 (3)1.3控制系统人机界面作用及发展 (4)第二章系统硬件设计 (5)2.1设计方案 (5)2.2控制电路设计 (5)2.3主电路设计 (6)第三章系统软件设计 (7)3.1PLC程序设计 (7)3.2触摸屏画面组态 (13)第四章系统调试与运行操作 (10)4.1调试过程 (16)4.2运行操作 (16)参考文献 (18)第1章运输带控制发展1.1运输带在生产中的应用目前PLC已经渗透到生活的各个方面,尤其是自动化控制。
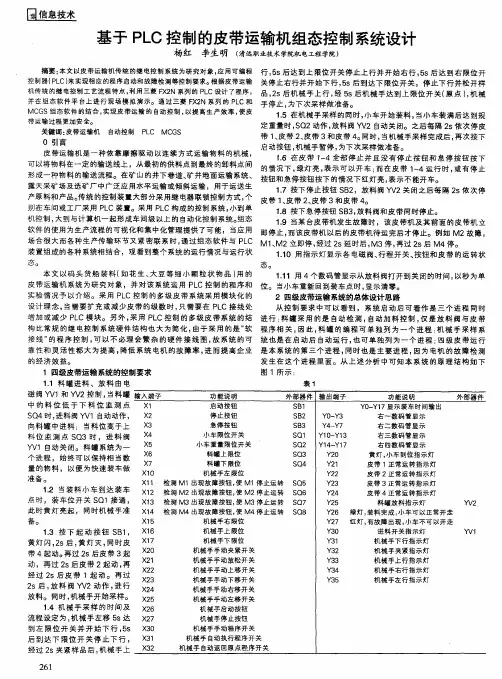
基于PLC控制皮带运输机的设计摘要:皮带运输机作为一种常见的连续运输物料的机械,广泛应用在工业生产,尤其是矿业生产中。
在皮带运输机运行过程中,可能会出现各种故障——如跑偏、撕裂、堆煤、打滑和过热等,这些故障可能给实际生产带来各种经济上、甚至人身安全上的损失,小的故障也可能影响生产的连续性。
因此及时发现这些故障十分重要。
本文研究设计了基于PLC的皮带运输机控制系统,对该控制系统的功能进行了详细的分析。
关键词:皮带运输机;PLC;控制系统1皮带运输机控制系统控制功能(1)顺序启停:按照物流方向,系统从下游皮带机开始自动顺序启动,而顺序停止则是从上游皮带机开始。
启动和停止过程都要求有一定的延时时间。
启动延时的时间,与皮带机的驱动电机的容量有关。
一般来说,电机的容量越大,启动延时的时间越长。
根据运行经验,运输机的启动延时应达到如下范围:32kw的皮带运输机——不小于3s;75kw以上皮带运输机——不小于5s。
停止延时主要是为了使皮带运输系统在停止时物料运输完毕,完成本次运料的工作,防止皮带机上存料存煤,尽量保证皮带机空载停机。
停止延时时间设置和皮带机的运行速度和运输长度有关。
根据上文皮带机的相关技术参数,设置停止延时时间15s。
(2)手动启停:在皮带运输系统使用期间,难免会发生各种故障需要进行检修和测试。
此时,要使运输系统中的单台皮带可以独自正转或反转而不联锁其他皮带机动作。
设置皮带运输系统工作模式选择按钮,即手动启停模式选择按扭,选择手动模式后,可以就地控制单台皮带运输机的启动和停止。
再设电动机正转和反转选择按钮,以使皮带机正向反向均可运转。
(3)故障监测与报警:在系统运行过程中,若某台皮带机发生故障,则发生故障的皮带机和其上游的皮带机均立刻停机,并发出报警信号、相应故障灯闪烁,其下流的皮带机15s后停机。
若发生火灾(烟雾报警),则全线皮带机均立即停机,发出声光报警信号,且启动洒水装置。
2控制系统硬件选型与设计(1)传感器选型传感器是首先感受被测量物体的信息,然后把接收到的信息用一定方式转变成电信号或者其他形式的信息传输出去,来满足信息的传输、处理、显示、记录、存储和控制等要求的一种检测装置。
《基于PLC的矿用皮带运输的控制系统》文献综述容摘要皮带运输机是一种有牵引件的连续运输设备,广泛应用于矿产开采、金属冶炼、化工、铸造等行业的生产线和输送线以及港口的生产部门。
主要用来运送物料,根据输送工艺的要求,可以单台输送,也可以多台组合输送,或者和其它输送设备组成水平或倾斜的输送系统。
煤矿的输送系统对保证矿井正常生产起着极其重要的作用。
本设计主要叙述了利用先进的PLC技术对煤矿企业皮带机系统进行技术改造方案,并且叙述了皮带机的基本原理、皮带机集中控制系统设计步骤。
PLC是一种专门在工业环境下应用而设计的数字运算操作的电子设备。
它采用可编程存储器,用来在其部存储执行逻辑运算、顺序运算、计时、计数和算数运算等操作的指令,并能在其部存储进行数字或模拟式的输入和输出,控制各种类型的机械或生产过程。
关键词:煤矿;皮带运输机;集中控制系统;PLC国外皮带运输机的研究现状国外在皮带运输机动态分析研究方面发展的比较早,动态分析理论与研制的软件已经基本能够满足当前的发展需求;而我国则比较晚,跟国外相比,还存在比较大的差距,尤其是动态分析的软件部分。
为了尽快弥补差距,赶超世界先进水平,有必要研究跟分析当今国外皮带运输机的动态分析软件。
目前,美国、法国意大利等发达国家在动态分析研究方面,已经达到了国际领先地位。
我国生产制造的上运式带式输送机的种类较多。
在“八五”时期,通过国家一条龙“日产万吨综采设备”项目实施,皮带运输机的技术水平有了很大的提高,煤矿井下用大功率、长距离带式输送机的关键技术研究和新产品开发都取得了很大的进步。
如大倾角、长距离带式输送机成套设备、高产高效工作面顺槽可伸缩带式输送机等都填补了国空白,并对带式输送机的主要元部件进行了理论研究跟产品的开发,研制成功了多种软启动和制动装置以及以PLC为核心的可编程电控装置,驱动系统采用可调速型液力耦合器和行星齿轮减速器。
