- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
绝对运动是动点相对于静系的运动, 运动是 的运动,
这种运动是点的运动.
相对运动
我们在飞机上固结一个坐标系, 飞机在飞行, 我们在飞机上固结一个坐标系 , 飞机在飞行 , 此坐标系与飞机一起运动,称为动坐标系; 此坐标系与飞机一起运动,称为动坐标系; 从飞机上看动点的运动, 从飞机上看动点的运动 , 等价于从动系看动点 的运动,我们将这种运动称为相对运动; 的运动,我们将这种运动称为相对运动;
小和方向都不变. 因此
′ ′ υe +υr =υe +υr
υr
υa
θ
将上式投影到轴x方向:
′ ′ υe =υe υr cos45 ′ υr cos45 =84 = 4
′ υr
45
υe = 4
′ υa ′ υe =8
′ ′ ′ 由 υa =υe +υr 式向y方向投影:
′ ′ υa sinθ =υr sin 45 ′ υa = 4/ sinθ
牵连 运动 是 动系相对于静系 的运动 , 运动是 的运动, 刚体的运动 这种运动是刚体的运动.
新问题
绝对运动和相对运动都是点的运动, 绝对运动和相对运动都是点的运动 , 而牵连运 动却是刚体的运动, 动却是刚体的运动,点的运动无法同刚体的运动 加以合成. 加以合成. 因此必须在刚体上( 即动坐标系上) 因此必须在刚体上 ( 即动坐标系上 ) 找到一点 在此瞬时带动动点运动的点, 在此瞬时带动动点运动的点,我们将这个点称为
向 x 轴投影: υe =υa cosθ
υ υ cosθ ωO B = e = a 1
OA 1 OA 1
cosθ = 1sin2 θ O A= 1 O sin(180 θ ) A sin
例2
已知:凸轮以匀速度υ向左移动. 试求:θ=30°时,B的速度.
θ
解: 动点,动系的选择
动点B:作直线运动 动系凸轮:作平动 动点相对动系作圆周运动
2 3ω r 0 3
例5
已知:v1,v2 , 试求 两杆交点M的速度.
A
υe
M C
υ2
υ1 υr B
D
解:将动系固结于AB杆
再将动系固定于CD杆 1,
υa = υe + υr = υ +υr 1
√ ? √ √
2,
′ υa =υe +υr =υ2 +υr
大小: ? 方向: ?
? ?
√
?
υ2
√ √
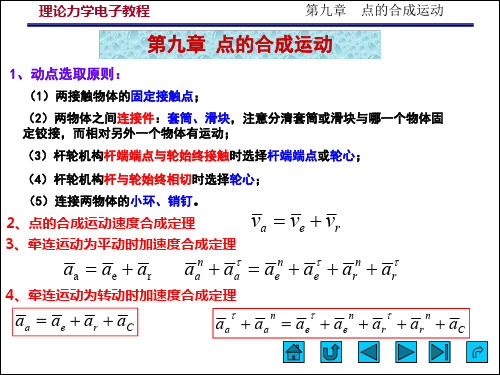
运动的分解: 运动的分解:动点动系的选择
若选杆为动系, 若选杆为动系,圆上一点为动点
曲柄摇杆机构
动点动系的正确选择
猜一猜相对轨迹
不适当的选择
平底凸轮机构的运动分解
选法1 选法1 Х
选法2 选法2 Х
选法3 选法3 √
二,速度合成定理
动点相对静系的速度为绝对速度, 记作: va 动点相对动系的速度为相对速度, 记作: vr 牵连点相对静系的速度为牵连速度, 记作: ve
速度合成定理 动点:M 定系:oxyz 动系:o'x'y'z' 固结在运动 物体上(载体)
M(M′)
r′
y′
r
z′
ro′
o′ x′
o
dr′ d′r′ = +ω×r′ dt dt
r = r′ +r ′ o
dr dr′ dr ′ = + o dt dt dt
dr d′r′ dr ′ = + o +ω ×r′ e dt dt dt
牵连点.
观察水轮机中的水滴的牵连点
观察动点M的牵连点m 观察动点M的牵连点m
观察动点M的牵连点m 观察动点M的牵连点m
归纳
定义牵连点:
牵连点是动坐标系上此瞬时与动点相 重合的点,具有瞬时性.
观察动点M的牵连点m 观察动点M的牵连点m
动点动系的选择规律
要求解点的合成运动,首先必须正确地将运 要求解点的合成运动, 动分解,也就是正确地选择动点,动系. 动分解,也就是正确地选择动点,动系. (1)首先必须满足动点,动系分别在两个物体 首先必须满足动点, 上,否则就没有相对运动,即运动得不到分解. 否则就没有相对运动,即运动得不到分解. (2)我们必须选择动点相对动系的相对运动轨 迹为已知的,简单的情况. 迹为已知的,简单的情况.
