理论力学5—点的运动学
- 格式:ppt
- 大小:1.26 MB
- 文档页数:37
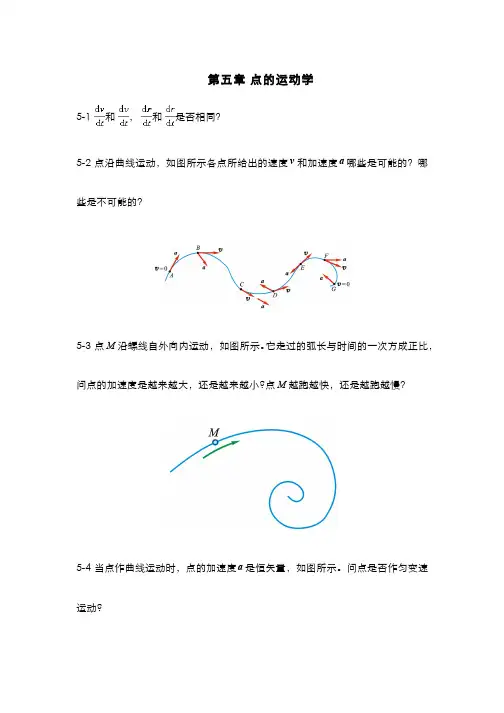
第五章 点的运动学5-1和 , 和 是否相同?5-2点沿曲线运动,如图所示各点所给出的速度v和加速度a哪些是可能的?哪些是不可能的?5-3点M 沿螺线自外向内运动,如图所示。
它走过的弧长与时间的一次方成正比,问点的加速度是越来越大,还是越来越小?点M越跑越快,还是越跑越慢?5-4当点作曲线运动时,点的加速度a是恒矢量,如图所示。
问点是否作匀变速运动?5-5 作曲线运动的两个动点,初速度相同、运动轨迹相同、运动中两点的法向加速度也相同。
判断下述说法是否正确:(1)任一瞬时两动点的切向加速度必相同;(2)任一瞬时两动点的速度必相同;(3)两动点的运动方程必相同。
5-6 动点在平面内运动,已知其运动轨迹)(x f y 及其速度在x 轴方向的分量。
判断下述说法是否正确:(1)动点的速度可完全确定;(2)动点的加速度在x 轴方向的分量可完全确定;(3)当速度在x 轴方向的分量不为零时,一定能确定动点的速度、切向加速度、法向加速度及全加速度。
5-7 下述各种情况,动点的全加速度,切向加速度和法向加速度三个矢量之间有何关系?(1)点沿曲线作匀速运动;(2)点沿曲线运动,在该瞬时其速度为零;(3)点沿直线作变速运动;(4)点沿曲线作变速运动。
5-8 点作曲线运动时,下述说法是否正确:(1)若切向加速度为正,则点作加速运动;(2)若切向加速度与速度的符号相同,则点作加速运动;(3)若切向加速度为零,则速度为常矢量。
5-9 在极坐标系中,ρρ =v ,ρϕϕ =v 分别代表在极径方向与极径垂直方向(极角ϕ的方向)的速度。
但为什么沿这两个方向的加速度为2ϕρρρ -=a ϕρϕρϕ 2+=a 试分析ρa 中2ϕρρ -=a 和ϕa 中的ϕρ 出现的原因和它们的几何意义。
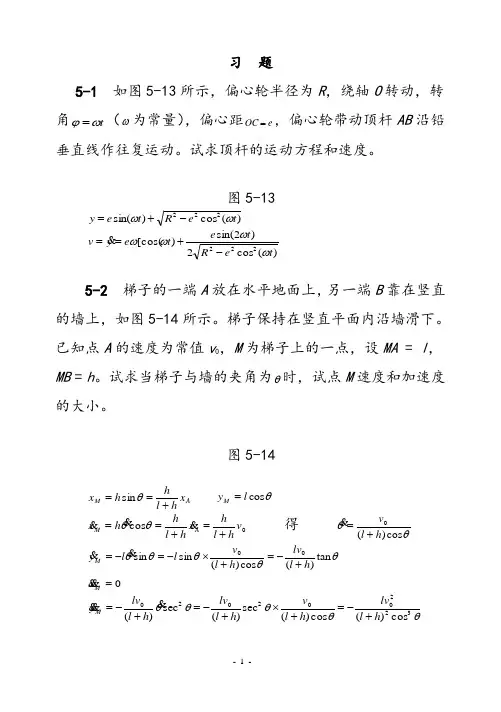
习 题5-1 如图5-13所示,偏心轮半径为R ,绕轴O 转动,转角t ωϕ=(ω为常量),偏心距e OC =,偏心轮带动顶杆AB 沿铅垂直线作往复运动。
试求顶杆的运动方程和速度。
图5-13)(cos )sin(222t e R t e y ωω-+=)(cos 2)2sin()[cos(222t e R t e t e yv ωωωω-+==5-2 梯子的一端A 放在水平地面上,另一端B 靠在竖直的墙上,如图5-14所示。
梯子保持在竖直平面内沿墙滑下。
已知点A 的速度为常值v 0,M 为梯子上的一点,设MA = l ,MB = h 。
试求当梯子与墙的夹角为θ时,试点M 速度和加速度的大小。
图5-14A M x hl hh x +==θsin θcos l y M = 0cos v h l h x h l h h xA M +=+== θθ 得 θθcos )(0h l v +=θθθθθt a n)(c o s )(s i n s i n 00h l lv h l v l l yM +-=+⨯-=-= 0=M xθθθθθ322002020cos )(cos )(sec )(sec )(h l lv h l v h l lv h l lv y M +-=+⨯+-=+-=θ3220cos )(h l lv a M+=5-3 已知杆OA 与铅直线夹角6/πt =ϕ( 以 rad 计,t 以s 计),小环M 套在杆OA 、CD 上,如图5-15所示。