皮带运输机的集中控制系统的发展及存在问题在煤矿中,煤流的输送大部分在几百米到十几公里之间,因此它的运输系统要有多台皮带输送机、给煤机、煤仓等组成,协调配合完成长距离运输任务。
基于某PLC的皮带运输机电器控制系统设计XXXX职业技术学院学生毕业设计(毕业论文)系别:机电工程学院专业:机电一体化班级:机电XXX学生姓名:学生学号:设计(论文)题目:皮带运输机电器控制系统设计指导教师:设计地点:XXXX职业技术学院起迄日期:2013.09.08-2013.11.12毕业设计(论文)任务书专业机电一体化班级机电XXX一、课题名称:皮带运输机电器控制系统设计二、主要技术指标:1.延时开关延时时间为5s,使皮带运输机能够按间隔5s时间相继运行,间隔5s相继停止2.三菱FX2N PLC程序的设计,使皮带运输机能够自动循环的运行3.电路及电路保护的设计,使皮带运输机能够防止短路、过载等危险,安全运行三、工作容和要求:1.了解市场皮带运输机的优缺点,明确设计方向及要点2.电路及保护电路的设计3.PLC程序设计4.皮带运输机电器系统的原理说明四、主要参考文献:1.王成福.可编程序控制器原理及应用[M].:机械工业,20062.景学.可编程序控制器应用系统设计及方法[M].:电子工业,19953.新华.电工技术与可编程序控制器实践[M].:机械工业,20024.余雷声.电气控制与PLC应用[M].:机械工业,20015.三菱微型可编程控制器编程手册(手册) 2000年学生(签名)年月日指导教师(签名)年月日教研室主任(签名)年月日系主任(签名)年月日毕业设计(论文)开题报告目录摘要 (1)0.绪论 (1)1.皮带运输机的研究与设计 (1) 1.1 简介 (1)1.2 设计的容 (2)1.3 设计的要求 (2)2.元器件的选择 (3)2.1 主元器件的选择 (3)2.2 电路保护元器件的选择 (4)3. PLC程序的设计 (7)3.1 PLC的简介 (7)3.2 I/O口的选择 (9)3.3 PLC程序的设计 (9)4.电路的设计 (10)4.1 电路保护的设计 (10)4.2 电路的设计 (11)5.系统工作原理说明书 (12)结论与展望 (12)致谢信 (12)参考文献 (13)皮带运输机电器控制系统设计摘要:本设计是设计一种用于皮带运输机的PLC电气控制装置,其中使用了交流接触器、熔断器和热继电器等电气元件,在控制电路上加强了保护,增强了控制系统的安全性和便捷性。
基于plc的皮带运输控制系统毕业设计一、选题背景皮带运输控制系统是工业自动化中常用的一种控制系统,它可以实现对物料在生产过程中的运输和流程的自动化控制。
随着工业自动化技术的不断发展,越来越多的企业开始采用皮带运输控制系统来提高生产效率和产品质量。
本文将介绍基于PLC的皮带运输控制系统设计方案,包括系统架构、硬件设计、软件设计等内容。
二、系统架构皮带运输控制系统主要由以下几个部分组成:1. 传感器模块:包括温度传感器、压力传感器等,用于检测物料在运输过程中的各种参数。
2. PLC控制模块:负责接收传感器模块采集到的数据,并根据预设的逻辑进行处理和判断,从而实现对皮带运输过程中各个环节的自动化控制。
3. 人机界面模块:提供给操作员一个直观、友好的界面,用于监视和调整整个系统的工作状态。
4. 通信模块:负责与其他设备进行通信,如与上位机通信以实现远程监测和控制。
三、硬件设计1. 传感器模块:根据需要选择不同类型的传感器,如温度传感器、压力传感器等,并将它们连接到PLC的输入口。
2. PLC控制模块:选择适合系统需求的PLC型号,并根据系统架构设计PLC程序,实现对皮带运输过程中各个环节的自动化控制。
3. 人机界面模块:选择适合系统需求的触摸屏或显示屏,并通过编程实现与PLC之间的通信,以实现对整个系统的监视和调整。
4. 通信模块:选择适合系统需求的通信设备,如RS232、RS485等,并通过编程实现与上位机之间的通信,以实现远程监测和控制。
四、软件设计1. PLC程序设计:根据系统架构设计PLC程序,实现对皮带运输过程中各个环节的自动化控制。
具体包括传感器数据采集、数据处理和判断、输出控制信号等功能。
2. 人机界面程序设计:通过编程实现与PLC之间的通信,以实现对整个系统的监视和调整。
具体包括显示当前工作状态、设定参数等功能。
3. 上位机程序设计:通过编程实现与通信模块之间的通信,以实现远程监测和控制。