′ ′ ′ x方向: υa cosθ =υe υr cos45 = 4 ∴ θ = 45
′ υa = 4/ cosθ
′ υa =υa = 4 2 =5.66
例4
图示刨床的滑道摇杆机构,已知曲柄OA 的匀角速为ω0, 图示刨床的滑道摇杆机构,已知曲柄 曲柄 , 试求:当曲杆水平时, 的角速度, 的速度 的速度. 试求:当曲杆水平时,杆O1D的角速度,CE的速度. 的角速度
解: 动点A,B,动系:O1D
υAa =υAe +υAr
1 υAe =υAa sinα =ω0OA sin30 = rω0 2 υAe 1 ωO D = = ω0 1 OA 4 1
υBa
υAe
υBe
υAa υBr
υAr
υBa =υBe +υBr
υCE =υBa =υBe / cosα =ω 1DO B/ cos30 = O 1
例6
在图示平面机构中,半径R = 15 cm的圆凸轮以匀角速度ω = 2 rad/s绕 O轴转动,带动半径r = 3 cm的小轮,使铰接于小轮轮心A的顶杆AB作铅 垂平动,小轮与凸轮间无相对滑动,OC = e = 6 cm.若以A为动点,凸轮 为动系,试求图示 = 60°,∠OCA = 90°位置时点A的速度 . 动点:小轮A的圆心,作圆周运动 动系凸轮:作定轴转动 动点相对动系作圆周运动
va = vr +vo′ +ω ×r′ e
vo′ +ω ×r′ = ve e
动系上与动点M重合的点M'(牵 连点)的速度
υa = υe + υ r
绝对速度 牵连速度
相对速度
速度合成定理 —— 动点的绝对速度等于其牵连速 度与相对速度的的矢量和. 度与相对速度的的矢量和.
几点说明
(1)速度合成定理是牵连为任意运动时 推导的,即适用牵连运动为各种不同的运 动. (2)速度合成定理是三个矢量的关系, 只有知道了两个矢量,才能求出第三个矢 量.其对平面机构,有两个投影式,即需 已知四个量才能求出两个未知量(速度的 大小或方向).
相对运动是动点相对于动系的运动, 运动是
这种运动也是点的运动.
牵连运动
除了这两种运动之外, 除了这两种运动之外,还存在着动系相对与 静系的运动,我们将这种运动称为牵连运动 牵连运动; 静系的运动,我们将这种运动称为牵连运动; 牵连的含义是"带动"的意思, 牵连的含义是"带动"的意思,就好比我们 乘车,不管研究我们身上的哪一点, 乘车,不管研究我们身上的哪一点,所有的点均 被车带动着,此时不必考虑车的形变, 被车带动着,此时不必考虑车的形变,也就是将 车看作刚体. 车看作刚体.
解:取空气微团M为动点 动系固定在人身上.牵连速度即人的行走速度υe =υ
υr
υa
θ
′ υr
45
′ υa ′ υe =8
υe = 4
υa =υe +υr
大小 ? √ ? 方向 ? √ √
′ ′ ′ υa =υe +υr
? √ ? ? √ √
注意:绝对速度υa及夹角θ,无论坐标怎样选取,其大 注意:
υa =υr +υe
大小 √ ? ?
方向 √ √ √
向 y轴投影:
υa =υr +υe
x
υr =υa sinθ
υa =ωO A
O 1 O O A = sinθ sin sinθ = sin O1 O O A
υe
υa
θ
y
υr
A
υr =ωO × A
O 1 sin O =ωO 1 sin O O A
由于 υa不随动系而变
′ υ +υr =υ2 + υr 1
υe
A C
′ υr
M
υ1
B
D
大小:√ ? 方向: √ √
√
?
√ √
′ υ +υr =υ2 + υr 1
υ2
将上式投影到垂直于AB方向:
′ υ +O =υ2 cos +υr sin 1
A C
υe
υ1
M υr B
D
将上式投影到垂直于CD方向:
例1
已知:杆OA的ω=10rad/s , OA=25cm , 端点铰接一套筒, 杆OB穿过套筒, OO1= 60cm, =60°试求:杆O1B的角速度和 套筒相对杆O1B的速度( ωO B, ). υr
1
υe
υa
υrΒιβλιοθήκη 解:1°动点,动系的选择 动点, 动点 动点: 套筒A,作圆周运动 : A 动系:杆O1B,作定轴转动 动点相对动系作直线运动 2° 画矢量图(速度矢图) ° 画矢量图(速度矢图)
υ1cos υr sin =υ2
′ 再利用(1)或(2)将 υr 或υr 代入
2 υa = υ2 +υr = 1
υ2
υe
A C
′ υr
M
υ1
B
D
1 2 υ2 +υ2 2 1 2 cos υυ 1 sin υ υ sin 1 tan = 1 = 与 的 角 AB 夹 β υr υ cos υ2 1
第 七章 点的复合运动
观察椭圆规机构点A 观察椭圆规机构点A,M的关系
观察摇杆滑块连杆机构
一,运动的分解