铰O至水平杆CD 的距离h =400 mm 。
试求t = 1 s 时,小环M 的速度和加速度。
图5-15ϕtan h x M = ϕϕϕ22sec 6π400sec ⨯== h xM ϕϕϕϕϕϕϕs i n s e c 9π200s i n s e c 6π3π400)s i n s e c 2(6π4003233=⨯⨯=⨯⨯= M x当s 1=t 时6π=ϕmm/s 3.2799π800346π400)6π(sec 6π4002==⨯==Mv 223232mm/s 8.168327π80021)32(9π200)6πsin()6π(sec 9π200==⨯⨯=⨯⨯=Ma5-4 点M 以匀速u 在直管OA 内运动,直管OA 又按t ωϕ=规律绕O 转动,如图5-16所示。
第五章点的运动学本章将研究点的运动,包括点的运动方程、运动轨迹、速度、加速度等。
点的运动学也是研究刚体运动的基础。
第一节点的运动方程点在取定的坐标系中位置坐标随时间连续变化的规律称为点的运动方程。
点在空间运动的路径称为轨迹。
在某一参考体上建立不同的参考系,点的运动方程有不同的形式。
一、矢量法设点作空间曲线运动,在某一瞬时t ,动点为M,如图5-1所示。
选取参考体上某固定点O为坐标原点,自点O向动点M作矢量r,称r为点M相对于原点O的矢径。
当动点M运动时,矢径r随时间而变化,并且是时间的单值连续函数,即(5-1)上式称为矢量形式表示的点的运动方程。
显然,矢径r的矢端曲线就是动点的运动轨迹。
图5-1二、直角坐标法过点O建立固定的直角坐标系Oxyz,则动点M在任意瞬时的空间位置也可以用它的三个直角坐标x , y , z表示,如图5-1所示。
由于矢径的原点和直角坐标系的原点重合,矢径r可表为(5-2)式中i , j , k 分别为沿三根坐标轴的单位矢量。
坐标x , y , z也是时间的单值连续函数,即(5-3)式(5-3)称为点的直角坐标形式的运动方程,也是点的轨迹的参数方程。
三、自然法当动点相对于所选的参考系的轨迹已知时,可以沿此轨迹确定动点的位置。
在轨迹上任取固定点O 作为原点,选定沿轨迹量取弧长的正负方向,则动点的位置可用弧坐标s 来确定。
如图5-2所示。
动点沿轨迹运动时,弧长s 是时间的单值连续函数(5-4)上式称为点用自然法描述的运动方程。
图5-2以上三种形式的运动方程在使用上各有所侧重。
矢量形式的运动方程常用于公式推导;直角坐标形式的运动方程常用于轨迹未知或轨迹较复杂的情况;当轨迹已知为圆或圆弧时,用自然法则较为方便。
第二节点的速度和加速度动点运动的快慢和方向用速度表示,速度的变化情况则用加速度表示。
下面给出在各坐标系下,速度、加速度的数学表达式。
一、用矢量法表示点的速度和加速度如动点矢量形式的运动方程为r=r(t) ,则动点的速度定义为(5-5)即动点的速度等于动点的矢径r对时间的一阶导数。