基于PLC自动配料皮带运输机控制系统的设计摘要在现代化的工业生产中常常需要对物料进行加工、搬运,如果这些繁杂的工作由人工完成的话不但效率低,而且劳动强度大,不适合现代化的生产需要。
本文主要对基于PLC自动配料皮带运输机控制系统进行了详细的研究,该系统有两大部分构成:自动配料装置及皮带运输机控制系统。
该控制系统具有精度高、成本低、抗干扰能力强、故障率低、操作维护简单等特点,具有良好的应用价值,在建材、化工、食品机械、钢铁、冶金、煤矿等工业生产中广泛使用。
本次设计主要的内容:采用三菱FX2N系列PLC实现控制系统的设计,着重从带式运输机,液体混合装置系统两个方面深入研究,确定其控制要求,明确PLC 的机型的选择,确定I/O地址的分配,设计I/O接线图、控制流程图及梯形图,深入理解PLC的编程方法,按照控制要求对自动配料皮带运输机系统进行编程。
关键字:PLC,自动配料皮带运输机,程序,设计!!所有下载了本文的注意:本论文附有CAD图纸和完整版最终设计,凡下载了本文的读者请留下你的联系方式(QQ邮箱),或加我百度用户名QQ,我把图纸发给你。
最后,希望此文能够帮到你!PLC-BASED AUTOMATIC CONTROL SYSTEM FORBELT CONVEYOR DESIGNABSTRACTIn modern industrial production is often a need for materials for processing, handling, if the complexity of the work completed by the manual, then not only inefficient, but also labor-intensive, not suitable for modern production. In this paper, PLC-based automatic control system for belt conveyor carried out a detailed study, which consisted of two major systems: Automatic batching plant and control system for belt conveyor. The control system has high accuracy, low cost, anti-interference ability, low failure rate, simple operation and maintenance, has a good application value, In building materials, chemical industry, food machinery, iron and steel, metallurgy, coal and other widely used in industrial production.The main design elements: the use of Mitsubishi FX2N Series PLC control system design, focusing on transport belt, liquid mixing device-depth study of two aspects of the system to determine control requirements, the model explicitly the choice of PLC, determine the I / O address allocation, the design of I / O wiring diagram, control flow chart and the ladder, in-depth understanding of PLC programming method, in accordance with the control requirements of the transport belt automatic programming system.KEY WORDS: PLC, automatic transport belt ingredients, program, design目录前言 (1)第1章可编程序控制器概述 (2)1.1可编程序控制器的产生和发展 (2)1.2可编程控制器的基本组成和工作原理 (6)1.2.1 PLC的基本组成 (6)1.2.2 PLC的工作原理 (9)1.3可编程序控制器的特点 (11)第2章三菱FX2N系列可编程控制器简介 (13)2.1 FX2N系列PLC的结构特点 (13)2.2 FX2N系列PLC的基本组成 (14)2.3 FX2N系列可编程控制器内部元件及功能 (14)第3章应用PLC实现控制系统的设计 (19)3.1选题依据 (19)3.2方案研究与选择 (19)3.3结构设计及控制要求 (21)第4章系统的总体设计 (24)4.1 PLC机型的选择及外部接线图 (24)4.2 I/O设备及I/O编号的分配 (24)4.3顺序功能图的设计 (25)4.4梯形图的设计及程序分析 (26)结论 (30)谢辞 (31)参考文献 (32)附录 (33)外文资料翻译 (35)前言PLC目前已广泛应用于工业生产的自动化控制领域,无论是从国外引进的自动化生产线,还是自行设计的自动控制系统,都普遍采用了PLC控制。
皮带运输机PLC控制系统设计一、系统架构设计1.传感器部分:安装在皮带运输机上的传感器可以包括运输速度传感器、物料流量传感器和皮带张力传感器等。
这些传感器能够实时采集与运输相关的参数信息,提供给PLC控制器进行处理。
2.PLC控制器:选择适合的PLC控制器,根据实际要求进行编程,实现对传感器数据的采集和处理,并根据预先设定的参数进行判定,输出相应的控制信号。
3.控制执行部分:根据PLC控制器输出的控制信号,对皮带运输机的运行进行控制。
常见的控制方式有启动、停止、速度调节、转向等。
二、PLC编程设计1.采集和处理:PLC控制器根据传感器采集的数据,对其进行处理和分析。
例如,可以通过计算连续三次数据平均值,减小因数据波动而造成的影响。
2.状态判断:根据传感器采集的数据以及预设的参数,对皮带运输机的状态进行判断。
例如,可以通过物料流量传感器判断物料是否充足,通过皮带张力传感器判断皮带是否松弛等。
3.控制输出:根据状态判断的结果和预设的控制逻辑,PLC控制器输出相应的控制信号。
例如,当物料流量不足时,PLC控制器可以输出启动信号,使皮带运输机开始运行。
三、具体功能设计1.启动和停止控制:根据传感器采集的物料流量和皮带张力等信息,PLC控制器可以自动判断何时启动或停止皮带运输机。
当物料流量低于设定值时,PLC控制器输出启动信号,使皮带运输机开始运行;当物料流量达到设定值或超过设定值时,PLC控制器输出停止信号,使皮带运输机停止运行。
2.运行速度控制:在运输过程中,根据物料的性质和工艺要求,需要调节皮带运输机的运行速度。
PLC控制器可以根据传感器采集的参数信息,自动调节皮带运输机的运行速度,以实现最佳的运输效果。
3.报警和故障诊断:根据传感器采集的数据和PLC编程设计,PLC控制器可以实时监测皮带运输机的运行状态,当出现异常情况或故障时,及时进行报警,并进行相应的故障诊断和处理。
四、安全设计与人机界面1.安全设计:在PLC控制系统设计中,安全是一个重要的考虑因素。
摘要皮带输送机在许多企业中占有很重要的地位,但其控制单元种类繁多,都存在着性能和功能的差异。
传统继电器控制的皮带传输机存在电路复杂、可靠性差、故障诊断与排除困难等缺点,为了取得企业的良好的经济效益和社会经济效益,提出了采用实用性强、操作方便的PLC梯形图(LADDER DIAGRAM)编程语言对皮带输送机控制系统进行设计。
全文采用了欧姆龙公司的C系列可编程控制器在四段皮带输送机控制系统中的应用,给出了PLC控制皮带输送机系统的硬件组成和软件设计,其中包括PLC 选型、I/O地址分配、I/O端子接线、程序设计和控制原理。
该设计大大提高了设备的可靠性,减少了故障率,取得了成功。
关键词:PLC(CJ1M);梯形图;皮带输送机;CX-ProgrammerAbstractTransmission belt machines occupy a very important position in many businesses, but its control unit is variety,there is a difference between the performance and functionality. The traditional relay control of the transmission belt has complex circuits exist, poor reliability, fault diagnosis and rule out the difficulties shortcomings, in order to achieve the economic benefits of good corporate and social economic benefits,by using user-friendly,practical,strong PLC ladder (LADDER DIAGRAM) programming language on the belt transmission control system design.The topic is introduced the apply for Series C Omron PLC in four paragraphs belt transmission system of control,it is given the hardware and software design of the PLC control belt transmission systems,including the PLC Selection,I/O address assignment, I/O terminal wiring,programming and control theory. The design of the equipment improve the reliability of equipment and reduce the failure rate,it has been successful.Keywords:PLC(CJ1M);Ladder;Transmission belt machine;CX-Programmer目录第1章概述 (1)选题的背景 (1)课题的研究目的和内容 (2)课题研究的方案论证 (2)第2章可编程控制器理论基础 (4)PLC的由来及定义 (4)PLC的特点及分类 (5)PLC的应用及发展阶段 (8)PLC的结构及工作原理 (9)本章小结 (13)第3章PLC控制系统及程序的设计方法 (14)系统设计的主要内容及基本要求 (14)系统设计的基本步骤 (15)PLC硬件系统设计 (17)程序设计方法 (18)本章小结 (20)第4章皮带传输机的PLC设计 (22)皮带输送机的电控原理 (22)PLC控制系统硬件设计 (22)PLC控制系统软件设计 (24)PLC的调试与安装 (27)本章小结 (27)结论 (29)参考文献 (30)致谢 (31)附录1 (32)附录2 (40)第1章概述选题的背景近20年来,可编程控制器在我国已获得了极其重要和广泛的应用,它不仅可作为单一的机电控制设备,而且它作为通用的自动控制设备,也被大量的用于过程工业的自动控制。
毕业设计(论文)题目基于PLC的传送带控制系统设计目录摘要- 2 -第一章前言- 3 -1.1 传送带控制系统的背景- 3 -1.2 课程设计的目的- 4 -第二章概述- 6 -2.1 PLC的起源- 6 -2.2 可编程控制器的介绍- 6 -2.3 PLC的基本结构- 8 -2.4 PLC的功能- 9 -2.5 PLC与单片机的区别- 9 -2.6 带式输送机应用的行业与国的现状- 10 -第三章传送带控制系统的硬件设计- 12 -3.1系统控制分析- 12 -3.2 四节传送带的模拟实验面板图- 14 -3.3 PLC的选型- 15 -3.4 电动机接线图- 15 -3.5控制系统构成- 16 -第四章传送带控制系统的软件设计- 17 -4.1系统程序设计- 18 -4.2 程序中所使用的元件与功能见表- 18 -4.3顺序功能图- 19 -4.4控制系统的I/O信号的名称与地址分配表- 21 -4.5 PLC I/O点对应的外部电路代号- 22 -4.6控制系统梯形图程序与程序与程序注释- 23 -4.7 PLC程序梯形图与用户定义符号表- 24 -4.8 PLC程序语句表:- 32 -第五章传送带调试与故障与维护- 36 -5.1传送带的调试- 36 -5.2传送带的常见故障与维护- 37 -5.2.1传送带跑偏故障原因与解决方法- 37 -5.2.2传送带撒料的处理- 39 -结论- 41 -参考文献- 42 -致- 44 -摘要PLC是微机技术与传统的继电接触控制技术相结合的产物,它克服了继电器控制系统中的机械触点的接线复杂、可靠性低、功耗高、通用性和灵活性差的缺点,充分利用了微处理器的优点,又照顾到现场操作维修人员的技能与习惯,特别是PLC程序的编制,不需要专门的计算机编程语言知识,而是采用了一套以继电器梯形图为基础的简单指令形式,使用户程编制形象、直观、方便易学;调试与查错也都很方便。
基于PLC的运料传送带的控制系统设计摘要针对中小型皮带运输机的控制系统采用继电器控制,致使生产效率低,生产成本高,企业的竞争能力差,本文利用三菱FX2N系列PLC控制皮带输煤机,有手动控制和自动控制两种控制方式,实现了软件与硬件相结合的控制方法,是皮带运输机自动化控制系统改善和提高的一条有效途径,用四条皮带运输机的传送系统,分别用四台电动机带动,具有较高的应用推广价值。
该系统用可编程序控制器(PLC)作为控制核心,结合电动装置、称重传感技术的自动运输。
在软件设计中,给出了程序流程图,并设计出梯形图程序,出现故障时可及时发出警报信息。
此外,研究了MCGS在皮带运输机控制系统中的应用。
利用组态软件MCGS设计了皮带运输机控制系统监控界面,进而为维修和故障诊断提供了多方面的可能性,充分提高了系统的工作效率。
关键词:三菱PLC,皮带输送机,自动化AbstractAccording to the control system of small and medium sized belt conveyor with relay control, resulting in low production efficiency, high production cost, the enterprise competition ability, this paper makes use of the MITSUBISHI FX2N series PLC control of belt conveyer, a manual control and automatic control two control mode, control method realizes the combination of software and hardware, is a belt conveyor an effective way to improve the automation control system, transmission system with four belt conveyer, respectively with four motor drive, has a higher application value. The system uses programmable logic controller (PLC) as the control core, and combines pneumatic technology, sensing technology and position control technology to control the automatic transportation of products on-site. In the software design, the program flow chart is given, and the ladder diagram program is designed. When the failure occurs, the alarm information can be sent out in time. In addition, the application of MCGS in the control system of belt conveyer is studied. The monitoring interface of belt conveyor control system is designed by using configuration software MCGS, which provides many possibilities for maintenance and fault diagnosis, and improves the working efficiency of the system.Key words: MITSUBISHI PLC, belt conveyor, automation目录1 总体方案设计 (1)1.1皮带运输机的结构 (1)1.2运输机的工作流程 (2)1.2.1 启动 (2)1.2.2 停止 (3)1.3系统的设计内容 (3)2 皮带运输机装置控制系统的硬件设计 (4)2.1可编程控制器(PLC)的选型 (4)2.2传感器的选择 (5)2.3电机选择 (5)2.4通信接口 (5)2.5触摸屏 (6)2.6中间继电器 (6)2.7热继电器 (6)2.8接触器 (7)3 皮带运输机软件以及调试设计 (7)3.1运输机软件的流程图框架 (7)3.2电机正反转程序设计 (8)3.3运行和调试 (11)3.4组态MCGS界面运行的设计 (11)3.4.1MCGS的简介 (11)3.4.2 建立MCGS组态画面 (11)结论 (17)致谢 (18)参考文献 (19)附录一PLC接线图 (20)附录二梯形图程序 (21)附录三输入/输出分配表 (30)本论文以矿用皮带机电气控制系统为研究对象,针对现有煤矿的需要,进行基于PLC的矿用皮带机电气控制系统的设计,使其达到高效率、高节能,高自动化的水平。
《基于PLC的矿用皮带运输的控制系统》文
献综述
容摘要
皮带运输机是一种有牵引件的连续运输设备,广泛应用于矿产开采、金属冶炼、化工、铸造等行业的生产线和输送线以及港口的生产部门。
主要用来运送物料,根据输送工艺的要求,可以单台输送,也可以多台组合输送,或者和其它输送设备组成水平或倾斜的输送系统。
煤矿的输送系统对保证矿井正常生产起着极其重要的作用。
本设计主要叙述了利用先进的PLC技术对煤矿企业皮带机系统进行技术改造方案,并且叙述了皮带机的基本原理、皮带机集中控制系统设计步骤。
PLC是一种专门在工业环境下应用而设计的数字运算操作的电子设备。
它采用可编程存储器,用来在其部存储执行逻辑运算、顺序运算、计时、计数和算数运算等操作的指令,并能在其部存储进行数字或模拟式的输入和输出,控制各种类型的机械或生产过程。
关键词:煤矿;皮带运输机;集中控制系统;PLC
国外皮带运输机的研究现状
国外在皮带运输机动态分析研究方面发展的比较早,动态分析理论与研制的软件已经基本能够满足当前的发展需求;而我国则比较晚,跟国外相比,还存在比较大的差距,尤其是动态分析的软件部分。
为了尽快弥补差距,赶超世界先进水平,有必要研究跟分析当今国外皮带运输机的动态分析软件。
目前,美国、法国意大利等发达国家在动态分析研究方面,已经达到了国际领先地位。
我国生产制造的上运式带式输送机的种类较多。
在“八五”时期,通过国家一条龙“日产万吨综采设备”项目实施,皮带运输机的技术水平有了很大的提高,煤矿井下用大功率、长距离带式输送机的关键技术研究和新产品开发都取得了很大的进步。
如大倾角、长距离带式输送机成套设备、高产高效工作面顺槽可伸缩带式输送机等都填补了国空白,并对带式输送机的主要元部件进行了理论研究跟产品的开发,研制成功了多种软启动和制动装置以及以PLC为核心的可编程电控装置,驱动系统采用可调速型液力耦合器和行星齿轮减速器。
皮带运输机的集中控制系统的发展及存在问题
在煤矿中,煤流的输送大部分在几百米到十几公里之间,因此它的运输系统要有多台皮带输送机、给煤机、煤仓等组成,协调配合完成长距离运输任务。
为保证运输系统的安全可靠性,提高运输效率,对其进行完善的管理跟监控是现代煤矿流运输迫切需要的一项技术。
随着矿井规模的不断扩大,计算机技术、网络技术、新的工业控制器技术等新技术的应用,对皮带运输机的集中控制系统也得到了飞速发展。
从单台控制系统到多台的集中控制系统,有价格相对较贵的PLC构成的系统和低廉的单片机应用系统。
目前,虽然市场上有着各式各样方案构成的集中控制系统,但发展的方向是一致的,那就是朝自动化、智能化、信息化的方向发展。
皮带运输机的综合自动化控制是整个矿井实现自动控制的重要组成部分。
目前对皮带输送机集中控制系统存在的主要问题包括:
(1)在安全保护方向,为了提高皮带输送机运行的可靠性、安全性,减少故障,提高效率,多种检测方法已应用于电动机、液力耦合器、减速器和皮带运行系统故障检测,但这些系统都是独立的。
(2)故障检测系统误报率高。
误报将造成皮带输送机不应有的停机,使全矿井停产,对矿井生产造成极大影响。
(3)皮带机的控制、运行、保护等信息不能较好的与矿井其他控制系统共享,不能与整个矿井信息系统的集成。
视频监视系统不规,没有语音通信功能,不能实现无人值守。
课题的研究目的
皮带输煤系统是工矿企业中较为庞大的一个公共系统,现阶段的大对数企业中,其输送过程是通过皮带输送机来完成的,整个输煤系统有多台输送距离较长的皮带输送机组成。
皮带输送机具有结构简单、经济方便、使用可靠、输送平稳、输送量大、效率高、噪音低等优点。
其形式多样,适用围广,特别适合一些散碎原料与不规则物品的输送。
由于PLC将其系统的继电技术、计算机技术和通信技术融为一体,以其可靠性高、稳定性好、抗干扰能力强、维护方便等优点,广泛应用于工业生产过程控制和自动控制中。
设置性能完善、质量可靠、技术先进的可编程PLC控制皮带运输机监控系统,可以实现高自动化的皮带机群的集中控制及保护。
本次设计研究的主要容
(1)多种操作方式。
每台设备机头旁均设有就地操作控制箱,上有工作方式转换开关。
控制方式有:程序自动、就地手动、程序手控方式,使系统操作灵活、可靠。
所有设备由集控室操作员通过上位机操作。
(2)多种流程操作。
在联动方式下,可根据工艺选择运输流程,胶带启动顺煤流方向,并根据胶带速度、长度延时开车,以减少运行时间;重载启动时,逆煤流方向启动;系统停止或无煤时延时自动停车。
采用PLC实现皮带运输机的一键开机、一键关机、紧急情况下的一键逆向运动控制等控制方式灵活。
(3)完善胶带机保护。
在胶带机上设置跑偏、打滑、撕裂传感器等,当检测到故障时,系统进行报警,严重故障时紧急停车,有效地防止事故的发生和故障扩大化。
(4)主胶带运输机主动滚筒和机头设置并联运行的双温度、烟雾传感器,并设置超温洒水装置。
当检测到烟雾或超温时系统报警、设备停机并自动洒水。
(5)运行中对电机电流进行实时监测分析,故障的声光报警:当系统预定义的故障参数超限时能够实现声光报警,当发生电流超限或突变时报警,严重时停机。
(6)实现运输系统集中监控,实时监控设备状态和运行参数,将重要信息记录在硬盘上。
研究思路和方法
(1)分析所控制的设备或系统,是否符合编程控制要求。
(2)I/O赋值(分配输入输出)。
(3)设计控制原理图。
(4)程序写入PLC。
(5)编辑调试修改的程序。
(6)监视运行情况。
(7)运行程序。
矿井皮带运输系统的意义
矿井皮带运输系统,由多条皮带搭接或由煤仓形成的煤流输送系统,因此其部的基本运输单元就是单台皮带机。
其具有以下特点:
(1)结构简单,安全可靠
带式输送帆的结构由传动滚筒、改向液筒、托辊、驱动装置和输送机等几大组建,不仅能进行标准化生产,而且生产过程中噪声较小,维修费用低,只要输送带不断裂,就能安全使用几十年。
(2)适用围广、输送力强
带式输送机的运输带有各种宽度,其承载断面有平型、槽型、波纹挡边型、管型等,因此可以输送各种矿石,运送能力从每小时几公斤到几万吨不等,在连续装载的条件下,能持续输送。
并且能在输送机的任何地点进行装料和卸料,也可以再回程段上装、卸料。
(3)对线路适应性强、远距长
带式输送机的单机长度可达几十公里,且中间无需任何载点。
能进行水平或倾斜输送,爬坡能力强。
(4)基建低投资、运营低费用
使用皮带运输机可以缩短运输距离,与机动车相比,无需道路建设投资,极大的节省了基建投资。
皮带运输机的磨损件只有托辊跟皮带,它们的使用寿命长,并且皮带输送机自动化程度高,使用人员少,低能耗,所以运营费用低。
发展前景
随着石油、劳动力、环保及各种费用的快速上涨,车辆运输成本迅速升高,带式运输机越来越显示出它的集约化、自动化、连续化、高速化、简单化、清洁化、环保化、安全化的突出优势。
近年来,比较大型的正规矿山,物料输送基本都采用带式输送机。
随着液压自动涨紧技术、转弯技术、胶带防跑偏技术、监控技术,特别是变频技术在带式输送机的应用,长距离、大运量、高速度带式输送机的可靠性、安全性都得到了很大幅度的提高,转弯多,上运和下运,胶带的翻转等关键技术都得到了解决。
参考文献
[1] 柴瑞娟.西门子PLC编程技术及工程应用[M]. :机械工业,2004:50-94
[2] 胡涛松.自动化控制原理[M].第四版.科学,2001:22-27
[3] SIMATIC S7-300可编程序控制器硬件和安装手册.西门子(中国),1999
[4]王永华. 现代电气控制及PLC应用技术[M]. 航空航天大学,2005:45-96
[5]廖常初等.S7-300/400PLC应用技术[M].:机械工业.2004.8.
[6] . 电力拖动与控制[M]. :中国矿业大学
[7] 尚莉, 兴. PLC在数据采集和处理中的应用[J], 控制工程, 2003(10): 19-20
[8] 正军.主编.计算机控制系统.机械工业
[9] 燕南.主编.皮带运输机的PLC控制.中国科技信息
[10] Michel Gilles.Programmable Logic Controllers:Architecture And Application Wiley[M].San Francisco,1990.
[11] G.L.Batten. Prpgrammable Controllers:hardware.software And Application[M].New York:MC Graw-Hill.1994。